Vous aimerez peut-être aussi
- The Advanced Geometry of Plane Curves and Their ApplicationsD'EverandThe Advanced Geometry of Plane Curves and Their ApplicationsPas encore d'évaluation
- Anchor ForceDocument14 pagesAnchor ForceAdi Mulyadi100% (1)
- Mathematical Fairing of Ship's Lines For Mold Loft Layout - Robert Taggart 1955Document21 pagesMathematical Fairing of Ship's Lines For Mold Loft Layout - Robert Taggart 1955Fernando Raúl LADINOPas encore d'évaluation
- A Course of Mathematics for Engineers and ScientistsD'EverandA Course of Mathematics for Engineers and ScientistsPas encore d'évaluation
- Calculation of Potential Flow Around An Elliptic Cylinder Using Boundary Element MethodDocument15 pagesCalculation of Potential Flow Around An Elliptic Cylinder Using Boundary Element MethodDoğancan UzunPas encore d'évaluation
- Prediction of Afflux at Bridge Constrictions Using A Depth Averaged Numerical ModelDocument10 pagesPrediction of Afflux at Bridge Constrictions Using A Depth Averaged Numerical ModelriteshreplyPas encore d'évaluation
- An Extension of Casson's Invariant. (AM-126), Volume 126D'EverandAn Extension of Casson's Invariant. (AM-126), Volume 126Pas encore d'évaluation
- An Arc Spline Approximation To A ClothoidDocument19 pagesAn Arc Spline Approximation To A Clothoidom3roPas encore d'évaluation
- Great Circle and Sailings ProblemsDocument23 pagesGreat Circle and Sailings ProblemsArman Pineda50% (2)
- The Surprise Attack in Mathematical ProblemsD'EverandThe Surprise Attack in Mathematical ProblemsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Research On The Shape Optimization of Three-DimensionalDocument6 pagesResearch On The Shape Optimization of Three-DimensionalSyed Sadik Siddique ShouvikPas encore d'évaluation
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionD'EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionPas encore d'évaluation
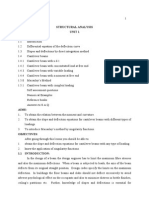
- Structural AnalysisDocument256 pagesStructural AnalysisDong-Yong KimPas encore d'évaluation
- 3D Modeling of Nonlinear Wave Phenomena on Shallow Water SurfacesD'Everand3D Modeling of Nonlinear Wave Phenomena on Shallow Water SurfacesPas encore d'évaluation
- Ellis 1982Document14 pagesEllis 1982yaseen90azizPas encore d'évaluation
- The Saint Louis Gateway ArchDocument8 pagesThe Saint Louis Gateway ArchJose Antonio Domínguez GonzálezPas encore d'évaluation
- Development of Pippard's Elastic Method For The Assessment of Short Span Masonry Arch BridgesDocument8 pagesDevelopment of Pippard's Elastic Method For The Assessment of Short Span Masonry Arch BridgesjdkelleyPas encore d'évaluation
- Azisebwip PDFDocument5 pagesAzisebwip PDFhamidaffandyPas encore d'évaluation
- FossenDocument21 pagesFossenEgwuatu UchennaPas encore d'évaluation
- The Longitudinal Strength Analysis of Aquaculture Floating Structure in Indonesia Sea WaterDocument8 pagesThe Longitudinal Strength Analysis of Aquaculture Floating Structure in Indonesia Sea WaterTJPRC PublicationsPas encore d'évaluation
- Chapter Two: 9. Flood RoutingDocument19 pagesChapter Two: 9. Flood RoutingAbdulkarim AliPas encore d'évaluation
- More Maximumminimum Problems. Reflection and RefractionDocument6 pagesMore Maximumminimum Problems. Reflection and RefractionRaul Humberto Mora VillamizarPas encore d'évaluation
- Effect of Coupled Heave Pitch Motion On A Vessel Moving in Regular Water WaysDocument13 pagesEffect of Coupled Heave Pitch Motion On A Vessel Moving in Regular Water WaysJohn joi100% (1)
- Crystal Planes and Miller IndicesDocument12 pagesCrystal Planes and Miller IndicesUpender DhullPas encore d'évaluation
- Cive162001 2006 Brief SolutionsDocument7 pagesCive162001 2006 Brief Solutionssjeyarajah21Pas encore d'évaluation
- Wednesday 11 June 2014 - Afternoon: A2 Gce Physics B (Advancing Physics)Document13 pagesWednesday 11 June 2014 - Afternoon: A2 Gce Physics B (Advancing Physics)Diaa Dibs WazaitPas encore d'évaluation
