Vous aimerez peut-être aussi
- Assignment1Document2 pagesAssignment1Manoj KumarPas encore d'évaluation
- Chapter 03Document45 pagesChapter 03Anonymous ZyDssAc7Rc100% (1)
- Solutions To Chapter 11 Problems: Problem 11.1Document69 pagesSolutions To Chapter 11 Problems: Problem 11.1Anonymous ZyDssAc7RcPas encore d'évaluation
- 1 LMI's and The LMI ToolboxDocument4 pages1 LMI's and The LMI Toolboxkhbv0% (1)
- Solving Dynamics Problems in MathcadDocument9 pagesSolving Dynamics Problems in MathcadMario Jucharo LaymePas encore d'évaluation
- QUBE-Servo Inverted Pendulum ModelingDocument4 pagesQUBE-Servo Inverted Pendulum ModelingByron Xavier Lima CedilloPas encore d'évaluation
- Buried Steam Pipe Heat TransferDocument313 pagesBuried Steam Pipe Heat TransfersandwichnachosPas encore d'évaluation
- Wheeled Inverted Pendulum EquationsDocument10 pagesWheeled Inverted Pendulum EquationsMunzir ZafarPas encore d'évaluation
- Measuring The Coefficient of Restitution of A Table Tennis BallDocument8 pagesMeasuring The Coefficient of Restitution of A Table Tennis BallEd Moss100% (1)
- PsoDocument17 pagesPsoKanishka SahniPas encore d'évaluation
- DESIGN OF MACHINERY - Problem 4-18gDocument2 pagesDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraPas encore d'évaluation
- Regression and CorrelationDocument4 pagesRegression and CorrelationClark ConstantinoPas encore d'évaluation
- Mark Scheme Practice Mechanics 1110Document26 pagesMark Scheme Practice Mechanics 1110XhanAfaqPas encore d'évaluation
- Chapter 3 SolutionsDocument45 pagesChapter 3 SolutionsKavya SelvarajPas encore d'évaluation
- Newton Gauss MethodDocument37 pagesNewton Gauss MethodLucas WeaverPas encore d'évaluation
- Problems Chaptr 1 PDFDocument4 pagesProblems Chaptr 1 PDFcaught inPas encore d'évaluation
- Mass, Stiffness, and Damping Matrix Estimates From Structural MeasurementsDocument7 pagesMass, Stiffness, and Damping Matrix Estimates From Structural Measurementscarlos0094Pas encore d'évaluation
- Initial Value ThoermDocument61 pagesInitial Value ThoermTushar DagaPas encore d'évaluation
- Numerical Analysis SolutionDocument19 pagesNumerical Analysis SolutionPradip AdhikariPas encore d'évaluation
- Describing Functions For Effective StiffnessDocument11 pagesDescribing Functions For Effective Stiffnessryan rakhmat setiadiPas encore d'évaluation
- Introduction To MATLAB For Engineers, Third Edition: An Overview of MATLABDocument47 pagesIntroduction To MATLAB For Engineers, Third Edition: An Overview of MATLABSeyed SadeghPas encore d'évaluation
- Modal Analysis of Beams - An Experiment Symposium On Dynamic Problems of MechanicsDocument9 pagesModal Analysis of Beams - An Experiment Symposium On Dynamic Problems of MechanicsnizamshahrinPas encore d'évaluation
- Solutions To Chapter 4 Problems: Problem 4.1Document59 pagesSolutions To Chapter 4 Problems: Problem 4.1Anonymous ZyDssAc7RcPas encore d'évaluation
- Analytical Methods of Position Analysis: Freudenstein's EquationDocument31 pagesAnalytical Methods of Position Analysis: Freudenstein's EquationAnkit AmbaniPas encore d'évaluation
- 9A03401 Kinematics of MachineryDocument8 pages9A03401 Kinematics of MachinerysivabharathamurthyPas encore d'évaluation
- CH 8 PDFDocument61 pagesCH 8 PDFGaurav Kumar100% (1)
- 10 02 Parabolic PDE IntroDocument26 pages10 02 Parabolic PDE IntroJohn Bofarull GuixPas encore d'évaluation
- Alberty-Matlab Implementation of Fem in ElasticityDocument25 pagesAlberty-Matlab Implementation of Fem in ElasticityRick HunterPas encore d'évaluation
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDocument49 pagesTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- Numerical Integration Methods4681.6Document26 pagesNumerical Integration Methods4681.6Muhammad FirdawsPas encore d'évaluation
- Newton's Divided Difference Interpolation FormulaDocument31 pagesNewton's Divided Difference Interpolation FormulaAnuraj N VPas encore d'évaluation
- Matlab Methods For OdeDocument16 pagesMatlab Methods For OdeGrassrehLePas encore d'évaluation
- Code for heart sound segmentationDocument9 pagesCode for heart sound segmentationAvinash BaldiPas encore d'évaluation
- Control Systems Resource SheetDocument12 pagesControl Systems Resource SheetCharlie Ho SiPas encore d'évaluation
