Académique Documents
Professionnel Documents
Culture Documents
Experimento 6
Transféré par
David AlmeidaCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Experimento 6
Transféré par
David AlmeidaDroits d'auteur :
Formats disponibles
UNICAMP Faculdade de Engenharia El etrica
e de Computac ao
EA-619 Laborat orio de An alise Linear
Experi encia 6: Amostragem de Sinais Contnuos
28 de maio de 2012
Sum ario
1 Introduc ao 2
2 S erie de Fourier 2
2.1 S erie de Fourier Trigonom etrica . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 S erie de Fourier Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3 A Amostragem de Sinais 5
4 Convoluc ao e Func ao Impulso 7
5 Teorema da Amostragem 8
6 Sinais de Banda Ilimitada 11
7 Filtragem 11
7.1 Segurador de Ordem Zero . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7.2 Filtro Passa-Baixa de 2a. Ordem . . . . . . . . . . . . . . . . . . . . . . . . 15
8 Experimentos 18
8.1 Sistema Retilneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
8.1.1 Procedimento Experimental para o Sistema Retilneo . . . . . . . . . 21
8.2 Sistema Torcional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
8.2.1 Procedimento Experimental para o Sistema Torcional . . . . . . . . . 23
8.3 Emulador Industrial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
8.3.1 Procedimento Experimental para o Emulador Industrial . . . . . . . . 25
8.4 P endulo Invertido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
8.4.1 Procedimento Experimental para o P endulo . . . . . . . . . . . . . . 28
8.5 Levitador Magn etico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.5.1 Procedimento Experimental para o Levitador . . . . . . . . . . . . . 30
Relat orio 30
1 Introduc ao
No contexto de comunicac oes e controle, amostrar um sinal contnuo f (t) signica substituir
o sinal por seus valores num conjunto discreto de pontos, ou seja, substituir f (t) por f (t
k
),
onde k pertence ao conjunto dos inteiros.
Quando os instantes de amostragems ao igualmente espacados, isto e, t
k
=kT, a amostragem
e chamada peri odica, com perodo T. A freq u encia correspondente f
s
= 1/T e chamada
freq u encia de amostragem.
Nesta experi encia, apresenta-se a descric ao matem atica do processo de amostragem, que
conduz ao c elebre Teorema de Shannon, que trata da freq u encia mnima de amostragem. Al-
guns ltros, que t em por objetivo reconstruir o sinal contnuo f (t) a partir da seq u encia de
n umeros { f (kT)}, s ao tamb em apresentados.
2 S erie de Fourier
Seja f (t) uma func ao real da vari avel real t (associada com o tempo), contnua por partes em
qualquer intervalo nito e peri odica, com perodo T.
Exemplo 1 - Considere a func ao peri odica trem de pulsos, descrita no primeiro perodo, 0 <
t T, por:
f (t) =
_
_
A, 0 < t
!
2
, e T
!
2
< t T
0,
!
2
< t < T
!
2
T T T T
A
f (t)
t
!
2
!
2
Figura 1: Trem de Pulsos
Func oes com as propriedades descritas acima podem ser expandidas em uma soma innita
de termos em senos e cossenos ou de exponenciais, chamada de S erie de Fourier.
2.1 S erie de Fourier Trigonom etrica
Uma func ao f (t) peri odica, com perodo T = 2"/#
0
, contnua por partes, pode ser represen-
tada em termos de func oes cos(n#
0
t) e sin(n#
0
t), n inteiro, da seguinte maneira:
f (t) = a
0
+
$
%
n=1
[a
n
cos(n#
0
t) +b
n
sin(n#
0
t)] (1)
onde (t
0
arbitr ario)
a
0
=
1
T
t
0
+T
t
0
f (t)dt
a
n
=
2
T
t
0
+T
t
0
f (t)cos(n#
0
t)dt
b
n
=
2
T
t
0
+T
t
0
f (t)sin(n#
0
t)dt
2.2 S erie de Fourier Exponencial
Uma forma mais interessante de representac ao da func ao f (t) e obtida em termos da soma de
exponenciais exp( jn#
0
t), n inteiro:
f (t) =
$
%
n=$
F
n
exp( jn#
0
t) (2)
onde
F
n
=
1
T
t
0
+T
t
0
f (t)exp(jn#
0
t)dt (3)
e exp( jn#
0
t) = cos(n#
0
t) + j cos(n#
0
t).
Pode-se mostrar que os coecientes das s eries de Fourier trigonom etrica e exponencial
est ao relacionados da seguinte forma:
a
0
= F
0
a
n
= F
n
+F
n
b
n
= j (F
n
F
n
)
F
n
=
1
2
(a
n
jb
n
)
A express ao (2) fornece a representac ao de uma func ao real peri odica em termos de
func oes exponenciais de freq u encias 0, #
0
, 2#
0
, . . . , etc. Note que exp( jn#
0
t) e
exp(jn#
0
t) podem ser considerados fasores com fases denidas por n#
0
t que giram em
sentidos opostos, e que somados fornecem uma func ao real de t, ou seja,
exp( jn#
0
t) +exp(jn#
0
t) = 2cos(n#
0
t)
O coeciente F
n
representa a componente de freq u encia n#
0
existente na func ao f (t). Este
coeciente e em geral um n umero complexo, podendo portanto ser descrito por sua magnitude
e sua fase. As magnitudes e fases dos coecientes F
n
constituem, respectivamente, o espectro
de magnitudes e o espectro de fases da representac ao freq uencial da func ao real peri odica
f (t).
Exemplo 2 - Considere a func ao peri odica trem de pulsos do Exemplo 1. Da equac ao (3),
tem-se
F
n
=
1
T
!/2
!/2
Aexp(jn#
0
t) dt =
A!
T
_
sin(n#
0
!/2)
(n#
0
!/2)
_
Observe que F
n
= F
n
e que, portanto, b
n
= 0, a
0
= A!/T e a
n
= 2F
n
. Assim,
f (t) =
A!
T
+2
$
%
n=1
F
n
cos(n#
0
t)
Note que F
n
e real; seu espectro de magnitudes e mostrado na Fig. 2, para ! = 1/20, A = 5 e
T = 1/4. A envolt oria em pontilhado corresponde ` a func ao sin(x)/x.
-15 -10 -5 0 5 10 15
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
n
F
n
A/5[sin(n"/5)/(n"/5)]
Figura 2: Espectro de magnitudes para A = 5.
2.3 Transformada de Fourier
Considere agora o problema de representac ao de uma func ao f (t), contnua por partes, peri odica
ou n ao, em termos de func oes exponenciais. Suponha que
+$
$
| f (t) | dt < $
Pode-se mostrar, neste caso, que
f (t) =
1
2"
+$
$
F(#)exp( j#t)d# (4)
onde
F(#) =
+$
$
f (t)exp(j#t)dt (5)
A equac ao (4) corresponde ` a representac ao de f (t) como uma soma contnua de func oes
exponenciais com freq u encias no intervalo # [$, +$].
A func ao F(#) representa o espectro de freq u encias de f (t) e e chamada Func ao Densi-
dade Espectral. F(#) corresponde ` a representac ao da func ao f (t) no domnio freq uencial.
Note que na s erie de Fourier, o espectro de freq u encias existe somente nos pontos #
n
= n#
0
.
Aqui, o espectro de freq u encias e denido para todos os valores de #.
