Académique Documents
Professionnel Documents
Culture Documents
Rossignoli-Naon-Santangelo - ECUACIONES DIFERENCIALES EN FISICA PDF
Transféré par
Elfi GarilloDescription originale:
Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Rossignoli-Naon-Santangelo - ECUACIONES DIFERENCIALES EN FISICA PDF
Transféré par
Elfi GarilloDroits d'auteur :
Formats disponibles
Ecuaciones Diferenciales en Fsica
Carlos Mara Na on, Ra ul Dante Rossignoli, Eve Mariel Santangelo
Departamento de Fsica - Facultad de Ciencias Exactas
Universidad Nacional de La Plata
Carlos Mara Na on
Dr. en Fsica (UNLP)
Profesor Titular
Universidad Nacional de La Plata
Investigador Principal CONICET
Ra ul Dante Rossignoli
Dr. en Fsica (UNLP)
Profesor Titular
Universidad Nacional de La Plata
Investigador Independiente CIC
Eve Mariel Sant angelo
Dra. en Fsica (UNLP)
Profesora Asociada
Universidad Nacional de La Plata
Investigadora Independiente CONICET
Dedicatoria
En recuerdo del Profesor Carlos Guido Bollini, cuyos Apuntes de Matem aticas Espe-
ciales II [1] ense naron a tantas generaciones de fsicos entre los cuales nos contamos los
autores del presente libro la teora de las ecuaciones diferenciales y sus aplicaciones.
I
Agradecimientos
A nuestras familias, que nos alentaron a escribir este libro y nos tuvieron tanta pacien-
cia mientras lo hacamos.
Anuestros profesores, colegas y alumnos del Departamento de Fsica y del Instituto de
Fsica La Plata, que enriquecieron el contenido de esta obra con sus ense nanzas, preguntas
y sugerencias.
Ala Universidad Nacional de La Plata, al Consejo Nacional de Investigaciones Cient-
cas y T ecnicas, y a la Comisi on de Investigaciones Cientcas de la Provincia de Buenos
Aires, que nos proveyeron la infraestructura y el apoyo nanciero indispensables para la
realizaci on, entre otros, del presente proyecto.
II
Pr ologo
Como su ttulo lo indica, este libro est a pensado como texto b asico para un primer
curso, de duraci on semestral, sobre Ecuaciones Diferenciales. Aunque algunos de sus
contenidos se han tomado de las Refs. [110], contiene numerosos aportes propios. En
efecto, est a basado en los apuntes de clase que los autores elaboramos durante los diversos
perodos en que tuvimos a cargo la asignatura Matem aticas Especiales II, correspondien-
te al tercer a no de la carrera de Licenciatura en Fsica de la Universidad Nacional de La
Plata. Por consiguiente, pone enfasis en aquellos aspectos que son de utilidad en la mode-
lizaci on y resoluci on de problemas que plantea dicha disciplina cientca. Por esta raz on,
entendemos que puede resultar igualmente util para cursos destinados a alumnos/as de
otras disciplinas directamente relacionadas con la Fsica, como la Ingeniera, las Ciencias
Astron omicas y Geofsicas. Al escribirlo, hemos dado por descontado que su lector/a ha
adquirido, previamente, una formaci on b asica sobre An alisis Matem atico en una y varias
variables reales y en variable compleja, as como sobre
Algebra y
Algebra Lineal.
Convencidos de que no se puede comprender profundamente la Fsica sin abordar se-
riamente el estudio de su principal herramienta, la Matem atica, hemos cuidado al m aximo
la rigurosidad. Por esa causa, damos la demostraci on de cada aseveraci on que la requiere,
con la sola excepci on de aquellos temas que corresponden a los contenidos de asignaturas
previas de Matem atica o que se demuestran m as naturalmente con herramientas que se
obtendr an en cursos posteriores.
El libro contiene numerosos ejemplos resueltos, destinados a consolidar la compren-
si on de los t opicos desarrollados, junto con 52 guras ilustrativas. Incluye, tambi en, un
buen n umero de ejercicios propuestos. Algunos de ellos apuntan a desarrollar en el/la
estudiante la capacidad de resolver ecuaciones diferenciales. Otros, est an destinados a
profundizar su dominio de la estructura matem atica asociada con el tema.
El breve captulo I contiene las deniciones b asicas e introduce las propiedades fun-
damentales de las ecuaciones diferenciales lineales. El captulo II se dedica al estudio
de las ecuaciones y sistemas de ecuaciones ordinarias, con enfasis en la resoluci on de
problemas de condiciones iniciales. En la secci on II.1 de este captulo, se detallan las
propiedades generales de este tipo de ecuaciones. En la secci on II.2 se enumeran t ecnicas
que permiten resolver algunos casos de f acil resoluci on, En la secci on II.3 se presentan
las generalidades de los problemas de condiciones iniciales, incluyendo el teorema de
existencia y unicidad de la soluci on (de Picard) para sistemas de primer orden con condi-
ciones iniciales. Tambi en se considera la reducci on de problemas de condiciones iniciales
para ecuaciones diferenciales de ordenes superiores a problemas de condiciones inicia-
les para sistemas de primer orden. En la secci on II.4 se estudia, en particular, el caso de
problemas iniciales para sistemas de ecuaciones ordinarias lineales de primer orden, po-
niendo especial enfasis en las t ecnicas basadas en el uso de la matriz fundamental (para
sistemas lineales homog eneos) y de la matriz de Green causal (para sistemas lineales in-
homog eneos). En la secci on II.5 se aborda el estudio de ecuaciones diferenciales lineales
III
de ordenes superiores con t ecnicas que no requieren su reducci on a sistemas de ecua-
ciones de primer orden. Finalmente, la secci on II.6 contiene una breve introducci on a la
Teora de Distribuciones y aplicaciones de tales conceptos a la denici on de matrices y
funciones de Green causales.
El captulo III est a reservado al estudio de problemas de condiciones de contorno para
ecuaciones diferenciales ordinarias. En la secci on III.1 de este captulo, se estudian los
problemas de Sturm-Liouville, tanto con coecientes analticos como con coecientes
singulares, los tipos de condiciones de contorno compatibles con el car acter autoadjunto
del correspondiente operador diferencial de segundo orden, los autovalores y autofun-
ciones de operadores de Sturm-Liouville, las correspondientes funciones de Green y sus
desarrollos en autofunciones. En la secci on III.2 se presenta la t ecnica de resoluci on de
ecuaciones lineales homog eneas mediante desarrollos en series de potencias, se introdu-
cen las funciones especiales de uso m as frecuente en Fsica y se examinan sus principales
propiedades.
En el captulo IV se estudian la serie de Fourier y algunas transformadas integrales.
La secci on IV.1 est a dedicada a la presentaci on de la serie de Fourier en sus diversas
variantes. En la secci on IV.2 se presenta la transformada integral de Fourier y se demues-
tran sus principales propiedades. Finalmente, en la secci on IV.3 se aborda el estudio de la
transformada integral de Laplace.
En el captulo V se consideran las ecuaciones diferenciales en derivadas parciales.
Luego de dar una breve introducci on al problema (secci on V.1), se aborda la clasica-
ci on de las ecuaciones diferenciales lineales de segundo orden con coecientes constan-
tes (secci on V.2). En la secci on V.3 se presenta el m etodo de separaci on de variables,
que se utilizar a a menudo en las secciones posteriores. La secci on V.4 se dedica al estu-
dio de la ecuaci on de propagaci on de ondas en una dimensi on espacial, paradigma de las
ecuaciones diferenciales lineales hiperb olicas. En la secci on V.5 se realiza el estudio de
la ecuaci on de difusi on en una dimensi on espacial, ejemplo principal de las ecuaciones
diferenciales lineales parab olicas. La secci on V.6 est a reservada al estudio de la ecuaci on
de Laplace, arquetipo de las ecuaciones diferenciales lineales elpticas y, sin duda, una de
las ecuaciones de m as frecuente aparici on en el planteo matem atico de problemas de la
Fsica. En la secci on V.7 se utilizan los conocimientos adquiridos en la secci on anterior
para resolver ecuaciones hiperb olicas y parab olicas en m as de una dimensi on espacial.
Finalmente, hemos querido terminar este libro, en el captulo VI, con una presenta-
ci on detallada de c omo el Principio de Hamilton, que desempe na un papel preponderante
en la Fsica, conduce a la obtenci on de ecuaciones diferenciales ordinarias, en el caso
de sistemas con un n umero nito de grados de libertad (secci on VI.1), y de ecuaciones
diferenciales en derivadas parciales, en el caso de sistemas continuos (secci on VI.2).
Los tres ap endices contienen material complementario adicional.
IV
Indice general
I Introducci on 1
I.1. Consideraciones generales . . . . . . . . . . . . . . . . . . . . . . . . . 3
I.2. Deniciones b asicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
I.3. Ecuaciones diferenciales lineales . . . . . . . . . . . . . . . . . . . . . . 6
I.4. Propiedades fundamentales de las ecuaciones diferenciales lineales . . . . 9
II Ecuaciones Diferenciales Ordinarias:
Generalidades y Problemas de Condiciones Iniciales 15
II.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
II.2. Ecuaciones de primer orden: Algunos casos de f acil resoluci on . . . . . . 17
II.2.1. Ecuaciones con variables separables . . . . . . . . . . . . . . . . 17
II.2.2. Ecuaciones reducibles a variables separables . . . . . . . . . . . 22
II.2.3. Ecuaciones en diferenciales totales. Factor integrante . . . . . . . 23
II.2.4. Ecuaciones diferenciales lineales de primer orden . . . . . . . . . 26
II.2.5. Ecuaciones reducibles a la forma lineal . . . . . . . . . . . . . . 29
II.3. Problemas de condiciones iniciales . . . . . . . . . . . . . . . . . . . . . 30
II.3.1. Teorema de existencia y unicidad de Picard para problemas de
valores iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
II.3.2. Generalizaci on a sistemas de ecuaciones de primer orden . . . . 39
II.3.3. Representaci on de una ecuaci on diferencial de orden n mediante
un sistema de primer orden . . . . . . . . . . . . . . . . . . . . . 40
II.3.4. Reducci on en uno del orden de una ecuaci on diferencial ordinaria 41
II.4. Sistemas de ecuaciones lineales de primer orden . . . . . . . . . . . . . 44
II.4.1. Resoluci on del caso homog eneo. Matriz fundamental . . . . . . . 45
II.4.2. Evoluci on del determinante . . . . . . . . . . . . . . . . . . . . 47
II.4.3. Resoluci on del caso no homog eneo. Matriz de Green . . . . . . . 48
II.4.4. Sistemas lineales con coecientes constantes . . . . . . . . . . . 50
II.4.5. Soluci on fundamental general en el caso constante . . . . . . . . 51
II.4.6. El caso diagonalizable . . . . . . . . . . . . . . . . . . . . . . . 53
II.4.7. Evaluaci on de exp[At] en el caso no diagonalizable . . . . . . . . 57
II.4.8. Exponencial en el caso A(t) variable . . . . . . . . . . . . . . . . 60
II.5. Ecuaciones diferenciales lineales de orden n . . . . . . . . . . . . . . . . 61
II.5.1. Caso de coecientes constantes . . . . . . . . . . . . . . . . . . 63
V
INDICE GENERAL
INDICE GENERAL
II.5.2. Ecuaci on diferencial lineal no homog enea de orden n . . . . . . 65
II.5.3. Ecuaci on de orden n no homog enea con coecientes constantes . 67
II.5.4. Ecuaci on diferencial lineal de segundo orden . . . . . . . . . . . 69
II.5.5. M etodo general para hallar la segunda soluci on de una ecuaci on
lineal homog enea de segundo orden . . . . . . . . . . . . . . . . 70
II.5.6. Ecuaci on lineal homog enea de segundo orden con coecientes
constantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
II.5.7. Ecuaci on lineal no homog enea de segundo orden. M etodo general
y m etodo de coecientes indeterminados . . . . . . . . . . . . . 73
II.6. Introducci on a la Teora de Distribuciones. Funci on de Green causal. . . . 80
II.6.1. La Delta de Dirac como lmite de una secuencia . . . . . . . . . . 80
II.6.2. Propiedades b asicas de la delta de Dirac . . . . . . . . . . . . . . 82
II.6.3. Funci on de Heaviside . . . . . . . . . . . . . . . . . . . . . . . . 84
II.6.4. Tratamiento formal. Teora de distribuciones . . . . . . . . . . . 85
II.6.5. Funci on de Green de ecuaciones lineales de primer orden . . . . . 87
II.6.6. Matriz de Green de sistemas lineales . . . . . . . . . . . . . . . . 88
II.6.7. Funci on de Green para la ecuaci on lineal de orden n . . . . . . . 90
III Ecuaciones Diferenciales Ordinarias:
Problemas con Condiciones de Contorno 97
III.1. El problema de Sturm-Liouville . . . . . . . . . . . . . . . . . . . . . . 99
III.1.1. Problemas de Sturm-Liouville no singulares . . . . . . . . . . . . 99
III.1.2. Tipos de condiciones de contorno . . . . . . . . . . . . . . . . . 100
III.1.3. Car acter autoadjunto del operador . . . . . . . . . . . . . . . . . 101
III.1.4. Funci on de Green para condiciones de contorno locales. Soluci on
del problema de borde con ecuaci on diferencial inhomog enea . . 103
III.1.5. Autovalores y autofunciones del operador de Sturm-Liouville no
singular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
III.1.6. Desarrollo de la funci on de Green en autofunciones. Tipos de con-
vergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
III.1.7. Problema variacional asociado y completitud . . . . . . . . . . . 114
III.2. Resoluci on de ecuaciones lineales homog eneas mediante series de poten-
cias. Funciones Especiales . . . . . . . . . . . . . . . . . . . . . . . . . 121
III.2.1. Caso de coecientes analticos . . . . . . . . . . . . . . . . . . . 121
III.2.2. Desarrollo alrededor de puntos singulares regulares . . . . . . . . 124
III.2.3. Propiedades de las soluciones de los problemas de Sturm-Liouville
singulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
III.2.4. Motivaci on del estudio de funciones especiales: problema de au-
tovalores para el operador laplaciano en una bola tridimensional . 129
III.2.5. Ecuaci on de Legendre . . . . . . . . . . . . . . . . . . . . . . . 130
III.2.6. Ecuaci on asociada de Legendre y arm onicos esf ericos . . . . . . 134
III.2.7. Ecuaci on de Bessel, funciones de Bessel y funci on Gamma . . . . 137
VI
INDICE GENERAL
INDICE GENERAL
III.2.8. Otras funciones especiales de utilidad en Fsica . . . . . . . . . . 142
III.2.9. Desarrollos en series de autofunciones de L (funciones especiales) 143
IV Serie y Transformada de Fourier 149
IV.1. Serie de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
IV.1.1. Coecientes de Fourier . . . . . . . . . . . . . . . . . . . . . . . 151
IV.1.2. Teoremas de Fourier sobre convergencia puntual . . . . . . . . . 152
IV.1.3. Otras formas de convergencia . . . . . . . . . . . . . . . . . . . 156
IV.1.4. Forma compleja del desarrollo . . . . . . . . . . . . . . . . . . . 157
IV.1.5. Serie de Fourier para otros intervalos de periodicidad . . . . . . . 157
IV.1.6. Desarrollos de medio rango. Series de senos y de cosenos . . . . 158
IV.1.7. Algunos ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . 158
IV.2. Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . 164
IV.2.1. Denici on y unicidad . . . . . . . . . . . . . . . . . . . . . . . . 164
IV.2.2. Propiedades b asicas de la transformada de Fourier . . . . . . . . 166
IV.2.3. Otras propiedades de la Transformada de Fourier . . . . . . . . . 167
IV.2.4. Algunas transformadas de Fourier utiles . . . . . . . . . . . . . . 168
IV.2.5. Desarrollos de medio rango: Transformadas seno y coseno . . . . 170
IV.2.6. Transformada de Fourier discreta . . . . . . . . . . . . . . . . . 170
IV.3. Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . 173
V Ecuaciones Diferenciales en Derivadas Parciales 177
V.1. Introducci on y deniciones . . . . . . . . . . . . . . . . . . . . . . . . . 179
V.2. Clasicaci on de ecuaciones lineales de segundo orden con coecientes
constantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
V.2.1. Ecuaciones en dos variables . . . . . . . . . . . . . . . . . . . . 181
V.2.2. Simetras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
V.2.3. Formulaci on general . . . . . . . . . . . . . . . . . . . . . . . . 185
V.3. El m etodo de separaci on de variables . . . . . . . . . . . . . . . . . . . 187
V.3.1. Consideraciones generales . . . . . . . . . . . . . . . . . . . . . 187
V.3.2. Autovalores y autofunciones de L
x
+ L
y
. . . . . . . . . . . . . 192
V.3.3. Autovalores y autofunciones de
1
(x)
L
x
+ g(x)L
y
. . . . . . . . . 193
V.4. Ondas en una dimensi on espacial . . . . . . . . . . . . . . . . . . . . . 196
V.4.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
V.4.2. Soluci on de DAlembert para la cuerda innita . . . . . . . . . . 197
V.4.2.1. Soluci on fundamental para la cuerda innita . . . . . . 198
V.4.2.2. Ecuaci on inhomog enea. Funci on de Green causal para
la cuerda innita . . . . . . . . . . . . . . . . . . . . . 200
V.4.3. Cuerda semi-innita con extremo jo . . . . . . . . . . . . . . . 201
V.4.4. Cuerda semi-innita con extremo libre . . . . . . . . . . . . . . . 206
V.4.5. Cuerda Finita: energa y condiciones de contorno . . . . . . . . . 207
VII
INDICE GENERAL
INDICE GENERAL
V.4.6. Cuerda Finita: Resoluci on por Separaci on de Variables . . . . . . 210
V.4.6.1. Cuerda nita con extremos jos . . . . . . . . . . . . . 211
V.4.6.2. Cuerda nita con extremos libres . . . . . . . . . . . . 213
V.4.6.3. Funci on de Green causal para una cuerda nita . . . . . 215
V.4.6.4. Condiciones de contorno inhomog eneas . . . . . . . . 216
V.4.6.5. Energa de la cuerda nita con extremos jos . . . . . . 217
V.5. Difusi on en una dimensi on espacial . . . . . . . . . . . . . . . . . . . . 218
V.5.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
V.5.2. Evoluci on de la temperatura en una barra innita . . . . . . . . . 219
V.5.3. Ecuaci on inhomog enea. Funci on de Green. . . . . . . . . . . . . 222
V.5.4. Barra semi-innita con condici on de contorno homog enea . . . . 222
V.5.5. Barra semi-innita con condiciones de contorno inhomog eneas . 224
V.5.5.1. Soluci on general . . . . . . . . . . . . . . . . . . . . . 224
V.5.5.2. Problemas sin condici on inicial y propagaci on de va-
riaciones peri odicas de temperatura en un extremo . . . 226
V.5.6. Teorema del m aximo y condiciones de contorno en barras de lon-
gitud nita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
V.5.7. Evoluci on de la temperatura en barras nitas . . . . . . . . . . . 231
V.6. Ecuaci on de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
V.6.1. Introducci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
V.6.2. Teorema del valor m aximo para la ecuaci on de Laplace . . . . . . 235
V.6.3. Condiciones de contorno para el operador de Laplace . . . . . . . 236
V.6.4. Funciones arm onicas en diversas geometras. El problema de Pois-
son . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
V.6.4.1. Arm onicos rectangulares . . . . . . . . . . . . . . . . 239
V.6.4.2. Problema del semiplano . . . . . . . . . . . . . . . . . 243
V.6.4.3. Arm onicos rectangulares en tres o m as dimensiones . . 245
V.6.4.4. Arm onicos circulares y soluci on de Poisson en el disco 246
V.6.4.5. Arm onicos esf ericos y soluci on de Poisson para la bola
tridimensional . . . . . . . . . . . . . . . . . . . . . . 250
V.6.4.6. Arm onicos cilndricos. Soluci on de Poisson en el cilindro256
V.6.5. M etodos de variable compleja para problemas bidimensionales . . 257
V.6.5.1. Soluci on de Poisson para el interior del disco: Obten-
ci on con m etodos de variable compleja . . . . . . . . . 258
V.6.5.2. Transformaciones conformes . . . . . . . . . . . . . . 259
V.6.6. Problemas de autovalores para el operador de Laplace . . . . . . 260
V.6.6.1. Propiedades generales . . . . . . . . . . . . . . . . . . 260
V.6.6.2. Autovalores del laplaciano en un rect angulo . . . . . . 262
V.6.6.3. Autovalores del laplaciano en un disco y en un cilindro 265
V.6.6.4. Autovalores del laplaciano en la bola tridimensional . . 267
V.6.7. Funci on de Green del Laplaciano . . . . . . . . . . . . . . . . . 269
V.6.7.1. Denici on y desarrollo en autofunciones para el pro-
blema de Dirichlet . . . . . . . . . . . . . . . . . . . . 269
VIII
INDICE GENERAL
INDICE GENERAL
V.6.7.2. Funciones de Green en dos, tres y n dimensiones . . . . 271
V.6.7.3. Funci on de Green para el semiplano . . . . . . . . . . 274
V.6.7.4. Funci on de Green para la bola y el disco . . . . . . . . 275
V.6.7.5. Funci on de Green para el problema de Neumann . . . . 277
V.6.7.6. Soluci on para el problema general de Dirichlet . . . . . 279
V.7. Ecuaciones hiperb olicas y parab olicas en mayores dimensiones espaciales 280
V.7.1. Ecuaci on hiperb olica en m as variables. Ondas y funci on de Green
en el espacio n-dimensional . . . . . . . . . . . . . . . . . . . . 280
V.7.2. Difusi on en el espacio n-dimensional. Funci on de Green de la
ecuaci on general de difusi on . . . . . . . . . . . . . . . . . . . . 284
VI A modo de eplogo: Ecuaciones de la Fsica Matem atica
a partir de un Principio Variacional 289
VI.1. Principio de Hamilton para sistemas con un n umero nito de grados de
libertad: ecuaciones diferenciales ordinarias . . . . . . . . . . . . . . . . 291
VI.2. Principio variacional para sistemas continuos: ecuaciones diferenciales a
derivadas parciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
Ap endices
A. Diagonalizaci on de matrices 301
B. Identidades de Green 305
C. Algunos desarrollos de la Funci on de Green en autofunciones 307
IX
INDICE GENERAL
INDICE GENERAL
X
Captulo I
Introducci on
1
I.1 CONSIDERACIONES GENERALES
I.1. Consideraciones generales
Al estudiar fen omenos fsicos, en general, se encuentran leyes que no vinculan entre
s a las magnitudes que caracterizan el fen omeno, sino que involucran relaciones entre
esas magnitudes y sus derivadas. As, se obtienen ecuaciones que contienen no s olo la
funci on inc ognita (escalar o vectorial) sino, adem as, una o m as derivadas de la misma.
Tales ecuaciones se llaman ecuaciones diferenciales, y su estudio ser a el objetivo principal
de este libro.
Un ejemplo b asico es la ley de desintegraci on radiactiva. Se sabe que el n umero de
n ucleos at omicos dN que decaen en un intervalo de tiempo peque no dt es proporcional
al n umero de n ucleos presentes N(t). Este hecho conduce a la relaci on
dN(t)
dt
= kN(t) , (I.1.1)
con k constante, que es una ecuaci on diferencial para N(t).
El segundo ejemplo que podemos mencionar es la Segunda ley de Newton para una
partcula de masa constante m que se mueve en una dimensi on espacial bajo la acci on de
una fuerza F. Si x denota la posici on de la partcula y la fuerza F depende del tiempo
t, de la posici on x y de la velocidad v = dx/dt de la partcula, la ley F = ma, con
a = d
2
x/dt
2
la aceleraci on de la partcula, conduce a
m
d
2
x
dt
2
= F(t, x,
dx
dt
) , (I.1.2)
que es una ecuaci on diferencial para la posici on en funci on del tiempo x(t).
En forma similar, para una partcula que se mueve en el espacio tridimensional, a
partir de la misma ley de movimiento se tiene
m
d
2
r
dt
2
= F(t, r,
dr
dt
) , (I.1.3)
donde el vector r(t), de componentes cartesianas x(t), y(t) y z(t), denota la posici on de
la partcula y el vector F(t, r,
dr
dt
) una fuerza dependiente del tiempo t, el vector posici on
r y el vector velocidad v = dr/dt. La ecuaci on (I.1.3) es, en realidad, un sistema de tres
ecuaciones diferenciales acopladas para x(t), y(t), z(t). En forma explcita,
_
_
_
m
d
2
x
dt
2
= F
x
(t, x, y, z,
dx
dt
,
dy
dt
,
dz
dt
)
m
d
2
y
dt
2
= F
y
(t, x, y, z,
dx
dt
,
dy
dt
,
dz
dt
)
m
d
2
z
dt
2
= F
z
(t, x, y, z,
dx
dt
,
dy
dt
,
dz
dt
)
(I.1.4)
Finalmente, otro ejemplo de ecuaci on diferencial es la ecuaci on de Laplace, que tra-
taremos en detalle m as adelante en este libro. Tal ecuaci on tiene una importancia fun-
damental en distintas areas de la Fsica. En coordenadas cartesianas, esta ecuaci on se
escribe:
x
2
+
2
y
2
+
2
z
2
= 0 , (I.1.5)
3
I.2 DEFINICIONES B
ASICAS
donde la funci on inc ognita depende ahora de tres variables x, y, z. La ecuaci on de
Laplace, a diferencia de los ejemplos anteriores, es una ecuaci on diferencial en derivadas
parciales.
Como veremos, esta ecuaci on surge en el planteo de distintos problemas fsicos. Por
ejemplo, puede representar el potencial electrost atico en ausencia de cargas, o tambi en
la temperatura estacionaria en un material conductor en ausencia de fuentes o sumideros
de calor, e incluso, si eliminamos la variable z, la altura de una membrana el astica tensa,
ja en los bordes, en situaci on estacionaria. Esta coincidencia no es infrecuente en Fsica:
fen omenos y magnitudes fsicas muy distintas pueden ser descriptas por una misma ecua-
ci on diferencial, dando lugar a analogas fsicas. S olo la interpretaci on (y las unidades!)
ser an distintas.
I.2. Deniciones b asicas
Denici on I.2.1 Una ecuaci on en la cual la funci on inc ognita aparece afectada por una
o m as derivadas se llama ecuaci on diferencial (e.d.).
Denici on I.2.2 Si, en la e.d., la funci on inc ognita es funci on de una sola variable (como
ocurre en (I.1.1), (I.1.2) y (I.1.3)), la e.d. se denomina ecuaci on diferencial ordinaria.
Una e.d. ordinaria puede escribirse como
F(t, u,
du
dt
,
d
2
u
dt
2
, . . .) = 0 , (I.2.1)
donde la inc ognita es la funci on u(t).
Denici on I.2.3 Si, en cambio, la funci on inc ognita es funci on de dos o m as variables
(como ocurre en (I.1.5)), la e.d. se denomina ecuaci on diferencial en derivadas parcia-
les. Por ejemplo, en el caso de dos variables, una ecuaci on de este tipo puede escribirse
como
F(x, y, u,
u
x
,
u
y
,
2
u
x
2
,
2
u
xy
,
2
u
y
2
, . . .) = 0 , (I.2.2)
donde la inc ognita es la funci on u(x
,
y).
En general, en Fsica, el estudio de sistemas con n umero nito de grados de libertad
conduce a ecuaciones diferenciales ordinarias (ver VI), mientras que el estudio de medios
continuos conduce a ecuaciones diferenciales en derivadas parciales.
Denici on I.2.4 Se llama orden de una e.d. al orden de la derivada de mayor orden de
la funci on inc ognita que gura en la ecuaci on. Por ejemplo, (I.1.1) es de orden uno, o de
primer orden, mientras que (I.1.2), (I.1.3) y (I.1.5) son de orden dos, o de segundo orden.
4
I.2 DEFINICIONES B
ASICAS
Una ecuaci on diferencial ordinaria de orden n puede, entonces, escribirse en la forma
general
F(t, u,
du
dt
, . . . ,
d
n
u
dt
n
) = 0 . (I.2.3)
La determinaci on de la funci on inc ognita es el problema fundamental que ataca la
teora de ecuaciones diferenciales.
Denici on I.2.5 Se llama soluci on de una e.d. a una funci on que, sustituida en la e.d., la
satisface.
Por ejemplo, N(t) = Ce
kt
, con C constante arbitraria, es soluci on de I.1.1. En
efecto,
dN(t)
dt
= Cke
kt
= kN(t) .
La constante arbitraria C queda determinada si se conoce N a un dado tiempo. Por
ejemplo, si
N(0) = N
0
, (I.2.4)
resulta C = N
0
, y se tiene N(t) = N
0
e
kt
.
La ecuaci on (I.1.1) y la condici on inicial (I.2.4) constituyen un problema de condi-
ciones iniciales.
Denici on I.2.6 El proceso de determinaci on de las soluciones de una e.d. se llama re-
soluci on o integraci on de la ecuaci on.
Tal proceso puede ser simple, como en el caso anterior pero, en general, se hace ne-
cesario utilizar m etodos aproximados, que suelen conducir a una integraci on num erica.
Otras veces, puede interesarnos conocer s olo ciertas propiedades de las soluciones, como
su comportamiento frente a peque nas variaciones de las condiciones iniciales (problemas
de estabilidad) o adquirir una idea gr aca de su comportamiento, gracando campos de
derivadas o curvas equipotenciales.
La resoluci on de una e.d. de orden n requiere n integraciones, con la consiguiente
aparici on de n constantes de integraci on. Surge, entonces, la siguiente denici on:
5
I.3 ECUACIONES DIFERENCIALES LINEALES
Denici on I.2.7 Una soluci on de la e.d. en que una o m as de esas n constantes toman un
valor particular se llama soluci on particular de la e.d.. La soluci on con las n constantes
indeterminadas se llama soluci on general de la e.d..
Como veremos durante el desarrollo de este libro, en los problemas de inter es fsico
se proveen, adem as de la (o las) ecuaciones diferenciales, ciertos datos o condiciones
complementarias que permiten determinar las constantes en la soluci on general. Tales
condiciones pueden ser de distintos tipos: condiciones de Cauchy (como ocurre en los
problemas de valores iniciales para ecuaciones o sistemas de ecuaciones diferenciales
que estudiaremos en primer lugar) o condiciones de contorno, como los que aparecer an
cuando consideremos el problema de Sturm-Liouville. En general, al resolver problemas
asociados con ecuaciones diferenciales en derivadas parciales, deber an imponerse tanto
condiciones iniciales como de contorno. En todos los casos, adoptaremos esta denici on,
debida a Jacques Hadamard [2]:
Denici on I.2.8 Un problema que involucra ecuaciones diferenciales se llama bien plan-
teado si:
1. Tiene soluci on.
2. Su soluci on es unica.
3. La soluci on depende de modo continuo de las condiciones complementarias y de
todos los par ametros del problema.