- 13.differentiation and Integration of Power Series PDFDocument11 pages13.differentiation and Integration of Power Series PDFAtikah JPas encore d'évaluation
- AITS 2014 CRT III JEEM+JEEA Advanced PAPER 1 Questions PAPERDocument19 pagesAITS 2014 CRT III JEEM+JEEA Advanced PAPER 1 Questions PAPERlonglostloner889Pas encore d'évaluation
- Interpolation: Finite DifferencesDocument18 pagesInterpolation: Finite DifferencesImrul HasanPas encore d'évaluation
- Nonlinear Systems - Newton MethodDocument4 pagesNonlinear Systems - Newton MethodFadel AlfarouqPas encore d'évaluation
- Rosen Gradient Projection MethodDocument7 pagesRosen Gradient Projection MethodSreevatsanadigPas encore d'évaluation
- Exact Solution To Free Vibration of Beams Partially Supported by An Elastic FoundationDocument11 pagesExact Solution To Free Vibration of Beams Partially Supported by An Elastic FoundationSurej Jayan CherilPas encore d'évaluation
- Pole Placement1Document46 pagesPole Placement1masd100% (1)
- MATLAB Symbolic Mathematics TutorialDocument9 pagesMATLAB Symbolic Mathematics Tutorialeebeta100% (9)
- Green's Functions For The Stretched String Problem: D. R. Wilton ECE DeptDocument34 pagesGreen's Functions For The Stretched String Problem: D. R. Wilton ECE DeptSri Nivas ChandrasekaranPas encore d'évaluation
- Study of Forced Double PendulumsDocument17 pagesStudy of Forced Double PendulumsrizkibiznizPas encore d'évaluation
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderPas encore d'évaluation
- Spatial Mechanisms Lecture NotesDocument77 pagesSpatial Mechanisms Lecture NotesErico Eric100% (1)
- Solving Ordinary Differential Equations - Sage Reference Manual v7Document13 pagesSolving Ordinary Differential Equations - Sage Reference Manual v7amyounisPas encore d'évaluation
- Numerical Methods Final Requirements ShshsiwzbDocument10 pagesNumerical Methods Final Requirements ShshsiwzbIñigo Carlos AquinoPas encore d'évaluation
- Solution of State Space EquationDocument11 pagesSolution of State Space EquationAnirban MitraPas encore d'évaluation
- Solution:: 2-9 Solving Absolute Value Equations and Inequalities by GraphingDocument47 pagesSolution:: 2-9 Solving Absolute Value Equations and Inequalities by GraphingHasan EserPas encore d'évaluation
- Frequency Response of 10 Degrees of Freedom Full-Car Model For Ride ComfortDocument7 pagesFrequency Response of 10 Degrees of Freedom Full-Car Model For Ride ComfortijsretPas encore d'évaluation
- 16Sp-Quiz 2 SolutionDocument1 page16Sp-Quiz 2 SolutionKalisetty SwethaPas encore d'évaluation
- Modern Control Sys-Lecture Vi PDFDocument46 pagesModern Control Sys-Lecture Vi PDFMtanzania MtanzaniaPas encore d'évaluation
- Chapter 17 PDFDocument10 pagesChapter 17 PDFChirilicoPas encore d'évaluation
- Solving ODE-BVP Using The Galerkin's MethodDocument14 pagesSolving ODE-BVP Using The Galerkin's MethodSuddhasheel Basabi GhoshPas encore d'évaluation
- Support Vector MachinesDocument24 pagesSupport Vector Machinesanshul77Pas encore d'évaluation
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsD'EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsPas encore d'évaluation
- Dynamical Systems Method for Solving Nonlinear Operator EquationsD'EverandDynamical Systems Method for Solving Nonlinear Operator EquationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Iterative Solution of Nonlinear Equations in Several VariablesD'EverandIterative Solution of Nonlinear Equations in Several VariablesPas encore d'évaluation
- Lecture 15-18 Ch09 Complex NumbersDocument46 pagesLecture 15-18 Ch09 Complex Numbersameershamieh100% (1)
- WS16 - Normal Modes W - RBE2 - CONM2Document24 pagesWS16 - Normal Modes W - RBE2 - CONM2ameershamiehPas encore d'évaluation
- Lab 3 - Wind Tunnel and Boundary LayerDocument9 pagesLab 3 - Wind Tunnel and Boundary LayerameershamiehPas encore d'évaluation
- Reading Plumbing PlansDocument12 pagesReading Plumbing Planssolupa2000100% (1)
- Lecture 15-18 Ch09 Complex NumbersDocument46 pagesLecture 15-18 Ch09 Complex Numbersameershamieh100% (1)
- Lecture 21 Ch07 Equivalent MechanismDocument12 pagesLecture 21 Ch07 Equivalent MechanismameershamiehPas encore d'évaluation