A equac ao (5) e conhecida como a Transformada de Fourier de f (t) e a equac ao (4) como
a Transformada Inversa de F(#). Em geral, a func ao F(#) e complexa, podendo portanto ser
representada por sua magnitude | F(#) | e sua fase &(#), ou seja,
F(#) = | F(#) | exp( j&(#))
Exemplo 3 - Seja a func ao exponencial
0
0 0.5
1
1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
1.2
t
exp(t)
Figura 3: Func ao f (t) = exp(t), t > 0.
f (t) =
_
_
_
exp(at) , a > 0 , t 0
0 t < 0
Da,
F(#) =
$
0
exp[(a+ j#)t] dt =
1
a+ j#
Portanto
| F(#) | =
1
a
2
+#
2
1
#
, # a ; &(#) =arctan
_
#
a
_
Na Fig. 4 est ao tracados |F(#)| e &(#). Note que as abcissas das guras est ao repre-
sentando o eixo imagin ario no plano complexo s = '+ j#; assim, os valores negativos no
semi-eixo # < 0 representam o conjugado ' j#, com ' 0.
3 A Amostragem de Sinais
O dispositivo que realiza a operac ao de amostragem e chamado amostrador. Basicamente, o
amostrador converte um sinal contnuo num trem de pulsos modulados em amplitude.
-5 0 5
0
0.2
0.4
0.6
0.8
1
1.2
-5 0 5
-1.5
-1
-0.5
0
0.5
1
1.5
# #
r
a
d
| F(#) |
&(#)
Figura 4: M odulo e fase de F(#) - Exemplo 3.
A Fig. 5 mostra a representac ao simb olica de um amostrador peri odico com perodo T e
durac ao de amostragem igual a (. O intervalo de tempo ( e aquele durante o qual a chave e
fechada e o sinal f (t) e rastreado. A sada do amostrador f
(t) e um trem de pulsos de largura
(, cujas amplitudes s ao moduladas pelo sinal contnuo f (t).
f (t)
T
(()
f
(t)
Figura 5: Processo de Amostragem.
A Fig. 6 mostra a representac ao simb olica do amostrador como um modulador de ampli-
tude de pulsos. A sada do modulador f
(t) e igual ao produto f (t)p(t), onde p(t) e um trem
de pulsos com perodo T e amplitude unit aria, isto e
p(t) =
$
%
k=$
u(t kT) u(t kT (), ( < T (6)
e u(t) e a func ao degrau unit ario.
f (t)
Modulador
de Pulsos
(()
f
(t)
Figura 6: Amostrador em representac ao simb olica.
A Fig. 7 mostra formas de sinal tpicas para f (t), p(t) e f
(t):
f (t)
p(t)
T (
t
t
t
f
(t)
Figura 7: Sinal f (t) e sinal amostrado.
4 Convoluc ao e Func ao Impulso
Considere f
1
(t) e f
2
(t) duas func oes contnuas da vari avel real t, e tamb em a integral
f (t) =
$
$
f
1
()) f
2
(t ))d) (7)
A integral (7) dene a convoluc ao entre duas func oes, e e representada simbolicamente
por
f (t) = f
1
(t) f
2
(t) (8)
A convoluc ao induz duas propriedades importantes apresentadas a seguir. Para facilitar a
exposic ao, considere a notac ao
f (t) F(#) (9)
identicando a func ao f (t) e sua transformada de Fourier F(#) (obviamente, f (t) e a trans-
formada inversa de F(#)).
Propriedade 1 - Convoluc ao no domnio do tempo: se
f
1
(t) F
1
(#) ; f
2
(t) F
2
(#) (10)
ent ao
f
1
(t) f
2
(t) F
1
(#)F
2
(#) (11)
Propriedade 2 - Convoluc ao no domnio da freq u encia: se a relac ao (10) vale, ent ao
f
1
(t) f
2
(t)
1
2"
[F
1
(#) F
2
(#)] (12)
A propriedade 1 arma que a convoluc ao de duas func oes no domnio do tempo equiv-
ale ` a multiplicac ao das respectivas transformadas de Fourier no domnio da freq u encia. A
propriedade 2 e sim etrica em relac ao ` a propriedade 1.
Considere agora a seguinte func ao pulso:
t
t
0
t
0
+(
1/(
Figura 8: Pulso de area unit aria.
!
(
(t t
0
) =
_
_
0 , t < t
0
1/( , t
0
t <t
0
+(
0 , t t
0
+(
(13)
Note que !
(
(t t
0
) tem area unit aria para qualquer valor de (. Quando ( se aproxima de
zero, a func ao limite
!(t t
0
)
= lim
(0
!
(
(t t
0
) (14)
e chamada de func ao impulso. Esta func ao possui a seguinte propriedade:
$
$
!(t t
0
)dt =
t
0
+*
t
0
*
!(t t
0
)dt = 1 (15)
e, se f (t) e contnua em t,
$
$
f (t)!(t t
0
)dt = f (t
0
) (16)
Da express ao (16), pode-se concluir que a transformada de Fourier da func ao impulso e
1, ou seja
F [!(t)] =
$
$
!(t)exp(j#t)dt = 1 (17)
Considere agora f (t) uma func ao contnua. De (16), obt em-se
f (t) !(t) =
$
$
f ())!(t ))d) = f (t) (18)
ou seja, a convoluc ao de uma func ao contnua f (t) com a func ao impulso !(t) reproduz a
pr opria func ao f (t). Em outras palavras, o impulso e o elemento neutro da convoluc ao.
5 Teorema da Amostragem
Suponha que a durac ao da amostragem e desprezvel em relac ao ao perodo de amostragem T.
Nesse caso, o amostrador pode ser aproximado por um amostrador ideal, que e aquele que
abre/fecha instantaneamente a cada T segundos. Nessas circunst ancias, o trem de pulsos p(t)
e substitudo por um trem de impulsos
!
T
(t) =
$
%
k=$
!(t kT) (19)
Se f (t) e contnua, ent ao
f (kT) =
$
$
f (t)!(t kT)dt (20)
A Fig. 9 ilustra a amostragem feita por um trem de impulsos.
t
t
t
f (t)
f
(t)
T
!
T
(t)
Area = f (kT)
Figura 9: Amostragem por trem de impulsos.
Teorema 1 - Teorema da Amostragem
Uma func ao contnua f (t) com transformada de Fourier F(#), tal que F(#) = 0 para
| # | #
m
, e unicamente determinada por seus valores em intervalos uniformes de tempo T
tais que
T
1
2 f
m
; f
m
=
#
m
2"
(21)
Esboco da prova:
Seja F(#) a transformada de Fourier de f (t) tal que F(#) = 0, para | # |#
m
A func ao f (t) e amostrada a cada T segundos, usando-se o trem de impulsos !
T
(t) dado
por (19). Seja #
s
= 2"/T. A transformada de Fourier de !
T
(t) e dada por
F [!
T
(t)] = #
s
!#
s
(#) (22)
t
f (t)
F(#)
#
#
m
#
m
Figura 10: Func ao f (t) e seu espectro F(#).
onde
!#
s
(#) =
$
%
n=$
!(#n#
s
) (23)
Note que !#
s
e um trem de impulsos (em freq u encia) com perodo #
s
(veja Fig. 11).