I.3. Ecuaciones diferenciales lineales
Un caso que merece sin duda especial consideraci on es el de las ecuaciones diferen-
ciales lineales. Estas desempe nan un papel fundamental en la Fsica. Tanto la ecuaci on
de Laplace (I.1.5), como la ecuaci on de Schr odinger de la Mec anica Cu antica y las ecua-
ciones de Maxwell del electromagnetismo (en su forma diferencial y en el vaco), son
ejemplos de ecuaciones o sistemas de ecuaciones diferenciales lineales.
Denici on I.3.1 Una ecuaci on diferencial es lineal si, en la ecuaci on (I.2.1) o (I.2.2), F
es una funci on lineal de la funci on inc ognita y todas sus derivadas (aunque no necesa-
riamente de la variable independiente).
As, para u escalar, la ecuaci on diferencial lineal ordinaria de orden n m as general
puede escribirse como
a
n
(t)
d
n
u
dt
n
+ a
n1
(t)
d
n1
u
dt
n1
+. . . + a
0
(t)u = f(t), a
n
(t) ,= 0 , (I.3.1)
6
I.3 ECUACIONES DIFERENCIALES LINEALES
donde los coecientes a
m
(t), m = 0, . . . , n son, en general funciones de t.
La ecuaci on (I.3.1) suele escribirse en la forma
L[u] = f(t), (I.3.2)
donde
L =
n
m=0
a
m
(t)
d
m
dt
m
(I.3.3)
es un operador diferencial lineal, es decir que, si c
1
y c
2
son constantes y u
1
(t), u
2
(t)
funciones n veces derivables,
L[c
1
u
1
(t) + c
2
u
2
(t)] = c
1
L[u
1
(t)] + c
2
L[u
2
(t)] . (I.3.4)
Esta propiedad dene la linealidad de L.
Denici on I.3.2 La ecuaci on diferencial lineal se denomina homog enea si f(t) = 0.
Esta es entonces de la forma
L[u] = 0
con L un operador diferencial lineal. Si f(t) ,= 0 la ecuaci on diferencial lineal se deno-
mina inhomog enea.
Un ejemplo simple de ecuaci on diferencial ordinaria lineal y homog enea es la ecuaci on
(I.1.1) de la desintegraci on radioactiva. La ecuaci on (I.1.2) ser a lineal s olo cuando la
fuerza F sea una funci on lineal de x y dx/dt (o de las componentes de r y dr/dt en
(I.1.3)). Por ejemplo, este es el caso de una partcula de masa m sujeta a un resorte de
constante k y sometida a una fuerza adicional que depende explcitamente del tiempo,
f(t). Considerando por simplicidad que se mueve en una dimensi on espacial, y denotando
ahora la posici on de la partcula por u(t), la correspondiente ecuaci on de movimiento es
m
d
2
u
dt
2
= ku + f(t)
que podemos escribir como
L[u] = f(t), L[u] = m
d
2
u
dt
2
+ku
donde L es claramente un operador lineal (a
2
(t) = m, a
1
(t) = 0, a
0
(t) = k en (I.3.1)).
Esta ecuaci on constituye por lo tanto una ecuaci on diferencial lineal ordinaria de segundo
orden. Ser a homog enea en el caso de fuerza externa nula (f(t) = 0). El agregado de una
fuerza de roce proporcional a la velocidad (F
r
=
du
dt
) no altera el car acter lineal de la
ecuaci on diferencial, aun si los par ametros m, k y dependen explcitamente del tiempo.
7
I.3 ECUACIONES DIFERENCIALES LINEALES
De manera an aloga, una ecuaci on diferencial lineal en derivadas parciales para una
funci on u escalar que dependa de dos variables x, y, es de la forma
a
0
u + a
x
u
x
+ a
y
u
y
+ a
xx
2
u
x
2
+ a
xy
2
u
xy
+ a
yy
2
u
y
2
+ . . . = f(x, y), (I.3.5)
donde todos los coecientes a
0
, a
x
, a
y
, a
xx
. . . pueden ser funciones de (x, y). Esta ecua-
ci on puede tambi en escribirse como
L[u] = f(x, y) ,
donde
L[u] = a
0
+ a
x
x
+a
y
u
y
+ a
xx
2
u
x
2
+ a
xy
2
u
xy
+ a
yy
2
u
y
2
+ . . . (I.3.6)
es un operador diferencial lineal: Si c
1
y c
2
son constantes y u
1
(x, y), u
2
(x, y) funciones
con derivadas parciales hasta el mayor orden que aparece en L, nuevamente
L[c
1
u
1
(x, y) +c
2
u
2
(x, y)] = c
1
L[u
1
(x, y)] + c
2
L[u
2
(x, y)] .
Como en el caso ordinario, la ecuaci on diferencial lineal en derivadas parciales se
denomina homog enea si f(x, y) = 0 e inhomog enea si f(x, y) ,= 0. La extensi on al caso
de tres o m as variables es inmediata.
La ecuaci on de Laplace (I.1.5) es un ejemplo de ecuaci on diferencial en derivadas
parciales lineal y homog enea. Suele escribirse como
= 0 , (I.3.7)
donde
=
2
x
2
+
2
y
2
+
2
z
2
(I.3.8)
es el Laplaciano, un operador diferencial lineal que desempe na un papel central en la
Fsica, expresado en coordenadas cartesianas.
Un ejemplo de ecuaci on diferencial lineal inhomog enea en derivadas parciales es la
que determina el potencial electrost atico en presencia de una distribuci on de carga dada
(x, y, z):
= f(x, y, z) , (I.3.9)
con f(x, y, z) = (x, y, z)/, donde es la permitividad del medio. Esta ecuaci on
recibe el nombre de ecuaci on de Poisson.
8
I.4 PROPIEDADES FUNDAMENTALES DE LAS ECUACIONES
DIFERENCIALES LINEALES
I.4. Propiedades fundamentales de las ecuaciones dife-
renciales lineales
Ya hemos mencionado que las ecuaciones diferenciales lineales aparecen a menu-
do en la descripci on de fen omenos fsicos. Sus propiedades matem aticas son igualmente
sobresalientes. Debido a la linealidad de L, es posible derivar en forma inmediata cier-
tas propiedades fundamentales de las soluciones de estas ecuaciones, aun sin conocerlas
explcitamente.
Consideremos primero la ecuaci on lineal homog enea
L[u] = 0 . (I.4.1)
Propiedad 0: Existencia de soluci on trivial:
La soluci on id enticamente nula u = 0 ( t en el caso ordinario o x, y, . . . en el general),
es siempre una soluci on de (I.4.1), denominada soluci on trivial.
Esto es inmediato de las expresiones (I.3.1) y (I.3.5), ya que todas las derivadas de
la funci on nula son tambi en nulas. Formalmente, es consecuencia directa de la linealidad
de L, dado que si c es una constante, L[cu] = cL[u] y por lo tanto, para c = 0 tenemos
L[0] = L[0u] = 0L[u] = 0. Destaquemos, no obstante, que la soluci on trivial no es, en
general, la unica soluci on posible de (I.4.1).
Propiedad 1: Superposici on
Si u
1
y u
2
son dos soluciones de la ecuaci on homog enea (I.4.1), de modo que satisfa-
cen L[u
1
] = L[u
2
] = 0, la combinaci on lineal u = c
1
u
1
+ c
2
u
2
es tambi en soluci on de
(I.4.1) c
1
, c
2
. Esto es muy f acil de probar debido al car acter lineal del operador L:
L[u
1
] = 0, L[u
2
] = 0 L[c
1
u
1
+ c
2
u
2
] = c
1
L[u
1
] + c
2
L[u
2
] = 0 .
Es tambi en inmediato demostrar esta propiedad para combinaciones lineales de un n ume-
ro nito de soluciones. Adem as, es evidente que esta propiedad es v alida tanto para ecua-
ciones lineales homog eneas ordinarias como en derivadas parciales.
Las consecuencias de esta propiedad evidente de las ecuaciones diferenciales linea-
les son importantsimas para la Fsica. Por ejemplo, en el caso de la masa unida a un
resorte, implica que si u
1
(t) y u
2
(t) son dos soluciones posibles para la posici on de la
partcula (correspondientes a distintas condiciones iniciales), cualquier combinaci on li-
neal c
1
u
1
(t) + c
2
u
2
(t) es tambi en soluci on, es decir, es tambi en un movimiento posible
de la partcula!, que corresponde a otra condici on inicial. Adem as, permite descompo-
ner soluciones de aspecto complejo como combinaci on lineal de soluciones m as simples.
Utilizaremos esta t ecnica de modo exhaustivo en secciones posteriores.
Desde un punto de vista m as matem atico, y en particular en el contexto del
Algebra
Lineal, las propiedades 0 y 1 anteriores implican que el conjunto de todas las soluciones
de la ecuaci on lineal homog enea es un espacio vectorial (sobre el cuerpo de los reales o
9
I.4 PROPIEDADES FUNDAMENTALES DE LAS ECUACIONES
DIFERENCIALES LINEALES
complejos). Veremos m as adelante (ver la secci on II.3.2) que en el caso de una ecuaci on
diferencial lineal ordinaria de orden n, es un espacio vectorial de dimensi on n, mientras
que, en el caso de una ecuaci on diferencial en derivadas parciales (con dos o m as varia-
bles), se trata de un espacio vectorial de dimensi on innita.
Pasemos ahora a la ecuaci on inhomog enea
L[u] = f . (I.4.2)
Como consecuencia de la linealidad de L, resulta tambi en inmediata la siguiente propie-
dad, no menos importante que las anteriores:
Propiedad 2: Soluci on general de la ecuaci on inhomog enea: Est a dada por la suma
de la soluci on general u
h
de la ecuaci on homog enea L[u] = 0, m as una soluci on particular
u
p
(arbitraria) de la ecuaci on inhomog enea:
L[u] = f u = u
h
+ u
p
, L[u
h
] = 0, L[u
p
] = f
Demostraci on: En primer lugar, si u
p
es una soluci on de la ecuaci on inhomog enea y
u
h
es una soluci on de la ecuaci on homog enea, u
p
+u
h
es tambi en soluci on de la ecuaci on
inhomog enea, ya que
L[u
p
+ u
h
] = L[u
p
] + L[u
h
] = f + 0 = f
En segundo lugar, si w
p
es otra soluci on de la ecuaci on inhomog enea, la linealidad de L
implica tambi en
L[w
p
u
p
] = L[w
p
] L[u
p
] = f f = 0
de modo que la diferencia w
p
u
p
es una soluci on u
h
de la ecuaci on homog enea. Por
lo tanto, podemos escribir cualquier soluci on particular w
p
de la ecuaci on inhomog enea
como
w
p
= u
p
+ u
h
donde u
p
es una soluci on particular (arbitraria) de la ecuaci on inhomog enea y u
h
una
soluci on de la ecuaci on homog enea.
Esto implica que para obtener la soluci on general de la ecuaci on inhomog enea, bas-
ta con conocer la soluci on general de la ecuaci on homog enea y una soluci on particular
(cualquiera) de la ecuaci on inhomog enea.
En el ejemplo de la partcula unida a un resorte, esto muestra que para conocer el mo-
vimiento frente a una fuerza adicional con dependencia temporal explcita f(t), debemos
primero determinar c omo se mueve la partcula en ausencia de fuerza (f(t) = 0), encon-
trando la soluci on general de la ecuaci on homog enea y, luego, encontrar alguna soluci on
particular en presencia de la fuerza f(t). Finalmente, se deben sumar ambas soluciones.
N otese, sin embargo, que el conjunto de soluciones de la ecuaci on inhomog enea no es
un espacio vectorial. Por ejemplo, la suma de dos soluciones particulares de la ecuaci on
10
I.4 PROPIEDADES FUNDAMENTALES DE LAS ECUACIONES
DIFERENCIALES LINEALES
inhomog enea no es una soluci on particular de dicha ecuaci on. Es v alida en cambio la
siguiente propiedad de superposici on:
Propiedad 3: Si L[u
1
] = f
1
y L[u
2
] = f
2
, entonces
L[c
1
u
1
+c
2
u
2
] = c
1
L[u
1
] + c
2
L[u
2
] = c
1
f
1
+ c
2
f
2
.
En otras palabras, si f es combinaci on lineal de f
1
y f
2
, f = c
1
f
1
+ c
2
f
2
, y se conocen
soluciones particulares u
p1
y u
p2
de L[u] = f
1
y L[u] = f
2
, entonces una soluci on par-
ticular de L[u] = f estar a dada por la combinaci on lineal u
p
= c
1
u
p1
+ c
2
u
p2
de estas
soluciones particulares.
En particular, si c es una constante y L[u
p
] = f L[cu
p
] = cL[u
p
] = cf. Si f se
multiplica por una constante, podemos pues obtener la correspondiente soluci on parti-
cular multiplicando la soluci on para f tambi en por dicha constante. En el ejemplo de la
partcula unida a un resorte, si duplicamos la fuerza f(t), obtenemos una soluci on particu-
lar duplicando la soluci on particular para f(t). Esto parece muy intuitivo, pero en realidad
es v alido en general s olo cuando la ecuaci on diferencial es lineal.
La presente propiedad de superposici on sugiere que si se puede expresar f en t erminos
de componentes f
i
m as simples, para las cuales se conocen las soluciones particulares
u
i
, entonces se conoce tambi en una soluci on particular para f:
L[u
i
] = f
i
, i = 1, . . . , m L[
m
i=1
c
i
u
i
] =
m
i=1
c
i
L[u
i
] =
m
i=1
c
i
f
i
.
Como consecuencia de ello, en un sistema lineal la respuesta a una se nal arbitra-
ria (que corresponde matem aticamente a la soluci on a una ecuaci on diferencial lineal
inhomog enea) puede obtenerse descomponiendo la misma en componentes simples (ya
sea arm onicas de frecuencia denida, o concentradas en un intervalo de tiempo muy pe-
que no), para las que es m as f acil obtener la respuesta (es decir, la soluci on particular).
Luego se suman todas estas respuestas particulares. Veremos esta t ecnica en detalle m as
adelante, siendo su uso muy extendido en Fsica e Ingeniera. M as a un, veremos que
pr acticamente toda funci on puede descomponerse en t erminos simples del tipo previo,
por lo que en sistemas lineales basta con conocer las respuestas a estas ultimas! De-
bido a la propiedad 3 es tambi en posible construir una soluci on particular de la ecua-
ci on inhomog enea que es una funci on lineal de f: u
p
= G(f), con G(c
1
f
1
+ c
2
f
2
) =
c
1
G(f
1
) + c
2
G(f
2
).
Propiedad 4: Soluciones complejas para L real
En el caso en que todos los coecientes a
m
en (I.3.1), o todos los a
0
, a
x
, a
y
, etc. en
(I.3.5), son funciones reales, y tanto t en (I.3.1) como x, y en (I.3.5) son tambi en reales,
la linealidad de L permite el uso de una t ecnica muy extendida en toda la fsica y la inge-
niera: Soluciones complejas. Con complejas nos referimos aqu a soluciones que tienen
parte real e imaginaria, es decir, que son funciones u : R C en el caso de ecuaciones
ordinarias (o u : R
n
C en ecuaciones a derivadas parciales).
11
I.4 PROPIEDADES FUNDAMENTALES DE LAS ECUACIONES
DIFERENCIALES LINEALES
Consideremos primero la ecuaci on homog enea. Si existe una soluci on compleja u =
u
r
+ iu
i
de L[u] = 0, entonces tanto la parte real u
r
= Re(u) como la imaginaria u
i
=
Im(u) son soluciones (reales) de la ecuaci on homog enea:
L[u] = 0 L[Re(u)] = 0, L[Im(u)] = 0 .
En efecto, como L[u] = 0 = 0 + i0 y L es lineal, tenemos
L[u
r
+ iu
i
] = L[u
r
] + iL[u
i
] = 0 +i0 .
Como, adem as, L es real, tanto L[u
r
] como L[u
i
] son reales, por lo que la ecuaci on ante-
rior implica
L[u
r
] = 0, L[u
i
] = 0 .
Por supuesto, tenemos tambi en que, si u
r
y u
i
son soluciones reales, entonces u = u
r
+iu
i
es tambi en una soluci on (caso particular de la propiedad de superposici on).
El lector podr a pensar para qu e puede servir una soluci on compleja en un problema
tpico donde u representa una magnitud fsica real, tal como una posici on o potencial
el ectrico. La respuesta es que en ciertos casos resulta m as f acil obtener o plantear solu-
ciones complejas, y luego obtener de ellas las soluciones reales !
El ejemplo tpico, como veremos m as adelante, es plantear una soluci on de la forma
u(t) = e
t
para una ecuaci on diferencial ordinaria homog enea con coecientes constan-
tes. Si resulta que debe ser complejo para que u(t) sea soluci on, entonces tal soluci on
compleja nos brinda directamente dos soluciones reales linealmente independientes: Si
=
r
+ i
i
, con
r
y
i
, entonces la f ormula de Euler nos dice que
e
t
= e
r
t
[cos(
i
t) + i sin(
i
t)]
y por lo tanto, que
u
r
= Re[u] = e
r
t
cos(
i
t), u
i
= Im[u] = e
r
t
sin(
i
t)
ser an ambas soluciones reales de L[u] = 0 si L[e
t
] = 0. Resulta m as f acil y sencillo
plantear una soluci on del tipo e
t
que de la forma e
t
cos(t) o similar. De hecho, todo
movimiento oscilatorio, puro o amortiguado, resulta m as f acil de describir en t erminos de
exponenciales complejas, y as es como se los trata en Fsica e Ingeniera.
Una consecuencia inmediata de la discusi on anterior es que si u(t) = u
r
(t) + iu
i
(t)
es una soluci on compleja de L[u] = 0, entonces la funci on conjugada u(t) = u
r
(t)
iu
i
(t) es tambi en soluci on de L[u] = 0 ya que, en denitiva, cualquier combinaci on
lineal de u
r
(t) y u
i
(t) ser a soluci on. No obstante, destaquemos que esta propiedad se
deriva directamente del car acter real de L, ya que si L[u] = 0, conjugando esta ecuaci on
obtenemos directamente L[ u] = 0.
Por otro lado, es importante destacar que, si L es lineal pero no es real, o si L es real
pero no es un operador lineal, la propiedad anterior no es v alida en general. Por ejemplo,
si la ecuaci on diferencial contiene un t ermino proporcional a u
2
, las componentes reales
12
I.4 PROPIEDADES FUNDAMENTALES DE LAS ECUACIONES
DIFERENCIALES LINEALES
e imaginarias se van a mezclar, y entonces L[u
r
+iu
i
] = 0 no implica necesariamente
que L[u
r
] = 0 o L[u
i
] = 0, aun si L es real.
La utilizaci on de soluciones complejas en ecuaciones diferenciales lineales reales se
extiende al caso inhomog eneo. Si f = f
r
+ if
i
, con f
r
y f
i
funciones reales, y si u
p
=
u
pr
+iu
pi
es una soluci on particular de la ecuaci on inhomog enea, entonces u
pr
= Re[u
p
]
es soluci on real de L[u] = f
r
, y u
pi
= Im[u
p
] es soluci on real de L[u] = f
i
:
L[u
p
] = f
r
+ if
i
L[Re(u
p
)] = f
r
, L[Im(u
p
)] = f
i
.
En efecto,
L[u
p
] = L[u
pr
+ iu
pi
] = L[u
pr
] + iL[u
pi
] = f
r
+if
i
y, como u
pr
y u
pi
son reales y L es real, igualando partes real e imaginaria obtenemos
L[u
pr
] = f
r
, L[u
pi
] = f
i
.
que es lo que queramos demostrar.
Nuevamente, el lector podr a dudar de la utilidad de este resultado, ya que en un pro-
blema fsico tpico f ser a real. Sin embargo, nuevamente puede resultar muy conveniente
escribir f como la parte real o imaginaria de una f compleja, para encontrar m as r apida
y claramente la soluci on particular.
El caso tpico es el de una f(t) de la forma Acos(t) con A y reales (por ejemplo,
una fuerza externa peri odica de frecuencia angular en el ejemplo de la masa unida a un
resorte), que podemos escribir como
f
r
(t) = Re[Ae
it
] .
El procedimiento usual es entonces resolver, en lugar de la ecuaci on L[u] = Acos t, la
ecuaci on compleja
L[u] = Ae
it
y luego tomar la parte real de la soluci on particular compleja u
p
(t) obtenida. As, la parte
real satisfar a la ecuaci on
L[u
pr
] = Acos t
y la parte imaginaria la ecuaci on
L[u
pi
] = Asin t
Resolver la ecuaci on compleja no s olo resulta en este caso m as f acil, como veremos
m as adelante, sino que adem as permite resolver, en un s olo paso, dos problemas in-
homog eneos reales: L[u] = Acos t y L[u] = Asin t (y de hecho tambi en L[u] =
Acos(t + ) para cualquier fase ).
Estas cuatro propiedades fundamentales de las ecuaciones diferenciales lineales per-
miten desarrollar m etodos generales para la resoluci on de estas ecuaciones, que ser an
presentados en detalle en los pr oximos captulos.
13
I.4 PROPIEDADES FUNDAMENTALES DE LAS ECUACIONES
DIFERENCIALES LINEALES
14
Captulo II
Ecuaciones Diferenciales Ordinarias:
Generalidades y Problemas de
Condiciones Iniciales
15
II.1 GENERALIDADES
II.1. Generalidades
Como hemos visto, una ecuaci on diferencial ordinaria de orden n puede escribirse en
la forma general
F(t, u,
du
dt
, . . . ,
d
n
u
dt
n
) = 0 , (II.1.1)
donde la inc ognita es la funci on u(t).
Denici on II.1.1 La ecuaci on se llama homog enea de grado p si, al multiplicar u(t) y
todas sus derivadas por un par ametro , se tiene:
F(t, u,
du
dt
, . . . ,
d
n
u
dt
n
) =
p
F(t, u,
du
dt
, . . . ,
d
n
u
dt
n
) , (II.1.2)
con p arbitrario (es decir, si F es una funci on homog enea de grado p en la inc ognita y
todas sus derivadas).
Una ecuaci on lineal homog enea es, pues, un ecuaci on homog enea de grado p = 1.
Comenzaremos estudiando las ecuaciones diferenciales ordinarias de primer orden.
II.2. Ecuaciones de primer orden: Algunos casos de f acil
resoluci on
Consideremos, ahora, ecuaciones de la forma
du
dt
= f(t, u) . (II.2.1)
Una ecuaci on diferencial ordinaria de primer orden puede siempre reducirse a esta
forma tras resolver la ecuaci on original respecto a la derivada. Veremos m as adelante
un importante teorema, debido a Picard, de existencia y unicidad de la soluci on para las
ecuaciones del tipo (II.2.1). Pero primero presentaremos algunos m etodos elementales de
resoluci on para casos particulares, que permitir an apreciar varias propiedades generales.
II.2.1. Ecuaciones con variables separables
Si f(t, u) no depende de u, (II.2.1) se reduce a
du
dt
= f(t) , (II.2.2)
17
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
cuya soluci on general es (si f(t) es integrable)
u(t) =
_
f(t)dt + c . (II.2.3)
La constante c se denomina constante de integraci on, y puede determinarse conociendo
el valor de u a un dado tiempo t
0
(es decir, el valor inicial): Si u(t
0
) = u
0
se tiene
u(t) =
_
t
t
0
f(t
)dt
+ u
0
. (II.2.4)
Cuando f(t, u) = h(t)g(u), la ecuaci on (II.2.1) se convierte en
du
dt
= h(t)g(u) . (II.2.5)
Esta ecuaci on puede reescribirse, para g(u) ,= 0, como
du
g(u)
= h(t)dt , (II.2.6)
cuya soluci on general es
_
du
g(u)
=
_
h(t)dt + c . (II.2.7)
Esta ecuaci on, del tipo (t, u) = c, determina implcitamente la soluci on u(t). La soluci on
particular para u(t
0
) = u
0
, con g(u
0
) ,= 0, est a dada por
_
u
u
0
du
g(u
)
=
_
t
t
0
h(t
)dt
. (II.2.8)
Para g(u) = 1 se obtiene, por supuesto, la ecuaci on (II.2.4). Si, adem as, existen races
u
r
tales que g(u
r
) = 0, a la soluci on (II.2.7) se deben agregar tambi en las soluciones
constantes
u(t) = u
r
, con g(u
r
) = 0 ,
que no necesariamente se obtienen de (II.2.7) o (II.2.8), pero que son obviamente solucio-
nes de (II.2.5).
Observar que el caso en que f(t, u) no depende de t corresponde a h(t) = 1 en (II.2.5).
El segundo miembro de (II.2.8) se reduce, entonces, a t t
0
, y la soluci on u(t) depender a,
pues, s olo de la diferencia t t
0
. Eso reeja la invariancia, en este caso, de la ecuaci on
(II.2.5) frente a traslaciones temporales. El que sigue es un ejemplo de este caso.
18
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
0.0 0.5 1.0 1.5 2.0 2.5 3.0
tf 0
1
2
3
4
5
N(t)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
tf 0
5
10
15
20
N(t)
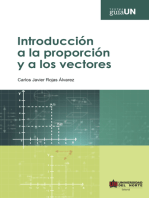
Figura 1: Gr aco de las soluciones (II.2.11) para t 0 y distintos valores de N
0
, para
k > 0 (izquierda) y k < 0 (derecha), con = [k[
1
.
Ejemplo II.2.1: Consideremos la ecuaci on diferencial lineal (I.1.1):
dN(t)
dt
= kN(t) . (II.2.9)
Si N(t) ,= 0 se tiene:
dN
N
= kdt ,
lo que conduce a
_
dN
N
= ln [N[ =
_
kdt +c = kt + c ,
o sea,
N(t) = Ce
kt
, (II.2.10)
donde C = e
c
. El valor de C puede determinarse a partir de la condici on inicial: Si
N(t
0
) = N
0
C = N
0
e
t
0
y
N(t) = N
0
e
k(tt
0
)
. (II.2.11)
Obtenemos as la conocida f ormula para la desintegraci on radiactiva, si k > 0, y para
el crecimiento exponencial de una poblaci on, si k < 0. Si bien la deducci on anterior es
v alida para N(t) ,= 0 (o sea, N
0
,= 0), para N
0
= 0 se recupera la soluci on constante
de (I.1.1), N(t) = 0 t, que corresponde a C = 0 (c ) en (II.2.10). Se verica
entonces que el conjunto de soluciones de (II.2.9) es un espacio vectorial de dimensi on 1:
toda soluci on es m ultiplo de la soluci on e
kt
(base del espacio).
N otese tambi en que las curvas N(t) para distintos valores de C, es decir, distintos
valores iniciales N
0
, nunca se cruzan (Fig. 1), por ser la soluci on unica para cualquier
valor de N
0
y t
0
. Por cada punto (t, N) pasa una y s olo una soluci on de (II.2.9).
19
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
Ejemplo II.2.2: Consideremos ahora la ecuaci on diferencial no lineal
dN
dt
= kN
2
.
Escribi endola, para N ,= 0, en la forma dN/N
2
= kdt, obtenemos
1
N
= kt + c, y
N(t) =
1
kt c
. (II.2.12)
Si N(t
0
) = N
0
c = kt
0
N
1
0
y entonces,
N(t) =
N
0
1 + N
0
k(t t
0
)
. (II.2.13)
Existe, adem as, la soluci on trivial N(t) = 0 t, la cual no es en principio un caso par-
ticular de (II.2.12), aunque puede obtenerse de (II.2.13) para N
0
= 0 (c ). El
conjunto de soluciones no es ahora un espacio vectorial, ya que las distintas soluciones
no son m ultiplos de una soluci on base. La soluci on general depende en forma no lineal de
la constante de integraci on c o condici on inicial N
0
. No obstante, existe nuevamente una
unica soluci on para todo valor inicial N
0
(y t
0
), por lo que las curvas N(t) para distintos
valores de N
0
no se cruzan (Fig. 2).
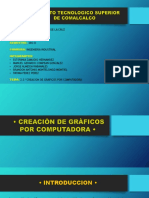
Para N
0
> 0 y k > 0, se obtiene en este caso un decrecimiento mucho m as lento que
el decrecimiento exponencial del ejemplo II.2.1: Ahora N(t)
1
k(tt
0
)
para t t
0
(N
0
k)
1
. Esto se debe a que al disminuir N, dN/dt N
2
se hace m as peque no que N.
N otese tambi en que N(t) se torna aproximadamente independiente de la condici on inicial
N
0
para t t
0
(N
0
k)
1
, a diferencia de lo que ocurra en el ejemplo lineal anterior.
Es tambi en interesante considerar el caso k < 0. En lugar de un crecimiento exponen-
cial, obtenemos un crecimiento explosivo, que diverge para t t
c
= t
0
+([k[N
0
)
1
, es
decir, para un tiempo nito. Esto reeja el hecho de que al crecer N,
dN
dt
aumenta en este
caso muy r apidamente. Matem aticamente, este ejemplo muestra que a un cuando f(t, u)
sea una funci on continua y derivable, por ejemplo tan simple como u
2
, no necesariamente
existe una soluci on continua de (II.2.1) para todo t > t
0
. Veremos luego este punto con
mayor detalle.
20
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
0.0 0.5 1.0 1.5 2.0 2.5 3.0
tf
1
2
3
4
5
N(t)
0.0 0.2 0.4 0.6 0.8 1.0
tf 0
5
10
15
20
N(t)
Figura 2: Gr aco de las soluciones (II.2.13) para t 0 y distintos valores de N
0
, para
k > 0 (izquierda) y k < 0 (derecha), con = [k[
1
. Las lneas punteadas (derecha)
indican las asntotas verticales.
Ejemplo II.2.3: Ecuaci on de Clausius-Clapeyron para la presi on de vaporizaci on
P(T) en funci on de la temperatura absoluta T.
Consideremos la ecuaci on
dP
dT
=
lP
RT
2
, (II.2.14)
para P > 0 y T > 0, donde l es el calor latente y R la constante de Rayleigh. La ecuaci on
puede reescribirse en la forma
dP
P
=
l dT
RT
2
.
Se integra f acilmente, con el resultado
log [P[ = log P =
l
RT
+ log C ,
donde C > 0; de aqu resulta
P(T) = C e
l/(RT)
.
