Vous aimerez peut-être aussi
- Sullair WSDocument70 pagesSullair WSToso Eko Purwanto100% (1)
- Equipment Pre Mobilization ChecklistDocument26 pagesEquipment Pre Mobilization ChecklistCendi Grab100% (2)
- MIT8 01SC Problems28 Gaya SentralDocument9 pagesMIT8 01SC Problems28 Gaya SentralAbdul HamidPas encore d'évaluation
- Chap 11 SMDocument96 pagesChap 11 SMananiasrenato100% (1)
- White Paper On The CheyTac M200 SystemDocument20 pagesWhite Paper On The CheyTac M200 Systemopksrj100% (1)
- Astrophysics 1st and 2nd LecturesDocument37 pagesAstrophysics 1st and 2nd LecturesBelete DeguPas encore d'évaluation
- Chapter 6 GravitationDocument7 pagesChapter 6 GravitationJonathan Teng100% (1)
- Two Body ProblemDocument25 pagesTwo Body ProblemNathanianPas encore d'évaluation
- PHYS122 University of WaterlooDocument174 pagesPHYS122 University of WaterlooEddy LiuPas encore d'évaluation
- New Concepts in GravitationDocument13 pagesNew Concepts in GravitationMikePas encore d'évaluation
- Ilcev ICEEOT Pg4505-4513 2016Document9 pagesIlcev ICEEOT Pg4505-4513 2016Eslam SaeedPas encore d'évaluation
- Ast1100 FullstendigDocument310 pagesAst1100 FullstendigOana MerfeaPas encore d'évaluation
- Lecture L15 - Central Force Motion: Kepler's LawsDocument12 pagesLecture L15 - Central Force Motion: Kepler's Lawsletter_ashish4444Pas encore d'évaluation
- Senior Project: Andy Erickson May 15, 2009Document32 pagesSenior Project: Andy Erickson May 15, 2009Akash PradhanPas encore d'évaluation
- Mechanics-Probs4 2017Document5 pagesMechanics-Probs4 2017Diego ForeroPas encore d'évaluation
- Lec09 NotesDocument5 pagesLec09 NotesbharathshajiPas encore d'évaluation
- N - Body Problem: L1 A3-401 - Newton's Law of GravitationDocument22 pagesN - Body Problem: L1 A3-401 - Newton's Law of Gravitationudayang5330Pas encore d'évaluation
- Gravitation (Irodove)Document25 pagesGravitation (Irodove)akhileshvv123Pas encore d'évaluation
- Windri Suci Gaitari 17033170 Tugas06Document30 pagesWindri Suci Gaitari 17033170 Tugas06Alidar AndestaPas encore d'évaluation
- Earth-Moon Weak Stability Boundaries in The Restricted Three and Four Body ProblemDocument25 pagesEarth-Moon Weak Stability Boundaries in The Restricted Three and Four Body Problem897574012Pas encore d'évaluation
- HSChapter6 PDFDocument52 pagesHSChapter6 PDFVaishnavi kumariPas encore d'évaluation
- Computation of Weak Stability Boundaries: Sun-Jupiter SystemDocument15 pagesComputation of Weak Stability Boundaries: Sun-Jupiter SystemcmpmarinhoPas encore d'évaluation
- Gravitaion and Central ForceDocument4 pagesGravitaion and Central ForceKrisnendu BiswasPas encore d'évaluation
- Tipler and Mosca 6 e CH 11Document94 pagesTipler and Mosca 6 e CH 11Paper CutPas encore d'évaluation
- Applicability and Dynamical Characterization of WSB Associated Sets in The Lunar SOIDocument39 pagesApplicability and Dynamical Characterization of WSB Associated Sets in The Lunar SOIterramaisa2010Pas encore d'évaluation
- Third-Body Perturbation Effects On Satellite Formations: Christopher W. T. Roscoe Srinivas R. Vadali Kyle T. AlfriendDocument26 pagesThird-Body Perturbation Effects On Satellite Formations: Christopher W. T. Roscoe Srinivas R. Vadali Kyle T. AlfriendBatman BatmanPas encore d'évaluation
- Orbital Mechanics: 3. Keplerian OrbitsDocument13 pagesOrbital Mechanics: 3. Keplerian Orbitsfzfy3j2Pas encore d'évaluation
- MAE155A Lecture06 PDFDocument11 pagesMAE155A Lecture06 PDFa320neoPas encore d'évaluation
- CP1 June 2018Document5 pagesCP1 June 2018Sifei ZhangPas encore d'évaluation