#
!#
s
(#)
2#
s #
s
0 #
s
2#
s
Figura 11: Trem de impulsos com perodo #
s
.
Seja f
(t) a func ao f (t) amostrada a cada T segundos. Ent ao,
f
(t) = f (t)!
T
(t) (24)
Pela propriedade 2 da convoluc ao (12), tem-se
f
(t)
1
2"
[F(#) #
s
!#
s
(#)] = F
s
(#) (25)
Desenvolvendo,
F
s
(#) =
1
T
_
F(#)
$
%
n=$
!(#n#
s
)
_
=
1
T
$
%
n=$
F(#) !(#n#
s
) (26)
e portanto
F
s
(#) =
1
T
$
%
n=$
F(#n#
s
) (27)
A Fig. 12 mostra f
(t) e sua transformada de Fourier F
s
(#).
Note que a func ao F(#) se repete periodicamente a cada #
s
rad/s, e que a repetic ao se d a
sem sobreposic ao se
#
s
2#
m
ou seja, T
1
2 f
m
(28)
Portanto, se a func ao f (t) e amostrada com perodo T 1/2 f
m
, o espectro F(#) pode ser
recuperado a partir de F
s
(#), usando-se um ltro passa-baixa, como indicado na Fig. 12.
t
f
(t)
#
m
#
m
#
s
= 2"/T
F
s
(#)
Filtro Passa-baixa
#
Figura 12: Func ao f (t) e sua transformada.
6 Sinais de Banda Ilimitada
Sinais de banda limitada n ao existem na pr atica. Pode-se mostrar que se F(#) = 0 para
| j# | #
m
, ent ao a transformada inversa f (t) existe para todos os intantes de tempo t nega-
tivos, concluindo-se da que um sinal de banda limitada existe no intervalo ($, +$). Recip-
rocamente, um sinal f (t) que s o existe para t 0 n ao pode ter banda limitada.
Portanto, uma superposic ao de espectros sempre existe, mas para todos os sinais de
import ancia pr atica, | F(#) | diminui com o aumento da freq u encia # e a maior parte da
informac ao est a contida num certo intervalo de freq u encias. O erro ao se ignorar freq u encias
acima de um certo valor e desprezvel.
Considere um sinal qualquer, de banda ilimitada (ou seja, n ao existe #
m
tal que F(#) = 0
para | # | #
m
). Suponha que o sinal f (t) seja amostrado com uma freq u encia #
s
= 2#
0
,
onde #
0
e uma freq u encia tal que | F(#) | e desprezvel para | j# | #
0
. A Fig. 13 mostra o
espectro F(#) e o espectro do sinal amostrado F
s
(#).
Note que a superposic ao de espectros ocorre de fato. Recuperando-se o sinal f (t) atrav es
de um ltro passa-baixa, freq u encias que estavam originalmente fora da banda limitada por
#
0
aparecem na sada do ltro, contribuindo em freq u encias mais baixas. Por exemplo, a
componente de freq u encia #
0
+( aparece como uma componente de freq u encia #
0
(. Essa
situac ao n ao e desej avel, e para se evitar esse efeito, e comumfazer primeiro uma pr e-ltragem
de F(#), para se eliminar as contribuic oes nas freq u encias # tais que | j# |> #
0
, e somente
ent ao se realizar a amostragem.
7 Filtragem
O objetivo aqui e determinar a func ao de transfer encia de um ltro ideal com freq u encia de
corte #
m
, como indicado na Fig. 12. A Fig. 14 a seguir mostra a representac ao simb olica do
ltro, o sinal amostrado na entrada f
(t), a sada c(t) e suas respectivas transformadas.
Em geral, um sinal transmitido atrav es de um ltro sofre um atraso no tempo. Diz-se que
o sinal obtido na sada do ltro n ao apresenta distorc ao se c(t) = f (t t
0
), ou seja, obt em-se
F(#)
0
0
#
0
#
0
#
0
#
0
#
0
(
#
0
(
#
0
+(
#
0
+(
F
s
(#)
#
#
Figura 13: Espectro F(#) e F
s
(#).
F
s
(#)
f
(t)
Filtro passa-baixa H(#)
c(t)
C(#)
Figura 14: Representac ao simb olica do ltro.
o pr oprio sinal f (t) com um atraso de t
0
. Como
C(#) = H(#)F
s
(#) (29)
ent ao fazendo
H(#) = | H(#) | exp[ j&(#)] , &(#) =#t
0
(30)
com
| H(#) | =
_
_
_
1 , | # | #
m
0 , caso contr ario
(31)
obt em-se
C(#) = F
s
(#)exp(j#t
0
) (32)
A func ao de transfer encia H(#) = | H(#) | exp[ j&(#)] e mostrada na Fig. 15.
Seja h(t) a resposta ao impulso do ltro passa-baixa H(#) da Fig. 15.
Pode-se mostrar que
h(t) =
#
m
"
_
sin[#(t t
0
)]
#(t t
0
)
_
(33)
| H(#) |
&(#) =#t
0
#
#
m
#
m
0
1
Figura 15: Func ao de transfer encia do ltro.
H(#)
impulso
h(t)
Figura 16: Resposta ao impulso do ltro.
-20 -15 -10 -5 0 5 10 15 20
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
h
(
t
)
Figura 17: Resposta ao impulso do ltro (t
0
= 5).
Note que h(t) existe para valores negativos de t, um resultado bastante estranho levando-
se em conta que o impulso foi aplicado no instante t = 0. Na pr atica, um ltro com as car-
actersticas dadas por (31) n ao pode ser construdo. Constr oem-se ltros com caractersticas
aproximadas das do ltro ideal. A seguir, dois tipos de ltro s ao apresentados.
7.1 Segurador de Ordem Zero
Esse tipo de ltro e muito usado em sistemas controlados por computador.
Considere a seq u encia de n umeros { f (kT)}, k = 0, 1, 2, . . ., correspondente ao sinal f (t)
amostrado a cada T segundos. Deseja-se reconstruir f (t), t 0, a partir das amostras disponveis
at e o instante t. Ou seja, o sinal f (t) entre duas amostras consecutivas nos instantes kT e
(k +1)T deve ser estimado usando-se f (kT), f ((k 1)T), . . . , f (0).
Supondo que f (t) possui derivadas at e ordem n, pode-se estimar f (t) no intervalo kT
t < (k +1)T atrav es da s erie de Taylor
f
k
(t) f (kT) + f
(1)
(kT)(t kT) + +
f
(n)
(kT)
n!
(t kT)
n
(34)
onde
f
(n)
(kT) =
d
n
dt
n
f (t)
t=kT
(35)
Um valor aproximado para a primeira derivada de f (t) e dado por
f
(1)
(kT) =
1
T
{ f (kT) f [(k 1)T]} (36)
e, analogamente, para a segunda derivada de f (t)
f
(2)
(kT) =
1
T
2
{ f (kT) 2 f [(k 1)T] + f [(k 2)T]} (37)
Analisando-se somente o primeiro termo da s erie (34), conclui-se que o polin omio que
extrapola o valor de f (t) no intervalo kT t < (k +1)T e de ordem zero. O dispositivo que
mant em o sinal constante no intervalo de durac ao T, ou seja,
f
k
(t) = f (kT) , kT t (k +1)T (38)
e chamado de segurador de ordem zero. A relac ao (38) dene a resposta ao impulso do
segurador de ordem zero, que e mostrada na Fig. 18.
t
0
1
T
h(t)
Figura 18: Resposta ao impulso do segurador de ordem zero.