Si no determinamos C tendremos una familia de soluciones. C queda determinada
si se conoce P a una dada temperatura T
0
> 0. Por ejemplo, si se conoce la presi on de
vaporizaci on a temperatura ambiente P(T
0
) = P
0
, resulta C = P
0
e
l
RT
0
y, por lo tanto,
P(T) = P
0
e
l
R
(
1
T
1
T
0
)
. (II.2.15)
Notemos que existe soluci on unica para cualquier P
0
y T
0
> 0, lo que implica nue-
vamente que las curvas P(T) para distintos valores de P
0
no se cruzan para T > 0 (Fig.
3). Por el contrario, todas las curvas convergen a 0 para T 0
+
. Matem aticamente, este
comportamiento est a relacionado con la singularidad del miembro derecho en (II.2.14)
para T 0, tema que discutiremos en breve.
21
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
1 2 3 4 5 6
RT
5
10
15
P(T)fP
a
Figura 3: Gr aco de las soluciones (II.2.15) para T > 0 y distintos valores de P
0
= P(T
0
)
(P
a
es la unidad de presi on).
II.2.2. Ecuaciones reducibles a variables separables
En algunos casos es posible reducir la ecuaci on diferencial a una ecuaci on del tipo
(II.2.5) mediante un cambio de variables sencillo. Por ejemplo, si
du
dt
= f(au + bt) , (II.2.16)
reemplazando z = au +bt, obtenemos
dz
dt
= a
du
dt
+ b = af(z) + b ,
que es de la forma (II.2.5). Por lo tanto, si af(z) + b ,= 0,
_
dz
af(z) + b
= t + c ,
que determina z(t) y u(t) = (z(t) bt)/a. Si z
0
tal que af(z
0
) + b = 0, debemos
agregar las soluciones z = z
0
, o sea u(t) = (z
0
bt)/a.
An alogamente, si
du
dt
= f(u/t) , (II.2.17)
reemplazando z = u/t obtenemos
dz
dt
=
1
t
du
dt
u
t
2
= (f(z) z)
1
t
,
que es nuevamente de la forma (II.2.5). Por lo tanto,
_
dz
f(z) z
=
_
dt
t
= ln [t[ + c , (II.2.18)
22
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
que determina z(t) y u(t) = tz(t). Si z
0
tal que f(z
0
) = z
0
, se deben agregar las
soluciones z = z
0
, o sea, u(t) = z
0
t. La ecuaci on (II.2.17) se denomina, a veces, ecuaci on
diferencial homog eneade primer orden (atenci on: eso puede conducir a confusiones
con la denici on general II.1.1), y su soluci on (II.2.18) es de la forma F(u/t) = c
t, con
F(z) = e
dz/(f(z)z)
. Si u(t) es soluci on, w(t) = u(t)/ es tambi en soluci on si ,= 0.
II.2.3. Ecuaciones en diferenciales totales. Factor integrante
Dada
du
dt
=
f(t, u)
g(t, u)
, (II.2.19)
con g(t, u) ,= 0, podemos reescribir esta ecuaci on como
g(t, u)du +f(t, u)dt = 0 . (II.2.20)
Si se cumple que
g(t, u)
t
=
f(t, u)
u
, (II.2.21)
(t, u) tal que
u
= g(t, u),
t
= f(t, u) (II.2.22)
y podemos reescribir (II.2.20) como la diferencial total
d = g(t, u)du + f(t, u)dt = 0 .
Las soluciones u(t) de (II.2.19) quedan entonces determinadas implcitamente por la
ecuaci on
(t, u) = c , (II.2.23)
con c constante. Si u(t
0
) = u
0
c = (t
0
, u
0
) y la soluci on particular queda determinada
por
(t, u) = (t
0
, u
0
) . (II.2.24)
La condici on (II.2.21) es necesaria y suciente para que el primer miembro de (II.2.20)
sea la diferencial total de una funci on .
Esta puede obtenerse como la integral de lnea
(t, u) =
_
(t,u)
(t
0
,u
0
)
[g(t
, u
)du
+ f(t
, u
)dt
] +
0
(II.2.25)
23
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
a lo largo de cualquier curva que vaya desde (t
0
, u
0
) a (t, u) (dentro de una regi on simple-
mente conexa donde f y g est en denidas), con
0
= (t
0
, u
0
) una constante arbitraria.
Por ejemplo, eligiendo dos segmentos paralelos a los ejes coordenados,
(t, u) =
_
u
u
0
g(t
0
, u
)du
+
_
t
t
0
f(t
, u)dt
+
0
. (II.2.26)
Equivalentemente, puede integrarse
u
= g(t, u) = para obtener
(t, u) =
_
g(t, u)du + c(t)
y determinar c
(t) a partir de
t
=
t
_
g(t, u) du + c
(t) = f(t).
Una vez determinada c
(t) puede obtenerse c(t) por integraci on, a menos de una cons-
tante, que quedar a determinada por la condici on inicial.
Notemos que la soluci on (II.2.7) para variables separables corresponde a (t, u) =
_
du
g(u)
_
f(t)dt.
Ejemplo II.2.4:
du
dt
=
2t +u
2u + t
. (II.2.27)
En este caso g(t, u) = 2u + t, f(t, u) = 2t + u, con
f
u
=
g
t
= 1. Podemos, entonces,
escribir (II.2.27) como
d = (2u + t)du + (2t + u)dt = 0 ,
con
(t, u) =
_
u
u
0
(2u
+t
0
)du
+
_
t
t
0
(2t
+ u)dt
+
0
= u
2
+ ut + t
2
(u
2
0
+ u
0
t
0
+t
2
0
) +
0
.
La soluci on u(t) queda entonces determinada por
u
2
+ ut + t
2
= c , (II.2.28)
o sea,
u(t) =
1
2
(t
4c 3t
2
), (II.2.29)
con c = u
2
0
+ u
0
t
0
+ t
2
0
y el signo determinado por u(t
0
) = u
0
. La soluci on s olo est a de-
nida para t [t
c
, t
c
], con t
c
= 2
_
c/3, anul andose el denominador de (II.2.27) para
t = t
c
(u(t
c
) = t
c
/2). La gr aca de u(t) es la parte superior o inferior de una elipse
con centro en el origen, rotada 45
o
(ver Fig. 4).
Notemos que la ecuaci on (II.2.27) es de la forma (II.2.17), con f(z) = (2+z)/(2z+
1). Puede comprobar el lector que (II.2.18) conduce a la soluci on (II.2.28).
24
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
Factor integrante.
Si la ecuaci on (II.2.21) no se verica, es a un posible convertir la ecuaci on (II.2.20) en
una diferencial exacta multiplicando a la misma por una funci on (t, u), llamada factor
integrante:
d = (t, u)g(t, u)du + (t, u)f(t, u)dt = 0 , (II.2.30)
con
(g)
t
=
(f)
u
. (II.2.31)
Desarrollando la ecuaci on anterior se obtiene
g
t
f
u
=
1
_
f
u
g
t
_
= f
ln [[
u
g
ln [[
t
, (II.2.32)
la cual es una ecuaci on en derivadas parciales para (t, u), que puede ser tan difcil de
resolver como la ecuaci on original ( puede demostrarse que si las derivadas de f y g son
continuas y, por lo menos, f ( o g) es no nula, la ecuaci on anterior posee siempre una
soluci on no nula). Sin embargo, en algunos casos, su resoluci on es sencilla. Por ejemplo,
si (t, u) es funci on de t solamente, obtenemos
ln [[
t
=
_
f
u
g
t
_
/g ,
lo cual es factible s olo si el segundo miembro es funci on de t unicamente. En ese caso,
(t) = c exp
_
_
f
u
g
t
g
dt
_
. (II.2.33)
Podemos jar c = 1, ya que la constante que multiplica a es irrelevante. En forma
similar pueden considerarse factores integrantes que sean funciones de u, o en general, de
alguna funci on de u y t. Una vez obtenido se procede como en el tem anterior.
Ejemplo II.2.5:
du
dt
=
u
2
+ u(t + 1) + t(t + 2)
2u + t
.
En este caso,
f
u
= 2u + t + 1 ,=
g
t
= 1. No obstante, [
f
u
g
t
]/g = 1 y, por lo tanto,
(t) = e
dt
= e
t
,
veric andose
(e
t
f)
u
=
(e
t
g)
t
= e
t
(2u + t + 1). Obtenemos, para este caso,
d = e
t
[(2u + t)du + (u
2
+ u(t + 1) + t(t + 2))dt] = 0 ,
25
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
2 1 1 2
t
2
1
1
2
u(t)
4 2 2 4
t
5
5
u(t)
Figura 4: Gr aco de las curvas (II.2.28) (izquierda) y (II.2.34) (derecha) para distintos
valores de c.
con (t, u) = e
t
(u
2
+ut + t
2
). La soluci on est a, entonces, determinada por
(u
2
+ ut + t
2
)e
t
= c , (II.2.34)
o sea,
u =
1
2
(t
4ce
t
3t
2
), (II.2.35)
con c = (u
0
, t
0
) > 0. La ecuaci on (t, u) = c origina una curva abierta si c > c
c
0,41
y una curva cerrada m as una abierta si c < c
c
(Fig. 4), estando las abscisas extremas de
las mismas determinadas por la condici on 3t
2
4ce
t
.
II.2.4. Ecuaciones diferenciales lineales de primer orden
Ecuaci on general lineal de primer orden. M etodo de variaci on de la constante.
Resolveremos ahora una ecuaci on diferencial lineal general de primer orden. Como
hemos visto, corresponde al caso en que f(t, u) en (II.2.1) es una funci on lineal de u:
du
dt
= a(t) + b(t)u. (II.2.36)
Podemos escribir (II.2.36) en la forma
L[u] = a(t), L =
d
dt
b(t) , (II.2.37)
donde L es un operador lineal.
Consideremos, primero, a(t) = 0. En este caso, la ecuaci on (II.2.36) es homog enea y
de variables separables:
du
u
= b(t)dt ,
26
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
de donde ln [u(t)[ =
_
b(t)dt +c
, y entonces
u(t) = c e
b(t)dt
, (II.2.38)
con c arbitrario. Si u(t
0
) = u
0
utilizando la primitiva de b(t) que se anule en t = t
0
obtenemos
u(t) = u
0
e
t
t
0
b(t
)dt
. (II.2.39)
Si a(t) ,= 0 (caso inhomog eneo), podemos intentar una soluci on del tipo (II.2.38), pero
con c una funci on de t a determinar:
u = u
h
(t) c(t), u
h
(t) = e
b(t)dt
. (II.2.40)
Este procedimiento se denomina variaci on de par ametros, o de constantes. Se obtiene,
notando que L[u
h
(t)] = 0,
L[u] = L[u
h
(t)]c(t) + u
h
(t)
dc
dt
= u
h
(t)
dc
dt
= a(t) .
Por lo tanto, dc/dt = a(t)/b(t) y entonces,
c(t) =
_
a(t)
u
h
(t)
dt + c
,
con c
una constante arbitraria. Reemplazando en (II.2.40), obtenemos nalmente
u(t) = u
h
(t)[c
+
_
a(t)
u
h
(t)
dt]
= e
b(t)dt
[c
+
_
e
b(t)dt
a(t)dt] . (II.2.41)
La soluci on general es, pues, una soluci on de la ecuaci on homog enea (u
h
(t)c
), m as una
soluci on particular de la inhomog enea. La soluci on particular que satisface u(t
0
) = u
0
puede escribirse como
u(t) = e
t
t
0
b(t
)dt
[u
0
+
_
t
t
0
e
t
0
b(t
)dt
a(t
)dt
]
= K(t, t
0
)u
0
+
_
t
t
0
K(t, t
)a(t
)dt
, (II.2.42)
donde
K(t, t
) = e
t
t
b(t
)dt
= u
h
(t)/u
h
(t
) ,
es la soluci on de la ecuaci on homog enea que satisface u(t
) = 1, pues K(t
, t
) = 1.
27
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
La ecuaci on (II.2.41) puede tambi en obtenerse por el m etodo del factor integrante. En
este caso f = [a(t) + b(t)u], g = 1 y (
f
u
g
t
)/g = b(t) es funci on de t, por lo que
puede obtenerse de (II.2.33): (t) = ce
b(t)dt
. Finalmente,
(t, u) = (t)u
_
(t)a(t)dt .
La ecuaci on (t, u) = c conduce a (II.2.41).
Ejemplo II.2.6: La velocidad de una partcula de masa men un medio viscoso con fuerza
de roce proporcional a la velocidad F
r
= v y bajo la acci on de una fuerza externa F(t),
satisface la ecuaci on
m
dv
dt
= v + F(t) , (II.2.43)
que puede escribirse como
dv
dt
= v + f(t) ,
donde = /m > 0 y f(t) = F(t)/m. Utilizando el resultado anterior, la soluci on
general es entonces
v(t) = e
t
[c
+
_
e
t
f(t)dt]
y la soluci on para v(t
0
) = v
0
puede escribirse como
v(t) = v
0
e
(tt
0
)
+
_
t
t
0
e
(tt
)
f(t
)dt
,
que corresponde a K(t
2
, t
1
) = e
(t
2
t
1
)
.
Por ejemplo, si
f(t) =
_
0 t < 0 , y t > t
c
f
0
, 0 t t
c
se obtiene, para t
0
= 0, v
0
= 0,
v(t) =
_
_
_
0 t < 0
(f
0
/)(1 e
t
) 0 t t
c
(f
0
/)(1 e
t
c
)e
(tt
c
)
t > t
c
. (II.2.44)
La soluci on para t > t
c
es obviamente la soluci on de la ecuaci on homog enea para t
0
= t
c
y v(t
c
) = (f
0
/)(1 e
t
c
).
Observemos que si f
0
y t
c
0, con f
0
t
c
J (nito), entonces v(t
c
) J. Esto
corresponde justamente a una fuerza actuando s olo en t = 0 que suministra un impulso J.
Notemos tambi en que si f(t) = f
0
t > 0 (t
c
), v(t) = (f
0
/)(1e
t
) t > 0,
con v(t) f
0
/ (velocidad lmite) para t .
28
II.2 ECUACIONES DE PRIMER ORDEN: ALGUNOS CASOS DE F
ACIL
RESOLUCI
ON
t
c
f1
t
c
f
0 1 2 3 4 5 6
tf 0.0
0.2
0.4
0.6
0.8
1.0
vfv
L
Figura 5: Gr aco de la soluci on (II.2.44) para distintos valores de t
c
, con =
1
y
v
L
= f
0
la velocidad lmite para t
c
= (fuerza externa constante).
Ejemplo II.2.7: La corriente I de un circuito el ectrico con autoinducci on L, resisten-
cia R y tensi on V (t) satisface una ecuaci on completamente similar:
L
dI
dt
+ IR = V (t) .
Es decir, cambiando v I, m L, R y F(t) V (t). La soluci on para I(0) = I
0
y L, R constantes, es entonces
I(t) = I
0
e
Rt/L
+
_
t
0
e
R(tt
)/L
V (t
)dt
.
Este es un tpico ejemplo de analoga fsica, en el que sistemas y magnitudes diferentes
son descriptos por una misma ecuaci on diferencial, exhibiendo entonces comportamientos
an alogos. Resulta as posible simular el movimiento de la masa en el medio viscoso sujeta
a una fuerza externa f(t) mediante un circuito LR con R/L = /m, V (t)/L = F(t)/m,
o viceversa.
II.2.5. Ecuaciones reducibles a la forma lineal
Algunas ecuaciones pueden ser reducidas a ecuaciones lineales mediante un sencillo
cambio de variables. Un ejemplo conocido es la ecuaci on de Bernoulli,
du
dt
= a(t)u
n
+ b(t)u, n ,= 1 .
Sustituyendo z = u
1n
, obtenemos
n
dz
dt
= (1 n)u
n
du
dt
= (1 n)u
n
[a(t)u
n
+ b(t)u]
= (1 n)[a(t) + b(t)z] ,
que es una ecuaci on lineal en z.
29
II.3 PROBLEMAS DE CONDICIONES INICIALES
En general, si u = g(z), con g invertible, y z satisface la ecuaci on lineal
dz/dt = a(t) + b(t)z,
u satisface la ecuaci on no lineal
du
dt
= g
(z)
dz
dt
= g
(g
1
(u))[a(t) + b(t)g
1
(u)] ,
que posee la soluci on u(t) = g(z(t)), con z(t) la soluci on de la ecuaci on lineal. Por
ejemplo, si u = z
1/(1n)
,
du
dt
=
1
1n
[a(t)u
n
+ b(t)u], que es la ecuaci on de Bernoulli.
An alogamente, si u = e
z
,
du
dt
= a(t)u +b(t)uln u,
cuya soluci on es e
z(t)
mientras que, si u = ln z,
du
dt
= a(t)e
u
+ b(t) ,
cuya soluci on es ln z(t).
Destaquemos nalmente por qu e es tan importante el caso lineal, cuando a primera
vista parecera tratarse de un caso muy particular. En el caso general, dado por la ecuaci on
(II.2.1), si la funci on f(t, u) es sucientemente suave como para admitir un desarrollo en
serie de Taylor en la variable u (alrededor de cierto valor u
0
), tendremos:
f(t, u) f(t, u
0
) + f
u
(t, u
0
)(u u
0
)
donde f
u
(t, u
0
) = f/u[
u=u
0
. Es decir que, para [u u
0
[ sucientemente peque no, co-
mo ocurre al estudiar peque nos desplazamientos respecto a un punto de equilibrio u
0
(en
el que f(t, u
0
) = 0), podemos aproximar f(t, u) por una funci on lineal en u, y obtener
as una ecuaci on diferencial lineal que es exactamente resoluble. Esta soluci on analtica
aproximada puede darnos informaci on muy util acerca del problema original. Por ejem-
plo, nos puede indicar, en forma analtica, c omo se comporta el sistema para peque nos
apartamientos del equilibrio y determinar as si el equilibrio es estable o inestable. Ve-
remos en la secci on (II.3.4) un ejemplo especco de esta aproximaci on en el caso del
p endulo simple.
II.3. Problemas de condiciones iniciales
II.3.1. Teorema de existencia y unicidad de Picard para problemas
de valores iniciales
Consideremos la ecuaci on diferencial ordinaria de primer orden
du
dt
= f(t, u) , (II.3.1)
30
II.3 PROBLEMAS DE CONDICIONES INICIALES
t
u
t
0
t
0
a t
0
a
u
0
b
u
0
b
u
0
Figura 6: El rect angulo R
con la condici on inicial u(t
0
) = u
0
. Salvo casos especiales, como los vistos antes, no
es posible, en general, resolver este problema en forma analtica. Es necesario, entonces,
recurrir a m etodos aproximados, que permiten resolverlo en forma num erica. Para ello,
se necesita, primero, estar seguro de que, efectivamente, existe una soluci on de (II.3.1)
para una determinada f y condici on inicial. El siguiente teorema demuestra que dicha
soluci on existe y es unica para una clase muy amplia de funciones. A la vez, el teorema
proporciona un m etodo de resoluci on aproximado de (II.3.1) (m etodo de Picard).
Teorema II.3.1 Si f(t, u) es continua en un rect angulo Rdado por [tt
0
[ a, [uu
0
[
b, y satisface en R la condici on de Lipschitz
[f(t, u
2
) f(t, u
1
)[ N[u
2
u
1
[ , (II.3.2)
con N constante, entonces, en el intervalo
[t t
0
[ r, r = Min[a, b/M] , (II.3.3)
con M el valor m aximo de [f[ en R, existe una unica soluci on u(t) de (II.3.1) que satisface
u(t
0
) = u
0
.
La condici on [t t
0
[ r asegura que la soluci on no salga de R. En efecto (ver gura
7), dado que [f[ M en R, si [t t
0
[ r, integrando (II.3.1) y tomando valor absoluto,
se obtiene
[u(t) u
0
[ = [
_
t
t
0
f(t
, u(t
))dt
[ [
_
t
t
0
[f(t
, u(t
))[dt
[ M[t t
0
[ Mr = b .
Observar que, para que se cumpla la condici on de Lipschitz (II.3.2), es suciente que
f
u
=
f
u
exista y est e acotada en R dado que, por el teorema del valor medio, si [f
u
[ N
en R,
[f(t, u
2
) f(t, u
1
)[ = [f
u
(t, )(u
2
u
1
)[ N[u
2
u
1
[
31
II.3 PROBLEMAS DE CONDICIONES INICIALES
t
u
tg M
t
0
t
0
a t
0
a
u
0
b
u
0
b
u
0
t
0
r t
0
r
Figura 7: Denici on de r
con [u
1
, u
2
].
Demostraci on:
Demostraremos primero la existencia de la soluci on. La ecuaci on (II.3.1) es equiva-
lente a la ecuaci on integral
u(t) = u
0
+
_
t
t
0
f(t
, u(t
))dt
. (II.3.4)
Podemos plantear ahora una secuencia de aproximaciones sucesivas u
0
, u
1
(t), . . . , u
n
(t)
denidas por
u
n
(t) = u
0
+
_
t
t
0
f(t
, u
n1
(t
))dt
, n 1 , (II.3.5)
con u
0
(t) = u
0
(m etodo de Picard). La restricci on (II.3.3) asegura que u
n
(t) no sale de
R para ning un n (o sea, [u
n
(t) u
0
[ b si [t t
0
[ r). En efecto, para n = 0 esto
se cumple trivialmente. Asumiendo que se cumple para u
n1
(t), obtenemos, dado que
[f[ M en R,
[u
n
(t)u
0
[
_
t
t
0
[f(t
, u
n1
(t
))[dt
M[tt
0
[ b (II.3.6)
para [t t
0
[ r.
32
II.3 PROBLEMAS DE CONDICIONES INICIALES
Probaremos ahora que la sucesi on (II.3.5) converge. Si n 1 y [t t
0
[ r,
[u
n+1
(t)u
n
(t)[ = [
_
t
t
0
[f(t
, u
n
(t
))f(t
, u
n1
(t
))]dt
[
[
_
t
t
0
[f(t
, u
n
(t
)) f(t
, u
n1
(t
))[dt
[
N[
_
t
t
0
[u
n
(t
)u
n1
(t
)[dt
[ (II.3.7)
Para n = 1, (II.3.6) implica que
[u
1
(t) u
0
[ M[t t
0
[ .
Por lo tanto, (II.3.7) conduce a
[u
2
(t) u
1
(t)[ NM[
_
t
t
0
[t
t
0
[dt
[ = MN
[t t
0
[
2
2
y para n general, a
[u
n
(t)u
n1
(t)[
MN
n1
[tt
0
[
n
n!
. (II.3.8)
Entonces, [u
n+1
(t)u
n
(t)[ MN
n
[
_
t
t
0
|t
t
0
|
n
n!
dt
[ = MN
n
|tt
0
|
n+1
(n+1)!
y, por lo tanto,
lm
n
[u
n+1
(t)u
n
(t)[ = 0. Adem as, como
u
n
(t) = u
0
+ (u
1
(t)u
0
) +. . . + (u
n
(t)u
n1
(t)) ,
el lmite
u(t) lm
n
u
n
(t) = u
0
+
n=1
(u
n
(t)u
n1
(t)) (II.3.9)
existe, pues la serie de diferencias es una serie absolutamente convergente:
n=1
[u
n
(t)u
n1
(t)[ M
n=1
N
n1
[tt
0
[
n
n!
= M
e
N|tt
0
|
1
N
.
La convergencia es tambi en uniforme por el criterio de Weierstrass (si [f
n
(t)[ M
n
t I = [t
1
, t
2
] y
n=1
M
n
converge
n=1
f
n
(t) converge uniformemente sobre I a una
funci on f(t); recordemos que la convergencia es uniforme si > 0, n
0
t.q. si n > n
0
,
[f(t) f
n
(t)[ < t I).
Por lo tanto, el lmite de la integral en (II.3.5) es la integral del lmite, de modo que
u(t) es soluci on de (II.3.1). Notemos que u(t) es un punto jo del operador A[u(t)] = u
0
+
33
II.3 PROBLEMAS DE CONDICIONES INICIALES
_
t
t
0
f(t
, u(t
))dt
, (es decir u(t) = A[u(t)]), el cual transforma funciones u(t) contenidas
en R en funciones A[u(t)] tambi en contenidas en R si [t t
0
[ r.
Demostremos ahora la unicidad. Si v(t) es otra soluci on de (II.3.1) que satisface
v(t
0
) = u
0
, entonces, para [t t
0
[ r,
[u(t) v(t)[
_
t
t
0
[f(t
, u(t
)) f(t
, v(t
))[dt
N
_
t
t
0
[u(t
) v(t
)[dt
KN[t t
0
[
donde K es el m aximo de [u(t) v(t)[ para [t t
0
[ r. Esto implica [u(t) v(t)[ = 0
para [t t
0
[ r. En efecto, aplicando la cota anterior para [u(t
) v(t
)[, obtenemos
[u(t) v(t)[ KN
2
_
t
t
0
[t
t
0
[dt
= KN
2
[t t
0
[
2
2
y, repitiendo el procedimiento anterior n veces,
[u(t) v(t)[ K
(N[t t
0
[)
n
n!
, (II.3.10)
que tiende a 0 para n .
Ejemplo II.3.1: Consideremos nuevamente la ecuaci on lineal
du
dt
= u
Aplicando el m etodo de Picard para t
0
= 0, con u(t
0
) = u
0
, obtenemos
u
1
= u
0
_
t
0
u
0
dt
= u
0
[1 t]
u
2
= u
0
_
t
0
u
1
(t
)dt
= u
0
[1 t +
2
t
2
/2]
y, en general, u
n
= u
0
n
m=0
(t)
m
m!
, de modo que
u(t) = lm
n
u
n
(t) =
n=0
(t)
n
n!
= u
0
e
t
.
La serie anterior converge t, pero la condici on (II.3.3) proporciona una estimaci on muy
conservadora del intervalo de convergencia: Para u
0
> 0, M = [[(b + u
0
) y
r = Min[a,
b
[[(u
0
+ b)
]
1
[[
34
II.3 PROBLEMAS DE CONDICIONES INICIALES
si a > [[
1
, ya que b/(u
0
+b) < 1 b > 0. En general, el intervalo (II.3.3) es demasiado
restrictivo y el desarrollo de Picard converge en un intervalo mayor.
Ejemplo II.3.2: Consideremos ahora
du
dt
= u
2
con t
0
= 0. Obtenemos
nu
1
= u
0
_
t
0
u
2
0
dt
= u
0
(1 u
0
t)
u
2
= u
0
_
t
0
u
2
1
(t
)dt
= u
0
[1u
0
t+(u
0
t)
2
(u
0
t)
3
3
]
u
3
= u
0
[
3
n=0
(u
0
t)
n
+R
4
(u
0
t)] ,
donde R
4
(x) =
1
3
x
4
(2 x +
1
3
x
2
1
63
x
3
). En general,
u
n
(t) = u
0
[
n
m=0
(u
0
t)
n
+ R
n+1
(u
0
t)] ,
con R
n+1
(x) = O(x
n+1
). Para n , la soluci on converge, para [u
0
t[ < 1, a
u(t) =
u
0
1 + u
0
t
, (II.3.11)
que coincide con la soluci on (II.2.13). Si > 0 (con u
0
> 0) la soluci on nal (II.3.11)
es v alida t > 0, aunque el desarrollo de Picard converge s olo para [t[ < [u
0
[
1
. En
cambio, si < 0 la soluci on existe s olo para t < [u
0
[
1
, que coincide con el radio de
convergencia del desarrollo. Notemos que la condici on (II.3.3) da, en este caso,
r = Min[a,
b
[[(u
0
+ b)
2
]
1
4[[u
0
,
dado que b/(u
0
+b)
2
<
1
4u
0
, que es nuevamente menor que el radio de convergencia de la
serie.
Otras propiedades
Resulta obvio a partir de (II.3.1) que, si f(t, u) posee derivadas parciales continuas
hasta orden k en un entorno de (t
0
, u
0
), la soluci on u(t) posee derivadas continuas hasta
orden k + 1 en un entorno de t
0
.
Puede probarse tambi en que, si f depende en forma continua de un par ametro (o
sea,
du
dt
= f(t, u, )) y satisface las condiciones del teorema de unicidad, con N en (II.3.2)
35
II.3 PROBLEMAS DE CONDICIONES INICIALES
independiente de la soluci on u(t, ) depende en forma continua de para [t
t
0
[ r (lo mismo vale para un conjunto de par ametros). En particular, esto implica
que u(t) depender a en forma continua de la condici on inicial u(t
0
) = u
0
. En efecto,
escribiendo v = u u
0
, s = t t
0
, tenemos
dv
ds
= f(s + t
0
, v + u
0
) = g(s, v), con
v(0) = 0, donde los valores iniciales quedan representados por par ametros de la funci on
g. De todos modos, esto no impide que dos soluciones con condiciones iniciales cercanas
se alejen mucho para valores grandes de [t t
0
[. Por ejemplo, los sistemas ca oticos son
extremadamente sensibles a las condiciones iniciales. En los mismos, si dos soluciones
u
1
(t), u
2
(t) dieren inicialmente en una peque na cantidad u
0
, para tiempos grandes
[u
1
(t) u
2
(t)[ [u
0
[e
t
, donde > 0 es el llamado exponente de Lyapunov.
Extensi on de la soluci on
Si bien el teorema demuestra la existencia de soluci on para [t t
0
[ r la misma
puede, en principio, extenderse fuera de este intervalo tomando como nuevos puntos ini-
ciales a t
0
r. No obstante, como hemos visto no siempre es posible continuar la soluci on
indenidamente. Esto puede deberse a que la soluci on se acerca a un punto donde las con-
diciones del teorema no se cumplen o tambi en a que la soluci on se aproxima a una asntota
vertical (lm
tt
c
u(t) = ), como ocurre en (II.3.11) para u
0
< 0 (t
c
= [u
0
[
1
). Un
ejemplo del primer caso es la soluci on (II.2.29) de la ecuaci on (II.2.27), limitada al inter-
valo [t[ < t
c
=
_
4c/3. Si t = t
c
, u(t) =
1
2
t, anul andose el denominador de (II.2.27).
Puntos singulares
Los puntos (t
0
, u
0
) en los que, o bien no existe soluci on de (II.3.1) o la soluci on no es
unica, se denominan puntos singulares. Obviamente, en estos puntos no se satisfacen las
condiciones del teorema de unicidad, aunque no todo punto en el que las mismas no se
cumplan es singular. Los condiciones del teorema son sucientes pero no necesarias. Por
ejemplo, puede demostrarse que, si f es continua en un entorno de (t
0
, u
0
), existe siempre
una soluci on de (II.3.1), pero esta puede no ser unica si no se cumple la condici on de
Lipschitz. La curva formada por los puntos singulares se denomina curva singular. Una
soluci on formada enteramente por puntos singulares se denomina soluci on singular.
