Vous aimerez peut-être aussi
- A Comparative Study of Machine Learning Algorithms For Gas Leak DetectionDocument9 pagesA Comparative Study of Machine Learning Algorithms For Gas Leak DetectionAkhil YadavPas encore d'évaluation
- Research Proposal RubricsDocument1 pageResearch Proposal RubricsRonnie Dalgo0% (1)
- Basement Masonry Wall Design Based On TMS 402-16/13: Input Data & Design SummaryDocument2 pagesBasement Masonry Wall Design Based On TMS 402-16/13: Input Data & Design SummaryRidho ZiskaPas encore d'évaluation
- RFQ - Tank DemuckingDocument12 pagesRFQ - Tank Demuckingmuhamadrafie1975100% (1)
- Adaptive Synchronization of Chaotic Systems and Its Application To Secure CommunicationsDocument10 pagesAdaptive Synchronization of Chaotic Systems and Its Application To Secure CommunicationsRafael Gonçalves de LimaPas encore d'évaluation
- Fault Tolerant Tracking Control For Hybrid NonlineDocument24 pagesFault Tolerant Tracking Control For Hybrid NonlineprobaPas encore d'évaluation
- Automatic ControlDocument14 pagesAutomatic Controlmagdi elmalekPas encore d'évaluation
- Model Fuuzy PaperDocument20 pagesModel Fuuzy PaperlamuelPas encore d'évaluation
- TomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishDocument27 pagesTomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishMan EbookPas encore d'évaluation
- Rezumat Adrian DUKADocument0 pageRezumat Adrian DUKADina GaranPas encore d'évaluation
- Stability Analysis Systems by Lyapunov's Direct Method: of PowerDocument5 pagesStability Analysis Systems by Lyapunov's Direct Method: of Powersreekantha2013Pas encore d'évaluation
- Model-Free Sliding-Mode Control For Systems With Input-And State - Dependent DisturbancesDocument4 pagesModel-Free Sliding-Mode Control For Systems With Input-And State - Dependent Disturbances王和盛Pas encore d'évaluation
- Fault Detection Based On Higher-Order Sliding Mode Observer For A Class of Switched Linear SystemsDocument8 pagesFault Detection Based On Higher-Order Sliding Mode Observer For A Class of Switched Linear Systemsbnousaid2014Pas encore d'évaluation
- Fault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysDocument17 pagesFault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysBALASUBRAMANI MPas encore d'évaluation
- Determinacion Del d50c PDFDocument5 pagesDeterminacion Del d50c PDFAnonymous caHv3DvtPas encore d'évaluation
- Adaptive Output Feedback Based On Closed-Loop Reference ModelsDocument6 pagesAdaptive Output Feedback Based On Closed-Loop Reference Modelsdebasishmee5808Pas encore d'évaluation
- H Filtering For T-S Fuzzy Networked Systems With Stochastic Multiple Delays and Sensor FaultsDocument29 pagesH Filtering For T-S Fuzzy Networked Systems With Stochastic Multiple Delays and Sensor FaultsBharathPas encore d'évaluation
- NN ControlDocument30 pagesNN ControlRam KumarPas encore d'évaluation
- Synthesis of Switching Controllers A Fuzzy SupervisorDocument16 pagesSynthesis of Switching Controllers A Fuzzy SupervisornooraniaPas encore d'évaluation
- Husek - 2008 - Systems, Structure and ControlDocument256 pagesHusek - 2008 - Systems, Structure and Controlpss196203Pas encore d'évaluation
- Full Paper INVESTIGATION ON CONTROLLABILITY OBSERVABILITY AND STABILITY FOR PLANT OPTIMAL CONTROL PERFORMANCEDocument9 pagesFull Paper INVESTIGATION ON CONTROLLABILITY OBSERVABILITY AND STABILITY FOR PLANT OPTIMAL CONTROL PERFORMANCEHamed TirandazPas encore d'évaluation
- Fault Tolerant Control For Takagi-Sugeno Systems With Unmeasurable Premise Variables by Trajectory TrackingDocument6 pagesFault Tolerant Control For Takagi-Sugeno Systems With Unmeasurable Premise Variables by Trajectory TrackingKhaoula FerganiPas encore d'évaluation