- Precession of The Perihelion of Mercury's Orbit: Department of Physics, Wayne State University, Detroit, Michigan 48202Document5 pagesPrecession of The Perihelion of Mercury's Orbit: Department of Physics, Wayne State University, Detroit, Michigan 48202gauravniralaPas encore d'évaluation
- Problem Set 4Document5 pagesProblem Set 4James ConnaughtonPas encore d'évaluation
- ch13 PWDocument20 pagesch13 PWPaulo WillianPas encore d'évaluation
- Week6 Homework4 PulsarsDocument5 pagesWeek6 Homework4 PulsarsastodudePas encore d'évaluation
- Physics 18 Spring 2011 Homework 9 - Solutions Wednesday March 16, 2011Document5 pagesPhysics 18 Spring 2011 Homework 9 - Solutions Wednesday March 16, 2011Jhann ReyesPas encore d'évaluation
- New Concepts in GravitationDocument13 pagesNew Concepts in GravitationAce Ralph100% (1)
- Universal GravitationDocument46 pagesUniversal GravitationNurulWardhani11Pas encore d'évaluation
- GPS NOTES Chapter 2Document7 pagesGPS NOTES Chapter 2Marcel MhuruPas encore d'évaluation
- KeplerDocument7 pagesKeplerruloneggerPas encore d'évaluation
- HWCH 13 BDocument3 pagesHWCH 13 BJoy CloradoPas encore d'évaluation
- Shape of A Rotating StarDocument10 pagesShape of A Rotating StarTrevor DavisPas encore d'évaluation
- Gravito ElectromagnetismDocument15 pagesGravito Electromagnetismfevv1610Pas encore d'évaluation
- Chapter 6 Gravitation RevisionDocument8 pagesChapter 6 Gravitation Revision陈伟明Pas encore d'évaluation
- GravitationalDocument8 pagesGravitationalRathankar RaoPas encore d'évaluation
- ResonanceDocument48 pagesResonancePrakash Nik79% (92)
- The Motion of A Top: 1.1 Rolling Without FrictionDocument11 pagesThe Motion of A Top: 1.1 Rolling Without FrictionShubham RajPas encore d'évaluation
- Physics ProjectDocument58 pagesPhysics ProjectNavneet100% (3)
- Gravitation Theory EDocument26 pagesGravitation Theory Ethinkiit0% (1)
- Rigid Body DynamicsDocument17 pagesRigid Body Dynamicsrammi4978Pas encore d'évaluation
- 9 - Formiga-Santos2016 Article OrbitalManeuversToReachAndExplDocument13 pages9 - Formiga-Santos2016 Article OrbitalManeuversToReachAndExpldenilsonpauloPas encore d'évaluation
- Ch11 SSMDocument24 pagesCh11 SSMJuanca AbadPas encore d'évaluation
- Assignment On AstrophysicsDocument5 pagesAssignment On AstrophysicsNarayanan Elatchoumy PadyPas encore d'évaluation
- 3 SLEM Gen Physics 1 Week 3 2nd Q QATEAM.v.1.0 Optimized PDFDocument9 pages3 SLEM Gen Physics 1 Week 3 2nd Q QATEAM.v.1.0 Optimized PDFSyrille Glenn BatingalPas encore d'évaluation
- 12.510 Introduction To Seismology: Mit OpencoursewareDocument13 pages12.510 Introduction To Seismology: Mit OpencoursewareMasykur Rizal ASPas encore d'évaluation
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?D'EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Pas encore d'évaluation
- Zero Point Energy Per Stereo Radian and the Distribution of Gravitational Acceleration of Planets Throughout the Solar System.: The Origin and Cause of GravitationD'EverandZero Point Energy Per Stereo Radian and the Distribution of Gravitational Acceleration of Planets Throughout the Solar System.: The Origin and Cause of GravitationPas encore d'évaluation
- Lectures on Stellar StatisticsD'EverandLectures on Stellar StatisticsPas encore d'évaluation
- New Ideas for a New Era: Introduction to New Insights in Physics and Mathematics for a More Complete and Deeper Understanding of RealityD'EverandNew Ideas for a New Era: Introduction to New Insights in Physics and Mathematics for a More Complete and Deeper Understanding of RealityPas encore d'évaluation