Ejemplo II.3.3:
du
dt
= q
u
t
, q > 0 . (II.3.12)
En este caso f(t, u) no es continua en t = 0. Una soluci on de (II.3.12) es obviamente
u(t) = 0. Adem as, si u(t) ,= 0, integrando por separaci on de variables obtenemos
ln [u[ = q ln [t[ +c
o sea, si t > 0,
u(t) = c t
q
. (II.3.13)
36
II.3 PROBLEMAS DE CONDICIONES INICIALES
3 2 1 1 2 3
t
10
5
5
10
u(t)
3 2 1 1 2 3
t
10
5
5
10
u(t)
Figura 8: Gr acas de las soluciones (II.3.13) para q = 2 (izquierda) y q = 1 (derecha),
y c = 0, 1, 2, 4.
Si t
0
> 0, existe una unica soluci on que satisface u(t
0
) = u
0
, u
0
(c = u
0
/t
q
0
). Pero
cuando consideramos t
0
= 0, vemos que si la condici on inicial es u
0
= 0, (II.3.13)
es soluci on de (II.3.12) para cualquier valor de c (incluyendo c = 0). No existe pues
soluci on unica para u(0) = 0, existiendo en cambio innitas soluciones. Por el contrario,
si t
0
= 0 y u
0
,= 0, no existe ninguna soluci on. Este tipo de punto singular se denomina
nudo (Fig. 8).
Si consideramos, ahora, q < 0 en (II.3.12), u(t) no permanece nito para t 0,
excepto para c = 0 (Fig. 8). Si t
0
= 0, para u
0
= 0 obtenemos, en este caso, una unica
soluci on u(t) = 0, mientras que, si u
0
,= 0, no existe soluci on.
Ejemplo II.3.4:
du
dt
=
u, ,= 0 . (II.3.14)
Para u 0
+
, si bien
u es continua, no se cumple la condici on de Lipschitz pues
f
u
=
2
u
. Los puntos (t, u) = (t, 0) pueden ser pues puntos singulares. Por
separaci on de variables, para u > 0 obtenemos la soluci on
u(t) =
1
4
(t +c)
2
, t + c > 0 (II.3.15)
No obstante, tenemos tambi en la soluci on trivial
u(t) = 0 , (II.3.16)
que no se obtiene de (II.3.15) (Ver Fig. 9).
Si t
0
= 0 y u
0
> 0, obtenemos como unica soluci on
u(t) =
1
4
(2
u
0
+ t)
2
, (II.3.17)
donde el par entesis debe ser positivo. La soluci on (II.3.17) est a denida t > 0 si > 0,
pero s olo para t t
c
= 2
u
0
/[[ si < 0. En este caso, u(t) 0 para t t
c
, y no
37
II.3 PROBLEMAS DE CONDICIONES INICIALES
3 2 1 1 2 3
t
1
1
2
3
u(t)
Figura 9: Gr acas de las soluciones (II.3.15) para = 1 (curvas crecientes) y = 1
(curvas decrecientes), y c = 0, 1, 2, junto con la soluci on singular u(t) = 0 t.
puede extenderse para t > t
c
. Si < 0, la soluci on disminuye pues m as rapidamente que
en el caso lineal (
du
dt
= u, con u(t) = u
0
e
||t
si < 0) apag andose en un tiempo
nito.
Consideremos, ahora, u
0
= 0. La ecuaci on (II.3.17) se reduce a
u(t) =
1
4
2
t
2
. (II.3.18)
Si > 0, (II.3.18) es soluci on de (II.3.14) y satisface u(0) = 0, al igual que (II.3.16).
Por lo tanto, la soluci on no es unica. Lo mismo ocurre obviamente para cualquier valor
de t
0
. Los puntos (0, t) son pues singulares y la soluci on trivial (II.3.16) es una soluci on
singular. Por el contrario, si < 0 (II.3.18) no es soluci on de (II.3.14), obteni endose
como unica soluci on, para u
0
= 0 y t > 0, la soluci on trivial (II.3.16).
Soluciones aproximadas
Si bien no vamos a tratar el tema de aproximaciones num ericas, cabe destacar que
existen tambi en otras sucesiones u
n
(t) que convergen uniformemente a la soluci on u(t) y
que pueden, por lo tanto, utilizarse para aproximar la soluci on. El m etodo m as elemental
y conocido es el m etodo de la quebrada de Euler, que consiste en subdividir el intervalo
[t
0
, t
0
+ r] en n subintervalos de longitud h = r/n, y aproximar la soluci on u(t) por
segmentos entre los puntos (t
0
, u
0
), (t
1
, u
1
), . . ., (t
n
, u
n
) denidos por
t
i
= t
i1
+ h, u
i
= u
i1
+ hf(t
i1
, u
i1
), i = 1, . . . , n,
que se obtienen de suponer f(t, u(t)) = f(t
i1
, u
i1
) (constante) en el intervalo [t
i1
, t
i
].
Cada segmento es, entonces, tangente a la soluci on exacta en (t
i1
, u
i1
). Puede mostrar-
se que tal aproximaci on converge, para h 0 (o sea, n ), a la soluci on exacta u(t)
si se cumplen las condiciones del teorema de existencia. Renamientos del m etodo ante-
rior conducen a aproximar u(t) por una sucesi on de polinomios de grado m entre puntos
(t
i
, u
i
), tales que posean un contacto de orden m con la soluci on exacta en dichos puntos
(m etodos de St ormer, Runge, etc.). Estos m etodos est an directamente incorporados en di-
versos programas de c alculo num erico o analtico (por ejemplo [11]), siendo muy sencilla
y r apida su utilizaci on.
38
II.3 PROBLEMAS DE CONDICIONES INICIALES
II.3.2. Generalizaci on a sistemas de ecuaciones de primer orden
Consideremos ahora el sistema de ecuaciones acopladas
du
i
dt
= f
i
(t, u
1
, . . . , u
n
), i = 1, . . . , n, . (II.3.19)
donde la derivada de cada variable u
i
depende de t, de s misma y y de todas las dem as
variables. El teorema de existencia y unicidad se generaliza en forma inmediata a este tipo
de sistemas. Podemos reescribir (II.3.19) en forma concisa como
du
dt
= f(t, u) , (II.3.20)
con
u(t) =
_
_
_
_
_
_
u
1
(t)
.
.
.
u
n
(t)
_
_
_
_
_
_
f(t, u) =
_
_
_
_
_
_
f
1
(t, u)
.
.
.
f
n
(t, u)
_
_
_
_
_
_
,
y vale el siguiente teorema:
Teorema II.3.2 Dado el sistema de ecuaciones lineales de primer orden
du
dt
= f(t, u) , (II.3.21)
con condici on inicial u(t
0
) = u
0
, si existe una regi on Rdenida por [tt
0
[ a, [uu
0
[
b, donde se cumplen las condiciones
a) f
i
(t, u) continua en R,
b) [f(t, u
2
) f(t, u
1
)[ N[u
2
u
1
[,
entonces existe una unica soluci on u(t) de (II.3.21), que satisface u(t
0
) = u
0
, dentro del
intervalo
[t t
0
[ r = Min[a, b/M] ,
donde M es el m aximo de [f[ en R.
Para que se cumpla la condici on de Lipschitz es suciente que las derivadas parciales
f
ij
=
f
i
u
j
sean acotadas en R pues, en tal caso, por el teorema del valor medio,
[f(t, u
2
) f(t, u
1
)[
2
=
i
[f
i
(t, u
2
) f
i
(t, u
1
)[
2
=
i
[
j
f
ij
(t,
i
)(u
2j
u
1j
)[
2
i
(
j
N
ij
[u
2j
u
1j
[)
2
N
2
[u
2
u
1
[
2
. (II.3.22)
La demostraci on del teorema es exactamente igual a la ya presentada en el caso de una
ecuaci on. S olo se deben reemplazar f, u y v en (II.3.4)(II.3.10) por f, u y v.
39
II.3 PROBLEMAS DE CONDICIONES INICIALES
II.3.3. Representaci on de una ecuaci on diferencial de orden n me-
diante un sistema de primer orden
La generalizaci on del Teorema de Picard anterior es muy poderosa, porque:
i) Toda ecuaci on diferencial ordinaria de orden n para una funci on u(t) puede escribirse
como un sistema de n ecuaciones de primer orden,
ii) todo sistema de mecuaciones diferenciales de orden n para mfunciones u
1
(t), . . . , u
m
(t)
puede escribirse como un sistema de mn ecuaciones de primer orden
En efecto, la ecuaci on diferencial ordinaria de orden n,
d
n
u
dt
n
= f(t, u,
du
dt
, . . . ,
d
n1
u
dt
n1
) (II.3.23)
puede reducirse a un sistema de n ecuaciones ordinarias de primer orden de la forma
(II.3.21) deniendo
u
1
= u, u
2
=
du
dt
, . . . , u
n
=
d
n1
u
dt
n1
, (II.3.24)
ya que
du
1
dt
= u
2
,
du
2
dt
= u
3
, . . . ,
du
n
dt
= f(t, u
1
, . . . , u
n
) , (II.3.25)
o sea, f
1
(t, u) = u
2
, f
2
(t, u) = u
3
, . . ., f
n
(t, u) = f(t, u).
Entonces, si f satisface las condiciones del teorema, queda garantizada la existencia
y unicidad de la soluci on de (II.3.23) para la condici on inicial u(0) = u
0
, donde
u
0
= (u(0),
du
dt
[
t=0
, . . . ,
d
n1
u
dt
n1
[
t=0
)
es el vector que contiene los valores iniciales de la posici on, velocidad, aceleraci on,
etc.
En forma an aloga, un sistema de m ecuaciones diferenciales acopladas de orden n,
d
n
u
dt
n
= f(t, u,
du
dt
, . . . ,
d
n1
u
dt
n1
) (II.3.26)
donde u = (u
1
, . . . , u
m
), f = (f
1
, . . . , f
m
), puede reducirse a un sistema de m n
ecuaciones de primer orden, deniendo los n vectores
u
1
= u, u
2
=
du
dt
, . . . , u
n
=
d
n1
u
dt
n1
,
40
II.3 PROBLEMAS DE CONDICIONES INICIALES
ya que
du
1
dt
= u
2
,
du
2
dt
= u
3
, . . . ,
du
n
dt
= f(t, u
1
, . . . , u
n
) ,
lo cual constituye un sistema de mn ecuaciones de primer orden para el vector ampliado
y = (u
1
, . . . , u
n
) de mn coordenadas.
As, la ecuaci on que describe el movimiento de una partcula en el espacio tridimen-
sional sujeta a una fuerza F(t, r, dr/dt), es, seg un la segunda ley de Newton, un sistema
de 3 ecuaciones diferenciales de segundo orden en r = (x, y, z), lo que equivale a un siste-
ma de 6 ecuaciones diferenciales de primer orden en las variables (r, v = dr/dt). An alo-
gamente, la ecuaci on que describe el movimiento de n partculas en el espacio tridimen-
sional, sujetas a fuerzas F
i
(t, r
1
, dr
1
/dt, . . . , r
n
, dr
n
/dt), es un sistema de 3n ecuaciones
diferenciales de segundo orden para las 3n coordenadas r
i
= (x
i
, y
i
, z
i
), i = 1, . . . , n, lo
que equivale a un sistema de 6n ecuaciones diferenciales de primer orden en las variables
(r
i
, v
i
= dr
i
/dt), i = 1, . . . , n.
II.3.4. Reducci on en uno del orden de una ecuaci on diferencial ordi-
naria
Antes de comenzar a estudiar en detalle la resoluci on de sistemas de ecuaciones de
primer orden, es importante destacar que en algunos casos es posible reducir el orden sin
introducir nuevas variables. Consideremos la ecuaci on de segundo orden
d
2
u
dt
2
= f(t, u,
du
dt
).
Hemos visto que podemos transformarla en un sistema de dos ecuaciones de primer orden
deniendo u
1
= u, u
2
=
du
dt
, con
du
1
dt
= u
2
,
du
2
dt
= f(t, u
1
, u
2
). Por ejemplo,
m
d
2
x
dt
2
= F(t, x,
dx
dt
)
puede escribirse como
m
dx
dt
= p,
dp
dt
= F(t, x, p/m).
No obstante, en algunos casos es posible reducir el orden mediante t ecnicas elemen-
tales sin introducir nuevas variables. Por ejemplo, si f no depende de u,
d
2
u
dt
2
= f(t,
du
dt
)
puede llevarse a la ecuaci on de primer orden
dw
dt
= f(t, w)
deniendo w =
du
dt
. Si la soluci on es w(t, c), donde c es una constante de integraci on,
entonces u(t) =
_
w(t, c)dt +c
.
41
II.3 PROBLEMAS DE CONDICIONES INICIALES
Otro caso simple es aqu el en que f no depende de la variable independiente,
d
2
u
dt
2
= f(u,
du
dt
).
Deniendo w =
du
dt
, y considerando a w como funci on de u, tenemos
d
2
u
dt
2
=
dw
dt
=
dw
du
du
dt
= w
dw
du
y, por lo tanto,
w
dw
du
= f(u, w),
que es una ecuaci on de primer orden. Si la soluci on es w(u, c), podemos hallar u(t) de
dt = du/w(u, c), o sea,
t t
0
=
_
u
u
0
du
w(u, c)
,
que determina u(t) implcitamente. Este resultado es util para fuerzas que dependen s olo
de la posici on, en cuyo caso el mismo resultado puede obtenerse directamente de consi-
deraciones energ eticas.
El mismo procedimiento es tambi en v alido para reducir en 1 el orden de la ecuaci on
diferencial
d
n
u
dt
n
= f(u,
du
dt
, . . . ,
d
n1
u
dt
n1
).
Tenemos por ejemplo,
du
dt
= w,
d
2
u
dt
2
= w
dw
du
,
d
3
u
dt
3
= w
d
du
[w
dw
du
] = w[(
dw
du
)
2
+w
d
2
w
du
2
], y en general,
d
n
u
dt
n
ser a una funci on de las derivadas
hasta orden n 1 de w respecto de u. Se llega a una ecuaci on del tipo
d
n1
w
du
n1
= g(u, w, . . . ,
d
n2
w
du
n2
),
obteni endose luego u de t t
0
=
_
u
u
0
du
w(u,c
1
,...,c
n1
)
.
Ejemplo II.3.5: Consideremos la ecuaci on que describe el movimiento en una dimensi on
de una masa m bajo la acci on de una fuerza f(x),
m
d
2
x
dt
2
= f(x). (II.3.27)
Si p = m
dx
dt
m
d
2
x
dt
2
=
dp
dt
=
p
m
dp
dx
y la ecuaci on resulta equivalente a la ecuaci on de
primer orden
p
m
dp
dx
= f(x) .
Por lo tanto,
p
m
dp = f(x)dx y entonces,
p
2
2m
p
2
0
2m
=
_
x
x
0
f(x
)dx
= V (x
0
) V (x),
42
II.3 PROBLEMAS DE CONDICIONES INICIALES
donde V (x) =
_
f(x)dx es el potencial. Esta ecuaci on no es otra cosa que la conser-
vaci on de la energa mec anica,
p
2
2m
+ V (x) = E,
de donde p(x) =
_
2m[E V (x)]. De m
dx
dt
= p(x) obtenemos dt = m
dx
p(x)
y, nalmente,
t t
0
=
_
m
2
_
x
x
0
dx
_
E V (x)
. (II.3.28)
Ejemplo II.3.6: P endulo simple.
En este caso V (x) = mgl(1 cos ), con x = l. Reemplazando en
(II.3.27) se obtiene
d
2
dt
2
=
g
l
sin ,
que es una ecuaci on no lineal de segundo orden. La soluci on exacta de
esta ecuaci on est a dada, en forma implcita, por
t =
l
2g
_
0
d
cos
cos
m
, (II.3.29)
donde hemos escrito E = mgl[1cos(
m
)], con
m
. Podemos, de esta forma, obtener
tanto el perodo exacto T(
m
) = 4t(
m
) como tambi en la funci on t(), aun para grandes
amplitudes
m
, en t erminos de funciones elpticas. Por ejemplo, el perodo exacto es
T(
m
) = 4
l
2g
_
m
0
d
cos cos
m
= T
0
4
2
K[
1
2
m
, sen
2
(
1
2
m
)]
1 cos
m
, (II.3.30)
donde K denota la integral elptica de primera especie.
Para peque nos angulos, podemos aproximar cos 1
2
/2, y se obtiene de (II.3.29)
el resultado conocido t =
_
l/g arcsin(/
m
), es decir,
(t) =
m
sin(
_
g/l t) , (II.3.31)
que representa un movimiento arm onico simple, con perodo
T = T
0
= 2
_
l/g ,
independiente de la amplitud
m
. Este resultado corresponde a la aproximaci on lineal
sin en (II.3.32), que conduce a la ecuaci on lineal de segundo orden
d
2
dt
2
=
g
l
, (II.3.32)
43
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
f4 f2 3f4
m
1
2
3
TT
0
Figura 10: Gr aco del perodo exacto del p endulo, ecuaci on (II.3.30), en funci on de la am-
plitud
m
. Aqu T
0
= 2
_
l/g es el perodo obtenido en la aproximaci on lineal (II.3.32),
independiente de
m
(lnea horizontal). El perodo exacto tiende a innito para .
cuya soluci on general exacta puede obtenerse f acilmente con los m etodos que daremos
en las pr oximas secciones. La soluci on que satisface (0) = 0 y
(0) =
2
m
T
0
es, precisa-
mente, (II.3.31).
En el orden siguiente, el perodo comienza a depender de la amplitud. A partir de
(II.3.29) o (II.3.30) se obtiene
T = T
0
[1 +
2
m
/16 +O(
4
m
)] . (II.3.33)
Como se aprecia en la Fig. 10, la aproximaci on lineal es muy satisfactoria para
m
< /4.
No obstante, para valores de
m
cercanos a , la discrepancia se torna signicativa, ya
que el perodo exacto tiende a innito para
m
. Notemos nalmente que la ecuaci on
(II.3.29) es tambi en v alida para E > 2mgl (que corresponde a cos(
m
) < 1, o sea,
m
= +i).
II.4. Sistemas de ecuaciones lineales de primer orden
Un caso particularmente importante de sistema de primer orden es aqu el en que
f(t, u) es una funci on lineal de u. Como vimos en la secci on anterior, aun si f(t, u)
es no lineal en u, la aproximaci on lineal resulta de suma utilidad para estudiar en forma
analtica el comportamiento de la soluci on en torno a un punto de equilibrio u
0
.
Denici on II.4.1 Un sistema de ecuaciones ordinarias de primer orden del tipo (II.3.20)
se llama lineal, si puede escribirse en la forma
du
dt
= A(t)u +f(t) , (II.4.1)
44
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
donde
A(t) =
_
_
_
_
_
_
A
11
(t) ... A
1n
(t)
. ... .
. ... .
. ... .
A
n1
(t) ... A
nn
(t)
_
_
_
_
_
_
(II.4.2)
se denomina matriz del sistema.
Supondremos, adem as, que la condici on inicial est a dada por u(t
0
) = u
0
.
M as explcitamente, se tiene
du
i
(t)
dt
=
n
j=1
A
ij
(t)u
j
(t) + f
i
(t) i = 1, ..., n, (II.4.3)
con dados valores de u
i
(t
0
) para i = 1, ..., n .
II.4.1. Resoluci on del caso homog eneo. Matriz fundamental
Estudiaremos, primero, el sistema homog eneo,
du
dt
= A(t)u, (II.4.4)
o sea, L[u] = 0, con L =
d
dt
A(t). Probaremos un importante teorema:
Teorema II.4.2 Las soluciones del sistema lineal homog eneo (II.4.4) forman un espacio
vectorial de dimensi on n (propiedad de superposici on).
Es inmediato vericar que u = 0 es soluci on. En esas condiciones, que las soluciones
formen un espacio vectorial (o lineal) signica que, si u
1
(t) y u
2
(t) son soluciones, la
combinaci on lineal
u(t) = c
1
u
1
(t) +c
2
u
2
(t) (II.4.5)
es tambi en soluci on c
1
, c
2
(constantes). Que el espacio sea de dimensi on n signica
que existen exactamente n soluciones u
1
(t), u
2
(t), . . . , u
n
(t) linealmente independientes
t I
0
, tales que cualquier soluci on u(t) puede escribirse como combinaci on lineal de
las mismas:
u(t) =
n
j=1
c
j
u
j
(t) (II.4.6)
donde los coecientes c
j
son constantes.
Demostraci on: Dado que el operador L en (II.4.4) es lineal, la combinaci on (II.4.5)
ser a, obviamente, soluci on de (II.4.4) si u
1
(t) y u
2
(t) son soluciones.
45
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Mostraremos ahora que existen n y s olo n soluciones u
j
(t) linealmente independien-
tes. Dado que u posee n componentes, podemos encontrar n vectores linealmente inde-
pendientes u
0
j
. Por ejemplo,
u
0
1
=
_
_
_
_
1
0
. . .
0
_
_
_
_
u
0
2
=
_
_
_
_
0
1
. . .
0
_
_
_
_
. . . u
0
n
=
_
_
_
_
0
0
. . .
1
_
_
_
_
. (II.4.7)
Para j = 1, . . . , n, sea
u
j
(t) =
_
_
_
_
u
1j
(t)
u
2j
(t)
. . .
u
nj
(t)
_
_
_
_
la soluci on del sistema (II.4.4) con la condici on inicial u
j
(t
0
) = u
0
j
. Por el teorema de
existencia, tal soluci on existe y es unica para [t t
0
[ r (o sea, t I
0
).
Consideremos ahora una soluci on arbitraria u(t) con la condici on inicial u(t
0
) =
u
0
. Para t = t
0
, como los vectores u
j
(t
0
) = u
0
j
forman una base, podemos escribir
u(t
0
) =
n
j=1
c
j
u
j
(t
0
). (II.4.8)
Debido a la linealidad del espacio,
n
j=1
c
j
u
j
(t) satisface la ecuaci on diferencial y la
condici on inicial. Pero, como la soluci on para una determinada condici on inicial es uni-
ca, debe cumplirse
u(t) =
n
j=1
c
j
u
j
(t) (II.4.9)
t I
0
, ya que el segundo miembro de (II.4.9) es tambi en soluci on de (II.4.4) y cumple
la condici on inicial. Esto muestra que la dimensi on del espacio no es mayor que n.
Falta mostrar que las n soluciones u
j
(t) permanecen linealmente independientes
t I
0
. Si, por ejemplo, para t = t
1
I
0
, las soluciones fuesen linealmente dependientes,
entonces existira una soluci on del tipo (II.4.9), con (c
1
, c
2
, . . . , c
n
) no todos nulos, que
sera nula para t = t
1
:
u(t
1
) =
n
j=1
c
j
u
j
(t
1
) = 0.
Pero, como tambi en existe la soluci on trivial u(t) = 0 t I
0
, por unicidad la soluci on
anterior debe coincidir con la soluci on trivial t I
0
y por lo tanto, c
1
= c
2
= . . . =
c
n
= 0, en contradicci on con lo supuesto. Las soluciones permanecen, pues, linealmente
independientes.
46
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Podemos formalizar algo m as los resultados anteriores. Una matriz de soluciones li-
nealmente independientes
U(t) =
_
_
_
_
u
11
(t) u
12
(t) . . . u
1n
(t)
u
21
(t) u
22
(t) . . . u
2n
(t)
. . .
u
n1
(t) u
n2
(t) . . . u
nn
(t)
_
_
_
_
, (II.4.10)
donde la columna j- esima contiene las componentes de la soluci on u
j
(t), se denomina
matriz fundamental del sistema. Como du
j
/dt = A(t)u
j
(t), con u
j
(0) = u
0
j
, la matriz
U(t) satisface la ecuaci on
dU
dt
= A(t)U(t), con U(t
0
) = U
0
, (II.4.11)
donde U
0
es la matriz que contiene las n condiciones iniciales linealmente independientes
u
0
j
(U
0
= I (matriz identidad) en el caso (II.4.7)). Recordando que n vectores son lineal-
mente independientes si y s olo si el determinante de sus componentes es no nulo, tenemos
Det[U(t
0
)] ,= 0, y por el teorema anterior, Det[U(t)] ,= 0 t I
0
.
La soluci on general de (II.4.4) puede expresarse como
u(t) = U(t)c, (II.4.12)
donde c es un vector constante, lo cual es otra forma de escribir (II.4.9). La soluci on
particular para la condici on inicial u(t
0
) = u
0
se obtiene para c = U
1
(t
0
)u
0
:
u(t) = U(t)U
1
(t
0
)u
0
K(t, t
0
)u
0
,
ya que satisface u(t
0
) = u
0
. Aqu hemos denido K(t, t
0
), que es la llamada matriz
fundamental del sistema y permite resolver el problema homog eneo para condiciones
iniciales arbitrarias. Obs ervese que K(t, t
0
) satisface la ecuaci on homog enea y, para t =
t
0
, se reduce a la matriz identidad. Para las condiciones iniciales (II.4.7), U(t
0
) = I y
u(t) = U(t)u
0
(En este caso, K(t, t
0
) = U(t)).
Utilizando el m etodo de Picard, podemos expresar, en general, U(t) para t I
0
como
U(t) = [I +
_
t
t
0
A(t
)dt
+
_
t
t
0
A(t
)dt
_
t
t
0
A(t
)dt
+. . . ]U
0
. (II.4.13)
II.4.2. Evoluci on del determinante
Podemos calcular explcitamente Det[U(t)] y vericar que Det[U(t)] ,= 0 si Det[U(t
0
)] ,=
0. Para ello, notemos primero que si t es un par ametro cualquiera de U, tenemos
d
dt
Det[U] =
n
i,j=1
dU
ij
dt
U
ji
= Tr
_
dU
dt
U
_
, (II.4.14)
47
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
donde
U
ji
= (1)
i+j
Det[U
(i,j)
] y U
(i,j)
es la matriz con la la i y columna j de U
suprimidas, tal que
U
U = Det[U] I
y Tr es la traza. Por lo tanto, en el caso (II.4.4),
d
dt
Det[U] = Tr[A(t)U
U] = Det[U]Tr[A(t)] ,
lo que constituye una ecuaci on diferencial lineal ordinaria para Det[U(t)]. Obtenemos,
entonces,
Det[U(t)] = Det[U(t
0
)] e
t
t
0
Tr[A(t
)]dt
,
con Det[U(t
0
)] = Det[U
0
] ,= 0. Por lo tanto, Det[U(t)] ,= 0 t I
0
, de modo que las
soluciones permanecen linealmente independientes, como habamos demostrado.
II.4.3. Resoluci on del caso no homog eneo. Matriz de Green
Volvamos ahora al sistema lineal original (II.4.1). Si U(t) es la matriz fundamental
del sistema homog eneo (II.4.4), podemos plantear una soluci on particular del tipo
u(t) = U(t)c(t) .
Dado que dU/dt = A(t)U, tenemos:
du
dt
=
dU
dt
c + U
dc
dt
= A(t)Uc + U
dc
dt
= A(t)u + U
dc
dt
.
Por lo tanto,
du
dt
A(t)u = U(t)
dc
dt
= f(t) ,
de donde resulta dc/dt = U
1
(t)f(t) y, por lo tanto,
c(t) = c
0
+
_
U
1
(t)f(t)dt
La soluci on general es, entonces, de la forma
u(t) = U(t)c
0
+ U(t)
_
U
1
(t)f(t)dt (II.4.15)
y la soluci on particular para u(t
0
) = u
0
es
u(t) = U(t)U
1
(t
0
)u
0
+U(t)
_
t
t
0
U
1
(t
)f(t
)dt
= K(t, t
0
)u
0
+
_
t
t
0
K(t, t
)f(t
)dt
, (II.4.16)
48
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
con
K(t, t
) = U(t)U
1
(t
) . (II.4.17)
Notemos que K(t, t
) satisface
dK(t, t
)
dt
= A(t)K(t, t
), con K(t
, t
) = I . (II.4.18)
Observemos que el primer t ermino de (II.4.16) es la soluci on del sistema homog eneo
que satisface la condici on inicial. El segundo, que se anula para t = t
0
, es una soluci on
particular del sistema inhomog eneo, construida en base a n soluciones particulares del
sistema homog eneo (las soluciones fundamentales). La ecuaci on (II.4.16) generaliza y
es completamente an aloga a la ecuaci on (II.2.42) de II.2.4, v alida para el caso de una
ecuaci on, en cuyo caso U(t) = u
h
(t) es una matriz de 1 1 (con u
h
(t) una soluci on no
nula de la ecuaci on homog enea) y K(t, t
) = u
h
(t)/u
h
(t
).
Notemos tambi en que, si u
1
(t) y u
2
(t) son soluciones particulares para f
1
(t) y f
2
(t),
u(t) = c
1
u
1
(t) + c
2
u
2
(t) es una soluci on particular para f(t) = c
1
f
1
(t) + c
2
f
2
(t)
(extensi on de la propiedad de superposici on). Esto puede verse de (II.4.16) o tambi en,
directamente, de (II.4.1) por la linealidad de L. Podemos, por lo tanto, descomponer la
fuerza en varios t erminos o componentes y luego sumar las soluciones para cada una de
ellas. Asimismo, si f(t) se multiplica por un factor , la soluci on particular se multiplica
por el mismo factor. La soluci on particular responde, por lo tanto, en forma proporcional
a f.
Consideremos, en detalle, la soluci on para condici on inicial nula:
u(t) =
_
t
t
0
K(t, t
)f(t
)dt
. (II.4.19)
Si, adem as, f(t) = 0 t < 0 y el sistema est a en equilibrio para t < t
0
, con u(t) = 0
t < t
0
, puede escribirse
u(t) =
_
t
K(t, t
)f(t
)dt
(II.4.20)
o, equivalentemente,
u(t) =
_
G(t, t
)f(t
)dt
, (II.4.21)
donde hemos denido
G(t, t
)
_
0 t
0
t < t
K(t, t
) t
0
t
< t
. (II.4.22)
La matriz G se llama matriz de Green del sistema de ecuaciones. Como se ve, permite
establecer el efecto, en un dado valor de t, de una fuente que act ua en cualquier t
< t.
49
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Dado que, para problemas de valores iniciales, la variable t es, en general, el tiempo, suele
llamarse a G(t, t
) as denida la funci on de Green causal. N otese que es discontinua en
t = t
(lm
tt
+ = I; lm
tt
= 0).