- Perspectives Offuzzy Systems and ControlDocument13 pagesPerspectives Offuzzy Systems and ControlRAUL CORTESPas encore d'évaluation
- Non-Fragile Observer-Based Passive Control For Discrete-Time Systems With Repeated Scalar Non-LinearitiesDocument18 pagesNon-Fragile Observer-Based Passive Control For Discrete-Time Systems With Repeated Scalar Non-Linearitiesbalraj dPas encore d'évaluation
- 1 s2.0 S0016003223002533 MainDocument26 pages1 s2.0 S0016003223002533 Maincepheid_luPas encore d'évaluation
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedPas encore d'évaluation
- Non-monotonic Approach to Robust H∞ Control of Multi-model SystemsD'EverandNon-monotonic Approach to Robust H∞ Control of Multi-model SystemsPas encore d'évaluation
- Deep Reinforcement Learning With Guaranteed Performance: Yinyan Zhang Shuai Li Xuefeng ZhouDocument237 pagesDeep Reinforcement Learning With Guaranteed Performance: Yinyan Zhang Shuai Li Xuefeng ZhouAnkit SharmaPas encore d'évaluation
- Lecture Notes in Control and Information Sciences: EditorsDocument19 pagesLecture Notes in Control and Information Sciences: EditorseankuetPas encore d'évaluation
- Lecture NotesDocument70 pagesLecture NotesPrathamraj ChauhanPas encore d'évaluation
- Adaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeDocument18 pagesAdaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeLittle ChickPas encore d'évaluation
- 2012 673136 PDFDocument17 pages2012 673136 PDFarviandyPas encore d'évaluation
- Dynamics of SystemsDocument2 pagesDynamics of SystemssonikinPas encore d'évaluation
- Automatic Control Systems With MATLAB, 2nd Edition (S. Palani)Document922 pagesAutomatic Control Systems With MATLAB, 2nd Edition (S. Palani)biobalamtechPas encore d'évaluation
- Adaptive Learning Feedback LinearizationDocument9 pagesAdaptive Learning Feedback LinearizationFouad YacefPas encore d'évaluation
- Local Robust Stability On Compact Set For NonlineaDocument11 pagesLocal Robust Stability On Compact Set For NonlineaasadPas encore d'évaluation
- The Power Transformer Differential Protection Using Decision TreeDocument13 pagesThe Power Transformer Differential Protection Using Decision Treehack fjPas encore d'évaluation
- A Markovian System Approach To Distributed H Filteri - 2014 - Journal of The FRDocument17 pagesA Markovian System Approach To Distributed H Filteri - 2014 - Journal of The FR彭力Pas encore d'évaluation
- State Space Systems With Time-Delays Analysis, Identification, and ApplicationsD'EverandState Space Systems With Time-Delays Analysis, Identification, and ApplicationsPas encore d'évaluation
- Control and Instrumentation: AssignmentDocument36 pagesControl and Instrumentation: AssignmentMuhammad FaizanPas encore d'évaluation
- Near Real-Time Autonomous Health Monitoring of Actuators: Fault Detection and ReconfigurationDocument13 pagesNear Real-Time Autonomous Health Monitoring of Actuators: Fault Detection and ReconfigurationelmerkhPas encore d'évaluation
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddPas encore d'évaluation
- DSCC2015-9724: Event-Triggered Adaptive ControlDocument6 pagesDSCC2015-9724: Event-Triggered Adaptive ControlTu DuongPas encore d'évaluation
- Hybrid Physics-Based and Data-Driven PHM: H. Hanachi, W. Yu, I.Y. Kim and C.K. MechefskeDocument13 pagesHybrid Physics-Based and Data-Driven PHM: H. Hanachi, W. Yu, I.Y. Kim and C.K. MechefskeSudipto RayPas encore d'évaluation
- Multi-Sensor Switching Strategy For Automotive Longitudinal ControlDocument6 pagesMulti-Sensor Switching Strategy For Automotive Longitudinal ControlMarioPas encore d'évaluation
- Fuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineDocument5 pagesFuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineJournal 4 ResearchPas encore d'évaluation
- Verbeek e Nijman - Testing For Selectivity Bias in Panel Data ModelsDocument24 pagesVerbeek e Nijman - Testing For Selectivity Bias in Panel Data Modelsstehta16529Pas encore d'évaluation
- Further Results On Quantized Feedback Sliding Mode Control of Linear Uncertain SystemsDocument5 pagesFurther Results On Quantized Feedback Sliding Mode Control of Linear Uncertain SystemsWaj DIPas encore d'évaluation
- 07 - Sliding Mode Predictive Control of Linear Uncertain Systems With DelaysDocument7 pages07 - Sliding Mode Predictive Control of Linear Uncertain Systems With Delaysjap_thaygor5925Pas encore d'évaluation
- Temperature Control of Water Bath by Using Neuro-Fuzzy ControllerDocument9 pagesTemperature Control of Water Bath by Using Neuro-Fuzzy ControllerDuong Ng DinhPas encore d'évaluation
- Papers Ball and PlateDocument8 pagesPapers Ball and PlateRodriPas encore d'évaluation
- Robust Interval Observers For Uncertain Chaotic SystemsDocument6 pagesRobust Interval Observers For Uncertain Chaotic SystemsWissal KHEMIRIPas encore d'évaluation
- Design Strategies For Iterative Learning Control Based On Optimal ControlDocument8 pagesDesign Strategies For Iterative Learning Control Based On Optimal Controlsaadi0Pas encore d'évaluation
- Feedback Stabilization of Nonholonomic Systems: JANUARY 1996Document7 pagesFeedback Stabilization of Nonholonomic Systems: JANUARY 1996Lieza OthmanPas encore d'évaluation
- Paper 22 - Adaptive Outlier-Tolerant Exponential Smoothing Prediction Algorithms With Applications To Predict The Temperature in SpacecraftDocument4 pagesPaper 22 - Adaptive Outlier-Tolerant Exponential Smoothing Prediction Algorithms With Applications To Predict The Temperature in SpacecraftEditor IJACSAPas encore d'évaluation
- Neural Network Adaptive Control For A Class of Nonlinear Uncertain Dynamical Systems With Asymptotic Stability GuaranteesDocument10 pagesNeural Network Adaptive Control For A Class of Nonlinear Uncertain Dynamical Systems With Asymptotic Stability GuaranteesRyan DuttPas encore d'évaluation
- 06 Chapter 1Document14 pages06 Chapter 1Dharmaraj MaheswariPas encore d'évaluation
- Control System & Fuzzy Logic - Lab Manual - 23 - 24Document55 pagesControl System & Fuzzy Logic - Lab Manual - 23 - 24abhisheknalawade2004Pas encore d'évaluation
- Design of A Unified Adaptive Fuzzy Observer For UncertainDocument15 pagesDesign of A Unified Adaptive Fuzzy Observer For UncertainWalid AbidPas encore d'évaluation
- Adaptive Neural-Networks-Based Fault Detection and Diagnosis Using Unmeasured StatesDocument11 pagesAdaptive Neural-Networks-Based Fault Detection and Diagnosis Using Unmeasured StatesWalid AbidPas encore d'évaluation
- Modeling of Electromechanical Systems PDFDocument44 pagesModeling of Electromechanical Systems PDFBrandon GordonPas encore d'évaluation
- Recent Advances in Chaotic Systems and Synchronization: From Theory to Real World ApplicationsD'EverandRecent Advances in Chaotic Systems and Synchronization: From Theory to Real World ApplicationsOlfa BoubakerPas encore d'évaluation
- KEY WORDS: Notation, Badminton, Playing Pattern, Game Strategy, TacticsDocument6 pagesKEY WORDS: Notation, Badminton, Playing Pattern, Game Strategy, Tacticsmorteza2885Pas encore d'évaluation
- 1562014project AssistantDocument5 pages1562014project Assistantmorteza2885Pas encore d'évaluation
- Assign4 SolDocument5 pagesAssign4 Solmorteza2885Pas encore d'évaluation
