Vous aimerez peut-être aussi
- Stepless Variable Capacity ControlDocument7 pagesStepless Variable Capacity Controlswapneel_kulkarniPas encore d'évaluation
- Influence of Axial Compressor Flow Passage Geometry Changes On Gas Turbine Engine Work ParametersDocument10 pagesInfluence of Axial Compressor Flow Passage Geometry Changes On Gas Turbine Engine Work ParametersDyahSeptiWidhayatiPas encore d'évaluation
- Wartsila CPP PaperDocument4 pagesWartsila CPP Papergatheringforgardner9550Pas encore d'évaluation
- 1.1.1 Functions of Flow-Control ValvesDocument24 pages1.1.1 Functions of Flow-Control Valvesatashi baran mohantyPas encore d'évaluation
- SS 09Document3 pagesSS 09Ajaykumar TiwariPas encore d'évaluation
- Effects of Compressor Interstage PDFDocument38 pagesEffects of Compressor Interstage PDFeamazomPas encore d'évaluation
- 205 Drag Valves For Boiler Feedpump RecirculationDocument6 pages205 Drag Valves For Boiler Feedpump Recirculationesakkiraj1590Pas encore d'évaluation
- Lab 5 - Operating Characteristics of A Centrifugal PumpDocument9 pagesLab 5 - Operating Characteristics of A Centrifugal PumpGianne Nigelle DoriaPas encore d'évaluation
- Centrifugal Compressor Surge and Speed ControlDocument13 pagesCentrifugal Compressor Surge and Speed ControlDaniel Puello RodeloPas encore d'évaluation
- DesignRules For HighDampingDocument8 pagesDesignRules For HighDampingRajesh MalikPas encore d'évaluation
- 6.9 Calculation of Flow Quantity Through An Orifice: Equivalent To P Multiplied by QDocument3 pages6.9 Calculation of Flow Quantity Through An Orifice: Equivalent To P Multiplied by Qviano_octaPas encore d'évaluation
- Some Aspects of Numerical Simulation of Control Valves For Steam TurbinesDocument1 pageSome Aspects of Numerical Simulation of Control Valves For Steam TurbinesSharat ChandraPas encore d'évaluation
- Flow Control ValvesDocument6 pagesFlow Control ValvesMohamed RadwanPas encore d'évaluation
- 1 s2.0 S1877705816313145 MainDocument5 pages1 s2.0 S1877705816313145 MainKenny Lex LutorPas encore d'évaluation
- Characteristics of Control ValveDocument9 pagesCharacteristics of Control ValvecomodusPas encore d'évaluation
- Computational Fluid Dynamic Analysis of Flow Coefficient For Pan Check ValveDocument4 pagesComputational Fluid Dynamic Analysis of Flow Coefficient For Pan Check ValveMax KocourPas encore d'évaluation
- Variable Trim Compressor - A New Approach To Variable Compressor GeometryDocument10 pagesVariable Trim Compressor - A New Approach To Variable Compressor GeometryAlbert CalderonPas encore d'évaluation
- Fan PerformanceDocument8 pagesFan PerformanceRajeevAgrawalPas encore d'évaluation
- Valvulas STEPLESSDocument10 pagesValvulas STEPLESSHerlin MorenoPas encore d'évaluation
- Stepless Variable Capacity ControlDocument7 pagesStepless Variable Capacity ControlMOHAMADPas encore d'évaluation
- 7 - Control Valve CharacteristicsDocument11 pages7 - Control Valve CharacteristicsAhmed ShahabiPas encore d'évaluation
- Valve Characteristic Is The Relation Between The Flow Through The Valve and The Valve Stem PositionDocument13 pagesValve Characteristic Is The Relation Between The Flow Through The Valve and The Valve Stem PositionPortia ShilengePas encore d'évaluation
- Kaltfrase - BM - 1000 - 1200 - 1300 - 30 - 2 - & - 2 - PB - BK HidraulicoDocument249 pagesKaltfrase - BM - 1000 - 1200 - 1300 - 30 - 2 - & - 2 - PB - BK Hidraulicosebastian blancoPas encore d'évaluation