- MIT OCW Wave Propagation Lecture Part 5Document22 pagesMIT OCW Wave Propagation Lecture Part 5Mohan NayakaPas encore d'évaluation
- Simpsons Rule NotesDocument3 pagesSimpsons Rule NotesSherwin Bonsol Arevalo100% (1)
- Ogee Spillway DesignDocument25 pagesOgee Spillway DesignEr Harsh Mahajan88% (32)
- Simulation of Shoreline Change Behind A Submerged Permeable BreakwaterDocument10 pagesSimulation of Shoreline Change Behind A Submerged Permeable BreakwaterSantosh KoriPas encore d'évaluation
- The Analysis of The Global Ship Strengths in Vertical Plane With 3D-Fem Hull ModelsDocument22 pagesThe Analysis of The Global Ship Strengths in Vertical Plane With 3D-Fem Hull ModelsMihaela NidelcuPas encore d'évaluation
- CFDLV15 N11 P67 78Document12 pagesCFDLV15 N11 P67 78mabm89Pas encore d'évaluation
- An Integrated Tool For Concept and FinalDocument15 pagesAn Integrated Tool For Concept and FinaljasserjederPas encore d'évaluation
- Deflection of BeamsDocument41 pagesDeflection of BeamsMubaaracq Meerasahib100% (3)
- Deflections of BeamsDocument41 pagesDeflections of Beamsaap1100% (2)
- NSEP Solved Paper 2008Document11 pagesNSEP Solved Paper 2008ShubhamKhannaPas encore d'évaluation
- Generalization of Belanger EquationDocument8 pagesGeneralization of Belanger EquationAndro Manuel MauricioPas encore d'évaluation
- Sun, J. 2012. Hull Form DesignDocument10 pagesSun, J. 2012. Hull Form DesignManuel Esteban MercadoPas encore d'évaluation
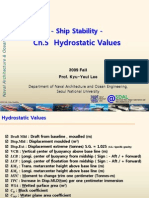
- Ch.5 Hydrostatic Values: - Ship StabilityDocument22 pagesCh.5 Hydrostatic Values: - Ship StabilityRENGANATHAN PPas encore d'évaluation
- Cmo 94007 FuDocument9 pagesCmo 94007 FuHrithin TPas encore d'évaluation
- MME09MM 1101numerical Related To CrystallographyDocument53 pagesMME09MM 1101numerical Related To CrystallographyMaria PhiriPas encore d'évaluation
- Optimization of The Box Section of The Main Girders of The BridgeDocument9 pagesOptimization of The Box Section of The Main Girders of The BridgeramiPas encore d'évaluation
- CE 3205 Lecture W5.1 Flood RoutingDocument83 pagesCE 3205 Lecture W5.1 Flood RoutingSyukran RazakPas encore d'évaluation
- Numerical Simulation of Flow Around The Ship Using CFD MethodDocument12 pagesNumerical Simulation of Flow Around The Ship Using CFD MethodNguyen Van QuyenPas encore d'évaluation
- Surfaces Family With Common Smarandache Geodesic Curve According To Bishop Frame in Euclidean SpaceDocument11 pagesSurfaces Family With Common Smarandache Geodesic Curve According To Bishop Frame in Euclidean SpaceMia AmaliaPas encore d'évaluation
- Mimetic Discretization of Differential OperatorDocument11 pagesMimetic Discretization of Differential OperatorMd Hasan AnsariPas encore d'évaluation
- 8863 Chapter 2Document8 pages8863 Chapter 2enjeePas encore d'évaluation
- Influence of Damping On The Roll Motion of Ships: Emre Pesman, Deniz Bayraktar and Metin TAYLANDocument8 pagesInfluence of Damping On The Roll Motion of Ships: Emre Pesman, Deniz Bayraktar and Metin TAYLANSabrinaFuschettoPas encore d'évaluation
- SatOrb ReportV1Document13 pagesSatOrb ReportV1João JúniorPas encore d'évaluation
- Shape Optimization of An Autonomous Underwater Vehicle With A Ducted Propeller Using Computational Fluid Dynamics AnalysisDocument13 pagesShape Optimization of An Autonomous Underwater Vehicle With A Ducted Propeller Using Computational Fluid Dynamics AnalysishanstiwariPas encore d'évaluation
- Steady Flow Along A Rankine Half-BodyDocument7 pagesSteady Flow Along A Rankine Half-BodyTubaguts1234Pas encore d'évaluation
- Numerical Study of Dispersion and Nonlinearity Effects On Tsunami PropagationDocument13 pagesNumerical Study of Dispersion and Nonlinearity Effects On Tsunami PropagationYassir ArafatPas encore d'évaluation
- MST326 202109Document8 pagesMST326 202109llynusPas encore d'évaluation
- Conformal Mapping in Hydrodynamic: C. Ciobanu, M. Caţă, A. R. AnghelDocument11 pagesConformal Mapping in Hydrodynamic: C. Ciobanu, M. Caţă, A. R. AnghelhossamPas encore d'évaluation
