Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- PID ControllerDocument17 pagesPID Controlleradetag0% (1)
- Literary Trans PDFDocument116 pagesLiterary Trans PDFkltm azzPas encore d'évaluation
- UX AbstarctDocument3 pagesUX Abstarctjescobar010Pas encore d'évaluation
- Art:10 1023/B:BUSI 000002dasdadd0869 42655 f4Document10 pagesArt:10 1023/B:BUSI 000002dasdadd0869 42655 f4jescobar010Pas encore d'évaluation
- 1 s2.0 S1090513811001012 MainjhkhhDocument10 pages1 s2.0 S1090513811001012 Mainjhkhhjescobar010Pas encore d'évaluation
- Journal of Economic Behavior & OrganizationDocument16 pagesJournal of Economic Behavior & Organizationjescobar010Pas encore d'évaluation
- 1 s2.0 S0191886910005040 MainwtewtwetDocument5 pages1 s2.0 S0191886910005040 Mainwtewtwetjescobar010Pas encore d'évaluation
- Journal of Economic Behavior & OrganizationDocument16 pagesJournal of Economic Behavior & Organizationjescobar010Pas encore d'évaluation
- 1 s2.0 S002001901000058X Main PDFDocument7 pages1 s2.0 S002001901000058X Main PDFjescobar010Pas encore d'évaluation
- Dilema PrisioDocument6 pagesDilema Prisiojescobar010Pas encore d'évaluation
- Hard ChoicesDocument3 pagesHard Choicesjescobar010Pas encore d'évaluation
- NMNMNMNMMNDocument1 pageNMNMNMNMMNjescobar010Pas encore d'évaluation
- Neural Network Artificial Immune System For Malicious Code DetectionDocument7 pagesNeural Network Artificial Immune System For Malicious Code Detectionjescobar010Pas encore d'évaluation
- WRT54G2-EU LA UgDocument312 pagesWRT54G2-EU LA UglogoiPas encore d'évaluation
- Vast Data Comparing File Systems White PaperDocument5 pagesVast Data Comparing File Systems White PaperNs sPas encore d'évaluation
- Expert System Expert SystemsDocument3 pagesExpert System Expert SystemsBeyaPas encore d'évaluation
- A Controller Design For Servo Control System Using Different TechniquesDocument8 pagesA Controller Design For Servo Control System Using Different TechniquesKOKOPas encore d'évaluation
- Chapter II Intelligent AgentsDocument50 pagesChapter II Intelligent AgentsblackhatPas encore d'évaluation
- 2 Days AI Deep Learning WorkshopDocument9 pages2 Days AI Deep Learning WorkshopUsha KrishnaPas encore d'évaluation
- Interpersonal & Intrapersonal CommunicationDocument20 pagesInterpersonal & Intrapersonal CommunicationCharlene CathrinePas encore d'évaluation
- Cybs2122 Introduction To Artificial Intelligence Week 10Document5 pagesCybs2122 Introduction To Artificial Intelligence Week 10prij469Pas encore d'évaluation
- Chapter 14Document56 pagesChapter 14washma.zubairPas encore d'évaluation
- Non-Verbal and Verbal ComDocument31 pagesNon-Verbal and Verbal ComJune RanolaPas encore d'évaluation
- ECS171: Machine Learning: Lecture 1: Overview of Class, LFD 1.1, 1.2Document29 pagesECS171: Machine Learning: Lecture 1: Overview of Class, LFD 1.1, 1.2svwnerlgwrPas encore d'évaluation
- Swapandeep Kaur 1910941059 Research Paper 8Document28 pagesSwapandeep Kaur 1910941059 Research Paper 8Swapandeep KaurPas encore d'évaluation
- Object Detection and Pose Estimation Pipelines ComparisonDocument7 pagesObject Detection and Pose Estimation Pipelines ComparisonDyuman AdityaPas encore d'évaluation
- Mobile Robot Path Tracking Using A Robust PID ControllerDocument6 pagesMobile Robot Path Tracking Using A Robust PID ControllerNguyễnĐạtPas encore d'évaluation
- Top 20 AI Research Labs in The World in 2021Document9 pagesTop 20 AI Research Labs in The World in 2021analytics insightPas encore d'évaluation
- Aet304 - KQB KtuqbankDocument9 pagesAet304 - KQB KtuqbankNandu JagguPas encore d'évaluation
- Project PresentationDocument24 pagesProject PresentationYashwant KakiPas encore d'évaluation
- AI Powers Autonomous VehiclesDocument6 pagesAI Powers Autonomous VehiclesDurga KPas encore d'évaluation
- PID Tuning Assignment: Sir Dr. Ali MughalDocument7 pagesPID Tuning Assignment: Sir Dr. Ali MughalHaseeb TariqPas encore d'évaluation
- City Hotel Has The Highest No of Cancellations at 280Document5 pagesCity Hotel Has The Highest No of Cancellations at 280RYAN FERNANDESPas encore d'évaluation
- 09b Cassandra SlidesDocument26 pages09b Cassandra SlidesSandraPereraPas encore d'évaluation
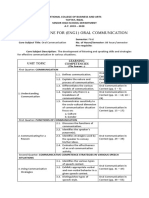
- Course Outline For (Eng1) Oral Communication: (The Learner )Document2 pagesCourse Outline For (Eng1) Oral Communication: (The Learner )Chloie AsajarPas encore d'évaluation
- Fuzzy LogicDocument6 pagesFuzzy LogiclokheshdonPas encore d'évaluation
- School of Communication: SEMESTER 1 - 2020/2021 YSK 501 Advanced Communication TheoryDocument28 pagesSchool of Communication: SEMESTER 1 - 2020/2021 YSK 501 Advanced Communication Theoryasma1705Pas encore d'évaluation
- Advantages and Disadvantages of Stochastic Gradient Descent - AsqueroDocument4 pagesAdvantages and Disadvantages of Stochastic Gradient Descent - AsqueroERINA FIKA NOVIANIPas encore d'évaluation
- CNN Basics and Techniques ExplainedDocument19 pagesCNN Basics and Techniques Explainedseul alonePas encore d'évaluation
- MEC 412 Experiment 5 Lab ManualDocument3 pagesMEC 412 Experiment 5 Lab ManualAnas OmarPas encore d'évaluation
- Deep Learning NotesDocument14 pagesDeep Learning NotesbadalrkcocPas encore d'évaluation
- Representing Knowledge Rules Declaratively ProcedurallyDocument10 pagesRepresenting Knowledge Rules Declaratively ProcedurallysarojPas encore d'évaluation