- Cowl DeflectionDocument7 pagesCowl DeflectionSrinivasan GunasekaranPas encore d'évaluation
- 07 Fluid Transports EquipmentsDocument12 pages07 Fluid Transports EquipmentsarfpowerPas encore d'évaluation
- Axial Compressor Chapter OneDocument15 pagesAxial Compressor Chapter OnenazeemlngPas encore d'évaluation
- Pneumatic - Book (5-17) PDFDocument13 pagesPneumatic - Book (5-17) PDFibnu100% (1)
- Flow Control ValvesDocument24 pagesFlow Control Valvesmk_chandru100% (1)
- Flowing Well PerformanceDocument57 pagesFlowing Well PerformanceTogoumas Djide100% (4)
- Flowing Well PerformanceDocument57 pagesFlowing Well PerformancemkwendePas encore d'évaluation
- Pump FundamentalsDocument127 pagesPump FundamentalsSheik Mohd50% (2)
- 3 Way ValveDocument8 pages3 Way ValveSoni Kristianto TariganPas encore d'évaluation
- Análisis of Ducted Propeller Design 1970-PhD - OosterveldDocument127 pagesAnálisis of Ducted Propeller Design 1970-PhD - Oosterveldfacio8483Pas encore d'évaluation
- Empuje Axial en Bombas VerticalesDocument6 pagesEmpuje Axial en Bombas VerticalesKaler Soto PeraltaPas encore d'évaluation
- Valve Control 0406Document15 pagesValve Control 0406Catalin PruncuPas encore d'évaluation
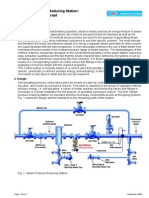
- PrdsDocument0 pagePrdssandi1111Pas encore d'évaluation
- Compressible Flow Across A Varying Area PassageDocument4 pagesCompressible Flow Across A Varying Area PassageGaurav VaibhavPas encore d'évaluation
- Ducted Prop For STOL PaperDocument8 pagesDucted Prop For STOL PaperLEADAPas encore d'évaluation
- Acoustical Modeling of Reciprocating Compressors With Stepless Unloaders PDFDocument12 pagesAcoustical Modeling of Reciprocating Compressors With Stepless Unloaders PDFRapee PuaksungnoenPas encore d'évaluation
- Pavc Complete Hy28 2662 CDDocument46 pagesPavc Complete Hy28 2662 CDMoein Emani100% (1)
- Antisurge Control SystemDocument10 pagesAntisurge Control Systemlac1981Pas encore d'évaluation
- Handout Water PumpDocument7 pagesHandout Water PumpGarrett KnappPas encore d'évaluation
- Sai New RegenerativeDocument20 pagesSai New RegenerativeMahesh APas encore d'évaluation
- Performance and Experimentation On Centrifugal PumpDocument10 pagesPerformance and Experimentation On Centrifugal PumpLohith AcharyaPas encore d'évaluation
- Control Valve Actuators and PositionersDocument23 pagesControl Valve Actuators and PositionersPg LisenPas encore d'évaluation
- Linear Hydraulic CircuitsDocument11 pagesLinear Hydraulic CircuitsBetileno QuadAlexPas encore d'évaluation
- Guidelines For Selecting The Proper Valve CharacteristicDocument6 pagesGuidelines For Selecting The Proper Valve CharacteristicIamPedroPas encore d'évaluation
- Pump Performance Four Quadrante - Pumping Thru ESPDocument8 pagesPump Performance Four Quadrante - Pumping Thru ESPTarcísio PortoPas encore d'évaluation
- Numerical Simulation of PCV ValveDocument5 pagesNumerical Simulation of PCV Valve11751175Pas encore d'évaluation
- t000005801 PDFDocument7 pagest000005801 PDFMohammed Hassan B KorainaPas encore d'évaluation
- Antisurge Control SystemDocument10 pagesAntisurge Control Systemsopan saPas encore d'évaluation
- 3 Surging Phenomena in Centrifugal Gas CompressorDocument33 pages3 Surging Phenomena in Centrifugal Gas CompressorDwi Muhammad PamungkasPas encore d'évaluation
- Analitcka Studija Dinamike I Stabinosti Sigurnosnog VentilaDocument8 pagesAnalitcka Studija Dinamike I Stabinosti Sigurnosnog VentilaMarko RisticPas encore d'évaluation