- Tamm States: (D /DX), m8 (V (X) - ) /HDocument17 pagesTamm States: (D /DX), m8 (V (X) - ) /HRyan BaliliPas encore d'évaluation
- 2019-Investigation of Coriolis Effect On Oceanic Flows and Its Bifurcation Via Geophysical Korteweg-de-Vries EquationDocument21 pages2019-Investigation of Coriolis Effect On Oceanic Flows and Its Bifurcation Via Geophysical Korteweg-de-Vries EquationAndrés Oswaldo Rivera HérnandezPas encore d'évaluation
- Assignment IDocument3 pagesAssignment IS. Shreeman reddyPas encore d'évaluation
- Detailed Schedule: Structure (7 Weeks)Document2 pagesDetailed Schedule: Structure (7 Weeks)Jon Arnold GreyPas encore d'évaluation
- Introduction To The Theory of Neural ComputationDocument18 pagesIntroduction To The Theory of Neural ComputationJon Arnold GreyPas encore d'évaluation
- The Hopfield Model - Emin Orhan - 2014 PDFDocument11 pagesThe Hopfield Model - Emin Orhan - 2014 PDFJon Arnold GreyPas encore d'évaluation
- Ex1 2017 1Document2 pagesEx1 2017 1Jon Arnold GreyPas encore d'évaluation
- The Hopfield Model - S. Seung MITDocument6 pagesThe Hopfield Model - S. Seung MITJon Arnold GreyPas encore d'évaluation
- PMRes 2016 4Document145 pagesPMRes 2016 4Jon Arnold GreyPas encore d'évaluation
- Fuentes 2005Document10 pagesFuentes 2005Jon Arnold GreyPas encore d'évaluation
- PMRes 2017 Special1 PDFDocument241 pagesPMRes 2017 Special1 PDFJon Arnold GreyPas encore d'évaluation
- 4.4. Response Amplitude Operators: M M M MDocument1 page4.4. Response Amplitude Operators: M M M MJon Arnold GreyPas encore d'évaluation
- BF 00888416Document2 pagesBF 00888416Jon Arnold GreyPas encore d'évaluation
- Cyrano de BergeracDocument209 pagesCyrano de BergeracKayleePas encore d'évaluation
- Finding Roots of Equations Bracketing MethodsDocument11 pagesFinding Roots of Equations Bracketing MethodsmebrahtenPas encore d'évaluation
- PPG ReviewerDocument8 pagesPPG Reviewerryanbaldoria.immensity.ictPas encore d'évaluation
- Norman 2017Document7 pagesNorman 2017Lee HaeunPas encore d'évaluation
- Test A NN4 2020-2021Document2 pagesTest A NN4 2020-2021Toska GilliesPas encore d'évaluation
- Total Recall and SkepticismDocument4 pagesTotal Recall and Skepticismdweiss99Pas encore d'évaluation
- Modbus Manual TD80 PDFDocument34 pagesModbus Manual TD80 PDFAmar ChavanPas encore d'évaluation
- Caisley, Robert - KissingDocument53 pagesCaisley, Robert - KissingColleen BrutonPas encore d'évaluation
- Breast Cancer ChemotherapyDocument7 pagesBreast Cancer Chemotherapydini kusmaharaniPas encore d'évaluation
- 3658 - Implement Load BalancingDocument6 pages3658 - Implement Load BalancingDavid Hung NguyenPas encore d'évaluation
- Baby Brianna Andrew WaltersDocument14 pagesBaby Brianna Andrew WaltersBaby Brianna50% (2)
- Software Development Life CycleDocument70 pagesSoftware Development Life CycleChaitanya MalikPas encore d'évaluation
- Contract Law: Offer & Acceptance CasesDocument8 pagesContract Law: Offer & Acceptance CasesAudrey JongPas encore d'évaluation
- Activity 2Document2 pagesActivity 2cesar jimenezPas encore d'évaluation
- Massage Format..Document2 pagesMassage Format..Anahita Malhan100% (2)
- ECON 4035 - Excel GuideDocument13 pagesECON 4035 - Excel GuideRosario Rivera NegrónPas encore d'évaluation
- ch09 (POM)Document35 pagesch09 (POM)jayvee cahambingPas encore d'évaluation
- Why-Most Investors Are Mostly Wrong Most of The TimeDocument3 pagesWhy-Most Investors Are Mostly Wrong Most of The TimeBharat SahniPas encore d'évaluation
- Power System Planning Lec5aDocument15 pagesPower System Planning Lec5aJoyzaJaneJulaoSemillaPas encore d'évaluation
- Customer AnalysisDocument6 pagesCustomer AnalysisLina LambotPas encore d'évaluation
- Lesson Plan in Science III ObservationDocument2 pagesLesson Plan in Science III ObservationTrishaAnnSantiagoFidelPas encore d'évaluation
- Introduction To Professional School Counseling Advocacy Leadership and Intervention Ebook PDF VersionDocument62 pagesIntroduction To Professional School Counseling Advocacy Leadership and Intervention Ebook PDF Versionmary.krueger918100% (50)