Escribiendo explcitamente los elementos de matriz, se tiene
u
i
(t) =
n
j=1
_
G
ij
(t, t
)f
j
(t
)dt
, (II.4.23)
con
G
ij
(t, t
) =
_
0 0 t < t
K
ij
(t, t
) =
n
k=1
U
ik
(t)U
1
kj
(t
) 0 t
< t .
. (II.4.24)
II.4.4. Sistemas lineales con coecientes constantes
Estudiaremos ahora el caso muy importante en el que la matriz A en (II.4.1) es in-
dependiente de t, es decir, A
ij
(t) = A
ij
, constante i, j. El sistema de ecuaciones ho-
mog eneo
du
dt
= Au (II.4.25)
es, ahora, invariante frente a traslaciones temporales t t + c. Por lo tanto, podemos
tomar, sin p erdida de generalidad, t
0
= 0, ya que si u(t) es la soluci on de (II.4.25) para
u(0) = u
0
u(t t
0
) ser a la soluci on de (II.4.4) para u(t
0
) = u
0
. Los sistemas que no
dependen explcitamente del tiempo se denominan aut onomos y exhiben obviamente la
propiedad anterior.
Antes de considerar la soluci on general, notemos que si planteamos una soluci on par-
ticular de (II.4.25) de la forma
u(t) = ve
t
, (II.4.26)
donde y v son independienes de t, con v un vector no nulo, reemplazando en (II.4.25)
obtenemos la ecuaci on ve
t
= Ave
t
, o sea que,
Av = v . (II.4.27)
Esta es, precisamente, la ecuaci on de autovalores asociada a la matriz A (v ease Ap endice
A): debe ser autovalor de A, siendo determinado por la ecuaci on
Det [A I] = 0 ,
y v debe ser un autovector asociado, es decir, un vector que satisface
(A I)v = 0, v ,= 0.
An alogamente, si es autovalor y v un autovector asociado, (II.4.26) ser a soluci on de
(II.4.25). En otras palabras, tenemos el Teorema: u(t) = ve
t
ser a soluci on no nula de
(II.4.25) si y s olo si es autovalor de A y v un autovector asociado.
50
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Si la matriz A es diagonalizable (ver Ap endice A), existen n autovectores linealmente
independientes v
k
asociados a autovalores
k
, no necesariamente distintos. Obtenemos
as n soluciones linealmente independientes de (II.4.25),
u
k
(t) = v
k
e
k
t
, k = 1, . . . , n, (II.4.28)
que permiten construir una matriz fundamental de la forma
U(t) =
_
v
1
e
1
t
, . . . , v
n
e
n
t
_
. (II.4.29)
La soluci on general del sistema es entonces
u(t) = U(t)c
= c
1
v
1
e
1
t
+ . . . + c
n
v
n
e
n
t
. (II.4.30)
N otese que
k
puede ser real o complejo, aun si la matriz A es real. Si es real, los
autovalores complejos aparecer an en pares conjugados, con autovectores tambi en conju-
gados:
Av
k
=
k
v
k
A v
k
=
k
v
k
,
donde
k
=
r
k
+ i
i
k
,
k
=
r
k
i
i
k
. En este caso, tanto la parte real como la parte
imaginaria de v
k
e
k
t
ser an soluciones reales (y linealmente independientes si
i
k
,= 0) del
sistema. Cada par de autovalores complejos conjugados origina pues el par de soluciones
reales linealmente independientes
u
r
k
(t) = Re [v
k
e
k
t
], u
i
k
(r) = Im[v
k
e
k
t
] ,
de elementos
u
r
jk
= [v
jk
[e
r
k
t
cos(
i
k
t +
jk
) , u
i
jk
= [v
jk
[e
r
k
t
sen (
i
k
t +
jk
) ,
donde hemos escrito v
jk
= [v
jk
[e
i
jk
. La parte imaginaria
i
k
de
k
representa obviamente
una frecuencia angular.
Para tratar el caso general, en el que la matriz A no es necesariamente diagonalizable,
volvemos al tratamiento general anterior.
II.4.5. Soluci on fundamental general en el caso constante
Si la matriz A es constante, la ecuaci on (II.4.13) conduce a
U(t) = [I +At + A
2
t
2
2!
+ . . .]U
0
=
_
n=0
A
n
t
n
n!
_
U
0
= exp[At]U
0
, (II.4.31)
51
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
donde hemos introducido la exponencial de una matriz,
exp[A]
m=0
(A)
m
m!
= I +A +
A
2
2
+ . . . (II.4.32)
Esta serie converge matriz cuadrada Ade nn (si [A
ij
[ K i, j [(A
2
)
ij
[ nK
2
y
en general, [(A
m
)
ij
[ (nK)
m
/n, por lo que [[exp(A)]
ij
[ 1 +(e
nK
1)/n)). Podemos
vericar que (II.4.31) es la soluci on de (II.4.11) t. En efecto,
d
dt
exp[At] =
d
dt
m=0
A
m
t
m
m!
=
m=1
A
m
t
m1
(m1)!
= Aexp[At] .
La soluci on general de la ecuaci on homog enea puede, pues, escribirse como
u(t) = exp[At]c (II.4.33)
y la soluci on particular para u(t
0
) = u
0
es
u(t) = exp[A(t t
0
)]u
0
.
La soluci on de la ecuaci on inhomog enea para u(t
0
) = u
0
es entonces
u(t) = exp[A(tt
0
)]u
0
+
_
t
t
0
exp[A(tt
)]f(t
)dt
, (II.4.34)
que corresponde a K(t, t
) = exp[A(t t
)] en (II.4.16).
Nota: Para matrices A y B generales,
exp[A + B] ,= exp[A] exp[B] ,= exp[B] exp[A] .
La igualdad se cumple s olo si A conmuta con B, o sea, si [A, B] AB BA = 0. Por
ejemplo,
exp[A] exp[A] = exp[A A] = exp[0] = I .
Por lo tanto, la inversa de exp[A] es exp[A]. Adem as,
exp[A(t t
)] = exp[At At
] = exp[At] exp[At
] .
52
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
II.4.6. El caso diagonalizable
Veamos c omo evaluar exp[At]. Si A es diagonal, es decir A
ij
=
i
ij
(A
m
)
ij
=
m
i
ij
es tambi en diagonal m y por lo tanto exp[At] es diagonal, con (exp[At])
ij
=
e
ij
. En tal caso, el sistema (II.4.4) es desacoplado, y las soluciones son, obviamente,
u
i
(t) = u
i
(0)e
i
t
, que pueden escribirse como u(t) = exp[At]u(0).
En general, si existe una matriz V de n n no singular tal que
A = V DV
1
, (II.4.35)
con D diagonal,
D =
_
_
_
_
1
0 . . . 0
0
2
. . . 0
. . .
0 0 . . .
n
_
_
_
_
,
la matriz A se dice que es diagonalizable (En el Ap endice A se resumen los conceptos
fundamentales sobre diagonalizaci on de matrices). En tal caso los elementos diagonales
i
son necesariamente los autovalores de A y las columnas de V son los autovectores
asociados:
V =
_
v
1
, . . . , v
n
_
, con Av
k
=
k
v
k
, k = 1, . . . , n,
tal que AV = V D.
Utilizando (II.4.35) tenemos A
2
= (V A
V
1
)
2
=V A
V
1
V A
V
1
=V A
2
V
1
, y en
general, A
m
= (V A
V
1
)
m
= V A
m
V
1
, por lo que
exp[At] = exp[V (Dt)V
1
] = V exp[Dt]V
1
, (II.4.36)
con
exp[Dt] =
_
_
_
_
e
1
t
0 . . . 0
0 e
2
t
. . . 0
. . .
0 0 . . . e
n
t
_
_
_
_
.
La evaluaci on de exp[At] es, entonces, inmediata. Se reobtiene as la soluci on general
(II.4.30):
u(t) = exp[At] c = V exp[Dt]c
=
n
k=1
c
k
v
k
e
k
t
, (II.4.37)
donde c = V
1
c = (c
1
, . . . , c
n
)
t
es un vector de constantes arbitrarias. La expresi on
soluci on (II.4.37) coincide con la soluci on previamente hallada (II.4.30).
Si u(0) = v
k
(autovector de A) c
j
=
jk
y
u(t) = v
k
e
k
t
. (II.4.38)
53
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
La soluci on u(t) permanece, en este caso, proporcional a u(0) y tiene una evoluci on de
tipo exponencial (real o compleja).
La transformaci on (II.4.35) (denominada transformaci on de semejanza) corresponde
a un cambio de base. Para una matriz V no singular arbitraria de n n, el vector
u = V
1
u, (II.4.39)
de componentes u
i
=
j
V
1
ij
u
j
, satisface la ecuaci on
d u
dt
= A
u, A
= V
1
AV . (II.4.40)
Si para una matriz A diagonalizable, elegimos V como la matriz de autovectores, A
es la
matriz diagonal D de autovalores y el sistema (II.4.40) queda desacoplado:
d u
k
dt
=
k
u
k
, k = 1, . . . , n.
Podemos, entonces, desacoplar el sistema original (II.4.4) mediante la transformaci on
lineal (II.4.39). Las nuevas variables u
k
pueden interpretarse como las coordenadas de la
soluci on en la base que diagonaliza la matriz A (base de autovectores), y son las coorde-
nadas normales del sistema. La ecuaci on u(t) = V u(t) conduce a (II.4.37).
Ejemplo II.4.1: Consideremos el sistema
_
dx
dt
= ax +by
dy
dt
= ay + bx
. (II.4.41)
Podemos escribirlo en la forma
du
dt
= Au, u =
_
x
y
_
, A =
_
a b
b a
_
.
La ecuaci on caracterstica es Det[A I] = (a )
2
b
2
= 0, y sus races son
= a b .
Resolviendo la ecuaci on Av = v obtenemos los autovectores v
=
1
2
_
1
1
_
,
que son ortogonales, v
+
v
= 0, y est an normalizados: v
+
v
+
= v
= 1 (o sea,
son ortonormales). La soluci on general de (II.4.41) es, seg un (II.4.37),
u(t) = c
+
v
+
e
(a+b)t
+ c
e
(ab)t
,
es decir, deniendo
= c
2,
x(t) =
+
e
(a+b)t
e
(ab)t
, y(t) =
+
e
(a+b)t
+
e
(ab)t
. (II.4.42)
Para [b[ < [a[, el acoplamiento b puede pensarse como una perturbaci on que produce
un desdoblamiento del ritmo de crecimiento (a > 0) o decaimiento (a < 0) de x e y,
originando dos componentes en la soluci on general para estas variables.
54
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Podemos obtener las soluciones anteriores directamente planteando una soluci on del
tipo u = ve
t
, lo que conduce a la ecuaci on de autovalores Av = v.
Escribiendo A = V A
V
1
, con
A
=
_
a+b 0
0 ab
_
, V =
1
2
_
1 1
1 1
_
, V
1
=
1
2
_
1 1
1 1
_
obtenemos, tambi en,
exp[At] = V exp[A
t]V
1
= e
at
_
cosh(bt) sinh(bt)
sinh(bt) cosh(bt)
_
.
Las columnas de esta matriz son las soluciones u
1
(t), u
2
(t), que satisfacen u
1
(0) = (
1
0
),
u
2
(0) = (
0
1
), y corresponden a
+
=
= 1/2 y
+
=
= 1/2 en (II.4.42). Si
x(0) = x
0
, y(0) = 0, la soluci on es x
0
u
1
(t), o sea,
x(t) = x
0
e
at
cosh(bt), y(t) = x
0
e
at
sinh(bt) . (II.4.43)
Debido al acoplamiento b, y(t) adquiere un valor no nulo al aumentar t.
Las soluciones (II.4.42) pueden interpretarse mejor en t erminos de las nuevas variables
_
x
y
_
= V
1
_
x
y
_
=
1
2
_
x + y
x + y
_
,
que satisfacen las ecuaciones desacopladas
d x
dt
= (a + b) x
d y
dt
= (a b) y . (II.4.44)
Las soluciones de (II.4.44) son, obviamente,
x(t) = c
+
e
(a+b)t
, y(t) = c
e
(ab)t
. (II.4.45)
Como (
x
y
) = ( x y)/
2, las soluciones (II.4.42) se obtienen inmediatamente de (II.4.45).
Las constantes c
no son otra cosa que los valores iniciales x(0), y(0).
Las f ormulas anteriores permanecen v alidas para matrices A complejas. Por ej., la
ecuaci on de Schr odinger para un sistema de dos niveles degenerados de energa con
acoplamiento es
i
du
dt
= Hu, H =
_
_
,
donde H es la matriz que representa al Hamiltoniano y u(t) la funci on de onda. Corres-
ponde a a = i/, b = i/ en (II.4.41). La ecuaci on (II.4.43) conduce a
[x(t)[
2
= [x
0
[
2
cos
2
(t/), [y(t)[
2
= [x
0
[
2
sin
2
(t/) .
Debido a la interacci on, el sistema oscila entre los dos niveles con frecuencia f =
2
.
55
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Problema sugerido II.4.1:
i) Determinar el movimiento de una partcula no relativista de carga q bajo la acci on
de la fuerza de Lorentz. Sugerencia: Resolver el sistema lineal de primer orden mdv/dt =
qv B, y mostrar que las trayectorias son espirales.
ii) Suponer que se a nade ahora un campo el ectrico constante en la direcci on: a) del
campo magn etico y b) perpendicular al campo magn etico. Resolver el sistema y describir
el movimiento resultante en cada caso.
Problema guiado II.4.2: Trayectorias en el plano de fase
Consideremos el sistema lineal homog eneo de primer orden,
_
dx/dt = ax + by
dy/dt = cx + dy
a, b, c, d R (II.4.46)
Las soluciones reales x(t), y(t) del sistema pueden visualizarse gracando las trayecto-
rias (x(t), y(t)) en el plano x, y, denominado normalmente plano (o espacio) de fase.
a) Mostrar que las trayectorias no pueden cruzarse para tiempos t nitos.
b) Probar que la ecuaci on diferencial que dene las trayectorias es
dy
dx
=
cx+dy
ax+by
.
c) Mostrar que si (
x(0)
y(0)
) coincide con un autovector de la matriz asociado a un autovalor
real ,= 0, la trayectoria es recta. Indicar en qu e casos se alejar a y y cuando se acercar a al
origen al aumentar t. d) Considere ahora a = d = , b = c = . Graque e interprete
las trayectorias para: i) = 1, = 1/2, ii) = 1, = 1/2, iii) = 1, = 2.
Identique los casos en que el origen (x, y) = (0, 0) es un punto de equilibrio estable y
aquellos en que es inestable.
e) Considere ahora a = d = , c = b = , caso en el que los autovalores de la matriz
son complejos. Graque e interprete las trayectorias para:
i) = 1, = 1, ii) = 1, = 1, iii) = 0, = 1. Muestre que en este ultimo caso
las trayectorias son crculos centrados en el origen.
56
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
4 2 2 4
x
4
2
2
4
y
4 2 2 4
x
4
2
2
4
y
4 2 2 4
x
4
2
2
4
y
1 2 3
4 2 2 4
x
4
2
2
4
y
4 2 2 4
x
4
2
2
4
y
4 2 2 4
x
4
2
2
4
y
4 5 6
Figura 11: Gr acos de las soluciones del sistema (II.4.46) para a = d, [[ = [[. Las
echas indican el sentido del movimiento. Los gr acos corresponden a: 1) Ambos auto-
valores reales y positivos, 2) Ambos reales y negativos, 3) Uno positivo y uno negativo, 4)
Complejos con parte real negativa, 5) Complejos con parte real positiva, 6) Imaginarios.
II.4.7. Evaluaci on de exp[At] en el caso no diagonalizable
Una matriz cuadrada arbitraria puede siempre descomponerse en la forma A = V A
V
1
,
con
A
=
_
_
_
_
D
1
0 . . . 0
0 D
2
. . . 0
. . .
0 0 . . . D
m
_
_
_
_
,
donde D
k
son bloques de n
k
n
k
de la forma
D
k
=
_
_
_
_
k
1 0 . . .
0
k
1 . . .
. . .
0 . . . 0
k
_
_
_
_
=
k
I
k
+ J
k
, J
k
=
_
_
_
_
0 1 0 . . .
0 0 1 . . .
. . . 1
0 . . . 0 0
_
_
_
_
,
57
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
con
k
autovalor de A(Det[A
k
I] = 0) y I
k
la identidad de n
k
n
k
(
m
k=1
n
k
= n). Es-
ta forma se denomina descomposici on de Jordan (o forma can onica de Jordan), y el caso
diagonalizable corresponde a n
k
= 1 k. En este ultimo caso, la multiplicidad algebraica
m
a
() de cada autovalor (multiplicidad como raz del polinomio caracterstico) coincide
con la multiplicidad geom etrica m
g
() (dimensi on del espacio propio asociado, es decir,
n umero de autovectores linealmente independientes asociados a ): m
g
() = m
a
(). En
cambio, en el caso no diagonalizable, m
g
() < m
a
().
Como AV = V A
, las columnas v
k
i
de V correspondientes al bloque k quedan deter-
minadas, si n
k
2, por
Av
k
1
=
k
v
k
1
, Av
k
i
=
k
v
k
i
+v
k
i1
, i = 2. . . . , n
k
. (II.4.47)
La base de Jordan del bloque k puede, pues, obtenerse comenzando con un vector semi-
lla v
k
n
k
no nulo que satisface
(A I)
n
k
v
k
n
k
= 0, (A I)
n
k
1
v
k
n
k
,= 0,
obteni endose luego los vectores v
k
i
como
v
k
i
= (A I)
n
k
i
v
k
n
k
, i = 1, . . . , n
k
1 ,
con v
k
1
autovector de A asociado a . Cada bloque contiene, pues, un solo autovector.
La descomposici on de Jordan permite evaluar exp[At] f acilmente. La matriz J
k
es
nilpotente: J
n
k
k
= 0. Por lo tanto, como [I
k
, J
k
] = 0,
exp[D
k
t] = exp[
k
I
k
t] exp[J
k
t]
= e
k
t
[I
k
+ J
k
t + . . . +
(J
k
t)
n
k
1
(n
k
1)!
]
= e
k
t
_
_
_
_
_
_
1 t . . . t
n
k
1
/(n
k
1)!
0 1 . . . t
n
k
2
/(n
k
2)!
. . . . . . . . .
0 0 . . . t
0 0 . . . 1
_
_
_
_
_
_
. (II.4.48)
Se obtiene, entonces,
exp[At] = V
_
_
_
_
e
D
1
t
0 . . . 0
0 e
D
2
t
. . . 0
. . .
0 0 . . . e
D
m
t
_
_
_
_
V
1
.
La soluci on general (II.4.33) es, por lo tanto, de la forma
u(t) = V exp[A
t]c =
m
k=1
n
k
i=1
c
k
i
v
k
i
(t) ,
58
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
con c = V
1
c y v
k
i
las soluciones particulares
v
k
1
(t) = e
k
t
v
k
1
, v
k
2
(t) = e
k
t
(v
k
2
+ tv
k
1
) , v
k
3
(t) = e
k
t
(v
k
3
+ tv
k
2
+
t
2
2!
v
k
1
) , . . .
es decir,
v
k
i
(t) = e
k
t
i
j=1
v
k
j
t
ij
(i j)!
, i = 1, . . . , n
k
. (II.4.49)
Cada bloque genera as n
k
soluciones linealmente independientes v
k
1
(t), . . . , v
k
n
k
(t), y
el n umero total de soluciones linealmente independientes generadas por un autovalor
coincide siempre con su multiplicidad algebraica m
a
().
La soluci on (II.4.49) es una suma de exponenciales e
k
t
multiplicadas por potencias
de t menores que n
k
. Esta soluci on puede interpretarse en t erminos del vector u = V
1
u,
que satisface la ecuaci on d u/dt = A
u, o sea,
d u
k
i
dt
=
k
u
k
i
+ u
k
i+1
, i = 1, . . . , n
k
1,
d u
k
n
k
dt
=
k
u
k
n
k
, (II.4.50)
para el bloque k. Las soluciones de este sistema son precisamente las columnas de la ma-
triz (II.4.48). No es posible ahora desacoplar completamente el sistema. La forma (II.4.50)
es la representaci on mnimamente acoplada del mismo.
Observemos que, si se desea resolver el caso no diagonalizable en forma directa, ante
la presencia de un autovalor con m
g
() < m
a
(), se debe proponer, adem as de la
soluci on exponencial ve
t
, una segunda soluci on de la forma
u(t) = e
t
(w +tv) .
Al reemplazarla en el sistema du/dt = Au, se obtienen las ecuaciones
Av = v, Aw = w +v , (II.4.51)
que implican que v debe ser autovector de Aasociado a y wel segundo vector de la base
de Jordan asociada al bloque generado por el autovector v (o sea, v = v
1
, w = v
2
). Si
a un no se obtienen m
a
() soluciones linealmente independientes, se propone una nueva
soluci on de la forma
u(t) = e
t
(v
m
+v
m1
t + . . . +v
1
t
m1
(m1)!
) , (II.4.52)
con m = 2 que, al reemplazarla en el sistema, conduce a las ecuaciones de Jordan
(II.4.47). De ser necesario, se sigue proponiendo soluciones de la forma (II.4.52) com
m = 3, 4, etc., hasta obtener m
a
() soluciones linealmente independientes.
59
II.4 SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Finalmente notemos que, en un sistema de 2 2 no diagonalizable, D = I
2
+ J
2
,
con el unico autovalor de A, por lo que A = V (I
2
+J
2
)V
1
= I
2
+V J
2
V
1
. Por lo
tanto,
exp[At] = e
t
V (I
2
+ J
2
t)V
1
= e
t
[I
2
+ t(A I
2
)] , (II.4.53)
lo que evita tener que hallar explcitamente la base de Jordan.
Ejemplo II.4.2:
dx
dt
= ax +by,
dy
dt
= ay . (II.4.54)
En este caso
A =
_
a b
0 a
_
= aI
2
+ bJ
2
y la ecuaci on caracterstica Det[A I
2
] = (a )
2
= 0, posee una unica raz = a.
Esta matriz no es diagonalizable. No obstante,
exp[At] = exp[aI
2
t] exp[bJ
2
t] =
_
e
at
be
at
t
0 e
at
.
_
(II.4.55)
La primera columna nos da la soluci on que satisface u
1
(0) = (
1
0
) y la segunda u
2
(0) =
(
0
1
). La soluci on general puede entonces escribirse como
u(t) = c
1
e
at
v
1
+ c
2
e
at
(v
2
+ tv
1
) , (II.4.56)
con v
1
=
_
1
0
_
, v
2
=
_
0
b
1
_
, que satisfacen Av
1
= v
1
, Av
2
= v
2
+v
1
. El sistema
(II.4.54) puede tambi en tratarse en forma elemental resolviendo primero la ecuaci on para
y y luego la ecuaci on para x, considerando a by como t ermino no homog eneo.
Nota. La matriz A = (
a b
a
) es diagonalizable si b ,= 0, ya que en tal caso posee
dos autovalores distintos: La ecuaci on Det[A I] = ( a)
2
b = 0 conduce a
= a
b, con autovectores v
= (
1
/b
), obteni endose
exp[At] = e
at
_
cosh(rt)
b
r
sinh(rt)
r
b
sinh(rt) cosh(rt)
_
, r =
b .
Tomando el lmite r 0 se obtiene la ecuaci on (II.4.55), ya que la soluci on para un t jo
arbitrario es una funci on continua de los par ametros que denen la matriz del sistema.
II.4.8. Exponencial en el caso A(t) variable
Ahora que sabemos exponenciar matrices, podemos volver al sistema de ecuaciones
lineales general (II.4.4).
60
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Si [A(t), A(t
)] = 0 t, t
I
0
, obtenemos
U(t) = exp
__
t
t
0
A(t
)dt
_
U
0
. (II.4.57)
En efecto, en este caso no importa el orden temporal en los t erminos del desarrollo
(II.4.13). Se obtiene
_
t
t
0
A(t
)dt
_
t
t
0
A(t
)dt
=
1
2
_
t
t
0
A(t
)dt
_
t
t
0
A(t
)dt
,
ya que A(t
)A(t
) = A(t
)A(t
). An alogamente,
_
t
t
0
A(t
1
)dt
1
_
t
1
t
0
A(t
2
)dt
2
. . .
_
t
n1
t
0
A(t
n
)dt
n
=
1
n!
_
t
t
0
A(t
1
)dt
1
_
t
t
0
A(t
2
)dt
2
. . .
_
t
t
0
A(t
n
)dt
n
y, por lo tanto, el desarrollo (II.4.13) conduce a (II.4.57).
En el caso general, la ecuaci on (II.4.13) suele escribirse como
U(t) =
T exp
__
t
t
0
A(t
)dt
_
U
0
, (II.4.58)
donde
T es el operador de ordenamiento temporal:
T[A(t)A(t
)]
A(t)A(t
) si t>t
A(t
)A(t) si t<t
, con
una denici on an aloga para un producto de m as de dos t erminos.
II.5. Ecuaciones diferenciales lineales de orden n
Como ya hemos visto, toda ecuaci on diferencial ordinaria de orden n, dadas condi-
ciones iniciales sobre las primeras n 1 derivadas, puede reducirse a un sistema de n
ecuaciones de primer orden con una cierta condici on inicial. En particular, esto es cierto
para las ecuaciones lineales. Consideremos, primero, la ecuaci on homog enea de orden n
d
n
u
dt
n
+a
n1
(t)
d
n1
u
dt
n1
+. . .+a
1
(t)
du
dt
+a
0
(t)u = 0 . (II.5.1)
con condiciones iniciales dadas sobre u,
du
dt
, ...
d
n1
u
dt
n1
. Escribiendo
u =
_
_
_
_
u
du
dt
. . .
d
n1
u
dt
n1
_
_
_
_
,
la ecuaci on (II.5.1) es equivalente al sistema lineal de primer orden
du
dt
= A(t)u, A =
_
_
_
_
_
_
0 1 0 . . .
0 0 1 . . .
. . .
. . . 0 1
a
0
(t) a
1
(t) . . . a
n1
(t),
_
_
_
_
_
_
(II.5.2)
61
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
con la condici on inicial u(t
0
) =
_
_
_
_
u(t
0
)
du
dt
(t
0
)
. . .
d
n1
u
dt
n1
(t
0
)
_
_
_
_
.
Si los coecientes a
i
(t) son continuos en un intervalo I
0
, los teoremas de existencia
y superposici on aseguran la existencia de n soluciones linealmente independientes u
i
(t)
para t I
0
. Esto implica aqu la existencia de n soluciones linealmente independientes
u
1
(t), . . . , u
n
(t) ,
de (II.5.1), ya que las siguientes componentes de u
i
(t) son las derivadas de la primera
componente u
i
(t). En otras palabras, el conjunto de soluciones de (II.5.1) es un espacio
vectorial de dimensi on n, y la soluci on general de (II.5.1) es
u(t) = c
1
u
1
(t) +. . . + c
n
u
n
(t) (II.5.3)
M as a un, el determinante
W(u
1
, . . . , u
n
) = Det[U(t)] =
u
1
. . . u
n
du
1
dt
. . .
du
n
dt
. . .
d
n1
u
1
dt
n1
. . .
d
n1
u
n
dt
n1
, (II.5.4)
denominado usualmente Wronskiano, es no nulo t I
0
, lo que constituye una con-
dici on m as fuerte que la independencia lineal de las funciones u
i
(t): Si n funciones
f
1
(t), . . . , f
n
(t) son linealmente dependientes, entonces W(f
1
, . . . , f
n
) = 0. Pero si
f
1
(t), . . . , f
n
(t) son linealmente independientes, W(f
1
, . . . , f
n
) puede ser tambi en nu-
lo: Si f
1
= t, f
2
= t
2
, W(f
1
, f
2
) = t
2
se anula para t = 0, a pesar de que son funciones li-
nealmente independientes para t . M as a un, las funciones f
1
(t) =
t
2
t0
0 t<0
, f
2
=
0 t0
t
2
t<0
son tambi en linealmente independientes si t , pero W(f
1
, f
2
) = 0 t. Estos pares
de funciones no pueden, pues, ser las soluciones linealmente independientes de ninguna
ecuaci on (II.5.1) de segundo orden con coecientes a(t) continuos para todo t , ya
que las soluciones u
1
(t), u
2
(t) deben cumplir adem as W(u
1
, u
2
) ,= 0 t .
Una soluci on particular u(t) de (II.5.1) queda entonces completamente determinada,
para t I
0
, por el valor inicial de u(t), es decir, por los valores iniciales de u y de sus
primeras n 1 derivadas en un punto arbitrario t
0
I
0
:
u(t
0
) = u
0
, u
(t
0
) = u
1
0
, . . . , u
(n1)
(t
0
) = u
n1
0
. (II.5.5)
Explcitamente, se verica que el sistema lineal resultante para los coecientes c
1
, . . . , c
n
en la soluci on general (II.5.3),
_
_
c
1
u
1
(t
0
) +. . . + c
n
u
n
(t
0
) = u
0
c
1
u
1
(t
0
) +. . . + c
n
u
n
(t
0
) = u
0
.
.
.
c
1
u
n1
1
(t
0
) + . . . + c
n
u
n1
n
(t
0
) = u
n1
0
62
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
posee soluci on unica u
0
, u
1
0
. . . , u
n1
0
n
y t
0
I
0
, ya que el determinante de
la matriz de coecientes de este sistema es justamente el Wronskiano (II.5.4), que es no
nulo t
0
I
0
.
Podemos observar, como anticipo, que este es un caso particular (unidimensional)
del llamado problema de Cauchy, en que una soluci on particular de una ecuaci on lineal
en derivadas parciales de orden n queda unvocamente determinada al dar el valor de la
funci on y sus n 1 derivadas normales sobre una hipersupercie de dimensi on igual a
la del espacio menos uno. En nuestro caso unidimensional, se trata de un punto, es decir,
t = t
0
.
II.5.1. Caso de coecientes constantes
Consideremos ahora el caso importante en que a
i
(t) = a
i
, constante, para i = 0, . . . , n1:
d
n
u
dt
n
+a
n1
d
n1
u
dt
n1
+. . .+a
1
du
dt
+a
0
u = 0 . (II.5.6)
La matriz A es constante y, en virtud de lo hallado en II.4.4, las soluciones del problema
homog eneo ser an del tipo u(t) = e
t
, o bien e
t
t
j
, con j entero. La ecuaci on caracterstica
para A es
Det[I A] =
n
+a
n1
n1
+. . .+a
1
+a
0
=0 , (II.5.7)
que puede obtenerse directamente planteando una soluci on puramente exponencial
u(t) = ce
t
en (II.5.6).
