Vous aimerez peut-être aussi
- Telephone Directory: Telephone Exchange Indian Institute of Technology Roorkee ROORKEE - 247 667 June - 2017Document72 pagesTelephone Directory: Telephone Exchange Indian Institute of Technology Roorkee ROORKEE - 247 667 June - 2017Raveendhra IitrPas encore d'évaluation
- Design of A Single-Switch DC-DC Converter For PV-Battery Powered Pump SystemDocument6 pagesDesign of A Single-Switch DC-DC Converter For PV-Battery Powered Pump SystemRaveendhra IitrPas encore d'évaluation
- Bi-Directional Fonvard-Flyback DC-DC Converter: IEEE PowerDocument4 pagesBi-Directional Fonvard-Flyback DC-DC Converter: IEEE PowerRaveendhra IitrPas encore d'évaluation
- A New Single Switch Buck-Boost Type DC-DC ConverterDocument4 pagesA New Single Switch Buck-Boost Type DC-DC ConverterRaveendhra IitrPas encore d'évaluation
- High Power Topology: "AlbacomDocument7 pagesHigh Power Topology: "AlbacomRaveendhra IitrPas encore d'évaluation
- Synthesis and Analysis of A Multiple-Input Parallel SC DC-DC ConverterDocument4 pagesSynthesis and Analysis of A Multiple-Input Parallel SC DC-DC ConverterRaveendhra IitrPas encore d'évaluation
- High Performance DC-DC Converter For Wide Voltage Range OperationDocument8 pagesHigh Performance DC-DC Converter For Wide Voltage Range OperationRaveendhra IitrPas encore d'évaluation
- Two-Loop Voltage-Mode Control of Coupled Inductor Step-Down Buck ConverterDocument9 pagesTwo-Loop Voltage-Mode Control of Coupled Inductor Step-Down Buck ConverterRaveendhra IitrPas encore d'évaluation
- 0628-1 Course MinhCTaDocument1 page0628-1 Course MinhCTaRaveendhra IitrPas encore d'évaluation
- Digital Two-Loop Controller Design For Fourth Order Split-Inductor ConverterDocument6 pagesDigital Two-Loop Controller Design For Fourth Order Split-Inductor ConverterRaveendhra IitrPas encore d'évaluation
- Design of Robust Digital PID Controller For H-Bridge Soft-Switching Boost ConverterDocument15 pagesDesign of Robust Digital PID Controller For H-Bridge Soft-Switching Boost ConverterRaveendhra IitrPas encore d'évaluation
- Based Power Tracking For Nonlinear PV SourcesDocument8 pagesBased Power Tracking For Nonlinear PV SourcesRaveendhra IitrPas encore d'évaluation
- Maximum Power Point Tracking of Coupled Interleaved Boost Converter Supplied SystemDocument10 pagesMaximum Power Point Tracking of Coupled Interleaved Boost Converter Supplied SystemRaveendhra IitrPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Sensores AvDocument12 pagesSensores Avhb CorpPas encore d'évaluation
- Design Standards For Sanitary Sewer SysytemDocument5 pagesDesign Standards For Sanitary Sewer SysytemJoselle RuizPas encore d'évaluation
- Dataproducts - LZR 1260 Laser Printer (1989)Document6 pagesDataproducts - LZR 1260 Laser Printer (1989)Bobby ChippingPas encore d'évaluation
- 2014 Summer Model Answer PaperDocument20 pages2014 Summer Model Answer Papercivil gpkpPas encore d'évaluation
- Hayward Super II Pump Model SP3005X7 ManualDocument14 pagesHayward Super II Pump Model SP3005X7 ManualhsmerkelPas encore d'évaluation
- E3 - 5.5.3 - PTAct Troubleshooting Spanning Tree ProtocolDocument2 pagesE3 - 5.5.3 - PTAct Troubleshooting Spanning Tree ProtocolIvandiPas encore d'évaluation
- SFF 8448Document8 pagesSFF 8448eleptonPas encore d'évaluation
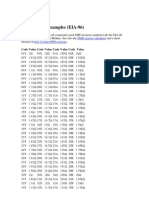
- SMD Resistor ExamplesDocument5 pagesSMD Resistor Examplesmarcbuss100% (1)
- RAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50TDocument3 pagesRAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50THidayat SyamsiPas encore d'évaluation
- Light Object DSP Controller Setup GuideDocument20 pagesLight Object DSP Controller Setup Guideblondu0070% (1)
- Dimitrios Iliadelis - Effect of Deep Excavation On An Adjacent Pile FoundationDocument77 pagesDimitrios Iliadelis - Effect of Deep Excavation On An Adjacent Pile Foundationmateus456Pas encore d'évaluation
- AY 2015-16cvbbnjDocument245 pagesAY 2015-16cvbbnjSyed Abdul AzizPas encore d'évaluation
- No35-Inclined Roof SystemDocument24 pagesNo35-Inclined Roof SystemKitanovic NenadPas encore d'évaluation
- Maison À BordeauxDocument5 pagesMaison À BordeauxSpam TestPas encore d'évaluation
- Calibration of The Calorimeter and HessDocument7 pagesCalibration of The Calorimeter and HessazirPas encore d'évaluation
- Mix Design Practice For Bituminous MixDocument49 pagesMix Design Practice For Bituminous MixAshwani KesharwaniPas encore d'évaluation
- RDSL 993K Z4D - Z4ZDocument11 pagesRDSL 993K Z4D - Z4ZDAnielPas encore d'évaluation
- Pre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationDocument3 pagesPre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationEugenio Jr. MatesPas encore d'évaluation
- Sop For LP Pump (R1)Document6 pagesSop For LP Pump (R1)SonratPas encore d'évaluation
- Nickel-Titanium Alloys: A Systematic Review: Original ArticleDocument12 pagesNickel-Titanium Alloys: A Systematic Review: Original ArticleMudavath BaburamPas encore d'évaluation
- Product Catalogue: Your Specialist in Flow DrillingDocument64 pagesProduct Catalogue: Your Specialist in Flow DrillingВасяPas encore d'évaluation
- WPH02 01 Que 20150604Document28 pagesWPH02 01 Que 20150604ArniePas encore d'évaluation
- Practical Considerations For The Use of A Howland Current SourceDocument4 pagesPractical Considerations For The Use of A Howland Current SourceRamiShaabannnnPas encore d'évaluation
- Specific Gravity 20mmDocument4 pagesSpecific Gravity 20mmIsaiahogedaPas encore d'évaluation
- VNX Unified Storage ManagementDocument3 pagesVNX Unified Storage ManagementNicolePas encore d'évaluation
- Assignment 1Document4 pagesAssignment 1MikeyPas encore d'évaluation
- Cfw300 Manual 1Document124 pagesCfw300 Manual 1maurilioPas encore d'évaluation
- 592-A2GA DesbloqueadoDocument27 pages592-A2GA DesbloqueadoVicktor GranadosPas encore d'évaluation
- Add A Thermometer To Your Digital Multimeter - Embedded LabDocument13 pagesAdd A Thermometer To Your Digital Multimeter - Embedded LabGourmand OishiiPas encore d'évaluation
- Clutch ListDocument42 pagesClutch ListAnkan MitraPas encore d'évaluation