- Plaxis ParameterDocument3 pagesPlaxis Parameterraju_420034520Pas encore d'évaluation
- Trigonometry 02 - Class Notes - Trigonometry-2Document34 pagesTrigonometry 02 - Class Notes - Trigonometry-2Himanshu SinghPas encore d'évaluation
- Investigation of Chloro Pentaammine Cobalt (III) Chloride - Polyvinyl Alcohol CompositesDocument5 pagesInvestigation of Chloro Pentaammine Cobalt (III) Chloride - Polyvinyl Alcohol CompositesAlexander DeckerPas encore d'évaluation
- Structural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightDocument20 pagesStructural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightNasser ShelilPas encore d'évaluation
- 13 TE - ETC - 2015-Final-29.4.15Document27 pages13 TE - ETC - 2015-Final-29.4.15raoli411Pas encore d'évaluation
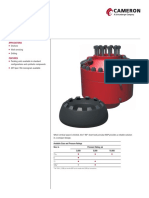
- Short-Body Annular BOP: ApplicationsDocument2 pagesShort-Body Annular BOP: ApplicationsMEHDIPas encore d'évaluation
- ASTM D 3682-01 Major and Minor Elements in Combustion Residues FromDocument6 pagesASTM D 3682-01 Major and Minor Elements in Combustion Residues FromBalas43Pas encore d'évaluation
- Van Eekelen Et Al 2011 BS8006 FinalDocument15 pagesVan Eekelen Et Al 2011 BS8006 FinalRaden Budi HermawanPas encore d'évaluation
- Computer Controlled Process Control System With SCADA and PID ControlDocument12 pagesComputer Controlled Process Control System With SCADA and PID Controldwi meyPas encore d'évaluation
- Petroleum Resources and ReservesDocument25 pagesPetroleum Resources and ReservesDarío CruzPas encore d'évaluation
- StructuralMechanicsModuleUsersGuide PDFDocument420 pagesStructuralMechanicsModuleUsersGuide PDFFrancisco RibeiroPas encore d'évaluation
- Tapas Question Paper 2017 PDFDocument20 pagesTapas Question Paper 2017 PDFRamesh G100% (1)
- RD2.0E To RD200E: Zener DiodesDocument12 pagesRD2.0E To RD200E: Zener DiodesДрагиша Небитни ТрифуновићPas encore d'évaluation
- EAp1 Basis of DesignDocument6 pagesEAp1 Basis of DesignSaahil KhaanPas encore d'évaluation
- Reaction MechanismDocument5 pagesReaction MechanismKatniss Tathagata100% (1)
- Lecture 1: Fundamentals 1/3: Discretization Of: Convection-Diffusion Equation by Finite Difference MethodDocument27 pagesLecture 1: Fundamentals 1/3: Discretization Of: Convection-Diffusion Equation by Finite Difference MethodJulio Santos100% (1)
- Pressure Vessel, Asme CodeDocument10 pagesPressure Vessel, Asme Codeabhi_mohit2005100% (1)
- Chop-Nod TutorialDocument13 pagesChop-Nod TutorialShubhendra DasPas encore d'évaluation
- Max31856 2Document30 pagesMax31856 2Natália Borges MarcelinoPas encore d'évaluation
- B.tech. - R09 - CSE - Academic Regulations SyllabusDocument199 pagesB.tech. - R09 - CSE - Academic Regulations SyllabusLokesh ReddyPas encore d'évaluation
- Lecture3 (RockTestingTechnique)Document50 pagesLecture3 (RockTestingTechnique)chouszeszePas encore d'évaluation
- Cambridge International A Level: Mathematics 9709/31 May/June 2020Document13 pagesCambridge International A Level: Mathematics 9709/31 May/June 2020Mubashir AsifPas encore d'évaluation
- ZL - 209Document2 pagesZL - 209Fraz AhmadPas encore d'évaluation
- Evosta Ts EngDocument3 pagesEvosta Ts Engmky_roPas encore d'évaluation
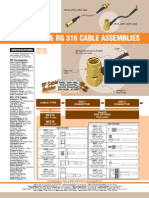
- RF316Document2 pagesRF316Marcelo Carneiro de PaivaPas encore d'évaluation
- Design of Steel Beams With Discrete Late PDFDocument9 pagesDesign of Steel Beams With Discrete Late PDFsathiyanPas encore d'évaluation
- Chapter 3Document16 pagesChapter 3abadittadessePas encore d'évaluation