- Singular & Plural Nouns: Regular PluralsDocument4 pagesSingular & Plural Nouns: Regular PluralsМарина ВетерPas encore d'évaluation
- CardiologyDocument83 pagesCardiologyAshutosh SinghPas encore d'évaluation
- (CTRL) The Finders' Keeper: An Interview With Marion PettieDocument10 pages(CTRL) The Finders' Keeper: An Interview With Marion PettieSolomanTrismosin100% (2)
- Elements of Visual Design in The Landscape - 26.11.22Document15 pagesElements of Visual Design in The Landscape - 26.11.22Delnard OnchwatiPas encore d'évaluation
- MGMT 400-Strategic Business Management-Adnan ZahidDocument5 pagesMGMT 400-Strategic Business Management-Adnan ZahidWaleed AhmadPas encore d'évaluation
- Extraction of Non-Timber Forest Products in The PDFDocument18 pagesExtraction of Non-Timber Forest Products in The PDFRohit Kumar YadavPas encore d'évaluation
- Imam Zainul Abideen (RA) 'S Service To The Poor and DestituteDocument3 pagesImam Zainul Abideen (RA) 'S Service To The Poor and DestituteShoyab11Pas encore d'évaluation
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseD'EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseÉvaluation : 3.5 sur 5 étoiles3.5/5 (69)
- The Other End of the Leash: Why We Do What We Do Around DogsD'EverandThe Other End of the Leash: Why We Do What We Do Around DogsÉvaluation : 5 sur 5 étoiles5/5 (65)
- The Lives of Bees: The Untold Story of the Honey Bee in the WildD'EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildÉvaluation : 4.5 sur 5 étoiles4.5/5 (44)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessD'EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessPas encore d'évaluation
- Spoiled Rotten America: Outrages of Everyday LifeD'EverandSpoiled Rotten America: Outrages of Everyday LifeÉvaluation : 3 sur 5 étoiles3/5 (19)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionD'EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionÉvaluation : 4 sur 5 étoiles4/5 (812)
- The Best American Science And Nature Writing 2021D'EverandThe Best American Science And Nature Writing 2021Évaluation : 4 sur 5 étoiles4/5 (8)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorD'EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorÉvaluation : 4.5 sur 5 étoiles4.5/5 (137)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsD'EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsÉvaluation : 3.5 sur 5 étoiles3.5/5 (13)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldD'EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldÉvaluation : 4 sur 5 étoiles4/5 (597)
- Fire Season: Field Notes from a Wilderness LookoutD'EverandFire Season: Field Notes from a Wilderness LookoutÉvaluation : 4 sur 5 étoiles4/5 (142)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingD'EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingÉvaluation : 5 sur 5 étoiles5/5 (5)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsD'EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsÉvaluation : 4 sur 5 étoiles4/5 (223)
- Come Back, Como: Winning the Heart of a Reluctant DogD'EverandCome Back, Como: Winning the Heart of a Reluctant DogÉvaluation : 3.5 sur 5 étoiles3.5/5 (10)
- Remnants of Ancient Life: The New Science of Old FossilsD'EverandRemnants of Ancient Life: The New Science of Old FossilsÉvaluation : 3 sur 5 étoiles3/5 (3)
- Darwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignD'EverandDarwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignÉvaluation : 4 sur 5 étoiles4/5 (19)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldD'EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (18)
- The Mind of Plants: Narratives of Vegetal IntelligenceD'EverandThe Mind of Plants: Narratives of Vegetal IntelligenceÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingD'EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (35)
- The Hawk's Way: Encounters with Fierce BeautyD'EverandThe Hawk's Way: Encounters with Fierce BeautyÉvaluation : 4.5 sur 5 étoiles4.5/5 (19)