
Vous aimerez peut-être aussi
- Calculus FormulaDocument2 pagesCalculus FormulaleeshiPas encore d'évaluation
- Exam - 2011 10 28Document5 pagesExam - 2011 10 28lieth-4Pas encore d'évaluation
- Multivariable Calculus, 2007-03-15. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 pagesMultivariable Calculus, 2007-03-15. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4Pas encore d'évaluation
- Essential FormulasDocument7 pagesEssential FormulasShinigami01001Pas encore d'évaluation
- Tcu12 CRC SinglegDocument2 pagesTcu12 CRC SinglegTyler BienhoffPas encore d'évaluation
- Target Iit-Jee: Paper - IDocument10 pagesTarget Iit-Jee: Paper - IPritam RoyPas encore d'évaluation
- Multivariable calculus exam with 7 problemsDocument5 pagesMultivariable calculus exam with 7 problemslieth-4Pas encore d'évaluation
- Math Stats Booklet 1Document20 pagesMath Stats Booklet 1Koh Boon HaoPas encore d'évaluation
- AP Calc AB/BC Review SheetDocument2 pagesAP Calc AB/BC Review Sheetmhayolo69100% (1)
- List MF9: MATHEMATICS (8709, 9709) Higher Mathematics (8719) STATISTICS (0390)Document8 pagesList MF9: MATHEMATICS (8709, 9709) Higher Mathematics (8719) STATISTICS (0390)Muhammad FarhanPas encore d'évaluation
- Coplex Number FormulasDocument7 pagesCoplex Number FormulasMohan KhedkarPas encore d'évaluation
- Math 20C NotesDocument2 pagesMath 20C NotesLolhiTherePas encore d'évaluation
- Calculus vectoriel et dérivéesDocument20 pagesCalculus vectoriel et dérivéesKevin Molina100% (1)
- Actual Formula Test #1 Test #2 FormulaDocument11 pagesActual Formula Test #1 Test #2 Formulanirakaru123Pas encore d'évaluation
- B + C - 2bc Cos A: Cosine RuleDocument13 pagesB + C - 2bc Cos A: Cosine RuleInvincy JYPas encore d'évaluation
- Info Booklet, Revised 2011Document27 pagesInfo Booklet, Revised 2011ordinancePas encore d'évaluation
- Math ReveiwDocument3 pagesMath ReveiwApache_mooPas encore d'évaluation
- Calculus BookletDocument6 pagesCalculus Bookletangie81Pas encore d'évaluation
- Multivariable calculus practice problems and formulasDocument5 pagesMultivariable calculus practice problems and formulaslieth-4Pas encore d'évaluation
- Correspondence Course For Iit-JeeDocument9 pagesCorrespondence Course For Iit-JeeApex InstitutePas encore d'évaluation
- LEGENDRE POLYNOMIALSDocument6 pagesLEGENDRE POLYNOMIALSFrancis Jr CastroPas encore d'évaluation
- Ma1505 CheatDocument4 pagesMa1505 CheatSouseiseki ChromePas encore d'évaluation
- H2 Mathematics Cheat Sheet by Sean LimDocument27 pagesH2 Mathematics Cheat Sheet by Sean LimGale HawthornePas encore d'évaluation
- AIEEE Mock Solved: Sol. (A) Sol. (B)Document7 pagesAIEEE Mock Solved: Sol. (A) Sol. (B)kishangopi123Pas encore d'évaluation
- Pham Thi Thanh Dung - M13609: VectorsDocument5 pagesPham Thi Thanh Dung - M13609: VectorsDzung PhamPas encore d'évaluation
- Basic (1) MathDocument2 pagesBasic (1) MathIan KrebsPas encore d'évaluation
- Formulario: L Ogica Matem AticaDocument10 pagesFormulario: L Ogica Matem AticaDaniel ChuquipomaPas encore d'évaluation
- Exam - 2012 10 30Document5 pagesExam - 2012 10 30lieth-4Pas encore d'évaluation
- Essential formulae for Number and AlgebraDocument16 pagesEssential formulae for Number and AlgebraMaruthappan Sundaram100% (1)
- Calculus 2 SummaryDocument2 pagesCalculus 2 Summarydukefvr41Pas encore d'évaluation