A Fig. 19 mostra sinais tpicos de entrada e sada do segurador de ordem zero.
t
t
f
(t)
T
T
2T
2T
3T
3T
4T
4T
5T
5T
6T
6T
7T
7T
8T
8T
c(t)
Figura 19: Sinais de entrada e sada do segurador de ordem zero.
Ainda na Fig. 18, segue-se que a resposta ao impulso do segurador de ordem zero e dada
por
h(t) = u(t) u(t T) (39)
onde u(t) e a func ao degrau unit ario. A func ao de transfer encia do segurador de ordem zero e
dada pela transformada de Fourier de h(t), ou seja,
H(#) =
1exp(j#T)
j#
= exp(j#T/2)
_
exp( j#T/2) exp(j#T/2)
j#
_
=
T sin(#T/2)
(#T/2)
exp(j#T/2) (40)
Mas T = 2"/#
s
, onde #
s
e a freq u encia de amostragem em rad/s. Ent ao,
H(#) =
2"
#
s
_
sin("#/#
s
)
("#/#
s
)
_
exp(j"#/#
s
) (41)
As caractersticas de amplitude e fase do segurador de ordem zero s ao mostradas na
Fig. 20.
Note que o segurador de ordem zero comporta-se essencialmente como um ltro passa-
baixa. Comparado com um ltro ideal, ao inv es de cortar bruscamente em #
s
/2, o ganho e
zero em # = #
s
e | G(#) |= 0.636 para # = #
s
/2. A precis ao do segurador de ordem zero
como dispositivo extrapolador depende bastante da freq u encia de amostragem, como pode ser
visualizado na Fig. 19.
7.2 Filtro Passa-Baixa de 2a. Ordem
Considere o ltro passa-baixa mostrado na Fig. 21.
0
0
#
#
| H(#) |
&(#)
#
s
/2 #
s
2#
s
3#
s
"
2"
Filtro passa-baixa ideal
Figura 20: Amplitude e fase do segurador de ordem zero.
+
+
V
i
V
o
C
L
R
Figura 21: Filtro de segunda ordem RLC.
A func ao de transfer encia do ltro e dada por
H(#) =
V
o
( j#)
V
i
( j#)
=
1
( j#)
2
LC+ j#L/R+1
=
1/LC
#
2
+ j#/RC+1/LC
(42)
Do denominador de (42), colocado na forma padr ao para um sistema de segunda ordem,
vem
#
n
=
1
LC
, + =
1
2R
_
L/C (43)
Fazendo R =
_
L/C, obt em-se
+ = 1/2 ;
H(#)
#=#
n
= 1 (44)
e
H(#) =
#
2
n
#
2
+ j##
n
+#
2
n
(45)
A transformada inversa de H(#), que e a resposta ao impulso do ltro, e dada por
h(t) =
2
3
3
#
n
exp(#
n
t/2)sin(
3
2
#
n
t) (46)
As Figs. 22 (a) e (b) mostram as caractersticas de amplitude e de fase de H(#), e a Fig. 23
mostra as respostas impulsivas h(t).
!20 !15 !10 !5 0 5 10 15 20
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Frequencia [rad/s]
A
m
p
l
i
t
u
d
e
!20 !15 !10 !5 0 5 10 15 20
!3
!2
!1
0
1
2
3
Frequencia [rad/s]
F
a
s
e
[
r
a
d
]
(a) #
n
= 3
!20 !15 !10 !5 0 5 10 15 20
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Frequencia [rad/s]
A
m
p
l
i
t
u
d
e
!20 !15 !10 !5 0 5 10 15 20
!3
!2
!1
0
1
2
3
Frequencia [rad/s]
F
a
s
e
[
r
a
d
]
(b) #
n
= 6
Figura 22: Caractersticas de Resposta em Frequ encia do Filtro RLC.
0 0.5 1 1.5 2 2.5 3
!1
!0.5
0
0.5
1
1.5
2
2.5
3
3.5
Resposta ao Impulso
Tempo (sec)
A
m
p
l
i
t
u
d
e
#n = 3
#n = 6
Figura 23: Resposta ao Impulso dos Filtros RLC.
Note que a resposta ao impulso e semelhante ` a resposta ao impulso do ltro ideal, por em
inicia-se em t = 0.
8 Experimentos
O objetivo desta exper encia e ilustrar a validade do teorema da amostragem procedendo-se
a ltragem de um sinal amostrado atrav es de um sistema mec anico cuja din amica e ajustada
para aproxim a-lo de um ltro ideal.
Conforme visto na experi encia anterior, um sistema de 2
a
ordem com+ =1/2 se comporta
aproximadamente como um ltro passa-baixas com frequ encia de corte igual ` a frequ encia
natural do sistema #
n
. Cada um dos sistemas mec anicos ECP pode ser congurado desta
maneira, com a ajuda de controladores do tipo PD, e ser utilizado como ltro passa-baixas
(FPB).
A id eia central desta experi encia pode ser resumida como segue. Inicialmente gera-se
um sinal com composic ao espectral limitada em frequ encia
1
. O sinal e ent ao amostrado com
uma certa taxa de amostragem e armazenado num arquivo com extens ao .trj o qual pode
ser utilizado como sinal de refer encia para os sistemas ECP (atrav es da opc ao user dened
no menu trajectory). Finalmente uma ltragem ser a realizada pelos sistemas mec anicos
ECP congurados como sistemas de segunda ordem, visando recuperar o sinal original. Duas
quest oes relativas a este problema surgem.
E possvel recuperar o sinal original a partir das
amostras? Se sim, como? O teorema da amostragem estabelece condic oes para que este tipo
de sinal possa ser amostrado sem que haja perda de informac ao. De acordo com os resulta-
dos te oricos apresentados na experi encia anterior, isto ocorrer a somente se duas condic oes se
vericarem:
1
Sabe-se que um sinal limitado no tempo e necessariamente ilimitado no domnio da frequ encia. Contudo e
possvel que o espectro deste sinal seja aproximadamente limitado (isto e, desprezvel para frequ encias acima de
um certo valor) e que seu limite superior seja conhecido.
O sinal original for amostrado numa frequ encia f
s
superior ao dobro do limitante supe-
rior de seu conte udo espectral f
0
, ou seja, f
s
> 2 f
0
;
Osinal amostrado for ltrado por umFPB(realizado por umsistema ECP) cuja frequ encia
de corte f
n
seja delimitada por: f
0
< f
n
< f
s
f
0
.
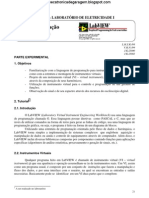
Um exemplo de sinal amostrado e adequadamente recuperado por um FPB de 2
a
ordem
e dado pelo exerccio de simulac ao B-1-a proposto na experi encia 9. A Fig. 24 apresenta o
espectro do sinal amostrado e a resposta do ltro para aquele exerccio.
!40 !30 !20 !10 0 10 20 30 40
0
0.2
0.4
0.6
0.8
1
1.2
1.4
freq.(rad/s)
a
m
p
l
i
t
u
d
e
Resposta do FPB
Espectro do Sinal
Amostrado
Figura 24: Espectro de um sinal amostrado e a resposta de um FPB de segunda ordem.