- Fundamentals of Communications Examination From The Winter Semester 1999 (Partially Translated) Subject 1Document1 pageFundamentals of Communications Examination From The Winter Semester 1999 (Partially Translated) Subject 1morteza2885Pas encore d'évaluation
- It It It It It It It It It It It It ItDocument17 pagesIt It It It It It It It It It It It Itmorteza2885Pas encore d'évaluation
- Thinking in Java3Document1 pageThinking in Java3morteza2885Pas encore d'évaluation
- 1645388Document4 pages1645388morteza2885Pas encore d'évaluation
- Characterization of Electromagnetic Radiation Absorber MaterialsDocument4 pagesCharacterization of Electromagnetic Radiation Absorber Materialsmorteza2885Pas encore d'évaluation
- Poster SIL PDFDocument1 pagePoster SIL PDFvgogulakrishnanPas encore d'évaluation
- S9300&S9300E V200R001C00 Hardware Description 05 PDFDocument282 pagesS9300&S9300E V200R001C00 Hardware Description 05 PDFmike_mnleePas encore d'évaluation
- Long+term+storage+procedure 1151enDocument2 pagesLong+term+storage+procedure 1151enmohamadhakim.19789100% (1)
- 11kv BB1Document1 page11kv BB1Hammadiqbal12Pas encore d'évaluation
- V$SESSIONDocument8 pagesV$SESSIONCristiano Vasconcelos BarbosaPas encore d'évaluation
- 7ML19981GC61 1Document59 pages7ML19981GC61 1Andres ColladoPas encore d'évaluation
- Pre - FabricationDocument23 pagesPre - FabricationMahaveer Singh100% (1)
- AIX PowerHA (HACMP) CommandsDocument3 pagesAIX PowerHA (HACMP) CommandsdanilaixPas encore d'évaluation
- Database Upgrade 10g To 11gDocument28 pagesDatabase Upgrade 10g To 11gSubhasis1928Pas encore d'évaluation
- Brady Lecture 6Document32 pagesBrady Lecture 6TygerGoose0% (1)
- Photometric Design White PaperDocument5 pagesPhotometric Design White PaperScott VokeyPas encore d'évaluation
- Operator'S Manual: E-Series Ultraviolet Hand LampsDocument9 pagesOperator'S Manual: E-Series Ultraviolet Hand LampsGuiss LemaPas encore d'évaluation
- InternshipDocument14 pagesInternshipMohammed Shaheeruddin0% (1)
- Resolume Arena DMX Auto Map SheetDocument8 pagesResolume Arena DMX Auto Map SheetAdolfo GonzalezPas encore d'évaluation
- XDM-100 IOM SDH A00 4-5 enDocument334 pagesXDM-100 IOM SDH A00 4-5 endilipgulatiPas encore d'évaluation
- Ice Rink: Name OriginsDocument6 pagesIce Rink: Name Originsmichol2014Pas encore d'évaluation
- Resume EeeeDocument4 pagesResume EeeeWhilmark Tican MucaPas encore d'évaluation
- Harga Jual Genset Deutz GermanyDocument2 pagesHarga Jual Genset Deutz GermanyAgung SetiawanPas encore d'évaluation
- AR Porta CabinDocument2 pagesAR Porta CabinVp SreejithPas encore d'évaluation
- TPMS - A Learning GuideDocument14 pagesTPMS - A Learning GuideOrangeElectronicUsaPas encore d'évaluation
- Track 3 Tuesday MobilarisDocument15 pagesTrack 3 Tuesday Mobilarissaleema2010Pas encore d'évaluation
- PROSIS Part Information: Date: Image Id: Catalogue: ModelDocument2 pagesPROSIS Part Information: Date: Image Id: Catalogue: ModelAMIT SINGHPas encore d'évaluation
- Return Material Authorization: 1/2 RMA Number Customer No. Purchase Order No. Sales Order DateDocument2 pagesReturn Material Authorization: 1/2 RMA Number Customer No. Purchase Order No. Sales Order DateMichelle PadillaPas encore d'évaluation
- Durability of Culvert PipeDocument21 pagesDurability of Culvert PipeIftiPas encore d'évaluation
- Oracle Secure BackupDocument294 pagesOracle Secure BackupCarlos ValderramaPas encore d'évaluation
- BRKCCT-1002 Cisco Live Contact CenterDocument44 pagesBRKCCT-1002 Cisco Live Contact CenterArun GuptaPas encore d'évaluation
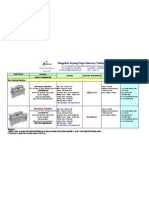
- Quotation For Blue Star Printek From Boway2010 (1) .09.04Document1 pageQuotation For Blue Star Printek From Boway2010 (1) .09.04Arvin Kumar GargPas encore d'évaluation