Vous aimerez peut-être aussi
- Rail ResistanceDocument14 pagesRail Resistancehalf2liferPas encore d'évaluation
- VSD Paper Ictam 2000Document16 pagesVSD Paper Ictam 2000riyyo2424Pas encore d'évaluation
- Esfuerzo TractivoDocument6 pagesEsfuerzo Tractivoboy_scouttPas encore d'évaluation
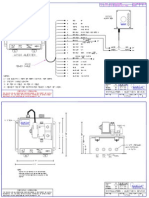
- C2518d AlerterDocument2 pagesC2518d Alerterboy_scouttPas encore d'évaluation
- IronPython Calculator FillableDocument2 pagesIronPython Calculator Fillableboy_scouttPas encore d'évaluation
- 15 - How Important Is Sequence in A TaskDocument2 pages15 - How Important Is Sequence in A Taskboy_scouttPas encore d'évaluation
- Formula Davis - AremaDocument4 pagesFormula Davis - Aremaboy_scouttPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- BS3974 Pipe SupportsDocument20 pagesBS3974 Pipe SupportsTony100% (1)
- Absolute-Pressure Sensors: Micromechanics, Hybrid DesignDocument3 pagesAbsolute-Pressure Sensors: Micromechanics, Hybrid Designc20get100% (2)
- Review of Antenna Designs for India's Regional Navigation Satellite SystemDocument9 pagesReview of Antenna Designs for India's Regional Navigation Satellite SystemkhyatichavdaPas encore d'évaluation
- 1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of BeamsDocument8 pages1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of Beamsabir ratulPas encore d'évaluation
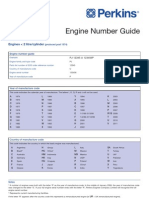
- Perkins Engine Number Guide PP827Document6 pagesPerkins Engine Number Guide PP827Muthu Manikandan100% (1)
- RtosDocument78 pagesRtossekinPas encore d'évaluation
- Sample Problem 3.4Document13 pagesSample Problem 3.4Emerson Ipiales GudiñoPas encore d'évaluation
- Course Handout SADocument9 pagesCourse Handout SAValiveti KumariPas encore d'évaluation
- SiliconeSurfactants SILTECHDocument6 pagesSiliconeSurfactants SILTECHA MahmoodPas encore d'évaluation
- Process Modeling Approach for Evaluating Biodiesel ProductionDocument18 pagesProcess Modeling Approach for Evaluating Biodiesel ProductionSereneTan18_KLPas encore d'évaluation
- Corrosion Types and Prevention Methods in 40 CharactersDocument75 pagesCorrosion Types and Prevention Methods in 40 CharactersCipri Croitor0% (1)
- Selden Keel Boat v1 LmarineriggingDocument72 pagesSelden Keel Boat v1 LmarinerigginglmarinegroupPas encore d'évaluation
- 01 - Introduction To Aircraft DrawingDocument33 pages01 - Introduction To Aircraft Drawing14Muhammad Abdur RakhmanPas encore d'évaluation
- White Paper c11 737101Document13 pagesWhite Paper c11 737101Aleksandar PopovicPas encore d'évaluation
- GaAs solar cell modeling improves efficiencyDocument4 pagesGaAs solar cell modeling improves efficiencyTarak BenslimanePas encore d'évaluation
- Geotech Final ReportDocument38 pagesGeotech Final Reportapi-320590292Pas encore d'évaluation
- Household Electricity End-Use ConsumptionDocument22 pagesHousehold Electricity End-Use ConsumptionEva ViskadourakiPas encore d'évaluation
- Astm B187Document9 pagesAstm B187Plata Elpidio100% (3)
- Main Engine Fuel Pump Drive Roller Damage: Return To TOCDocument2 pagesMain Engine Fuel Pump Drive Roller Damage: Return To TOCTunaPas encore d'évaluation
- LDRDocument4 pagesLDRRaymond ValdezPas encore d'évaluation
- 4E Roadmap for Energy Efficient Electric Motors and Motor SystemsDocument30 pages4E Roadmap for Energy Efficient Electric Motors and Motor SystemsCarlos LopezPas encore d'évaluation
- INA FAG Water Pump BearingsDocument31 pagesINA FAG Water Pump Bearings2bjornPas encore d'évaluation
- Mosquito RepellentDocument6 pagesMosquito RepellentJai MurugeshPas encore d'évaluation
- Home water pressure booster pumpDocument3 pagesHome water pressure booster pumpbadaasaabPas encore d'évaluation
- Technical Data Demag Hoist Units Volume 2: Double-Rail Crab EZDH 600 - EZDH 1000 Double-Rail Crab EZLDH 600 - EZLDH 2000Document88 pagesTechnical Data Demag Hoist Units Volume 2: Double-Rail Crab EZDH 600 - EZDH 1000 Double-Rail Crab EZLDH 600 - EZLDH 2000mohammad khoraminiaPas encore d'évaluation
- 6T40 45 Diag FixesDocument69 pages6T40 45 Diag Fixesjosue100% (12)
- OMEGA AIR Alternative Filter Elements English PDFDocument56 pagesOMEGA AIR Alternative Filter Elements English PDFbinhleduc36Pas encore d'évaluation
- Install bladder tanks under homesDocument4 pagesInstall bladder tanks under homessauro100% (1)
- Geotech Civ150 CompressDocument4 pagesGeotech Civ150 CompressismaeelPas encore d'évaluation
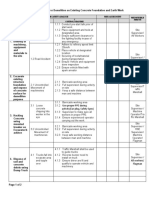
- ULSADO-JSA-Demolation Existing Concrete FoundationDocument2 pagesULSADO-JSA-Demolation Existing Concrete FoundationKelvin Tan75% (4)