- Appendix: Physical Constants and Mathematical RelationsDocument9 pagesAppendix: Physical Constants and Mathematical RelationsMarta HenriquesPas encore d'évaluation
- Maths FormulaDocument4 pagesMaths Formulamickey_disney93Pas encore d'évaluation
- Rumus Matematika Sma InterDocument19 pagesRumus Matematika Sma InterAde JayusPas encore d'évaluation
- Calculus Cheat Sheet IntegralsDocument5 pagesCalculus Cheat Sheet Integralsapi-322359712Pas encore d'évaluation
- Advanced Calculus Formulas GuideDocument13 pagesAdvanced Calculus Formulas Guidevignes011Pas encore d'évaluation
- Mathematics exam questions on vectors, matrices, calculus and probabilityDocument7 pagesMathematics exam questions on vectors, matrices, calculus and probabilityRajkumarPas encore d'évaluation
- BasicsDocument2 pagesBasicsmadcow_scribdPas encore d'évaluation
- Formula SheetDocument3 pagesFormula SheetHussain JiffryPas encore d'évaluation
- Vector CalculusDocument108 pagesVector CalculusHani Barjok100% (1)
- Basic Formulas and Rules for Derivatives and IntegralsDocument4 pagesBasic Formulas and Rules for Derivatives and IntegralsAkshay Singh RajputPas encore d'évaluation
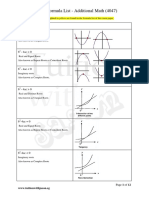
- Add Maths Formulae ListDocument8 pagesAdd Maths Formulae ListWong Hui SeanPas encore d'évaluation
- MATH39001 - Combinatorics and Graph Theory - Exam - Jan-2011Document8 pagesMATH39001 - Combinatorics and Graph Theory - Exam - Jan-2011scribd6289Pas encore d'évaluation
- A-Math Formula List - Additional Math (4047) Updated 6th Apr 2015 PDFDocument12 pagesA-Math Formula List - Additional Math (4047) Updated 6th Apr 2015 PDFilluminatehPas encore d'évaluation
- Form 5 Additional Maths NoteDocument10 pagesForm 5 Additional Maths NoteEric WongPas encore d'évaluation
- Bitsat Practice PapersDocument5 pagesBitsat Practice PapersNickazaz1Pas encore d'évaluation
- Formula Sheet - New Zealand Level 3 Calculus (2009)Document4 pagesFormula Sheet - New Zealand Level 3 Calculus (2009)naedkcinPas encore d'évaluation
- Narayana Grand Test - 8Document12 pagesNarayana Grand Test - 8Meet ShahPas encore d'évaluation
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesD'EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesPas encore d'évaluation
- Mathematical Tables: Tables of in G [z] for Complex ArgumentD'EverandMathematical Tables: Tables of in G [z] for Complex ArgumentPas encore d'évaluation
- Analytic Geometry: Graphic Solutions Using Matlab LanguageD'EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguagePas encore d'évaluation
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsD'EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsÉvaluation : 5 sur 5 étoiles5/5 (1)
- A-level Maths Revision: Cheeky Revision ShortcutsD'EverandA-level Maths Revision: Cheeky Revision ShortcutsÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Tables of Weber Functions: Mathematical Tables, Vol. 1D'EverandTables of Weber Functions: Mathematical Tables, Vol. 1Pas encore d'évaluation
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27D'EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Pas encore d'évaluation
- PythagorasDocument1 pagePythagorasRuijia ZengPas encore d'évaluation