Si las races de (II.5.7) son todas distintas, un conjunto de soluciones linealmente
independientes es
u
1
(t) = e
1
t
, . . . , u
n
(t) = e
n
t
,
y la soluci on general es
u(t) = c
1
e
1
t
+ . . . +c
n
e
n
t
.
Las constantes c
k
pueden determinarse a partir de las n condiciones iniciales (II.5.5).
En el caso general, podemos escribir (II.5.7) en la forma
(
1
)
n
1
(
2
)
n
2
. . . (
m
)
n
m
= 0 ,
donde n
k
es la multiplicidad de la raz
k
(
m
k=1
n
k
= n). Por lo tanto, (II.5.1) puede
escribirse como
[(
d
dt
1
)
n
1
(
d
dt
2
)
n
2
. . . (
d
dt
m
)
n
m
]u = 0 , (II.5.8)
donde (
d
dt
)
j
=
d
j
dt
j
. Dado que (
d
dt
k
)e
k
t
= 0 (
d
dt
k
)(e
k
t
t
j
) = je
k
t
t
j1
y
(
d
dt
k
)
n
k
(e
k
t
t
j
) = 0, j = 0, . . . , n
k
1 .
63
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Un conjunto de n soluciones linealmente independientes de (II.5.8) es, entonces, e
k
t
t
j
, j =
0, . . . , n
k
1, k = 1, . . . , m, y la soluci on general es
u(t) =
m
k=1
e
k
t
n
k
1
j=0
c
kj
t
j
.
Las constantes c
kj
pueden determinarse, nuevamente, a partir de las condiciones iniciales
(II.5.5).
Observaci on: Si alguna raz es compleja, o sea =
r
+i
i
, y si los coecientes a
i
son todos reales,
=
r
i
i
ser a tambi en raz, ya que las races complejas aparecer an
en pares conjugados. Por lo tanto, si se desea tener una base de n soluciones reales, basta
con tomar las partes real e imaginaria de e
t
:
y
r
(t) = Re[e
t
] = e
r
t
cos(
i
t), y
i
(t) = Im[e
t
] = e
r
t
sin(
i
t) ,
ya que y
r
(t) = (e
t
+ e
t
)/2, y
i
(t) = (e
t
e
t
)/(2i), son combinaciones lineales li-
nealmente independientes de las soluciones e
t
y e
t
si
i
,= 0. Esto est a de acuerdo con
las consideraciones generales para ecuaciones diferenciales lineales mencionadas en el
primer captulo.
Notemos, tambi en, que las soluciones exponenciales asociadas con races complejas
representan soluciones oscilatorias con amplitud exponencialmente decreciente (
r
< 0)
o creciente (
r
> 0). La combinaci on lineal c
r
y
r
(t) + c
i
y
i
(t) suele, entonces, escribirse
en forma m as transparente como
c
r
e
r
t
cos(
i
t) + c
i
e
r
t
sin(
i
t) = Ae
r
t
cos(
i
t +) , (II.5.9)
donde A representa la amplitud inicial,
i
= = 2f representa una frecuencia y es
una constante de fase. Dado que cos(
i
t +) = cos
i
t cos sin
i
t sin , tenemos
A =
_
c
2
r
+ c
2
i
, tan = c
i
/c
r
.
Problema sugerido II.5.1: Hallar la soluci on general de
d
4
u
dt
4
u = 0.
Ejemplo II.5.1: Ecuaci on de Euler:
d
n
u
dr
n
+
b
n1
r
d
n1
u
dr
n1
+. . . +
b
1
r
n1
du
dr
+
b
0
r
n
u = 0 .
Aunque no se trata de una ecuaci on con coecientes constantes, podemos llevarla a la
forma (II.5.1) con a
i
constante mediante el cambio de variables r e
t
. Tenemos
du
dr
=
du
dt
dt
dr
= r
1 du
dz
,
d
2
u
dr
2
= r
2
[
d
2
u
dt
2
du
dt
], y en general,
d
m
u
dr
m
= r
m
m
i=1
im
d
i
u
dt
i
,
64
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
con
im
constante (y
mm
= 1). Por lo tanto, en la variable t se obtiene una ecuaci on del
tipo (II.5.1) con a
0
= b
0
y a
i
=
n
m=i
im
para i = 1, . . . , n 1. Las soluciones son
entonces de la forma u(r) = e
t
= r
, con determinado por la ecuaci on (II.5.7), o, en
general, e
t
t
k
= r
(ln r)
k
, y k = 1, . . . , m1, con m la multiplicidad. Los valores de
pueden tambi en hallarse directamente reemplazando en la ecuaci on de Euler una soluci on
de la forma u(r) = r
. Se dejan los detalles para el lector.
Por ejemplo, consideremos la ecuaci on
d
2
u
dr
2
+
du
dr
a
2
u = 0 .
Reemplazando u = r
se obtiene
( 1) + a
2
= 0,
cuyas races son
= a. Para a ,= 0, la soluci on general es
u(r) = c
+
r
a
+ c
r
a
y la soluci on particular para u(1) = u
1
, u
(1) = v
1
es
u(r) =
1
2
[u
1
(r
a
+ r
a
) +
v
1
a
(r
a
r
a
)] . (II.5.10)
Si a 0, la soluci on general es c
1
+ c
2
ln r y la soluci on para u(1) = u
1
, u
(1) = v
1
es
u(r) = u
1
+v
1
ln r, que puede obtenerse tomando el lmite de (II.5.10) para a 0.
Si a = i[a[, t
a
= cos([a[ ln r)+i sin([a[ ln r) y u(r) = u
1
cos([a[ ln r)+
v
1
a
sin([a[ ln r).
II.5.2. Ecuaci on diferencial lineal no homog enea de orden n
Consideremos ahora la ecuaci on
d
n
u
dt
n
+a
n1
(t)
d
n1
u
dt
n1
+. . .+a
1
(t)
du
dt
+a
0
(t)u = f(t), (II.5.11)
con valores dados de u y sus primeras n 1 derivadas en t = t
0
. La ecuaci on diferencial
puede escribirse como
du
dt
= A(t)u +f(t), f(t) =
_
_
_
_
0
. . .
0
f(t)
_
_
_
_
. (II.5.12)
A partir de la soluci on general (II.4.16), la primera la de la soluci on u(t) (que es la que
importa ya que las restantes son sus derivadas) es, entonces,
u(t) =
n
j=1
K
1j
(t, t
0
)u
j1
0
+
_
t
t
0
K
1n
(t, t
)f(t
)dt
(II.5.13)
65
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
donde K
1j
(t, t
0
) = [U(t)U
1
(t
0
)]
1j
, con U(t) una matriz fundamental de soluciones, y
u
j
0
= u
(j)
(t
0
), j = 0, . . . , n 1, son los valores en t = t
0
de u y sus primeras n 1 de-
rivadas. El primer t ermino en (II.5.13) es, pues, una soluci on de la ecuaci on homog enea
que satisface las condiciones iniciales, y el segundo, dado por la integral, es una solu-
ci on particular de la ecuaci on inhomog enea con condiciones iniciales nulas. Dado que
K(t
0
, t
0
) = I (identidad), w
k
(t) K
1k
(t, t
0
) es la soluci on de la ecuaci on homog enea
(II.5.1) que satisface
w
(j1)
k
(t
0
) =
kj
, j = 1, . . . , n
es decir, w
1
(t) es la que satisface w
1
(t
0
) = 1, con w
(j)
1
(t
0
) = 0 para j = 1, . . . , n 1,
y w
n
(t) aquella que satisface w
(j)
n
(t
0
) = 0 para j = 0, . . . , n 2, con w
(n1)
n
(t
0
) =
1. Esta ultima es la que determina (para t
0
= t
) la soluci on particular de la ecuaci on
inhomog enea
En forma m as explcita, si u
1
(t), . . . , u
n
(t) son n soluciones linealmente indepen-
dientes de la ecuaci on homog enea (columnas de U(t)), podemos tambi en reescribir la
soluci on (II.5.13) como
u(t) = (U(t)c + U(t)v(t))
1
=
n
k=1
c
k
u
k
(t) +
n
k=1
v
k
(t)u
k
(t) , (II.5.14)
donde la primera suma es la soluci on general de la ecuaci on homog enea, con c
1
, . . . , c
n
constantes arbitrarias (a ser determinadas por las n condiciones iniciales u
(k)
(t
0
) = u
k
0
,
k = 0, . . . , n 1) y la segunda, una soluci on particular de la ecuaci on no homog enea
(II.5.11). Reemplazando en (II.5.1) se obtiene U(t)v
(t) = f(t) y por lo tanto v(t) =
_
U
1
(t)f(t)dt, o, en forma explcita,
v
k
(t) =
_
(1)
k+n
W
k
(t)
W(t)
f(t)dt, k = 1, . . . , n, (II.5.15)
donde W(t) W(u
1
, . . . , u
n
) es el Wronskiano (II.5.4) y W
k
(t) el determinante de la
matriz obtenida suprimiendo la la n y la columna k de la matriz que dene a W(t). De
esta forma, podemos expresar K
1n
(t, t
) en (II.5.13) explcitamente en t erminos de las n
soluciones base u
1
(t), . . . , u
n
(t), como
K
1n
(t, t
) =
n
k=1
(1)
k+n
u
k
(t)W
k
(t
)/W(t
) . (II.5.16)
Por ejemplo, para una ecuaci on de segundo orden (n = 2), con soluciones indepen-
dientes u
1
(t), u
2
(t) de la ecuaci on homog enea, obtenemos
K
12
(t, t
) =
u
1
(t)u
2
(t
) + u
2
(t)u
1
(t
)
W(t
)
(II.5.17)
con W(t) =
u
1
(t) u
2
(t)
u
1
(t) u
2
(t)
= u
1
(t)u
2
(t) u
2
(t)u
1
(t). La soluci on general de
u
+ a
1
(t)u
+ a
0
(t)u = f(t)
66
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
ser a entonces
u(t) = c
1
u
1
(t) + c
2
u
2
(t) u
1
(t)
_
t
t
0
u
2
(t
)f(t
)
W(t
)
dt
+ u
2
(t)
_
t
t
0
u
1
(t
)f(t
)
W(t
)
dt
. (II.5.18)
Problema sugerido II.5.2: Probar (II.5.17)(II.5.18).
II.5.3. Ecuaci on de orden n no homog enea con coecientes constan-
tes
En el caso de coecientes constantes (a
i
(t) = a
i
t), K(t, t
0
) = exp[A(t t
0
)] =
K(t t
0
) y podemos entonces reescribir (II.5.13) como
u(t) =
n
j=1
K
1j
(t t
0
)u
j
0
+
_
t
t
0
K
1n
(t t
)f(t
)dt
(II.5.19)
con w
k
(t) = K
1k
(t) las soluciones de la ecuaci on homog enea que satisfacen w
(j1)
k
(0) =
kj
, j = 1, . . . , n.
Explcitamente, en el caso de n races
k
distintas, las n soluciones linealmente inde-
pendientes son u
k
(t) = e
k
t
, k = 1, . . . , n, y el Wronskiano es
W(u
1
, . . . , u
n
) = e
(
1
+...+
n
)t
i<j
(
j
i
) . (II.5.20)
La ecuaci on (II.5.16) conduce, entonces, a
K
1n
(t, t
) = K
1n
(t t
) =
k
e
k
(tt
)
P
(
k
)
, (II.5.21)
donde
P() =
n
i=1
(
i
)
es el polinomio caracterstico y P
(
k
) =
i=k
(
k
i
).
Por ejemplo, para una ecuaci on de segundo orden (n = 2) obtenemos, si
1
,=
2
,
K
12
(t t
) =
e
1
(tt
)
e
2
(tt
2
. (II.5.22)
Problema sugerido II.5.3: Probar los resultados (II.5.20), (II.5.21), (II.5.22).
Problema sugerido II.5.4: En base a los resultados anteriores, probar que la soluci on de
la ecuaci on de segundo orden
d
2
u
dt
2
+ 2a
du
dt
+bu = f(t)
67
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
que satisface u(0) = u
0
, u
(0) = v
0
, es
u(t) = e
at
[u
0
cosh(rt) +
v
0
+ au
0
r
sinh(rt)]
+
_
t
0
e
a(tt
)
sinh[r(t t
)]
r
f(t
)dt
, (II.5.23)
con r =
a
2
b. Si r 0, la fracci on en (II.5.23) se reduce a t t
(y si r = i, a
sin[(t t
)]/).
68
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
II.5.4. Ecuaci on diferencial lineal de segundo orden
Dado que las ecuaciones diferenciales lineales de segundo orden aparecen asociadas
a problemas de Fsica con mucha frecuencia, resulta conveniente dedicarles esta subsec-
ci on. Parte de su contenido servir a tambi en para ilustrar lo discutido en la subsecci on
anterior para el caso de orden n. Empecemos considerando la ecuaci on homog enea
d
2
u
dt
2
+a(t)
du
dt
+b(t)u = 0. (II.5.24)
Si a(t) y b(t) son funciones continuas en un cierto intervalo I = [t
1
, t
2
], entonces la
ecuaci on posee siempre dos soluciones linealmente independientes u
1
(t) y u
2
(t), para
t I, tales que la soluci on general de la ecuaci on es de la forma
u(t) = c
1
u
1
(t) + c
2
u
2
(t), (II.5.25)
con c
1
y c
2
dos constantes arbitrarias. Estas dos constantes se pueden determinar cono-
ciendo las condiciones iniciales u(t
0
) = u
0
y u
(t
0
) = u
0
, donde t
0
I. Para a(t) y b(t)
continuas en I vale el teorema de unicidad de la soluci on; por lo tanto, la soluci on u(t)
que satisface las condiciones iniciales es unica. En otras palabras, el sistema algebraico
de dos ecuaciones lineales
c
1
u
1
(t
0
) + c
2
u
2
(t
0
) = u
0
c
1
u
1
(t
0
) + c
2
u
2
(t
0
) = u
0
(II.5.26)
posee siempre una unica soluci on para las constantes c
1
y c
2
. Esto, a su vez, implica
que el wronskiano debe ser no nulo para t = t
0
. Pero, como t
0
es un punto cualquiera
del intervalo, la unicidad implica que si u
1
(t) y u
2
(t) son dos soluciones linealmente
independientes de la ecuaci on homog enea; entonces, el wronskiano W(u
1
, u
2
) ,= 0 t
I. Por otro lado, como ya se enfatiz o en el caso general, W(v
1
, v
2
) puede anularse en un
cierto punto, aun cuando v
1
(t) y v
2
(t) sean funciones independientes, pero en ese caso no
ser an soluciones de la ecuaci on diferencial lineal homog enea de segundo orden.
En este punto parece oportuno mencionar que no existe un m etodo general simple y
directo para hallar las dos soluciones linealmente independientes de la ecuaci on diferen-
cial lineal homog enea de segundo orden, cuando las funciones a(t) y b(t) son funciones
generales, no constantes. Sin embargo, si a(t) y b(t) se pueden desarrollar en series de
potencias alrededor de alg un punto t
0
, entonces es posible proponer un desarrollo similar
para la soluci on: u(t) =
j=0
a
j
(t t
0
)
j
. Reemplazando esta serie en la ecuaci on se pue-
de obtener una relaci on recursiva para los coecientes a
j
. Esta metodologa se tratar a en
detalle m as adelante, en el contexto del problema de Sturm-Liouville (III.1).
Por otro lado, s existe un m etodo general simple para encontrar la segunda soluci on
linealmente independiente u
2
(t), si se conoce una soluci on no nula u
1
(t).
69
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
II.5.5. M etodo general para hallar la segunda soluci on de una ecua-
ci on lineal homog enea de segundo orden
Supongamos que se conoce una soluci on u
1
(t) de la ecuaci on lineal
u
+ a(t)u
+ b(t)u = 0. (II.5.27)
La otra soluci on linealmente independiente puede hallarse proponiendo una soluci on del
tipo
u
2
(t) = v(t)u
1
(t)
En efecto, reemplazando esta expresi on en (II.5.27) obtenemos para v la ecuaci on
u
1
(t)v
+ (2u
1
(t) +a(t)u
1
(t))v
= 0,
que es una ecuaci on lineal de primer orden en v
. Su soluci on es v
(t) = cu
2
1
(t)e
a(t)dt
,
de donde
v(t) = c
_
dt
e
a(t)dt
(u
1
(t))
2
. (II.5.28)
Entonces, teniendo ahora la segunda soluci on particular u
2
(t) = v(t)u
1
(t) (linealmente
independiente de u
1
(t) pues v(t) no puede ser constante), tambi en tenemos la soluci on
general de la ecuaci on homog enea, dada por la combinaci on lineal c
1
u
1
(t) +c
2
u
2
(t), de
acuerdo a lo discutido m as arriba.
Aunque este no resulta siempre el m etodo m as c omodo, puede aplicarse para cual-
quier a(t). N otese que v(t) no depende explcitamente de b(t). El m etodo puede utilizarse
tambi en para determinar el comportamiento de la segunda soluci on en la vecindad de
puntos singulares.
Como ejemplo simple, consideremos la ecuaci on u
k
2
u = 0, cuyas soluciones son
u(t) = c
e
kt
. Si u
1
(t) = e
kt
v(t) e
2kt
, de donde u
2
(t) e
kt
. Si tomamos
u
1
(t) = cosh(kt) v(t) tanh(kt), de donde u
2
(t) = sinh(t).
Como segundo ejemplo, consideremos la ecuaci on u
+ 2u
+ u = 0. Su ecuaci on
caracterstica posee una unica raz = 1, que origina la soluci on u
1
(t) = e
t
. La
segunda soluci on puede obtenerse con este m etodo: Tenemos v(t)
_
e
2t
e
2t
dt = t, de
donde u
2
(t) te
t
.
II.5.6. Ecuaci on lineal homog enea de segundo orden con coecientes
constantes
Consideremos el caso en que los coecientes son constantes,
d
2
u
dt
2
+ 2a
du
dt
+ bu = 0. (II.5.29)
70
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Para a = /(2m) > 0, b = k/m > 0, esta ecuaci on determina la posici on u(t) de una
partcula de masa munida a un resorte de constante k > 0 en un medio viscoso con fuerza
de rozamiento proporcional a la velocidad (m
d
2
u
dt
2
= ku
du
dt
).
Las races de la ecuaci on caracterstica
2
+ 2a + b = 0 son
= a r, r =
a
2
b .
Si r ,= 0, la soluci on general es, entonces,
u(t) = c
+
e
+
t
+ c
t
(II.5.30)
y la soluci on para u(0) = u
0
, u
(0) = v
0
es
u(t) = e
at
[u
0
cosh(rt) +
v
0
+ au
0
r
sinh(rt)] . (II.5.31)
Si r = 0 (a
2
= b) la soluci on general es
u(t) = c
1
e
at
+c
2
e
at
t (II.5.32)
y la soluci on que satisface u(0) = u
0
, u
(0) = v
0
es
u(t) = e
at
[u
0
+ (v
0
+ au
0
)t] , (II.5.33)
que puede obtenerse de (II.5.31) tomando el lmite r 0.
Si a
2
> b, r es real y por lo tanto
son reales. En el caso de la partcula, esto
corresponde a >
4mk, es decir, a amortiguamiento fuerte. Las ecuaciones (II.5.30) o
(II.5.31) describen, en este caso, un decrecimiento exponencial de u(t), ya que
< 0
(r < a). El sistema no realiza oscilaciones. El caso lmite a
2
= b corresponde a =
4mk, donde tampoco se producen oscilaciones.
Si a
2
< b, r =i, con =
b a
2
real y cosh(rt)=cos(t), sinh(t)=i sin(t) en
(II.5.31), por lo que
u(t) = e
at
[u
0
cos(t) +
v
0
+ au
0
sin(t)] . (II.5.34)
En el caso de la partcula, esto corresponde a <
4mk, es decir, a amortiguamiento
d ebil. Las ecuaciones (II.5.31) o (II.5.34) representan en este caso un movimiento osci-
latorio amortiguado, con frecuencia angular =
_
k
m
_
1
2
4mk
y una amplitud que
disminuye exponencialmente, proporcional a e
t/(2m)
.
Por supuesto, si = 0 (a = 0), obtenemos la soluci on para el oscilador arm onico
simple,
u(t) = u
0
cos(t) +
v
0
sin(t) ,
con =
_
k/m.
71
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
0
T 2T 3T 4T
t
A
A
u(t)
0
T 2T 3T 4T
t
A
A
u(t)
c
f10
T 2T 3T 4T
t
A
A
u(t)
c
f10
T 2T 3T 4T
t
A
A
u(t)
c
T 2T 3T 4T
t
A
A
u(t)
c
T 2T 3T 4T
t
A
A
u(t)
2
c
T 2T 3T 4T
t
A
A
u(t)
2
c
T 2T 3T 4T
t
A
A
u(t)
u(0) = A, u
(0) = 0 u(0) = 0, u
(0) = A
Figura 12: Movimiento oscilatorio arm onico y amortiguado: Gr acas de la soluci on
u(t), ecs. (II.5.31)(II.5.34), para a = /(2m) > 0, b = k/m > 0. La columna izquierda
corresponde a condiciones iniciales u(0) = A, u
(0) = 0 (velocidad inicial nula, partiendo
de la posici on A) y la derecha a u(0) = 0, u
(0) = A (velocidad inicial ja, partiendo
del punto de equilibrio). La primera la representa el movimiento oscilatorio arm onico
( = 0), la segunda el movimiento subamortiguado (0 < <
c
, con
c
=
4mk), la
tercera el caso crtico ( =
c
) y la cuarta el movimiento sobreamortiguado ( >
c
). En
todos los casos, T = 2
_
m/k es el perodo del movimiento oscilatorio en ausencia de
roce.
72
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
II.5.7. Ecuaci on lineal no homog enea de segundo orden. M etodo ge-
neral y m etodo de coecientes indeterminados
Estudiemos ahora la ecuaci on
d
2
u
dt
2
+ a(t)
du
dt
+ b(t)u = f(t). (II.5.35)
Como sabemos, su soluci on general es de la forma
u(t) = u
h
(t) + u
p
(t)
donde u
h
(t) = c
1
u
1
(t) +c
2
u
2
(t) es la soluci on general de la ecuaci on homog enea y u
p
(t)
es una soluci on particular de la ecuaci on inhomog enea.
Utilizando el m etodo general (II.5.18), dadas dos soluciones independientes u
1
(t),
u
2
(t) de la ecuaci on homog enea, sabemos que podemos obtener u
p
(t) como
u
p
(t) = u
1
(t)
_
t
t
0
u
2
(t
)f(t
)
W(t
)
dt
+ u
2
(t)
_
t
t
0
u
1
(t
)f(t
)
W(t
)
dt
=
_
t
t
0
k(t, t
)f(t
)dt
, k(t, t
) =
u
1
(t)u
2
(t
) + u
1
(t)u
2
(t
)
W(t
)
,
con W(t) = u
1
(t)u
2
(t) u
1
(t)u
2
(t).
En el caso de una ecuaci on con coecientes constantes,
d
2
u
dt
2
+ a
du
dt
+ bu = f(t) , (II.5.36)
si las races de la ecuaci on caracterstica son distintas, tenemos u
1
(t) = e
1
t
, u
2
(t) = e
2
t
y entonces
u
p
(t) = e
1
t
_
t
t
0
e
1
t
f(t
2
dt
2
t
_
t
t
0
e
2
t
f(t
2
dt
(II.5.37)
=
_
t
t
0
k(t t
)f(t
)dt
, (II.5.38)
siendo
k(t) =
e
1
t
e
2
t
2
(II.5.39)
la soluci on de la ecuaci on homog enea que satisface k(0) = 0, k
(0) = 1.
Problema sugerido II.5.5: Extender las expresiones anteriores al caso
1
=
2
.
73
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
M etodo de coecientes indeterminados.
Es interesante destacar que, para ciertas formas particulares de f(t) y bajo ciertas condi-
ciones (que implican que f(t) no sea soluci on de la ecuaci on homog enea), u
p
(t) puede
determinarse ensayando una soluci on similar a f(t). En general esta t ecnica es aplicable
cuando f(t) es una funci on exponencial (real o compleja), un polinomio de grado s, un
producto de exponencial por polinomio o una suma de funciones de este tipo. En todos
estos casos la derivada de f(t) es una funci on del mismo tipo y esto justica el presente
m etodo. Si, en cambio, f(t) es soluci on de la ecuaci on homog enea, debe ensayarse una
soluci on de la forma tf(t) si tf(t) no es soluci on de la homog enea, y t
2
f(t) s lo es.
Ilustramos el m etodo mediante los siguientes ejemplos.
Ejemplo II.5.2: f(t) = f
0
e
t
, con f
0
constante.
Proponemos la soluci on u
p
(t) = Be
t
. Reemplazando en (II.5.36) obtenemos
Be
t
(
2
+ a + b) = Ae
t
. (II.5.40)
Si e
t
no es soluci on de la ecuaci on homog enea, entonces no es raz de la ecuaci on
caracterstica, y B queda determinado por
B =
A
2
+a + b
. (II.5.41)
Si, en cambio, e
t
es soluci on de la ecuaci on homog enea, se modica la propuesta,
planteando u
p
(t) = Bt e
t
. Si t e
t
tambi en es soluci on de la homog enea se propone
u
p
(t) = Bt
2
e
t
.
Problema sugerido II.5.6: Hallar una soluci on particular de (II.5.36) para f(t) = Acos(t)+
Bsin(t). Ayuda: Escribir las funciones trigonom etricas en t erminos de exponenciales
complejas, y proceder siguiendo el Ejemplo II.5.2, suponiendo que a y b son reales, y
tomando la parte real de u
p
(t) al nal del c alculo. Considerar los casos: i) i no es raz
de la ecuaci on caracterstica y ii) i s es raz. La soluci on particular ser a de la forma
C cos(t +) en i) y Ct cos(t + ) en ii).
Ejemplo II.5.3: f(t) es un polinomio de grado m. En este caso, si = 0 no es raz de
la ecuaci on caracterstica, se propone para u
p
(t) un polinomio completo del mismo grado
m, con coecientes a determinar. Por ejemplo, para la ecuaci on
d
2
u
dt
2
+
du
dt
4u = 4t
2
5
2
, (II.5.42)
proponemos u
p
(t) = At
2
+ Bt + C. Sustituyendo en la ecuaci on se encuentran tres
ecuaciones algebraicas, 4A = 4, 2A 4B = 0 y 2A + B 4C = 5/2, que permiten
obtener los coecientes. La soluci on es u
p
(t) = t
2
t
2
. Si, en cambio, = 0 es raz de
la ecuaci on caracterstica, se debe proponer, para u
p
(t), un polinomio de grado m + 1.
74
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Problema sugerido II.5.7: Hallar la soluci on general de la ecuaci on y
+ y
= at + b.
Comparar los resultados obtenidos con el m etodo general (II.5.37) y el de coecientes
indeterminados.
Problema sugerido II.5.8 Discutir el m etodo de coecientes indeterminados para siste-
mas de primer orden de n n: du/dt = Au +f(t).
i) Muestre que si f(t) = f
0
e
t
y no es autovalor de A, puede proponerse una soluci on
particular u
p
(t) = ve
t
. Discuta tambi en el caso en que es autovalor de A.
ii) Muestre que si A es no singular y f(t) = f
0
+. . . +f
m
t
m
es un polinomio (vectorial)
de grado m, puede proponerse un polinomio del mismo grado u
p
(t) = u
0
+. . . +u
m
t
m
.
Problema guiado II.5.9: El oscilador arm onico forzado. Resonancia.
M
F(t)
Considerar la aplicaci on de una fuerza externa F(t) a una masa m
unida a un resorte de constante k > 0.
a) Mostrar que la ecuaci on que describe el movimiento, midiendo la
elongaci on y(t) a partir de la posici on de equilibrio, es
y
+
2
y = f(t), f(t) = F(t)/m, w =
_
k/m
b) Dar una expresi on de la soluci on general para una fuerza arbitraria.
c) Considerar ahora una fuerza externa de la forma
F(t) = F cos(
ex
t)
tal que la ecuaci on de movimiento es
y
+
2
y = f cos(
e
t).
Mostrar que, si
e
,= , la soluci on general es
y(t) = c
1
cos(t) + c
2
sen (t) +
f
2
e
cos(
e
t) (
e
,= ),
y la soluci on que satisface y(0) = 0, y
(0) = 0 es
y(t) =
f
2
e
[cos(
e
t) cos(t)] (
e
,= ). (II.5.43)
Gracar esta soluci on y discutir su comportamiento al acercarse
e
a . Mostrar que
puede escribirse como
y(t) =
2f
2
e
sen (
1
t) sen (
2
t)
75
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
con
1
= ( +
e
)/2,
2
= (
e
)/2.
d) Mostrar que, si
e
= (resonancia), la soluci on general es
y(t) = c
1
cos(t) + c
2
sen (t) +
f
2
t sen (t) (
e
= ) (II.5.44)
y la soluci on que satisface y(0) = y
(0) = 0 es
y(t) =
f
2
t sen (t) (
e
= ). (II.5.45)
Gracar e interpretar esta soluci on, y discutir el fen omeno de resonancia.
e) Mostrar que el lmite de la soluci on (II.5.43) para
e
(y t jo) es la soluci on
(II.5.44).
e
0.2
10 T 20 T
t
10 A
10 A
y(t)
e
0.5
10 T 20 T
t
10 A
10 A
y(t)
e
0.8
10 T 20 T
t
10 A
10 A
y(t)
e
0.9
10 T 20 T
t
10 A
10 A
y(t)
e
0.95
10 T 20 T
t
10 A
10 A
y(t)
10 T 20 T
t
50 A
10 A
10 A
50 A
y(t)
Figura 13: Gr acos de la soluci on (II.5.43) para distinas frecuencias externas
e
e inten-
sidad f ja. N otese el cambio de escala en el caso resonante
e
= . T = 2/ es el
perodo y A = f/
2
.
76
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
.
Problema guiado II.5.10: Oscilador forzado amortiguado.
