Vous aimerez peut-être aussi
- Exam 1 PDFDocument1 pageExam 1 PDFAugusto De La Cruz CamayoPas encore d'évaluation
- Chemical Engineering Plant Cost Index, 1950 To 2015Document1 pageChemical Engineering Plant Cost Index, 1950 To 2015Bianchi Benavides0% (1)
- 13 Problem Solving With MATLAB PDFDocument64 pages13 Problem Solving With MATLAB PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 2 Array and Matrix Operations PDFDocument39 pages2 Array and Matrix Operations PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 14 Advanced Techniques in Problem Solving PDFDocument58 pages14 Advanced Techniques in Problem Solving PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 6 Linear Algebraic Equations PDFDocument68 pages6 Linear Algebraic Equations PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 10 Simulink PDFDocument32 pages10 Simulink PDFAugusto De La Cruz Camayo100% (1)
- Mid (Solution) PDFDocument6 pagesMid (Solution) PDFAugusto De La Cruz CamayoPas encore d'évaluation
- MATLAB and Its Application - Final 2009 - 1 - 14 - PDFDocument2 pagesMATLAB and Its Application - Final 2009 - 1 - 14 - PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 12 Regression and Correlation of Data PDFDocument123 pages12 Regression and Correlation of Data PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 13 Problem Solving With MATLAB PDFDocument64 pages13 Problem Solving With MATLAB PDFAugusto De La Cruz CamayoPas encore d'évaluation
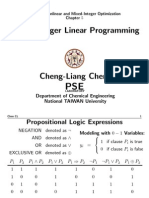
- 8 Mixed-Integer Linear Programming PDFDocument70 pages8 Mixed-Integer Linear Programming PDFAugusto De La Cruz CamayoPas encore d'évaluation
- Exam1 (Solution) PDFDocument6 pagesExam1 (Solution) PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 11 Basic Principles and CalculationsDocument64 pages11 Basic Principles and CalculationsJue RasepPas encore d'évaluation
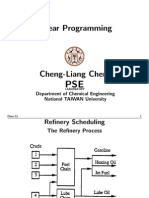
- 4 Linear Programming PDFDocument202 pages4 Linear Programming PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 6 Programming With MATLAB PDFDocument66 pages6 Programming With MATLAB PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 7 Linear Algebraic Equations PDFDocument69 pages7 Linear Algebraic Equations PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 1 An Overview of MATLAB PDFDocument54 pages1 An Overview of MATLAB PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 3 Commands-Based MATLAB Plotting PDFDocument27 pages3 Commands-Based MATLAB Plotting PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 4 Array and Matrix Operations PDFDocument65 pages4 Array and Matrix Operations PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 6 Numerical Methods For Constrained Optimization PDFDocument137 pages6 Numerical Methods For Constrained Optimization PDFAugusto De La Cruz Camayo100% (1)
- 11 Synthesis of Heat Exchanger Networks PDFDocument54 pages11 Synthesis of Heat Exchanger Networks PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 0 Engineering Programming Using MATLAB PDFDocument26 pages0 Engineering Programming Using MATLAB PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 5 Functions and Files PDFDocument35 pages5 Functions and Files PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 5 Numerical Methods For Unconstrained Optimization PDFDocument95 pages5 Numerical Methods For Unconstrained Optimization PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 9 Process Synthesis PDFDocument33 pages9 Process Synthesis PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 7 Optimum Design With MATLAB PDFDocument13 pages7 Optimum Design With MATLAB PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 1 Introduction To Optimum Design PDFDocument15 pages1 Introduction To Optimum Design PDFAugusto De La Cruz CamayoPas encore d'évaluation