Em resumo, a presente experi encia consistir a em utilizar o sinal amostrado (armazenado
no arquivo .trj) como refer encia para algum sistema ECP congurado como FPB. Deseja-se
obter na sada um sinal aproximadamente igual ao sinal original (antes de ser amostrado). Um
sinal tpico utilizado como refer encia nesta experi encia e dado pela Fig. 25.
Os sinais utilizados tem a forma geral x(t) = Ke
't
cos(#
d
t) e s ao amostrados com uma
frequ encia conhecida #
s
. O formato .trj e descrito a seguir. A primeira linha deve conter
o n umero correspondente ao n umero de linhas do arquivo. Cada linha seguinte deve conter
um n umero correspondente a um valor da func ao desejada. Ao selecionar a opc ao trajec-
tory seguida de user dened no software ECP-Executive o usu ario deve denir um valor
segment time (expresso em milissegundos) que corresponde ao tempo em que cada valor
denido no arquivo ser a mantido.
Nas sec oes seguintes ser a mostrado como cada dispositivo ECP pode ser congurado
como um sistema de segunda ordem, com func ao de transfer encia aproximadamente igual a
de um ltro passa-baixas.
8.1 Sistema Retilneo
Considere o sistema retilneo congurado como sistema de segunda ordem, isto e, com apenas
um carro ligado ao segundo carro por uma mola e com o segundo carro imobilizado, conforme
0 100 200 300 400 500 600 700 800 900 1000
!0.8
!0.6
!0.4
!0.2
0
0.2
0.4
0.6
0.8
1
tempo(ms)
a
m
p
l
i
t
u
d
e
Figura 25: Sinal amostrado armazenado em arquivo .trj.
a Fig. 26.
x1
Figura 26: Diagrama do sistema retilneo com o carro 2 travado.
A func ao de transfer encia deste sistema e dada por:
F(s) =
k
hw
m
1
s
2
+c
1
s +k
1
(47)
onde:
m
1
: e a massa do carro;
c
1
: e o coeciente de atrito viscoso do carro;
k
1
: e a constante da mola;
k
hw
: e o ganho de hardware do sistema.
Considere agora, o sistema anterior controlado por um controlador PD com velocity
feedback com o par ametro k
i
= 0, conforme a Fig. 30 e F(s) descrito pela equac ao (47).
A func ao de transfer encia do sistema em malha fechada e dada por:
r x
K
d
s
k
hw F(s)
K
p
Controlador
Planta
+ +
Figura 27: Diagrama de blocos do sistema com controlador PD com velocity feedback.
X(s)
R(s)
=
k
hw
k
p
m
1
s
2
+(c
1
+k
hw
k
d
)s +(k
1
+k
hw
k
p
)
(48)
Para que este sistema se comporte aproximadamente como um ltro de segunda ordem,
deve-se calcular os par ametros k
p
e k
d
de modo que o coeciente de amortecimento seja 1/2
e que a frequ encia natural de oscilac ao seja igual ` a frequ encia de corte desejada para o ltro.
Para que isto aconteca deve-se fazer:
k
p
=
m
1
#
2
n
k
1
k
hw
(49)
e
k
d
=
m
1
#
n
c
1
k
hw
(50)
8.1.1 Procedimento Experimental para o Sistema Retilneo
Deseja-se analisar o comportamento do sistema retilneo quando excitado por sinais amostra-
dos com freq u encia de amostragem distintas
1. Com o controlador desligado, trave o segundo carro utilizando uma chave apropriada
(Fig. 26). Conecte o primeiro e o segundo carro utilizando uma mola de dureza fraca .
Importante: n ao trave o segundo carro utilizando diretamente os conectores nos ba-
tentes. Utilize as porcas disponveis para trav a-lo;
2. Fixe quatro massas de 500g sobre o primeiro carro;
3. Para os valores de #
n
= 7 e 30 rd/s, calcule os ganhos k
p
e k
d
do controlador PD with
Velocity Feedback, de acordo com as equac oes (49) e (50) respectivamente. Adote os
seguinte valores:
k
hw
= 14732, m
1
= 2.778kg (com pesos), c
1
= 3.9189N-s/m, k
1
= 175N/m
Importante: Os valores dos ganhos k
p
e k
d
devem ser menores do que 0,1 e 0,04
respectivamente.
4. Com o controlador ligado, entre na caixa de di alogo Control Algorithm do menu Set-
up e dena Ts=0.00442s para Continuous Time. No menu Set-up, selecione PI with
Velocity Feedback e entre com os valores k
p
e k
d
calculados no passo anterior (k
i
= 0).
Selecione Implement Algorithm e OK.
5. Entre no menu Command, v a para Trajectory e selecione User Dened. Realize os
seguintes ajustes:
(a) Selecione Close Loop Trajectory,
(b) Selecione Segment Time: 10 (msec),
(c) Selecione Trajetory Filename: c:/ea619/apostilas/exp6/fun1 ret w7 ws 64.trj
Onde o sinal f
1
e o sinal amostrado:
f (t) = cte exp(0,01t) sen(7t), freq u encia de amostragem #
s
= 64 rd/s
(d) N ao habilite a opc ao interpolac ao por spline.
6. V a para o Set-up Data Acquisition no menu Data e selecione Encoder #1 e Com-
manded Position como vari aveis para aquisic ao; especique uma amostragem a cada 2
ciclos. Selecione OK para sair. Selecione Zero Position no menu Utility para zerar as
posic oes dos encoders;
7. Selecione Execute no menu Command. No comando Set up Plot selecione Com-
mand Position no eixo da direita e Encoder 1 Position no eixo esquerdo. Verique a
qualidade do sinal recuperado na sada do sistema ECP.
8. Repita o experimento utilizando agora o sinal no arquivo:
c:/ea619/apostilas/exp6/fun2 ret w7 ws 16.trj
Onde o sinal f
2
e o sinal amostrado:
f (t) = cte exp(0,01t) sen(7t), freq u encia de amostragem #
s
= 16 rd/s
Verique a qualidade do sinal recuperado na sada do sistema ECP. Se necess ario refaca
o c alculo dos par ametros do controlador PD.
8.2 Sistema Torcional
A utilizac ao do sistema torcional congurado como sistema de segunda ordem e muito semel-
hante ao caso anterior. Retire os discos 2 e 3.
A func ao de transfer encia deste sistema e dada por:
F(s) =
k
hw
J
1
s
2
+c
1
s
(51)
onde:
J
1
: e o momento de in ercia do disco 1;
c
1
: e o coeciente de atrito viscoso do disco 1;
r x
K
d
s
k
hw F(s)
K
p
Controlador
Planta
+ +
Figura 28: Diagrama de blocos do sistema com controlador PD com velocity feedback.
k
hw
: e o ganho de hardware do sistema.
Considere agora, o sistema anterior controlado por um controlador PD com velocity
feedback com o par ametro k
i
= 0, conforme a Fig. 28 e F(s) dado pela equac ao (51).
A func ao de transfer encia do sistema em malha fechada e dada por:
,(s)
R(s)
=
k
hw
k
p
J
1
s
2
+(c
1
+k
hw
k
d
)s +k
hw
k
p
(52)
Para que este sistema se comporte aproximadamente como um ltro de segunda ordem,
deve-se calcular os par ametros k
p
e k
d
de modo que o coeciente de amortecimento seja
1
2
e
que a frequ encia natural de oscilac ao seja igual ` a frequ encia de corte desejada para o ltro.