- Resumo I4Document10 pagesResumo I4Damy ManesiPas encore d'évaluation
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGD'EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGPas encore d'évaluation
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideD'EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideÉvaluation : 4 sur 5 étoiles4/5 (8)
- Understanding Welding Symbols Terms and DefinitionsDocument23 pagesUnderstanding Welding Symbols Terms and DefinitionsseymaPas encore d'évaluation
- AWS - Welding SymbolsDocument1 pageAWS - Welding SymbolsAli Saifullizan IsmailPas encore d'évaluation
- Deciphering Weld SymbolsDocument11 pagesDeciphering Weld SymbolsAhmad Reza AtefPas encore d'évaluation
- A675/A675MDocument5 pagesA675/A675Mpavan_joshi_5100% (1)
- Anodising ProcessDocument7 pagesAnodising Processpavan_joshi_5Pas encore d'évaluation
- Understanding Welding Symbols Terms and DefinitionsDocument23 pagesUnderstanding Welding Symbols Terms and DefinitionsseymaPas encore d'évaluation
- Understanding Welding Symbols Terms and DefinitionsDocument23 pagesUnderstanding Welding Symbols Terms and DefinitionsseymaPas encore d'évaluation
- Aluminium SpecificationDocument4 pagesAluminium Specificationpavan_joshi_5Pas encore d'évaluation
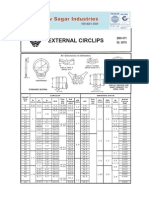
- Circlip Design PDFDocument6 pagesCirclip Design PDFpavan_joshi_5Pas encore d'évaluation
- Astm D610 PDFDocument6 pagesAstm D610 PDFAmbarPas encore d'évaluation
- Socket Set Screw SizeDocument2 pagesSocket Set Screw Sizepavan_joshi_5Pas encore d'évaluation
- Delrin 100P NC010Document4 pagesDelrin 100P NC010Keshav JhanwarPas encore d'évaluation
- Technical Notehowmanythreads PDFDocument4 pagesTechnical Notehowmanythreads PDFGatyo GatevPas encore d'évaluation
- 8.mech - IJME - Fluid - Flow - Nitin v. SatputeDocument10 pages8.mech - IJME - Fluid - Flow - Nitin v. Satputeiaset123Pas encore d'évaluation
- GD&TDocument7 pagesGD&Tpavan_joshi_5Pas encore d'évaluation
- Astm D 714 PDFDocument5 pagesAstm D 714 PDFpavan_joshi_550% (4)
- GD&TDocument26 pagesGD&Tpavan_joshi_5Pas encore d'évaluation
- GD&TDocument19 pagesGD&Tpavan_joshi_5Pas encore d'évaluation
- Technical Notehowmanythreads PDFDocument4 pagesTechnical Notehowmanythreads PDFGatyo GatevPas encore d'évaluation
- Press Information: New Product With World-First Front Fork Technology Released at EICMA 2014Document3 pagesPress Information: New Product With World-First Front Fork Technology Released at EICMA 2014pavan_joshi_5Pas encore d'évaluation
- GD&TDocument17 pagesGD&Tpavan_joshi_5Pas encore d'évaluation
- Metric Set ScrewDocument1 pageMetric Set Screwpavan_joshi_5Pas encore d'évaluation
- Section 2: Early System vs. G.D.&T. SystemDocument6 pagesSection 2: Early System vs. G.D.&T. Systempavan_joshi_5Pas encore d'évaluation
- Helpful Hints 2Document68 pagesHelpful Hints 2Uygur Zeren100% (5)
- Retaining Ring DesignDocument3 pagesRetaining Ring Designpavan_joshi_5Pas encore d'évaluation
- CFDDocument36 pagesCFDpavan_joshi_5Pas encore d'évaluation
- A-Type Circlip Detail PDFDocument2 pagesA-Type Circlip Detail PDFsunildhimankumarPas encore d'évaluation
- Explanation of Surface RoughnessDocument8 pagesExplanation of Surface RoughnessN.Palaniappan100% (6)
- Smalley RingsDocument6 pagesSmalley RingsjPas encore d'évaluation
- Delrin 100P NC010Document4 pagesDelrin 100P NC010Keshav JhanwarPas encore d'évaluation