- DocumentDocument3 pagesDocumentRuijia ZengPas encore d'évaluation
- Unit 9 - 25 Jan PDFDocument2 pagesUnit 9 - 25 Jan PDFRuijia ZengPas encore d'évaluation
- Activity 9.1: What Makes A Bad Presentation and What Makes A Good Presentation?Document2 pagesActivity 9.1: What Makes A Bad Presentation and What Makes A Good Presentation?Ruijia ZengPas encore d'évaluation
- Where To Start (A Quick Guide To GEM Explorer) - 141015Document14 pagesWhere To Start (A Quick Guide To GEM Explorer) - 141015Ruijia ZengPas encore d'évaluation
- HW0188 Engineering Communication I Video ResourcesDocument2 pagesHW0188 Engineering Communication I Video ResourcesRuijia ZengPas encore d'évaluation
- Where To Start (A Quick Guide To GEM Explorer) - 141015Document14 pagesWhere To Start (A Quick Guide To GEM Explorer) - 141015Ruijia ZengPas encore d'évaluation
- When You Apply (A Quick Guide To GEM Explorer)Document16 pagesWhen You Apply (A Quick Guide To GEM Explorer)Ruijia ZengPas encore d'évaluation
- How To Win A Spot (A Quick Guide To GEM Explorer)Document13 pagesHow To Win A Spot (A Quick Guide To GEM Explorer)Ruijia ZengPas encore d'évaluation
- Documents for UA ApplicationDocument2 pagesDocuments for UA ApplicationRuijia ZengPas encore d'évaluation
- EvlDocument4 pagesEvlRuijia ZengPas encore d'évaluation
- EvlDocument4 pagesEvlRuijia ZengPas encore d'évaluation
- HE9091 Jul 2016 Tutorial 6.student VersionDocument2 pagesHE9091 Jul 2016 Tutorial 6.student VersionRuijia ZengPas encore d'évaluation
- What Do Family Caregivers of Alzheimer's Disease Patients Desire in Smart Home Technologiesalzheimer's Disease Citation 1Document17 pagesWhat Do Family Caregivers of Alzheimer's Disease Patients Desire in Smart Home Technologiesalzheimer's Disease Citation 1Ruijia ZengPas encore d'évaluation
- 1419Document17 pages1419dawnparkPas encore d'évaluation
- ABBRDocument2 pagesABBRRuijia ZengPas encore d'évaluation
- Moe TGDocument1 pageMoe TGRuijia ZengPas encore d'évaluation
- HE9091 Course Outline July Semester 2016Document4 pagesHE9091 Course Outline July Semester 2016Ruijia ZengPas encore d'évaluation
- A-LEVEL SUBJECT SYNOPSESDocument22 pagesA-LEVEL SUBJECT SYNOPSESRuijia ZengPas encore d'évaluation
- Circe Sorceress Goddess Transforms Odysseus CompanionsDocument3 pagesCirce Sorceress Goddess Transforms Odysseus CompanionsRuijia ZengPas encore d'évaluation
- IMO Problems 2013Document2 pagesIMO Problems 2013Adithya GaneshPas encore d'évaluation
- 2012 H3 Game Theory Application FormDocument5 pages2012 H3 Game Theory Application FormRuijia ZengPas encore d'évaluation
- Presentation 1Document2 pagesPresentation 1Ruijia ZengPas encore d'évaluation
- DocumentDocument1 pageDocumentRuijia ZengPas encore d'évaluation
- Lio JXDocument1 pageLio JXRuijia ZengPas encore d'évaluation
- ST in Prodigies of The Maths UniverseDocument1 pageST in Prodigies of The Maths UniverseRuijia ZengPas encore d'évaluation
- Guide To Oxford InterviewsDocument12 pagesGuide To Oxford InterviewsRuijia ZengPas encore d'évaluation
- ZRJ EomDocument4 pagesZRJ EomRuijia ZengPas encore d'évaluation
- PeriodicbwDocument1 pagePeriodicbwMoraish SukumaranPas encore d'évaluation


















































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)


