M
F(t)
Examinemos ahora el sistema anterior en presencia
de una fuerza de roce viscosa F
r
= y
.
a) Mostrar que la ecuaci on que describe el movimiento
en presencia de una fuerza externa F(t) es
y
+ 2y
+
2
y = f(t)
donde f(t) = F(t)/m y = /(2m) > 0.
b) Mostrar que, para
f(t) = f cos(
e
t) ,
una soluci on particular es
y
p
(t) = f
(
2
2
e
) cos(
e
t) + 2
e
sen (
e
t)
(
2
2
e
)
2
+ 4
2
2
e
=
f
_
(
2
2
e
)
2
+ 4
2
2
e
cos(
e
t +) (II.5.46)
Dado que la soluci on general de la ecuaci on homog enea disminuye ahora exponencial-
mente al aumentar t, para tiempos grandes (mayores que el tiempo de relajaci on) s olo
subsiste la soluci on particular (II.5.46). Si =
e
, la amplitud de la oscilaci on resultante
crece inicialmente pero se estabiliza r apidamente en el valor dado por la soluci on parti-
cular. Es importante destacar que el sistema termina oscilando con la frecuencia externa
y no la frecuencia propia.
77
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
e
0.2
10 T 20 T
t
10 A
10 A
y(t)
e
0.5
10 T 20 T
t
10 A
10 A
y(t)
e
0.9
10 T 20 T
t
10 A
10 A
y(t)
e
0.95
10 T 20 T
t
10 A
10 A
y(t)
10 T 20 T
t
10 A
10 A
y(t)
f20
1 2
e
f 0
5 A
10 A
A(
e
)
Figura 14: Gr acos de la soluci on en presencia de roce viscoso con = /20 para
y(0) = y
(0) = 0. La ultima gura (II.5.43) muestra la amplitud de la soluci on particular
en funci on de la frecuencia externa para = /20, /10 y /5. Es m axima para
ex
.
Problema guiado II.5.11: Sistemas lineales de segundo orden.
Consideremos el sistema de segundo orden homog eneo asociado a una matriz A de nn,
u
= Au, (II.5.47)
donde u = (u
1
, . . . , u
n
)
t
. Esta ecuaci on surge, por ejemplo, al aplicar la 2
a
ley de Newton
a sistemas descriptos por fuerzas que dependen linealmente de la posici on, tales como
masas unidas por resortes y sistemas ligeramente apartados de su punto de equilibrio. El
sistema (II.5.47) es equivalente al sistema de 2n ecuaciones de primer orden
_
u
= w
w
= Au
donde w = u
. Es posible, no obstante, resolver (II.5.47) en forma directa.
a) Si A es independiente de t, proponiendo una soluci on u(t) = e
t
v y reemplazando
78
II.5 ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
directamente en (II.5.47), muestre que se obtiene la ecuaci on Av =
2
v, lo que implica
que el sistema (II.5.47) posee soluciones de la forma
u
+
(t) = e
t
v, u
(t) = e
t
v
donde es un autovalor de A y v un autovector asociado.
b) Si Aes diagonalizable, tal que Av
i
=
i
v
i
, i = 1, . . . , n, con v
1
, . . . , v
n
linealmente
independientes, muestre que un conjunto completo de soluciones de (II.5.47) es
u
+
i
(t) = e
i
t
v
i
, u
i
(t) = e
i
t
v
i
si
i
,= 0, y
u
+
i
(t) = u
i
, u
i
(t) = tu
i
si
i
= 0, para i = 1, . . . , n. Escriba la soluci on general. Pruebe tambi en que estas
soluciones proveen 2n soluciones linealmente independientes del sistema asociado de
primer orden, y que este ultimo es no diagonalizable cuando A tiene un autovalor nulo.
c) Muestre que si A es real y
i
< 0, las soluciones reales linealmente independientes
asociadas a
i
son
u
c
i
(t) = cos(
i
t) v
i
, u
s
i
= sen (
i
t) v
i
,
i
=
_
i
> 0
con c
i1
u
c
i
(t) + c
i2
u
s
i
(t) = a
i
v
i
cos(
i
t +
i
).
Problema sugerido II.5.12: Utilizando el m etodo anterior, resuelva el problema de dos
masas iguales (m) unidas cada una a una pared por un resorte de constate k
1
y unidas
entre s por un resorte de constante k
2
.
m m
k
1
k
1
k
2
Muestre que las frecuencias de oscilaci on del
sistema (asumiendo k
1
> 0, k
2
> 0, m > 0) son
1
=
_
k
1
+ 2k
2
m
,
2
=
_
k
1
m
.
Encuentre la soluci on general y discuta los modos normales de vibraci on.
Problema sugerido II.5.13: Resuelva el problema anterior, pero considerando que la se-
gunda masa no est a unida a la pared.
Problema sugerido II.5.14: D e una expresi on para la soluci on general del sistema no
homog eneo u
= Au +f(t), suponiendo que A es diagonalizable.
79
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
II.6. Introducci on a la Teora de Distribuciones. Funci on
de Green causal.
II.6.1. La Delta de Dirac como lmite de una secuencia
Consideremos la ecuaci on diferencial lineal inhomog enea
d
2
u
dt
2
au = f(t). Desde
un punto de vista intuitivo, parecera razonable representar la inhomogeneidad f(t) como
una suma de t erminos impulsivos concentrados en intervalos de tiempo muy peque nos, y
obtener luego la soluci on como suma de las soluciones particulares para cada uno de estos
t erminos. La formalizaci on de esta idea requiere el concepto de distribuci on o funci on
generalizada, que discutiremos a continuaci on.
Consideremos la funci on
g
(x) =
_
1/ [x[ /2
0 [x[ > /2
> 0. (II.6.1)
La misma satisface
_
(x)dx = 1 > 0. Adem as, si f es una funci on continua
arbitraria,
_
(x)f(x)dx =
1
_
/2
/2
f(x)dx =
F(/2) F(/2)
donde F es una primitiva de f. Para 0
+
, g
(x) estar a concentrada cerca del origen y
obtenemos
lm
0
+
_
(x)f(x)dx = lm
0
+
F(/2) F(/2)
= F
(0) = f(0). (II.6.2)
Podemos entonces denir la distribuci on o funci on generalizada (x) (delta de Dirac)
como el lmite
(x) = lm
0
+
g
(x), (II.6.3)
que satisface
_
(x)f(x)dx = f(0). (II.6.4)
Si bien el lmite (II.6.3) no existe estrictamente (es 0 si x ,= 0 y es si x = 0), el lmite
de la integral (II.6.2) f continua en un entorno de x = 0, y eso es lo que simbolizan
las ecuaciones (II.6.3)(II.6.4). Puede obtenerse una buena aproximaci on a (x) mediante
(II.6.3) tomando mucho menor que la longitud en la cual f vara apreciablemente. Fsi-
camente, (x) puede interpretarse como la densidad lineal de masa correspondiente a una
masa puntual de magnitud 1 localizada en el origen.
Notemos tambi en que, si ab ,= 0 y a < b,
_
b
a
(x)f(x)dx = lm
0
+
_
b
a
g
(x)f(x)dx =
_
f(0) a < 0 < b
0
a<b<0 o
0<a<b
.
80
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
Consideraremos, en lo sucesivo, funciones de prueba f, que son funciones acotadas
y derivables a cualquier orden, y que se anulan fuera de un intervalo nito I (recor-
demos ante todo que tales funciones existen: si f(x) = 0 para x 0 y x 1, y
f(x) = e
1/x
2
e
1/(1x)
2
para [x[ < 1, f es derivable a todo orden en x = 0 y x = 1).
Actuando sobre el espacio de funciones de prueba existen muchas otras funciones g
(x)
que convergen a (x), que pueden ser derivables a cualquier orden. Un conocido ejemplo
es
(x) = lm
0
+
e
x
2
/2
2
2
. (II.6.5)
En efecto,
1
2
_
e
x
2
/2
2
dx = 1 > 0 y, como se ver a m as abajo,
lm
0
+
1
2
_
e
x
2
/2
2
f(x)dx = f(0). (II.6.6)
La gr aca de g
(x) =
1
2
e
x
2
/2
2
es la campana de Gauss, con area 1 y dispersi on
_
(x)x
2
dx =
2
. Para 0
+
, g
(x) se concentra alrededor de x = 0, pero mantiene
su area constante.
En general, si g
(x) est a denida x y > 0, diremos que
lm
0
+
g
(x) = (x) sii lm
0
+
_
(x)f(x)dx = f(0)
funci on de prueba f.
Por ejemplo, si g(x) 0 x y
_
g(x)dx = 1
lm
0
+
1
g(x/) = (x).
En efecto, si > 0,
1
_
g(x/)dx =
_
g(u)du = 1 y lm
0
+
1
_
b
a
g(x/)dx =
lm
0
+
_
b/
a/
g(u)du =
1 a<0<b
0 a<b<0 o 0<a<b
.
Por lo tanto, si [f(x)[ M x y ab > 0,
lm
0
+
1
[
_
b
a
g(x/)f(x)dx[ M lm
0
+
1
_
b
a
g(x/)dx = 0. De este modo, si t > 0
y f es continua y acotada,
I
f
lm
0
+
1
_
g(x/)f(x)dx = lm
0
+
1
_
t
t
g(x/)f(x)dx.
Si m
t
f(x) M
t
para x [t, t] m
t
I
f
M
t
t > 0, pero por continuidad
de f, lm
t0
+
M
t
= lm
t0
+
m
t
= f(0), por lo que I
f
= f(0).
Ejemplos muy utilizados son (II.6.5) y, tambi en,
(x) =
1
lm
0+
Im[
1
x + i
] =
1
lm
0
+
x
2
+
2
, (II.6.7)
81
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
1.0 0.5 0.0 0.5 1.0
x
5
10
15
20
g
(x)H[f2x]f
1.5 1.0 0.5 0.0 0.5 1.0 1.5
x
2
4
6
8
(2
2
)
1f2
e
x
2
|2
2
]
1.5 1.0 0.5 0.0 0.5 1.0 1.5
x
1
2
3
4
5
6
(f)f(x
2
2
)
1.5 1.0 0.5 0.0 0.5 1.0 1.5
x
1
2
3
4
5
6
(fx
2
)sin
2
xf
1.5 1.0 0.5 0.5 1.0 1.5
x
2
2
4
6
(x)
1
sin xf
Figura 15: Gr aco de las funciones g
(x) denidas en (II.6.1), (II.6.5), (II.6.7), (II.6.8) y
(II.6.9), para = 0,2, 0,1 y 0,05.
(x) =
1
lm
0
+
sin
2
(x/)
x
2
, (II.6.8)
que corresponden a g(x) =
1
(1+x
2
)
y g(x) =
sin
2
(x)
x
2
. No obstante, existen tambi en fun-
ciones g(x) no siempre positivas que satisfacen lm
0
+
1
g(x/) = (x). Por ejemplo la
f ormula de Dirichlet,
lm
0
+
1
f(x)
sin(x/)
x
dx = f(0),
corresponde a g(x) = sin(x)/(x) e implica
lm
0
+
sin(x/)
x
= (x) (II.6.9)
aun cuando lm
0
+
sin(x/)/x es no nulo (no existe) para x ,= 0 (s olo es nulo el promedio:
lm
0
+
1
t
_
x
0
+t
x
0
t
g(x/)dx = 0 si 0 < t < [x
0
[).
II.6.2. Propiedades b asicas de la delta de Dirac
La composici on de (x) con otras funciones se dene de modo tal que se sigan cum-
pliendo las reglas usuales de integraci on. Por ejemplo,
_
(x x
0
)f(x)dx =
_
(u)f(u + x
0
)du = f(x
0
). (II.6.10)
82
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
Asimismo, si a ,= 0,
_
(ax)f(x)dx =
1
[a[
_
(u)f(
u
a
)du =
1
[a[
f(0),
por lo que
(ax) =
1
[a[
(x) , a ,= 0. (II.6.11)
En particular, (x) = (x).
Para una funci on invertible y derivable g(x) que posee una sola raz x
1
(g(x
1
) = 0),
con g
(x
1
) ,= 0, obtenemos
_
(g(x))f(x)dx =
_
r
+
r
(u)
f(g
1
(u))
[g
(g
1
(u))[
du =
f(x
1
)
[g
(x
1
)[
,
donde (r
, r
+
) en la imagen g(), con r
>
<
0 y g
1
(0) = x
1
. Por lo tanto, en este caso,
(g(x)) =
(x x
1
)
[g
(x
1
)[
. (II.6.12)
En general, para una funci on g(x) derivable con races aisladas x
n
y g
(x
n
) ,= 0 tenemos
(g(x)) =
n
(x x
n
)
[g
(x
n
)[
. (II.6.13)
Sin embargo, (x
2
) y en general, (x
n
), n > 1, no est an denidas para funciones de
prueba arbitrarias. Tampoco lo est a el producto (x)(x) = [(x)]
2
. Notemos tambi en
que, si g(x) es una funci on de prueba,
g(x)(x) = g(0)(x). (II.6.14)
Derivadas de (x).
Si queremos que se siga cumpliendo la integraci on por partes, podemos denir tam-
bi en la derivada
(x) tal que (recordar que f se anula fuera de un intervalo nito)
_
(x)f(x)dx =
_
(x)f
(x)dx = f
(0)
y, en general, la derivada en esima
(n)
(x) tal que
_
(n)
(x)f(x)dx = (1)
n
f
(n)
(0).
De este modo,
f
(x
0
) =
_
(x x
0
)f(x)dx, (II.6.15)
f
(n)
(x
0
) = (1)
n
_
(n)
(x x
0
)f(x)dx. (II.6.16)
83
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
Notemos tambi en que, si a ,= 0,
(n)
(ax) =
1
a
n
[a[
(n)
(x).
En particular,
(n)
(x) = (1)
n
(n)
(x).
Problema sugerido II.6.1: Dada una funci on g(x) derivable, probar las siguientes igual-
dades:
a) g(x)
(x) = g(0)
(x) g
(0)(x),
b) [(x)g(x)]
(x)g(x) + (x)g
(x) = g(0)
(x),
c) [(g(x))]
(g(x))g
(x).
Problema sugerido II.6.2: La delta de Dirac en n dimensiones se dene a trav es de
_
(r r
0
)f(r)d
n
x = f(r
0
) ,
donde r = (x
1
, . . . , x
n
), dx
n
= dx
1
. . . dx
n
y la integral es sobre todo R
n
. Esto implica
que (r) = (x
1
)(x
2
) . . . (x
n
) .
i) Mostrar que si ad bc = 0, (ax + by)(cx + dy) =
1
|adbc|
(x)(y).
ii) Mostrar que si u
1
(x, y), u
2
(x, y) son diferenciables y se anulan s olo en x = y = 0, con
J =
(u
1
,u
2
)
(x,y)
[
x=y=0
,= 0, entonces (u
1
(x, y))(u
2
(x, y)) = [J[
1
(x)(y).
II.6.3. Funci on de Heaviside
Consideremos la funci on escal on
H(x) =
_
1 x 0
0 x < 0
(II.6.17)
Mostraremos que, en el sentido de las distribuciones, H
(x) = (x) (lo que es intuitiva-
mente razonable) de modo que H(x) representa la primitiva de (x), al menos en forma
simb olica. En efecto, para una funci on de prueba f(x), obtenemos, integrando por partes,
_
(x)f(x)dx =
_
H(x)f
(x)dx =
_
0
f
(x)dx = f(0),
de modo que
H
(x) = (x).
Mediante H(x) podemos escribir una integral en un intervalo nito como una integral en
toda la recta, donde los lmites quedan determinados por el integrando:
_
b
f(x)dx =
_
H(b x)f(x)dx,
_
b
a
f(x)dx =
_
[H(b x) H(a x)]f(x)dx.
84
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
II.6.4. Tratamiento formal. Teora de distribuciones
Consideremos primero un espacio V de vectores de dimensi on nita, tal como R
n
.
Podemos denir una forma o funcional lineal como una funci on L : V que asigna a
cada vector u V un n umero real L(u) y que satisface
L(c
1
u
1
+ c
2
u
2
) = c
1
L(u
1
) + c
2
L(u
2
). (II.6.18)
Puede mostrarse que un unico vector l tal que
L(u) = (l, u) (II.6.19)
u V , donde (l, u) denota el producto interno de dos vectores ((u, u) 0, con
(u, u) = 0 s olo si u = 0, (v, u) = (u, v)
, (c
1
v
1
+ c
2
v
2
, u) = c
1
(v
1
, u) + c
2
(v
2
, u)).
Por ejemplo, en R
n
, podemos considerar (v, u) = v u (producto escalar usual) y, en C
n
,
(v, u) = v
u.
Desarrollando u en una base ortonormal de vectores v
i
, i = 1, . . . , n, tales que
(v
i
, v
j
) =
ij
, tenemos u =
n
i=1
c
i
v
i
y
L(u) =
i
c
i
L(v
i
) =
i
c
i
l
i
= (l, u),
donde l
i
= L(v
i
) y l =
i
l
i
v
i
. De modo que toda forma lineal L en un espacio vec-
torial de dimensi on nita con producto interno puede ser identicada con un vector l del
espacio.
En espacios de dimensi on innita, tal identicaci on no es siempre posible. Conside-
remos, por ejemplo, el espacio de funciones de prueba D formado por funciones reales
f(x) que poseen derivadas de cualquier orden y se anulan fuera de un intervalo nito.
Podemos denir el producto interno
(g, f) =
_
g(x)f(x)dx. (II.6.20)
Consideremos ahora la funcional lineal L que asigna a cada funci on un n umero real, con
L[c
2
f
1
+ c
2
f
2
] = c
1
L[f
1
] + c
2
L[f
2
],
donde c
1
y c
2
son constantes. Para toda funci on g(x) D podemos asociar la funcional
lineal L
g
(forma lineal), tal que
L
g
[f] =
_
g(x)f(x)dx. (II.6.21)
Pero podemos tambi en denir la funcional tal que
[f] = f(0), (II.6.22)
85
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
aunque es obvio que no existe g D que satisfaga
_
g(x)f(x)dx = f(0) (II.6.23)
f D. El espacio de funcionales es pues m as grande que el de las funciones f.
No obstante, por comodidad podemos introducir el smbolo (x) asociado a la funcional
anterior, tal que
[f] =
_
(x)f(x)dx = f(0). (II.6.24)
Se dene la derivada de L como
L
[f] = L[f
], (II.6.25)
para que se siga cumpliendo formalmente la integraci on por partes. De esta forma,
L
g
[f] =
_
(x)f(x)dx =
_
g(x)f
(x)dx = L
g
[f] (II.6.26)
y, en particular,
[f] = [f
] = f
(0). (II.6.27)
La funcional de Heaviside se dene como
H[f] =
_
0
f(x)dx, (II.6.28)
que corresponde a g(x) = H(x), con
H
[f] = H[f
] =
_
0
f
(x)dx = f(0). (II.6.29)
Por lo tanto, H
= .
Problema sugerido II.6.3: Demostrar que, considerando a [x[ una distribuci on,
d[x[
dx
= H(x) H(x),
d
2
[x[
dx
2
= 2(x).
Las distribuciones son funcionales lineales continuas sobre D. La continuidad signi-
ca que si f
n
(x) es una sucesi on de funciones tal que, para n , f
n
y sus derivadas
tienden a 0 uniformemente L[f
n
] 0. Las distribuciones forman, pues, un espacio
vectorial (denominado el espacio dual de D). Para un espacio nito el dual es equivalente
al espacio, pero esto no es necesariamente v alido para un espacio de dimensi on innita.
Se dice que una distribuci on L se anula en un intervalo I si L[f] = 0 f que sea
no nula solamente en I. En este caso, L[f] no depender a de los valores que tome f en I.
Con esta denici on, podemos decir que (x) = 0 x ,= 0 y que H(x) = 0 si x < 0. El
soporte de una distribuci on es el conjunto cerrado de puntos donde L no se anula (o sea, el
conjunto cerrado m as chico fuera del cual L se anula). De esta forma, el soporte de (x) es
el punto x = 0 mientras que el soporte de H(x) es el semieje x 0. El soporte singular
de una distribuci on L
g
es el conjunto cerrado m as chico fuera del cual L es equivalente a
una funci on g(x) derivable a cualquier orden. El soporte singular de (x) (y tambi en de
H(x)) es, pues, el punto x = 0.
86
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
II.6.5. Funci on de Green de ecuaciones lineales de primer orden
Consideremos, primero, el caso sencillo de una unica ecuaci on lineal inhomog enea de
primer orden
du
dt
a(t)u = f(t), (II.6.30)
es decir,
L[u(t)] = f(t), (II.6.31)
con L =
d
dt
a(t) un operador lineal. Hemos visto que la soluci on para u(t
0
) = u
0
es
u(t) = k(t, t
0
)u
0
+
_
t
t
0
k(t, s)f(s)ds, (II.6.32)
con
k(t, t
) = exp
__
t
t
a(s)ds
_
= u
h
(t)/u
h
(t
)
y u
h
(t) = exp[
_
a(t)dt] una soluci on arbitraria de la ecuaci on homog enea. Consideremos
ahora el caso en que t
0
, con u
0
= 0, y
f(t) = (t t
)
Obtenemos, si t ,= t
,
u(t) =
_
t
k(t, s)(s t
)ds =
_
k(t, t
) t > t
0 t < t
La soluci on anterior es la funci on de Green causal del problema y se la dene t en la
forma
g(t, t
) k(t, t
)H(t t
). (II.6.33)
La funci on de Green desempe na un papel central en la descripci on matem atica de fen ome-
nos fsicos, y se la denomina a veces tambi en funci on respuesta. La ecuaci on (II.6.33)
representa la respuesta del sistema en t frente a una fuente puntual actuando en t
, estan-
do el sistema en reposo para t < t
. Debe consider arsela como una distribuci on. Queda
denida por la ecuaci on
L[g(t, t
)] = (t t
) (II.6.34)
y la condici on inicial g(t, t
) = 0 si t t
. Puede vericarse que la ecuaci on (II.6.33)
satisface (II.6.34), tanto por derivaci on de la distribuci on k(t, t
)H(t t
) como por apli-
caci on del primer miembro de (II.6.34) a una funci on de prueba arbitraria. Para t > t
,
g(t, t
) es la soluci on de la ecuaci on homog enea con la condici on inicial lm
tt
+ g(t, t
) =
k(t
, t
) = 1. Recordemos tambi en que, a diferencia de g(t, t
), k(t, t
) es soluci on del sis-
tema homog eneo: L[g(t, t
)] = 0 t.
87
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
La soluci on de (II.6.31), con la condici on inicial u
0
= 0 para t
0
= , puede enton-
ces escribirse como
u(t) =
_
g(t, t
)f(t
)dt
, (II.6.35)
donde el lmite superior puede extenderse hasta , ya que g(t, t
) es nula para t
> t.
Dado que
f(t) =
_
f(t
)(t t
)dt
,
la ecuaci on (II.6.35) puede interpretarse como la suma de las soluciones particulares para
cada uno de los t erminos f(t
)(t t
).
Problema sugerido II.6.4: Utilizando (II.6.34) vericar que
L[u(t)] =
_
(t t
)f(t
)dt
= f(t).
El operador lineal G denido por
G[f(t)] =
_
g(t, t
)f(t
)dt
desempe na, entonces, el papel de inversa (a derecha) del operador L, ya que L[G[f(t)]] =
f(t) funci on de prueba f(t). Observemos que, si nos restringimos a soluciones que
cumplen u(t
0
) = 0, con t
0
= , la soluci on dada por (II.6.35) es la unica solu-
ci on de (II.6.31). Notemos tambi en que la aplicaci on de L a una funci on de prueba u(t)
puede escribirse en forma similar en t erminos de una distribuci on L(t, t
): L[u(t)] =
_
L(t, t
)u(t
)dt
, con L(t, t
) =
(t t
) a(t)(t t
).
Si a(t) depende de t, el operador L no es invariante frente a traslaciones temporales
por lo que g(t, t
) depender a en general de t y t
y no s olo de t t
. Por ejemplo, si
a(t) = 2t, g(t, t
) = e
(t+t
)(tt
)
H(t t
). En cambio, si a(t) = a, constante, L
es invariante frente a traslaciones en el tiempo, por lo que g(t, t
) depender a s olo de la
diferencia t t
. En este caso,
g(t, t
) = e
a(tt
)
H(t t
)
y se la escribe, normalmente, como g(t t
).
Mencionemos nalmente que la soluci on general (II.6.32) puede escribirse, para t >
t
0
, tambi en como
u(t) = g(t, t
0
)u
0
+
_
t
0
g(t, t
)f(t
)dt
, t > t
0
.
II.6.6. Matriz de Green de sistemas lineales
Podemos, ahora, considerar el caso general y volver a la denici on de nuestra matriz
de Green en la f ormula (II.4.22), y escribirla como distribuci on
G(t, t
) K(t, t
)H(t t
) (II.6.36)
88
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
donde
K(t, t
) = U(t)U
1
(t
)
y U(t) es una matriz fundamental del sistema.
Podemos tambi en escribir el sistema de n ecuaciones lineales,
du
dt
A(t)u = f(t), (II.6.37)
como
L[u(t)] = f(t), L = I
d
dt
A(t) , (II.6.38)
con u, f de n 1 y A de n n.
Dado que K(t, t
) = 0 es soluci on de la ecuaci on homog enea, G(t, t
) satisface
L[G(t, t
)] = I(t t
) , (II.6.39)
donde I es la identidad de n n, con G(t, t
) = 0 para t t
. La soluci on de (II.6.37)
para u(t
0
) = 0 y t
0
puede, entonces, escribirse como
u(t) =
_
G(t, t
)f(t
)dt
. (II.6.40)
En particular, si f(t) = f
0
(t t
), con f
0
constante,
u(t) = G(t, t
)f
0
,
es decir,
u
i
(t) =
j
G
ij
(t, t
)f
0j
. (II.6.41)
El elemento de matriz G
ij
(t, t
) representa, entonces, el efecto en el tiempo t en la com-
ponente i de una fuente puntual actuando en el tiempo t
en la componente j. Como
lm
tt
+
G(t, t
) = I
para t > t
, la columna j de G(t, t
) es la soluci on del sistema homog eneo con la condici on
inicial u
i
(t
) =
ij
. Esto puede utilizarse para hallar G(t, t
).
Matriz constante. Si A(t) = A, constante U(t) = exp[At]U
0
y K(t, t
) = exp[A(t
t
)], por lo que
G(t, t
) = exp[A(t t
)]H(t t
). (II.6.42)
En este caso, G(t, t
) = G(t t
), es decir, es una funci on de t t
debido a la invariancia
de la ecuaci on homog enea frente a traslaciones temporales.
89
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
II.6.7. Funci on de Green para la ecuaci on lineal de orden n
Consideremos ahora la ecuaci on
d
n
u
dt
n
+a
n1
(t)
d
n1
u
dt
n1
+. . .+a
1
(t)
du
dt
+ a
0
(t)u = f(t). (II.6.43)
Como hemos visto en II.5, esta ecuaci on puede escribirse como
du
dt
A(t)u = f(t) ,
con
u =
_
_
_
_
u
du/dt
. . .
d
n1
u/dt
n1
_
_
_
_
, f(t) =
_
_
_
_
0
0
. . .
f(t)
_
_
_
_
, (II.6.44)
A(t) =
_
_
_
_
0 1 0 . . .
0 0 1 . . .
. . . 1
a
0
(t) a
1
(t) . . . a
n1
(t)
_
_
_
_
. (II.6.45)
Consideraremos a
i
(t) y f(t) continuas en un intervalo cerrado I, en el cual se aplicar an
las consideraciones siguientes.
Como f(t) aparece en la ultima la en (II.6.44), y s olo nos interesa conocer u(t),
bastar a con evaluar el elemento
g(t, t
) = G
1n
(t, t
)
de la matriz de Green, que satisface la ecuaci on
d
n
g
dt
n
+a
n1
(t)
d
n1
g
dt
n1
+. . .+a
1
(t)
dg
dt
+a
0
(t)g = (tt
), (II.6.46)
con g(t, t
) = 0 si t < t
, y que, para t > t
, es la soluci on de la ecuaci on homog enea con
la condici on inicial
g(t
, t
) = 0,
dg
dt
[
t=t
= 0, . . .
d
n2
g
dt
n2
[
t=t
= 0,
d
n1
g
dt
n1
[
t=t
= 1,
(recordemos que lm
tt
+
G(t
, t
) = I). Tanto g como las derivadas
d
k
dt
k
g(t, t
) para k =
1, . . . , n2, son, pues, continuas en t = t
. S olo la derivada de orden n1 es discontinua,
lo que asegura que se satisfaga (II.6.46). La expresi on explcita de g(t, t
) puede obtenerse
multiplicando el resultado (II.5.16) por H(t t
): g(t, t
) = K
1n
(t, t
)H(t t
).
Si tanto u como sus derivadas se anulan para t = t
0
, y t
0
, la soluci on de la
ecuaci on inhomog enea (II.6.43) es
u(t) =
_
g(t, t
)f(t
)dt
.
90
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
Si f(t) = 0 para t 0, u(t) =
_
0
g(t, t
)f(t
)dt
.
En el caso de coecientes constantes,
g(t, t
) = g(t t
), con g(t) = exp[At]
1n
H(t) = u
n
(t)H(t)
donde u
n
(t) es la soluci on de la ecuaci on homog enea con la condici on inicial u
(k)
n
(0) = 0,
k = 0, . . . , n 2, u
(n1)
n
(0) = 1.
Ejemplo II.6.1: Ecuaci on lineal de orden 2 con coecientes constantes
d
2
u
dt
2
+ 2a
du
dt
+ bu = f(t). (II.6.47)
Las races de la ecuaci on caracterstica
P() =
2
+ 2a + b = 0
son
= a r, con r =
a
2
b. La soluci on general de la ecuaci on homog enea es,
si
+
,=
,
u
h
(t) = c
+
e
+
t
+ c
t
y la soluci on para u(0) = u
0
, v(0) = v
0
es
u
h
(t) = e
at
[u
0
cosh(rt)+
v
0
+au
0
r
sinh(rt)]. (II.6.48)
La funci on de Green se obtiene reemplazando u
0
= 0, v
0
= 1 y multiplicando por H(t):
g(t) =
1
r
e
at
sinh(rt)H(t) (II.6.49)
y satisface
d
2
g
dt
2
+ 2a
dg
dt
+bg = (t).
Si r = 0 (
+
=
) la soluci on de la ecuaci on homog enea para u(0) = 0, v(0) = 1 es
u
h
(t) = e
at
t y, entonces,
g(t) = e
at
tH(t), (II.6.50)
resultado que puede obtenerse directamente de (II.6.49) tomando el lmite r 0.
