Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Difference Between RISC and CISC ArchitectureDocument2 pagesDifference Between RISC and CISC ArchitectureakssahaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- TrheeDocument3 pagesTrheearrofiqPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- FS9721 LP3-DS-21 en PDFDocument39 pagesFS9721 LP3-DS-21 en PDFMaiChiVuPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Novo MaticDocument1 pageNovo MaticHaitsam MaulanaPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Counter Path X-Lite SIP Compatibility Report (Ver4.0)Document6 pagesCounter Path X-Lite SIP Compatibility Report (Ver4.0)TheChemist1357Pas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Hayward - 3 Way Valve IOM Manual PDFDocument2 pagesHayward - 3 Way Valve IOM Manual PDFBenjamin MillerPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Sepam Series 80 UndervoltageDocument3 pagesSepam Series 80 Undervoltagedinakaran2020Pas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- BatteriesDocument2 pagesBatteriesMujahid SukarnoPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Auto Salaah Timetable - 01Document4 pagesAuto Salaah Timetable - 01AmirPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Book Shop System in C++Document29 pagesBook Shop System in C++vickyverma100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Exceed and SSHClient For Remote AccessDocument12 pagesExceed and SSHClient For Remote AccessDeepakKumarPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Trygg-Hansa Dumpmaster: Quick PresentationDocument65 pagesTrygg-Hansa Dumpmaster: Quick PresentationjeffthomasPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Mechanical Engineering BtechDocument20 pagesMechanical Engineering BtechShreeyansh AggarwalPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- CUDA Threads and Block SchedulingDocument9 pagesCUDA Threads and Block SchedulingDisinlung Kamei DisinlungPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Advantages of DBMS: Controlling Data RedundancyDocument2 pagesAdvantages of DBMS: Controlling Data RedundancyAamir SayyedPas encore d'évaluation
- SCADADocument2 pagesSCADAbiswa217Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Unit 1 - Lab 1-FlowchartDocument6 pagesUnit 1 - Lab 1-FlowchartSon DavidPas encore d'évaluation
- Bill of Quantity: Baner Lifespaces LLPDocument7 pagesBill of Quantity: Baner Lifespaces LLPSales AlufacadesPas encore d'évaluation
- CS 2354 - Advanced Computer Architecture PDFDocument2 pagesCS 2354 - Advanced Computer Architecture PDFvelkarthi92100% (1)
- 1159 To 11510 UpgradeDocument16 pages1159 To 11510 UpgradeMabu DbaPas encore d'évaluation
- Ncp-Mci-5.15 Exam Dump From JulieDocument63 pagesNcp-Mci-5.15 Exam Dump From JulieDev BosePas encore d'évaluation
- Resume Prayat Anil Hegde - Firmware - Embedded - Systems - EngineerDocument3 pagesResume Prayat Anil Hegde - Firmware - Embedded - Systems - EngineerPrayat Anil HegdePas encore d'évaluation
- Weka TutorialDocument8 pagesWeka TutorialVairavasundaram VairamPas encore d'évaluation
- Pub088 001 00 - 0515Document16 pagesPub088 001 00 - 0515Lorenzo GabrielliPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- SBHS1Document5 pagesSBHS1Rahul PancholiPas encore d'évaluation
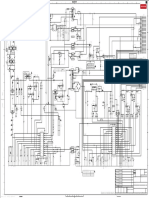
- G2Le Board Schematic Diagram (55") : Stby FBDocument1 pageG2Le Board Schematic Diagram (55") : Stby FBAntonio CalabresePas encore d'évaluation
- MOperador SY215C Serie HO6898 - Crawler Hydraulic ExcavatorDocument435 pagesMOperador SY215C Serie HO6898 - Crawler Hydraulic ExcavatorRojasDura.100% (5)
- Ibm Toolscenter Bootable Media Creator Installation and User'S GuideDocument72 pagesIbm Toolscenter Bootable Media Creator Installation and User'S GuideHarry SunrizePas encore d'évaluation
- Notebook Computer Notebook Computer W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W249BUQ W249BUQ Service ManualDocument5 pagesNotebook Computer Notebook Computer W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W249BUQ W249BUQ Service ManualTiago da Silva PereiraPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- 229 - Flir - P660 - 01Document2 pages229 - Flir - P660 - 01Williams MedinaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)