Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyPas encore d'évaluation
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyPas encore d'évaluation
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyPas encore d'évaluation
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyPas encore d'évaluation
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyPas encore d'évaluation
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyPas encore d'évaluation
- Journal Article Without DOIDocument2 pagesJournal Article Without DOISatishReddyPas encore d'évaluation
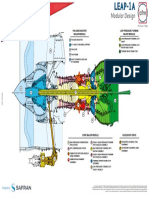
- LEAP-1A A3 Modular Design Rev2.0Document1 pageLEAP-1A A3 Modular Design Rev2.0SatishReddy100% (4)
- ATR 72-212A 01 of 2016Document1 pageATR 72-212A 01 of 2016SatishReddyPas encore d'évaluation
- M11 May 2018Document8 pagesM11 May 2018SatishReddyPas encore d'évaluation
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyPas encore d'évaluation
- Approved Course Mto TRV PDFDocument1 pageApproved Course Mto TRV PDFSatishReddyPas encore d'évaluation
- Module 3 QsDocument44 pagesModule 3 QsSatishReddyPas encore d'évaluation
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- ProjectDocument4 pagesProjectSatishReddyPas encore d'évaluation
- Dissertation BitsDocument21 pagesDissertation BitsSatishReddyPas encore d'évaluation
- Task 46!21!00-740-001-A Bite Test of The AtimsDocument4 pagesTask 46!21!00-740-001-A Bite Test of The AtimsSatishReddy100% (1)
- Task 46!21!00-710-002-A VHF 3 Link Test of The AtsuDocument8 pagesTask 46!21!00-710-002-A VHF 3 Link Test of The AtsuSatishReddyPas encore d'évaluation
- TASK 12!13!79-610-011-A Check Oil Level and ReplenishDocument6 pagesTASK 12!13!79-610-011-A Check Oil Level and ReplenishSatishReddyPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- VF VaconDocument47 pagesVF VaconthànhPas encore d'évaluation
- If10 User Manual English - 20200108124200SBccBLaEa5Document29 pagesIf10 User Manual English - 20200108124200SBccBLaEa5Cutelaria ArtesanalPas encore d'évaluation
- UREA PRODUCTION REPORT FinalDocument17 pagesUREA PRODUCTION REPORT FinalAmir Javed officialPas encore d'évaluation
- Process Dynamics and Control: BITS PilaniDocument30 pagesProcess Dynamics and Control: BITS PilaniShubham ChoudharyPas encore d'évaluation
- RSI H2 Series - VFD ManualDocument396 pagesRSI H2 Series - VFD ManualIsidro PortugalPas encore d'évaluation
- PID ControllerDocument267 pagesPID ControllercarolinemarinhoPas encore d'évaluation
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocument7 pagesSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaPas encore d'évaluation
- Design of PID Controller For Level LoopDocument9 pagesDesign of PID Controller For Level LoopFerry DewantoPas encore d'évaluation
- Tuning of PID Controller Using Ziegler-Nichols Method For DC Motor Speed ControlDocument19 pagesTuning of PID Controller Using Ziegler-Nichols Method For DC Motor Speed ControlMubashir RasoolPas encore d'évaluation
- Cn32Pt, Cn16Pt, Cn16Ptd, Cn8Pt, Cn8Ptd, Cn8Ept: Temperature & Process ControllersDocument79 pagesCn32Pt, Cn16Pt, Cn16Ptd, Cn8Pt, Cn8Ptd, Cn8Ept: Temperature & Process Controllerscraigorio616Pas encore d'évaluation
- Lecture1, Process Control and AnalysisDocument60 pagesLecture1, Process Control and AnalysisPaul RwomwijhuPas encore d'évaluation
- Manual 111010 XMT1000 Temperature ControllerDocument5 pagesManual 111010 XMT1000 Temperature Controllerfernando mamani leon100% (1)
- DC Motor ModelingDocument2 pagesDC Motor Modelingkakavietnam9Pas encore d'évaluation
- CAPTAIN Getting StartedDocument29 pagesCAPTAIN Getting StartedmgrubisicPas encore d'évaluation
- Literatrure ReviewDocument12 pagesLiteratrure ReviewShubham GuptaPas encore d'évaluation
- Evolution of Sinusoidal Encoder InterpolatorsDocument13 pagesEvolution of Sinusoidal Encoder InterpolatorsRaulFghiPas encore d'évaluation
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliPas encore d'évaluation
- Dsa 0026528Document2 pagesDsa 002652820824ddPas encore d'évaluation
- Concepts For Position and Load Control For Hybrid ActuationDocument8 pagesConcepts For Position and Load Control For Hybrid Actuationgurivi201Pas encore d'évaluation
- 3aua0000004591 RevdDocument32 pages3aua0000004591 RevdOrlandoPas encore d'évaluation
- PID Control of Heat Exchanger System: Yuvraj Bhushan Khare Yaduvir SinghDocument6 pagesPID Control of Heat Exchanger System: Yuvraj Bhushan Khare Yaduvir SinghJudy Ann BosePas encore d'évaluation
- CPB30004 Process Dynamics and Control Experiment 4: Gas Pressure Process Control Lab ReportDocument18 pagesCPB30004 Process Dynamics and Control Experiment 4: Gas Pressure Process Control Lab ReportSiti Hajar Mohamed100% (19)
- Control Strategies For Crane Systems A Comprehensive Review - 2017Document23 pagesControl Strategies For Crane Systems A Comprehensive Review - 2017oscar201140100% (1)
- Compensator Design II PDFDocument37 pagesCompensator Design II PDFMani Vannan SoundarapandiyanPas encore d'évaluation
- Aspen ExamplesDocument100 pagesAspen ExamplesEngr Mohammad Farhan100% (1)
- Automation StudioDocument28 pagesAutomation Studiosilviobarros100% (2)
- Chapter 12Document58 pagesChapter 12Nigel KowPas encore d'évaluation
- Manual Controlador de Temperatura TCM Scantech SERIESDocument4 pagesManual Controlador de Temperatura TCM Scantech SERIESAlex RiveraPas encore d'évaluation
- Manual Balanceadora HunterDocument19 pagesManual Balanceadora HunterAriel MercochaPas encore d'évaluation
- Air Flow System Process Control (DCS)Document8 pagesAir Flow System Process Control (DCS)JoannaJames100% (1)