Para que isto aconteca deve-se fazer:
k
p
=
J
1
#
2
n
k
hw
(53)
e
k
d
=
J
1
#
n
c
1
k
hw
(54)
8.2.1 Procedimento Experimental para o Sistema Torcional
Deseja-se analisar o comportamento do sistema torcional quando excitado por sinais amostra-
dos com freq u encia de amostragem distintas
1. Fixe quatro massas de 500g sobre o disco inferior na dist ancia de 9 cm;
2. Para os valores de #
n
= 5 e 30 rd/s, calcule os ganhos k
p
e k
d
do controlador PD with
Velocity Feedback, de acordo com as equac oes (53) e (54) respectivamente. Adote os
seguinte valores:
c
1
= 0.0076394N-s/m, J
1
= 0.0187 N/m (com pesos) e k
hw
= 17.6
Importante: Os valores dos ganhos k
p
e k
d
devem ser menores do que 0.2.
3. Com o controlador ligado, entre na caixa de di alogo Control Algorithm do menu Set-
up e dena Ts=0.00442s para Continuous Time. No menu Set-up, selecione PI with
Velocity Feedback e entre com os valores k
p
e k
d
calculados no passo anterior (k
i
= 0).
Selecione Implement Algorithm e OK.
4. Entre no menu Command, v a para Trajectory e selecione User Dened. Realize os
seguintes ajustes:
(a) Selecione Close Loop Trajectory,
(b) Selecione Segment Time: 10 (msec),
(c) Selecione Trajetory Filename: c:/ea619/apostilas/exp6/fun1 tor w7 ws 64.trj
Onde o sinal f
1
e o sinal amostrado:
f (t) = cte exp(0,01t) sen(7t), freq u encia de amostragem #
s
= 64 rd/s
(d) N ao habilite a opc ao interpolac ao por spline.
5. V a para o Set-up Data Acquisition no menu Data e selecione Encoder #1 e Com-
manded Position como vari aveis para aquisic ao; especique uma amostragem a cada 2
ciclos. Selecione OK para sair. Selecione Zero Position no menu Utility para zerar as
posic oes dos encoders;
6. Selecione Execute no menu Command. No comando Set up Plot selecione Com-
mand Position no eixo da direita e Encoder 1 Position no eixo esquerdo. Verique a
qualidade do sinal recuperado na sada do sistema ECP.
7. Repita o experimento utilizando agora o sinal no arquivo:
c:/ea619/apostilas/exp6/fun2 tor w7 ws 64.trj
Onde o sinal f
2
e o sinal amostrado:
f (t) = cte exp(0,01t) sen(7t), freq u encia de amostragem #
s
= 8 rd/s
Verique a qualidade do sinal recuperado na sada do sistema ECP. Se necess ario refaca
o c alculo dos par ametros do controlador PD.
8.3 Emulador Industrial
Uma particularidade deste sistema e que o momento de in ercia total do sistema e composto
pelo momento de in ercia do disco de atuac ao somado ao momento de in ercia reetido do disco
de carga.
A func ao de transfer encia deste sistema e na congurac ao a ser utilizada e dada por:
F(s) =
k
hw
J
s
2
+c
s
(55)
onde:
J
: e o momento de in ercia total reetido sobre o eixo do motor;
c
: e o coeciente de atrito viscoso;
r x
K
d
s
k
hw F(s)
K
p
Controlador
Planta
+ +
Figura 29: Diagrama de blocos do sistema com controlador PD com velocity feedback.
k
hw
: e o ganho de hardware do sistema.
Considere agora, o sistema anterior controlado por um controlador PD com velocity
feedback com o par ametro k
i
= 0, conforme a Fig. 29 com F(s) dado pela equac ao (55).
A func ao de transfer encia do sistema em malha fechada e dada por:
,(s)
R(s)
=
k
hw
k
p
J
s
2
+(c
+k
hw
k
d
)s +(k
hw
k
p
)
(56)
Para que este sistema se comporte aproximadamente como um ltro de segunda ordem,
deve-se calcular os par ametros k
p
e k
d
de modo que o coeciente de amortecimento seja
1
2
e
que a frequ encia natural de oscilac ao seja igual ` a frequ encia de corte desejada para o ltro.
Para que isto aconteca deve-se fazer:
k
p
=
J
#
2
n
k
hw
(57)
e
k
d
=
J
#
n
c
k
hw
(58)
8.3.1 Procedimento Experimental para o Emulador Industrial
Deseja-se analisar o comportamento do sistema emulador industrial quando excitado por
sinais amostrados com freq u encia de amostragem distintas.
1. Com o controlador desligado, desconecte o disco 2, e deixe o disco 1 sem carga.
2. Para os valores de #
n
= 5 e 30 rd/s, calcule os ganhos k
p
e k
d
do controlador PD with
Velocity Feedback, de acordo com as equac oes (57) e (58) respectivamente. Adote os
seguinte valores:
J
= 410
4
N/m, k
hw
= 5,77 e c
= 3,310
4
N-s/m
Importante: Os valores dos ganhos k
p
e k
d
devem ser menores do que 0.2 e 0.05
respectivamente.
3. Com o controlador ligado, entre na caixa de di alogo Control Algorithm do menu Set-
up e dena Ts=0.001768s para Continuous Time. No menu Set-up, selecione PI with
Velocity Feedback e entre com os valores k
p
e k
d
calculados no passo anterior (k
i
= 0).
Selecione Encoder #2 e OK. Selecione Implement Algorithm e OK.
4. Entre no menu Command, v a para Trajectory e selecione User Dened. Realize os
seguintes ajustes:
(a) Selecione Close Loop Trajectory,
(b) Selecione Segment Time: 10 (msec),
(c) Selecione Trajetory Filename: c:/ea619/apostilas/exp6/fun1 emu w7 ws 64 alpha 001.trj
Onde o sinal f
1
e o sinal amostrado:
f (t) = cte exp(0,01t) sen(7t), freq u encia de amostragem #
s
= 64 rd/s
(d) N ao habilite a opc ao interpolac ao por spline.
5. V a para o Set-up Data Acquisition no menu Data e selecione Encoder #2 e Com-
manded Position como vari aveis para aquisic ao; especique uma amostragem a cada 6
ciclos. Selecione OK para sair. Selecione Zero Position no menu Utility para zerar as
posic oes dos encoders;
6. Selecione Execute no menu Command. No comando Set up Plot selecione Com-
mand Position no eixo da direita e Encoder 2 Position no eixo esquerdo. Verique a
qualidade do sinal recuperado na sada do sistema ECP.
7. Repita o experimento utilizando agora o sinal no arquivo:
c:/ea619/apostilas/exp6/fun2 emu w7 ws 16 alpha 001.trj
Onde o sinal f
2
e o sinal amostrado:
f (t) = cte exp(0,01t) sen(7t), freq u encia de amostragem #
s
= 16 rd/s
Verique a qualidade do sinal recuperado na sada do sistema ECP. Se necess ario refaca
o c alculo dos par ametros do controlador PD.