- Lecture 11 12 Ch04 Instant CenterDocument16 pagesLecture 11 12 Ch04 Instant CenterameershamiehPas encore d'évaluation
- GearsDocument25 pagesGearsameershamiehPas encore d'évaluation
- Lecture 21 Ch07 Equivalent MechanismDocument12 pagesLecture 21 Ch07 Equivalent MechanismameershamiehPas encore d'évaluation
- George H.martin-Kinematics and Dynamics of Machines 1982Document512 pagesGeorge H.martin-Kinematics and Dynamics of Machines 1982Siavash KavianPas encore d'évaluation
- Homework Assignments and AnswersDocument3 pagesHomework Assignments and AnswersameershamiehPas encore d'évaluation
- Kinetics of Particles: Newton's Second Law: Fig. P12.100Document5 pagesKinetics of Particles: Newton's Second Law: Fig. P12.100asdsimPas encore d'évaluation
- CalibofMag 2012 PDFDocument4 pagesCalibofMag 2012 PDFShrikant RaoPas encore d'évaluation
- CVEN 3323 Weirs LabDocument5 pagesCVEN 3323 Weirs LabJJ Sean CruzPas encore d'évaluation
- 9 Oprema-OrdinacijeDocument10 pages9 Oprema-OrdinacijeAleksandar TanasijevicPas encore d'évaluation
- Experiment: Rotational Motion 1 The Relationship Between Linear and Angular QuantitiesDocument8 pagesExperiment: Rotational Motion 1 The Relationship Between Linear and Angular QuantitiesKamranPas encore d'évaluation
- Advanced AlgebraDocument699 pagesAdvanced AlgebraIosif Beniamin ȘolotPas encore d'évaluation
- DLLMEDocument9 pagesDLLMEkamiunPas encore d'évaluation
- Introduction To Mechanical Vibrations EnotesDocument14 pagesIntroduction To Mechanical Vibrations Enotesaayushmech18100% (2)
- Basic electric circuit concepts explainedDocument1 pageBasic electric circuit concepts explainedanothersomeguyPas encore d'évaluation
- 1 Fluid-Properties Tutorial-Solution PDFDocument15 pages1 Fluid-Properties Tutorial-Solution PDFIdate PatrickPas encore d'évaluation
- Advanced Engineering MathDocument43 pagesAdvanced Engineering MathJee RollsPas encore d'évaluation
- SteelDesign PlateGirder Fu NewDocument32 pagesSteelDesign PlateGirder Fu NewFhatony Silvershadows BondanPas encore d'évaluation
- Projectile MotionDocument40 pagesProjectile MotionJoshua VicentePas encore d'évaluation
- Pune Techtrol FGTDocument2 pagesPune Techtrol FGTBenjamin StricklandPas encore d'évaluation
- Introduction To The Statistical Drake EquationDocument55 pagesIntroduction To The Statistical Drake EquationMystery WirePas encore d'évaluation
- Polycyclic Aromatic Hydrocarbons (PAHs) (En)Document13 pagesPolycyclic Aromatic Hydrocarbons (PAHs) (En)Presa Rodrigo Gómez, "La Boca"Pas encore d'évaluation
- Bataan Heroes Memorial College Engineering and Architecture DepartmentDocument1 pageBataan Heroes Memorial College Engineering and Architecture DepartmentGABRIEL CUSTODIOPas encore d'évaluation
- MOdel Question Paper DOS 3Document2 pagesMOdel Question Paper DOS 3P.MohanaveluPas encore d'évaluation
- RTD Incotest PresentationDocument27 pagesRTD Incotest PresentationAsadAliPas encore d'évaluation
- Cadt BasicsDocument2 pagesCadt BasicsATUL CHAUHANPas encore d'évaluation
- Verbs Ending in - IerenDocument2 pagesVerbs Ending in - IerenAušrinė RadišauskaitėPas encore d'évaluation
- Report On Electrical Resistivity TestDocument9 pagesReport On Electrical Resistivity TestSurajit SahaPas encore d'évaluation
- Vibration Monitoring of VibrationsDocument18 pagesVibration Monitoring of VibrationsManel MontesinosPas encore d'évaluation
- IIEST Shibpur Soil Compaction ExperimentDocument5 pagesIIEST Shibpur Soil Compaction ExperimentSwapan PaulPas encore d'évaluation
- Maximizing Work Potential of Engineering SystemsDocument11 pagesMaximizing Work Potential of Engineering Systemsuma.nitw8088Pas encore d'évaluation
- The Physics of The Ear and Eye PDFDocument3 pagesThe Physics of The Ear and Eye PDFNorctoic onePas encore d'évaluation
- Basic Chemistry Concepts and CalculationsDocument4 pagesBasic Chemistry Concepts and CalculationsJatin SinglaPas encore d'évaluation
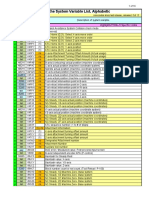
- SystemVarsAlpha List OkumaDocument16 pagesSystemVarsAlpha List Okumaseb_dominique100% (2)
- Industrial Plant For Distillation of Sulphate TurpentineDocument5 pagesIndustrial Plant For Distillation of Sulphate TurpentineDaniel YoworldPas encore d'évaluation
- Phy P1Document105 pagesPhy P1Godfrey Muchai100% (1)