- 2 Optimum Design Problem Formulation PDFDocument49 pages2 Optimum Design Problem Formulation PDFAugusto De La Cruz CamayoPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hotel Clarks Avadh - Sales PromotionDocument69 pagesHotel Clarks Avadh - Sales PromotionSujay Vikram Singh0% (1)
- Chapter 13Document57 pagesChapter 13Harish MurariPas encore d'évaluation
- CIE Session 2007 Beijing China - Paper Number PO 503Document4 pagesCIE Session 2007 Beijing China - Paper Number PO 503marili_matPas encore d'évaluation
- Of K-Pop Fandom (Yia, 2012), Media Dependency TheoryDocument23 pagesOf K-Pop Fandom (Yia, 2012), Media Dependency TheoryJoseph Lorenzo Acosta CerilloPas encore d'évaluation
- On Pooling of Central and State Sample Data of Nss 69throundDocument22 pagesOn Pooling of Central and State Sample Data of Nss 69throundJohana VangchhiaPas encore d'évaluation
- Module 1 QuanDocument22 pagesModule 1 QuanjackblackPas encore d'évaluation
- 0735633117752453Document25 pages0735633117752453Bathmasree NagendraraoPas encore d'évaluation
- Research Proposal For Radiant LeathersDocument5 pagesResearch Proposal For Radiant LeathersMadhaviPas encore d'évaluation
- ADKDocument17 pagesADKSepfira ReztikaPas encore d'évaluation
- Pargat's Project On Swaraj Project On MarketingDocument55 pagesPargat's Project On Swaraj Project On MarketingDeep S Mandeep100% (1)
- Solutions To Practice Problems For Week 3 PDFDocument3 pagesSolutions To Practice Problems For Week 3 PDFAshfaque FardinPas encore d'évaluation
- The Less Americans Know About Ukraine's Location, The More They Want U.S. To InterveneDocument3 pagesThe Less Americans Know About Ukraine's Location, The More They Want U.S. To InterveneThavamPas encore d'évaluation
- KCL Masters Dissertation HandbookDocument4 pagesKCL Masters Dissertation HandbookHelpWritingAPaperManchester100% (2)
- Performance Appraisal and KRA SettingDocument3 pagesPerformance Appraisal and KRA SettingpaulPas encore d'évaluation
- Impacts of Family Protection Support in The Intervention of Child Protection in The Practice of Social WorkDocument9 pagesImpacts of Family Protection Support in The Intervention of Child Protection in The Practice of Social Workdennielyn caminadePas encore d'évaluation
- Research PaperDocument33 pagesResearch PaperSaida Pagayao100% (1)
- Evolution of Regression - Ols To Gps To Mars SF MeetupDocument66 pagesEvolution of Regression - Ols To Gps To Mars SF MeetupVolodjaPas encore d'évaluation
- Bloom's Verb PDFDocument10 pagesBloom's Verb PDFzakwanramli100% (1)
- Operations Management: Chapter 3 - ForecastingDocument97 pagesOperations Management: Chapter 3 - ForecastingRohtash Singh RathorePas encore d'évaluation
- Questionnaire EntrepreneurshipDocument6 pagesQuestionnaire EntrepreneurshipShah SuzanePas encore d'évaluation
- Asia Crisis & Security Group 2010 Annual Compensation SurveyDocument33 pagesAsia Crisis & Security Group 2010 Annual Compensation SurveyAlvinMatabangPas encore d'évaluation
- Five Ingredients For An Employee Retention Formula (Special Report On Recruitment & Retention)Document4 pagesFive Ingredients For An Employee Retention Formula (Special Report On Recruitment & Retention)Ramadansach SachruddinPas encore d'évaluation
- Analysis and Fact-Finding Using SMARTDocument4 pagesAnalysis and Fact-Finding Using SMARTMatthew ThiessenPas encore d'évaluation
- ESS8 Data Documentation Report E02 2Document190 pagesESS8 Data Documentation Report E02 2Guillem RicoPas encore d'évaluation
- Marketing AnalyticsDocument27 pagesMarketing AnalyticsSwostik RoutPas encore d'évaluation
- Iw38 Case StudyDocument2 pagesIw38 Case StudySreekar ReddyPas encore d'évaluation
- Physics 3 May 2007Document12 pagesPhysics 3 May 2007Sheena ShahPas encore d'évaluation
- Sri Handaru Yuliati Business Plan 3 Faculty Economics and Business Universitas Gadjah MadDocument25 pagesSri Handaru Yuliati Business Plan 3 Faculty Economics and Business Universitas Gadjah MadAfifah KhairunaPas encore d'évaluation
- ISTE JournalDocument16 pagesISTE JournalShahrizal Mohamad IsharPas encore d'évaluation