8.4 P endulo Invertido
Considere o p endulo invertido com a haste principal travada; a func ao de transfer encia deste
sistema e dada por:
F(s) =
k
hw
m
1
s
2
+c
1
s
(59)
onde:
m
1
: e a massa da haste deslizante com os pesos orelha;
c
1
: e o coeciente de atrito viscoso da haste deslizante;
k
hw
: e o ganho de hardware do sistema, denido pelo produto k
s
k
f
k
x
;
Considere agora, o sistema anterior controlado por um controlador PD com velocity
feedback com o par ametro k
i
= 0, conforme a Fig. 30 e F(s) descrito pela equac ao (59).
r x
K
d
s
k
hw F(s)
K
p
Controlador
Planta
+ +
Figura 30: Diagrama de blocos do sistema com controlador PD com velocity feedback.
A func ao de transfer encia do sistema em malha fechada e dada por:
X(s)
R(s)
=
k
hw
k
p
m
1
s
2
+(c
1
+k
hw
k
d
)s +k
hw
k
p
(60)
Para que este sistema se comporte aproximadamente como um ltro de segunda ordem,
deve-se calcular os par ametros k
p
e k
d
de modo que o coeciente de amortecimento seja 1/2
e que a frequ encia natural de oscilac ao seja igual ` a frequ encia de corte desejada para o ltro.
Para que isto aconteca deve-se fazer:
k
p
=
m
1
#
2
n
k
hw
(61)
e
k
d
=
m
1
#
n
c
1
k
hw
(62)
8.4.1 Procedimento Experimental para o P endulo
Deseja-se analisar o comportamento da haste deslizante quando excitada por sinais amostrados
com freq u encia de amostragem distintas.
1. Desligue o controlador xe os pesos orelhasna haste deslizante. Trave a haste prin-
cipal do p endulo utilizando um calco no contrapeso. A haste deslizante deve estar na
posic ao central.
2. Para os valores de #
n
= 10 e 65 rd/s, calcule os ganhos k
p
e k
d
do controlador PD with
Velocity Feedback, de acordo com as equac oes (61) e (62) respectivamente. Adote os
seguinte valores:
m
1
= 0.216kg, c
1
= 0.225 N-s/m, e k
hw
= 2088
Importante: Os valores dos ganhos k
p
e k
d
devem ser menores do que 0,4 e 0,04
respectivamente.
3. Com o controlador ligado, entre na caixa de di alogo Control Algorithm do menu Set-
up e dena Ts=0.00442s para Continuous Time. No menu Set-up, selecione PI with
Velocity Feedback e entre com os valores k
p
e k
d
calculados no passo anterior (k
i
= 0).
Selecione Encoder #2 e OK. Selecione Implement Algorithm e OK.
4. Entre no menu Command, v a para Trajectory e selecione User Dened. Realize os
seguintes ajustes:
(a) Selecione Close Loop Trajectory,
(b) Selecione Segment Time: 10 (msec),
(c) Selecione Trajetory Filename: C:/ea619/apostilas/fun w 8 alpha 01 ws 65.trj
Onde o sinal f
1
e o sinal amostrado:
f (t) = cte exp(0,01t)sin(8t), freq u encia de amostragem #
s
= 65 rd/s
(d) N ao habilite a opc ao interpolac ao por spline.
5. V a para o Set-up Data Acquisition no menu Data e selecione Encoder #2 como
vari avel para aquisic ao; especique uma amostragem a cada 2 ciclos. Selecione OK
para sair. Selecione Zero Position no menu Utility para zerar as posic oes dos encoders;
6. Selecione Execute no menu Command. No comando Set up Plot selecione Com-
mand Position no eixo da direita e Encoder 2 Position no eixo esquerdo. Verique a
qualidade do sinal recuperado na sada do sistema ECP.
7. Repita o experimento utilizando agora o sinal no arquivo:
C:/ea619/apostilas/fun w 8 alpha 01 ws 16.trj
Onde o sinal f
2
e o sinal amostrado:
f (t) = cte exp(0,01t)sin(8t), freq u encia de amostragem #
s
= 16 rd/s
Verique a qualidade do sinal recuperado na sada do sistema ECP. Se necess ario refaca
o c alculo dos par ametros do controlador PD.
8.5 Levitador Magn etico
Considere o levitador magn etico somente com o disco #1. A func ao de transfer encia deste
sistema e dada por:
F(s) =
k
hw
m
1
s
2
+c
1
s
(63)
onde:
m
1
: e a massa do disco magn etico;
c
1
: e o coeciente de atrito viscoso;
k
hw
: e o ganho de hardware do sistema.
Considere agora, o sistema anterior controlado por um controlador PD com velocity
feedback com o par ametro k
i
= 0, conforme a Fig. 31 e F(s) descrito pela equac ao (63).
r x
K
d
s
k
hw F(s)
K
p
Controlador
Planta
+ +
Figura 31: Diagrama de blocos do sistema com controlador PD com velocity feedback.
A func ao de transfer encia do sistema em malha fechada e dada por:
X(s)
R(s)
=
k
hw
k
p
m
1
s
2
+(c
1
+k
hw
k
d
)s +k
hw
k
p
(64)
Para que este sistema se comporte aproximadamente como um ltro de segunda ordem,
deve-se calcular os par ametros k
p
e k
d
de modo que o coeciente de amortecimento seja 1/2
e que a frequ encia natural de oscilac ao seja igual ` a frequ encia de corte desejada para o ltro.
Para que isto aconteca deve-se fazer:
k
p
=
m
1
#
2
n
k
hw
(65)
e
k
d
=
m
1
#
n
c
1
k
hw
(66)
8.5.1 Procedimento Experimental para o Levitador
Deseja-se analisar o comportamento do disco #1 do levitador quando excitado por sinais
amostrados com freq u encia de amostragem distintas.
1. No menu File carregue os par ametros de calibrac ao do sensor. Atrav es da opc ao Load
Settings carregue o arquivo cal_2007.cfg. Entre no menu Setup, Sensor Calibra-
tion, selecione a opc ao Calibrate Sensor Y
cal
= a/Y
raw
+ f /sqrt(Y
raw
+g+hY
raw
) e
habilite a opc ao Apply Thermal Compesation;
2. Para os valores de #
n
= 18, 25 e 35 rd/s, calcule os ganhos k
p
e k
d
do controlador PD,
de acordo com as equac oes (65) e (66) respectivamente. Adote os seguinte valores:
m
1
= 0.123kg, c
1
= 0.40 N-s/m, e k
hw
= 104.6
Importante: Os valores dos ganhos k
p
e k
d
devem ser menores do que 2 e 0,04 respec-
tivamente.
3. Entre na caixa de di alogo Control Algorithm e dena Ts=0.001768s. Carregue o al-
goritmo exp6.alg atrav es da opc ao Load from disk. Em seguida selecione Edit Algo-
rithm e ajuste os ganhos kp e kd de acordo com os valores calculados no item anterior.
Em seguida selecione Implement Algorithm. O disco ir a se mover para a altura de 2.5
[cm] mantendo-se nesta posic ao;
4. V a para o Setup Data Acquisition no menu Data e selecione Commanded Position
e Variable Q10 como vari aveis a adquirir, e especique uma amostragem de dados a
cada 2 ciclos;
5. Entre no menu Command, v a para Trajectory e selecione User Dened. Realize os
seguintes ajustes:
(a) Selecione Trajetory Filename: c:/ea619/apostilas/exp6/fun1 lev.trj
Onde o sinal f
1
e o sinal amostrado:
f (t) = cte exp(0,1t) sen(20t), freq u encia de amostragem #
s
= 126 rd/s
(b) Selecione Segment Time: 10 (msec),
(c) N ao habilite a opc ao interpolac ao por spline.
6. Selecione Execute no menu Command. No comando Set up Plot selecione Command
Position no eixo da direita e a vari avel Q10 no eixo esquerdo. Verique a qualidade do
sinal recuperado na sada do sistema ECP.
7. Repita o experimento utilizando agora o sinal no arquivo:
c:/ea619/apostilas/exp6/fun2 lev.trj
Onde o sinal f
2
e o sinal amostrado:
f (t) = cte exp(0,1t) sen(20t), freq u encia de amostragem #
s
= 32 rd/s
Verique a qualidade do sinal recuperado na sada do sistema ECP. Se necess ario refaca
o c alculo dos par ametros do controlador PD.
Relat orio
Amostragem Utilizando os Equipamentos ECP
1. Com base nos resultados e guras obtidas, estabeleca quando foi possvel recuperar o
sinal original.
2. Analise a inu encia da freq u encia de amostragem e a freq u encia de corte do ltro no
sinal da sada do sistema.
3. Compare os resultados obtidos com os previstos pela an alise.
Amostragem Usando Matlab
Considere o diagrama a seguir.
y(t)
y
f
(t) y
(t)
#
s
- freq u encia de amostragem
#
n
- freq u encia de corte
Filtro Passa-Baixa
Figura 32: Esquema de Filtragem.
1. Simule a situac ao indicada no diagrama da Fig. 32 para a func ao y(t) = exp(t/10)
sen(3t), nos seguintes casos (unidades em rad/s):
a) #
s
= 25, #
n
= 6.
b) #
s
= 25, #
n
= 3.
c) #
s
= 4, #
n
= 3.
d) #
s
= 4, #
n
= 6.
Para cada caso, obtenha os gr acos de y
(t) e y
f
(t); plote-os simultaneamente com y(t).
2. Com base nas curvas obtidas para cada caso, explique a semelhanca (ou diferenca) entre
o sinal original e os sinais ltrados. Qual a inu encia da freq u encia de amostragem ? E
da freq u encia de corte do ltro ?
3. Simule a situac ao indicada no diagrama quando y(t) e uma onda quadrada de perodo
T = 2, nos seguintes casos (unidades em rad/s):
a) #
s
= 150, #
n
= 12.
b) #
s
= 150, #
n
= 3.
Para cada caso, obtenha os gr acos de y
(t) e y
f
(t); plote-os simultaneamente com y(t).
4.
E possvel recuperar uma onda quadrada ? Por qu e ? Explique os resultados obtidos no
item B-3.
Refer encias
[1] Lathi, B. P., Communication Systems, John Wiley, 1968.
[2] Kuo, B. C. , Digital Control Systems, Holt, Rinehart and Wiston, 1980.
Vous aimerez peut-être aussi
- Rev 03Document285 pagesRev 03William Dos SantosPas encore d'évaluation
- UntitledDocument37 pagesUntitledAnna Gabriele Marques de OliveiraPas encore d'évaluation
- Tratamento de Icterícia NeonatalDocument10 pagesTratamento de Icterícia NeonatalAcbal AchyPas encore d'évaluation
- Lista de Exercicios Energia LivreDocument3 pagesLista de Exercicios Energia Livreclaudio0% (2)
- Optic ADocument6 pagesOptic ApaulaorobertaoPas encore d'évaluation
- Questões AL 1.1Document2 pagesQuestões AL 1.1Diogo AlexandrePas encore d'évaluation
- Evangelhos Apócrifos - (A Sofia de Jesus Cristo)Document9 pagesEvangelhos Apócrifos - (A Sofia de Jesus Cristo)Diego AntunesPas encore d'évaluation
- Brousseau G. SlidesDocument67 pagesBrousseau G. SlidesE_RCARVALHO100% (1)
- 4GL Manual PDFDocument65 pages4GL Manual PDFMaique AlmeidaPas encore d'évaluation
- 6 Argumentos Teistas Contemporâneos PDFDocument15 pages6 Argumentos Teistas Contemporâneos PDFzwinglioPas encore d'évaluation
- Proteção Elétrica Por Aterramento e Por Interruptor DRDocument20 pagesProteção Elétrica Por Aterramento e Por Interruptor DRRui SvenssonPas encore d'évaluation
- Ajuste Do Excesso de Ar Na Queima Do Bagaço de CanaDocument1 pageAjuste Do Excesso de Ar Na Queima Do Bagaço de CanaAnonymous QY7Iu8fBPas encore d'évaluation
- FichasDocument1 pageFichasCatarina FernandesPas encore d'évaluation
- Prova 7 º Ano Matematica Sme RJDocument16 pagesProva 7 º Ano Matematica Sme RJVanessa GomesPas encore d'évaluation
- Mineracao Desmonte e Estabilidade de Rochas PDFDocument79 pagesMineracao Desmonte e Estabilidade de Rochas PDFEliezer GouvêaPas encore d'évaluation
- Componentes Do Tubo de Raios X - Fisica Da RadiologiaDocument16 pagesComponentes Do Tubo de Raios X - Fisica Da RadiologiajacksongalvaoPas encore d'évaluation
- Escala de Vulnerabilidade ... Stresse No Trabalho (Document19 pagesEscala de Vulnerabilidade ... Stresse No Trabalho (Lenisa Veiga100% (1)
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Document1 pageDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroPas encore d'évaluation
- Bioquímica EngAmb T2 Grupo 05 Prova 02Document4 pagesBioquímica EngAmb T2 Grupo 05 Prova 02Lucas SantosPas encore d'évaluation
- Fundamentos Da Higiene OcupacionalDocument32 pagesFundamentos Da Higiene OcupacionaljheimissonPas encore d'évaluation
- Fundamentos Da HarmoniaDocument108 pagesFundamentos Da HarmoniaJoao Roberto Pereira100% (3)
- Atividade de Recuperação Paralela 3 AnoDocument1 pageAtividade de Recuperação Paralela 3 AnofelupealmeidqPas encore d'évaluation
- Aula 2 Eletroquímica (Modo de Compatibilidade)Document43 pagesAula 2 Eletroquímica (Modo de Compatibilidade)Ronan MullerPas encore d'évaluation
- NBR Iec 60079-28Document37 pagesNBR Iec 60079-28Lugo EngenhariaPas encore d'évaluation
- Proxmox Ceph PT BRDocument6 pagesProxmox Ceph PT BRHalbe Bruno de AraújoPas encore d'évaluation
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDocument69 pagesEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROPas encore d'évaluation
- 2 Lista de Exercícios de Química Do 3o Ano (2013)Document6 pages2 Lista de Exercícios de Química Do 3o Ano (2013)Valério LondePas encore d'évaluation
- Aula 7 - Geometria 1Document26 pagesAula 7 - Geometria 1Assad TubagiPas encore d'évaluation
- De Stijl ManifestoDocument2 pagesDe Stijl ManifestoRogeri O LiveiraPas encore d'évaluation
- Instrumentação Virtual Com LabviewDocument20 pagesInstrumentação Virtual Com Labviewneto_e_khelenPas encore d'évaluation