Si f(t) = 0 para t < 0 y el sistema est a en reposo hasta t = 0, la soluci on de (II.6.47)
para t > 0 es, pues,
u(t) =
1
r
_
t
0
e
a(tt
)
sinh[r(tt
)]f(t
)dt
. (II.6.51)
Como ejemplo fsico, podemos considerar la ecuaci on de movimiento cl asica de una
partcula de masa m colgada de un resorte en un medio viscoso, en presencia de una
fuerza F(t):
m
d
2
u
dt
2
+
du
dt
+ ku = F(t),
91
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
donde > 0 es el coeciente de rozamiento din amico, k > 0 la constante del resorte y u
la coordenada vertical medida desde la posici on de equilibrio (el peso mg que aparecera
en el lado derecho se cancela al efectuar la traslaci on u u mg/k, donde mg/k es la
posici on de equilibrio; en forma an aloga podemos tambi en cancelar el promedio
F(t) en
un cierto tiempo). Esta ecuaci on corresponde a
a =
2m
, b =
k
m
, f(t) =
F(t)
m
.
Si a
2
> b (
2
> 4mk) r es real y g(t) es una combinaci on de decaimientos exponen-
ciales (como r < a, a r son positivos).
Si a
2
= b (
2
= 4mk) r = 0 y obtenemos el resultado (II.6.50).
Finalmente, si a
2
< b (
2
< 4mk) r es imaginario: r = i, con =
b a
2
real, y
g(t) =
1
e
at
sin(t)H(t),
que representa un movimiento oscilatorio amortiguado para t > 0.
Notemos tambi en que, si a = 0 (roce nulo),
g(t) =
1
sin(t)H(t)
representa un movimiento oscilatorio arm onico para t > 0, con =
b, mientras que si
a = b = 0,
g(t) = tH(t),
que representa un movimiento uniforme para t > 0. Este caso corresponde a la ecuaci on
d
2
u
dt
2
= f(t)
y su soluci on para t > 0 y u(0) = u
(0) = 0 es entonces
u(t) =
_
t
0
(t t
)f(t
)dt
que equivale, tras una integraci on por partes, a
u(t) =
_
t
0
dt
_
t
0
f(t
)dt
.
Ejemplo II.6.2: Ecuaci on lineal de orden n con coecientes constantes:
La ecuaci on caracterstica es
P() =
n
+a
n1
n1
+. . .+a
1
+a
0
= 0.
92
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
Si P posee n races
k
distintas, la soluci on general de la ecuaci on homog enea es
u
h
(t) =
n
k=1
c
k
e
k
t
.
Construyendo la soluci on particular para u
(i)
(0) = 0 si i = 0, . . . , n2, con u
(n1)
(0) = 1,
puede mostrarse que (v ease (II.5.21))
g(t) =
n
k=1
e
k
t
P
(
k
)
H(t). (II.6.52)
Como P() =
n
k=1
(
k
), P
(
k
) =
j=k
(
k
j
). Por ejemplo, para n = 2
obtenemos
g(t) =
e
1
t
e
2
t
2
H(t).
Reemplazando 1
2
= a r, se obtiene la ecuaci on (II.6.49).
Si existen races con multiplicidad > 1, g(t, t
) puede obtenerse como lmite del re-
sultado (II.6.52).
Ejemplo II.6.3: Consideremos la ecuaci on de primer orden
du
dt
au = f
0
e
t
H(t). (II.6.53)
La soluci on para t > 0 y u(0) = 0, es, si a ,= ,
u(t) = f
0
_
g(t t
)e
t
H(t
)dt
= f
0
e
t
e
at
a
. (II.6.54)
El primer t ermino u
p
(t) =
f
0
a
e
t
es una soluci on particular de la ecuaci on inhomog enea
que puede obtenerse directamente reemplazando u
p
(t) = ce
t
en (II.6.53), lo que conduce
a c = f
0
/(a). El segundo t ermino u
h
(t) =
f
0
a
e
at
es una soluci on de la ecuaci on ho-
mog enea ajustada para que u(0) = 0. Si la ecuaci on homog enea describe un decaimiento
a < 0, en cuyo caso u
h
(t) es un t ermino transitorio que se apaga al aumentar t.
Si a en (II.6.54), encontramos como lmite
u(t) = f
0
e
at
t, (II.6.55)
resultado que puede obtenerse directamente de la integral en (II.6.54) para = a. Note-
mos la dependencia lineal con t.
El resultado (II.6.54) es v alido para cualquier ,= a, en particular = i, con
real, que corresponde al caso de una fuerza peri odica sinusoidal. Si a y f
0
son reales, la
parte real de (II.6.54) es la soluci on para f(t) = f
0
cos(t) y la parte imaginaria para
f(t) = f
0
sin(t). Vemos de (II.6.54) que la soluci on particular oscilar a con la misma
93
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
frecuencia externa pero con una amplitud f
0
/(i a) que depende de la frecuencia, y
que tiende a 0 para .
Por ejemplo, en un circuito con inducci on L, resistencia R y potencial V (t), la co-
rriente I satisface la ecuaci on
L
dI
dt
+ RI = V (t),
que corresponde a a = R/L, f(t) = V (t)/L. El caso = i corresponde a un circuito
con corriente alterna V (t) = V
0
e
it
.
Ejemplo II.6.4:
d
2
u
dt
2
+ 2a
du
dt
+ bu = f
0
e
t
H(t). (II.6.56)
La soluci on para t > 0 y u(0) = 0, u
(0) = 0, es
u(t) = f
0
_
t
0
g(t t
)e
t
dt
= u
p
(t) + u
h
(t). (II.6.57)
Si no es raz de la ecuaci on caracterstica, es decir, ,=
, con
= a r, y
r =
a
2
b, obtenemos, para r ,= 0,
u
p
(t) =
f
0
e
t
(
+
)(
)
=
f
0
e
t
2
+2a+b
, (II.6.58)
u
h
(t) =
f
0
e
at
[cosh[rt]+(+a) sinh[rt]]/r
(
+
)(
)
.
Nuevamente, u
p
(t) es una soluci on particular que puede obtenerse reemplazando u
p
(t) =
ce
t
en (II.6.56) y u
h
(t) una soluci on de la ecuaci on homog enea ajustada de modo tal que
u(0) = 0.
Si
= a r (resonancia) se tiene
u
p
(t) =
f
0
e
t
t
2r
, u
h
(t) =
f
0
e
at
sinh[rt]
2r
2
, (II.6.59)
que pueden obtenerse como lmite del resultado anterior o por integraci on de (II.6.57). Si
a = 0 y r = i, con real, tenemos el caso propiamente resonante, en el que la amplitud
de la oscilaci on resultante es proporcional a t.
Si r 0 (raz doble) y ,= a,
u
p
(t) =
f
0
e
t
(+a)
2
, u
h
(t) =
f
0
e
at
[1 + (a + )t]
(+a)
2
.
Finalmente, si r 0 y a,
u
p
(t) =
1
2
f
0
e
at
t
2
, u
h
(t) = 0.
94
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
Por ultimo, mencionemos que para una fuerza f(t) = f
0
t
n
, con
,= 0, u
p
(t) ser a, en
general, un polinomio de grado n mientras que, si una raz es nula (por ejemplo,
= 0),
u
p
(t), ser a un polinomio de grado n + 1.
Ejemplo II.6.5:
du
dt
Au = f
0
e
t
H(t), (II.6.60)
con u, f
0
de n 1, A de n n. Si u(0) = 0, la soluci on para t > 0 es
u(t) =
_
t
0
exp[A(t t
)]f
0
e
t
dt
= u
p
(t) +u
h
(t), (II.6.61)
donde u
p
(t) es una soluci on particular de la ecuaci on inhomog enea y u
h
(t) = exp[At]u
0
una soluci on de la ecuaci on homog enea que ajusta la condici on inicial.
Si no coincide con ning un autovalor
k
de A, u
p
(t) puede elegirse de la forma
(m etodo de coecientes indeterminados)
u
p
(t) = ce
t
.
Reemplazando en (II.6.60) se obtiene
(I A)ce
t
= f
0
e
t
,
de donde
c = (I A)
1
f
0
.
Adem as, u
h
(t) = exp[At]c (para que u(0) = 0) y entonces
u(t) = (e
t
I exp[At])(I A)
1
f
0
, ,=
k
. (II.6.62)
Para = i ,=
k
, obtenemos el conocido e importante resultado que la soluci on particu-
lar de (II.6.61) tendr a la misma frecuencia que el t ermino inhomog eneo, con una amplitud
dependiente de la frecuencia.
En cambio, si coincide con un autovalor
k
de multiplicidad m
k
, (I A) no es
invertible y la soluci on anterior no es v alida en general. u
p
(t) contendr a t erminos de la
forma e
k
t
t
m
, con m m
k
, y puede hallarse evaluando (II.6.61) en una base conveniente
o bien tomando el lmite de (II.6.62). Por ejemplo, si m
k
= 1, u
p
(t) ser a de la forma
u
p
(t) = (c + v
k
t)e
k
t
,
donde Av
k
=
k
v
k
. Reemplazando en (II.6.61) obtenemos
(
k
I A)c + v
k
= f
0
,
de donde puede obtenerse c eligiendo tal que f
0
v
k
sea ortogonal a v
k
.
95
II.6 INTRODUCCI
ON A LA TEOR
IA DE DISTRIBUCIONES. FUNCI
ON
DE GREEN CAUSAL.
96
Captulo III
Ecuaciones Diferenciales Ordinarias:
Problemas con Condiciones de
Contorno
97
III.1 EL PROBLEMA DE STURM-LIOUVILLE
III.1. El problema de Sturm-Liouville
III.1.1. Problemas de Sturm-Liouville no singulares
Hasta ahora hemos visto ecuaciones diferenciales con condiciones iniciales. En parti-
cular tratamos la ecuaci on lineal ordinaria de segundo orden, aqu ella en que las constantes
de integraci on se determinaban a partir de los valores de la funci on inc ognita y su deri-
vada primera en un instante inicial t = t
0
. Ahora comenzaremos a estudiar problemas de
segundo orden en los cuales las constantes de integraci on quedan determinadas, no por
condiciones iniciales, sino por condiciones de contorno. En tales problemas, el rango de
variaci on de la variable (que representar a usualmente una posici on) est a restringido a un
cierto intervalo y las constantes de integraci on se determinan a partir de los valores de
la funci on inc ognita, de su derivada, o de combinaciones lineales de las mismas, en los
puntos extremos del intervalo.
Tomemos una ecuaci on lineal de segundo orden general
d
2
u
dx
2
+ A(x)
du
dx
+B(x)u = F(x) , (III.1.1)
con A(x), B(x) y F(x) continuas. Tal ecuaci on es equivalente a
d
dx
[p(x)
du
dx
] + q(x)u = f(x), (III.1.2)
donde f(x) = p(x)F(x), q(x) = p(x)B(x) y
p(x) = e
A(x)dx
es una funci on positiva.
En efecto, como p
(x) = A(x)p(x), se tiene (pu
= pu
+ p
= p(u
+ A(x)u
),
reduci endose (III.1.2) a la ecuaci on (III.1.1) multiplicada por p(x).
La ecuaci on (III.1.2) se denomina ecuaci on de Sturm-Liouville inhomog enea (la co-
rrespondiente ecuaci on homog enea se obtiene para f(x) 0) y se escribe usualmente
como
L[u(x)] = f(x), (III.1.3)
donde
L =
d
dx
[p(x)
d
dx
] + q(x)
es el operador lineal de Sturm-Liouville. Tal operador act ua sobre funciones u(x) dos
veces derivables, denidas en un dado intervalo real, a x b, y s olo queda comple-
tamente denido cuando se especican los valores de la funci on inc ognita, su derivada
primera, o combinaciones lineales de ellas en los extremos (a, b) del intervalo. Tales con-
diciones se conocen como condiciones de contorno, y las funciones que las satisfacen
constituyen el dominio del operador de Sturm-Liouville.
99
III.1 EL PROBLEMA DE STURM-LIOUVILLE
Problemas de este tipo aparecen frecuentemente al resolver ecuaciones en derivadas
parciales mediante el m etodo de separaci on de variables, como veremos m as adelante.
Cabe insistir aqu en que estudiaremos primero el caso en que p(x), q(x) y p
(x) son
funciones reales continuas en [a, b] y p(x) > 0 en el mismo intervalo cerrado. En este
contexto, un operador de Sturm-Liouville que satisface tales condiciones, se llama no sin-
gular. M as adelante, analizaremos el caso en que alguna (o algunas) de estas condiciones
no se cumple en alguno de los extremos, que conduce al estudio de las llamadas funciones
especiales.
III.1.2. Tipos de condiciones de contorno
Consideraremos primero la ecuaci on (III.1.3) en un intervalo nito [a, b], con las con-
diciones de contorno conocidas como condiciones de Dirichlet homog eneas,
u(a) = u(b) = 0. (III.1.4)
El primer punto importante a analizar es la existencia o no de soluciones no triviales
u(x) ,= 0 de la ecuaci on homog enea L[u] = 0, que satisfagan las condiciones (III.1.4).
Como veremos, la no existencia de tales soluciones (tambi en llamadas modos cero del
operador) es condici on necesaria y suciente para que la ecuaci on inhomog enea tenga
soluci on unica, que podr a obtenerse mediante la funci on de Green.
Por ejemplo, si
L =
d
2
dx
2
,
(p(x) = 1, q(x) = 0), la soluci on general de la ecuaci on homog enea L[u] = 0 es u(x) =
cx + d. Si u(a) = u(b) = 0 c = d = 0. La ecuaci on homog enea s olo admite, pues, la
soluci on trivial.
Como segundo ejemplo, si
L =
d
2
dx
2
k
2
,
la ecuaci on L[u] = 0 posee la soluci on u(x) = ce
ikx
+de
ikx
, que se puede escribir como
u(x) = c
sin(k(x a)) + d
cos(k(x a)).
Si u(a) = 0 d
= 0, y la condici on u(b) = 0 implica
c
sin[k(b a)] = 0,
que posee una soluci on no trivial (c
,= 0) si y s olo si
k(b a) = n , n Z.
En caso contrario c
= 0 y la unica soluci on es u(x) 0.
100
III.1 EL PROBLEMA DE STURM-LIOUVILLE
Las condiciones de contorno (III.1.4) no son m as que un caso muy particular. En
general, las condiciones de contorno que denen el dominio de un operador de Sturm-
Liouville pueden ser de dos tipos: locales (o separadas) o no locales. Se llama condiciones
locales a aqu ellas que establecen una relaci on entre la funci on inc ognita y su derivada en
cada borde por separado. Entre estas, nos concentraremos en las llamadas condiciones de
contorno de Robin homog eneas:
c
a
u(a) + d
a
u
(a) = 0, c
b
u(b) + d
b
u
(b) = 0. , (III.1.5)
donde todas las constantes son reales. Si d
a
= d
b
= 0, estas se reducen a las de
Dirichlet homog eneas mientras que, si c
a
= c
b
= 0, se obtienen las condiciones de
Neumann homog eneas, u
(a) = u
(b) = 0. Por supuesto, puede tenerse tambi en d
a
=
c
b
= 0, en cuyo caso se obtienen las condiciones mixtas u(a) = 0, u
(b) = 0 (Dirichlet en
un extremo y Neumann en el otro). Si todos los coecientes son no nulos, las condiciones
de contorno se llaman condiciones de Robin. En todos los casos, la condici on impuesta
en un extremo es independiente de la impuesta en el otro, de ah proviene el nombre de
locales o separadas.
Notemos que el conjunto de funciones que satisfacen condiciones de contorno del
tipo (III.1.5) constituye un espacio vectorial (si u
1
y u
2
las satisfacen, c
1
u
1
+ c
2
u
2
tambi en las satisface). No ocurre lo mismo para condiciones de contorno no homog eneas
(combinaci on lineal de u y su derivada igualada a una constante distinta de cero).
Las condiciones de contorno no locales, en cambio, establecen una relaci on entre el
valor que toman la funci on inc ognita y su derivada en uno y otro borde. Tpicos ejemplos
de condiciones de contorno no locales son las condiciones peri odicas
u(a) = u(b), p(a)u
(a) = p(b)u
(b) (III.1.6)
y antiperi odicas
u(a) = u(b), p(a)u
(a) = p(b)u
(b) . (III.1.7)
Volveremos a considerar condiciones de contorno no locales en nuestra secci on dedi-
cada a la serie de Fourier (ver Captulo IV).
III.1.3. Car acter autoadjunto del operador
Una propiedad fundamental del operador L con las condiciones de contorno
(III.1.5), (III.1.6) o (III.1.7) es que resulta autoadjunto
1
:
Teorema III.1.1 Si u y v son dos funciones reales que satifacen ambas alguna de las
condiciones de contorno (III.1.5), (III.1.6) o (III.1.7) (con las mismas condiciones de con-
torno para u y v), entonces se cumple
1
M as rigurosamente, deberamos decir que resulta sim etrico. Sin embargo, la diferencia entre ambos
conceptos es materia de cursos m as avanzados. A este nivel y en todo el resto de este libro, obviaremos tal
diferencia. Para una discusi on detallada sobre este punto v ease, por ejemplo, [12]
101
III.1 EL PROBLEMA DE STURM-LIOUVILLE
(v, L[u]) = (L[v], u), (III.1.8)
donde (v, u) denota el producto interno usual
(v, u) =
_
b
a
v(x)u(x)dx.
(hemos supuesto u, v reales). Se dice, entonces, que L es autoadjunto.
Demostraci on: En efecto, integrando por partes obtenemos
(v, L[u]) (L[v], u) =
_
b
a
[v(pu
u(pv
]dx
=
_
b
a
[(vpu
(upv
]dx
= p[vu
uv
][
b
a
= pW(v, u)[
b
a
= 0, (III.1.9)
para las condiciones (III.1.5), (III.1.6) o (III.1.7). Es f acil vericar que el Wronskiano
W(u, v) se anula independientemente en cada extremo para funciones que satisfacen
condiciones de contorno de Robin homog eneas, y que la contribuci on de un extremo se
cancela con la del otro extremo para funciones que satisfacen condiciones de contorno
peri odicas o antiperi odicas.
Notemos que la noci on de operador autoadjunto sobre un espacio de funciones es
extensi on natural de la denici on de matriz autoadjunta. En efecto, en el caso de vecto-
res u de R
n
y operadores lineales representados por matrices A reales de n n, con el
producto interno usual (v, u) = v u =
n
i=1
v
i
u
i
, A se dice sim etrica (o autoadjun-
ta, que es equivalente para matrices reales) si (v, Au) = (Av, u) u, v R
n
, o sea,
si
i,j
v
i
A
ij
u
j
=
i,j
u
i
A
ij
v
j
. Esto implica A
ij
= A
ji
i, j, es decir, A
tr
= A. Los
operadores lineales reales autoadjuntos en R
n
son, pues, representados por matrices A
autoadjuntas. Pero notar: en el caso de espacios vectoriales de dimensi on innita, los do-
minios del operador y de su adjunto deben coincidir para que el operador sea autoadjunto,
es decir, no basta que las expresiones diferenciales de ambos coincidan. La coincidencia
de dominios ocurre en nuestro caso.
Como veremos a continuaci on, el car acter autoadjunto del operador tiene consecuen-
cias muy importantes: la funci on de Green asociada, si existe, resulta sim etrica ante el
intercambio de sus dos variables y se satisface, por lo tanto, la propiedad de reciprocidad
(ver secci on III.1.4). Por otra parte, el operador tiene un conjunto completo de autofun-
ciones, que son una base del espacio vectorial de funciones en el dominio (ver secci on
III.1.5).
102
III.1 EL PROBLEMA DE STURM-LIOUVILLE
III.1.4. Funci on de Green para condiciones de contorno locales. So-
luci on del problema de borde con ecuaci on diferencial inho-
mog enea
Consideremos, ahora, la ecuaci on inhomog enea (III.1.3). Como en los problemas
de condiciones iniciales, la herramienta general de resoluci on ser a la funci on de Green
G(x, x
) del operador L con las condiciones de contorno (III.1.5).
Se dene dicha funci on de Green como la soluci on de la ecuaci on (el subndice en el
operador indica que el mismo act ua sobre el primer argumento de la funci on de Green)
L
x
[G(x, x
)] = (x x
), (III.1.10)
(donde a < x, x
< b) que satisface, en su primera variable, las condiciones de contorno
(III.1.5), es decir
c
a
G(a, x
) + d
a
dG
dx
(x = a, x
) = 0,
c
b
G(b, x
) + d
b
dG
dx
(x = b, x
) = 0 . (III.1.11)
Probaremos a continuaci on que:
Teorema III.1.2 i) dicha soluci on existe y es unica si y s olo si la unica soluci on de la
ecuaci on homog enea L[u(x)] = 0 con la condici on de contorno (III.1.5) es la soluci on
trivial u(x) = 0 x [a, b] (no existen modos cero) y
ii) en tal caso, existe una unica soluci on de la ecuaci on inhomog enea (III.1.3) con la
condici on de contorno (III.1.5), dada por la integral:
u(x) =
_
b
a
G(x, x
)f(x
)dx
. (III.1.12)
Demostraci on:
Probaremos primero ii). Resulta claro que, si G(x, x
) existe,
(III.1.12) es soluci on de (III.1.3) pues
L[u(x)] =
_
b
a
L
x
[G(x, x
)]f(x
)dx
=
_
b
a
(x x
)f(x
)dx
= f(x) ,
donde hemos usado, primero, que L act ua sobre la primera variable, no afectada por la
integral, y, en estas condiciones, siempre pueden intercambiarse integral y derivada en el
sentido de las distribuciones. Luego, hemos usado la ecuaci on diferencial que dene a la
funci on de Green y, nalmente, la denici on de la distribuci on delta de Dirac.
Adem as, u cumple la condici on de contorno (III.1.5) pues G la cumple en su primera
variable, no afectada por la convoluci on. En efecto
103
III.1 EL PROBLEMA DE STURM-LIOUVILLE
c
a
u(a) +d
a
u
(a) =
_
b
a
[c
a
G(a, x
) +d
a
dG
dx
(x = a, x
)]f(x
)dx
= 0
c
b
u(b) + d
b
u
(b) =
_
b
a
[c
b
G(b, x
) +d
b
dG
dx
(x = b, x
)]f(x
)dx
= 0
Hemos mostrado, entonces, que (III.1.12) es soluci on.
La unicidad de esta soluci on surge, por el absurdo, una vez probado i). En efecto,
si existen v
1
y v
2
tal que L[v
i
(x)] = f(x), i = 1, 2, satisfaciendo ambas (III.1.5) con
los mismos coecientes, por la linealidad de L se tiene L[v
1
(x) v
2
(x)] = L[v
1
(x)]
L[v
2
(x)] = 0, lo que implica, por i), que v
1
v
2
0 o, equivalentemente, v
1
v
2
.
La prueba de i) se ver a directamente por construcci on de la funci on de Green.
Sean u
1
(x) y u
2
(x) dos soluciones de la ecuaci on homog enea L[u(x)] = 0, cada una
de las cuales satisface la condici on de contorno en uno de los extremos:
c
a
u
1
(a) + d
a
u
1
(a) = 0, c
b
u
2
(b) + d
b
u
2
(b) = 0. (III.1.13)
Por la propiedad de superposici on para L[u(x)] = 0, siempre existen soluciones uni-
cas u
1
(x), u
2
(x) no id enticamente nulas que satisfacen estas condiciones. Por ejemplo, si
v
1
(x) y v
2
(x) son dos soluciones cualesquiera linealmente independientes y no nulas de
L[v] = 0,
u
1
(x) = v
1
(x)[c
a
v
2
(a) + d
a
v
2
(a)] v
2
(x)[c
a
v
1
(a) + d
a
v
1
(a)],
u
2
(x) = v
1
(x)[c
b
v
2
(b) + d
b
v
2
(b)] v
2
(x)[c
b
v
1
(b) + d
b
v
1
(b)],
satisfacen (III.1.13).
Por otro lado, para p y q continuos y p > 0, no pueden existir dos soluciones lineal-
mente independientes que satisfagan ambas la condici on de contorno en uno cualquiera
de los extremos del intervalo (pues, de ser as, el determinante de la matriz fundamental,
es decir el wronskiano de estas soluciones, sera nulo en ese extremo).
Para x < x
, L[G(x, x
)] = 0 y podemos entonces escribir G(x, x
) = c
1
(x
)u
1
(x),
que satisface la condici on de contorno en x = a. An alogamente, si x > x
, G(x, x
) =
c
2
(x
)u
2
(x), que satisface la condici on en x = b. Por lo tanto,
G(x, x
) =
_
c
1
(x
)u
1
(x) x < x
c
2
(x
)u
2
(x) x > x
. (III.1.14)
Integrando (III.1.10) entre x
y x
+ ,
con > 0, obtenemos
[p(x)G
(x, x
)][
x=x
+
x=x
+
_
x
+
x
q(x
)G(x, x
)dx
= 1
donde G
(x, x
) =
d
dx
G(x, x
).
Debido a la continuidad de p y q, esta ecuaci on puede satisfacerse s olo si G(x, x
) es
continua y su derivada tiene una discontinuidad 1/p(x
) en x = x
(es decir, p(x)G
(x, x
)
104
III.1 EL PROBLEMA DE STURM-LIOUVILLE
debe ser de la forma H(xx
) +(x), con continua en x = x
, para que (pG
con-
tenga un t ermino (x x
)).
Esto implica
c
1
(x
)u
1
(x
) c
2
(x
)u
2
(x
) = 0,
c
1
(x
)u
1
(x
) c
2
(x
)u
2
(x
) =
1
p(x
)
,
con u
(x) =
du
dx
, lo que determina c
1
y c
2
:
c
1
(x
) = u
2
(x
)/C, c
2
(x
) = u
1
(x
)/C ,
donde
C = p(x
)[u
1
(x
)u
2
(x
) u
2
(x
)u
1
(x
)]
= [pW(u
1
, u
2
)]
x=x
, W(u
1
, u
2
) =
u
1
u
2
u
1
u
.
La soluci on existe s olo si C ,= 0, o sea, s olo si el Wronskiano W(u
1
, u
2
) es no nulo.
Esto se cumple si u
1
(x) y u
2
(x) son dos soluciones linealmente independientes de L[u] =
0.
En estas condiciones, C es una constante, independiente de x
:
[p(u
1
u
2
u
2
u
1
)]
= p
(u
1
u
2
u
2
u
1
) +p(u
1
u
2
u
2
u
1
)
= u
1
(pu
2
)
u
2
(pu
1
)
= q(u
1
u
2
u
2
u
1
) = 0.
El resultado nal para C ,= 0 es, pues,
G(x, x
) =
_
u
1
(x)u
2
(x
)/C x x
u
1
(x
)u
2
(x)/C x x
. (III.1.15)
Si C = 0, la funci on de Green no existe. En este caso las soluciones u
1
(x) y u
2
(x)
son linealmente dependientes, es decir, u
2
(x) = cu
1
(x), por lo que u
1
(x) satisface la
condici on de contorno en ambos extremos. Esto implica que, si C = 0, existe una soluci on
no trivial u
1
,= 0 que satisface L[u
1
] = 0 y las condiciones de contorno (III.1.5). En
otras palabras, la funci on de Green existe si y s olo si la unica soluci on de la ecuaci on
homog enea L[u] = 0 que satisface las condiciones (III.1.5) es u = 0. Esto concluye la
prueba de i) y, al mismo tiempo, (III.1.15) da una expresi on explcita para la funci on de
Green.
105
III.1 EL PROBLEMA DE STURM-LIOUVILLE
N otese que el resultado es completamente an alogo al que se obtiene al resolver sis-
temas de ecuaciones lineales algebraicas Ax = b, con A una matriz de n n, y x, b
vectores columna de n 1. Si la unica soluci on al sistema homog eneo Ax = 0 es x = 0,
entonces existe la inversa A
1
, denida por AA
1
= I, con I la identidad (es decir,
(AA
1
)
i,j
=
ij
) y, en este caso, la soluci on de Ax = b es unica y est a dada por x = A
1
b
(o sea, x
i
=
j
A
1
ij
b
j
). En cambio, si existe x ,= 0 t.q. Ax = 0, la inversa A
1
no existe.
El operador lineal denido por
G[u(x)] =
_
b
a
G(x, x
)u(x
)dx
(III.1.16)
es, pues, el inverso del operador L y se lo denota, tambi en, como L
1
.
Notemos que i) el inverso del operador diferencial lineal L es un operador lineal in-
tegral (G(x, x
) se conoce como el n ucleo del operador integral) y que ii) G depende no
s olo de los coecientes p(x), q(x) de L, sino tambi en de la condici on de contorno.
Volviendo a la ecuaci on (III.1.15), observemos tambi en, la simetra
G(x, x
) = G(x
, x) , (III.1.17)
que permite enunciar la
Propiedad de reciprocidad: La respuesta del sistema en x frente a una fuente puntual
en x
es id entica a la respuesta del sistema en x
frente a una fuente puntual en x, a un si p y
q dependen de x. Esto se debe al car acter autoadjunto de L. En efecto, debido tal car acter:
(L
x
G(x, x
), G(x, x
)) = (G(x, x
), L
x
G(x, x
)) .
Usando la ecuaci on diferencial que satisface la funci on de Green, y la denici on de la
delta de Dirac:
_
b
a
dx(x x
)G(x, x
) =
_
b
a
dxG(x, x
)(x x
) ,
que conduce a
G(x
, x
) = G(x
, x
).
A partir de (III.1.17), es f acil ver que el operador inverso G, denido en (III.1.16) es
tambi en autoadjunto: (v, G[u]) =
_
b
a
_
b
a
v(x)G(x, x
)u(x
)dxdx
= (G[v], u).
Obs ervese que la funci on de Green (III.1.15) no es invariante frente a traslaciones
espaciales (debido a las condiciones de contorno). La invariancia traslacional est a rota,
aun si p y q son constantes, por lo que G(x, x
) ,= G(x x
).
Utilizando (III.1.15), vemos que la soluci on (III.1.12) puede escribirse como
u(x) =
1
C
[u
2
(x)
_
x
a
u
1
(x
)f(x
)dx
+ u
1
(x)
_
b
x
u
2
(x
)f(x
)dx
]
106
III.1 EL PROBLEMA DE STURM-LIOUVILLE
y puede vericarse explcitamente que L[u] = f. Siempre es posible escribirla en
la forma u(x) = u
p
(x) + u
h
(x), donde u
p
es una soluci on particular de la ecuaci on
inhomog enea (L[u
p
] = f) y u
h
una soluci on de la ecuaci on homog enea (L[u
h
] = 0)
ajustada para satisfacer la condici on de contorno.
Ejemplo III.1.1 : L =
d
2
dx
2
(p(x) = 1, q(x) = 0). En este caso, tomando a = 0, b > 0
y u(0) = u(b) = 0,
u
1
(x) = x, u
2
(x) = x b
y C = x (x b) = b. Obtenemos
G(x, x
) =
_
x(bx
)
b
x x
(bx)
b
x x
. (III.1.18)
La soluci on de la ecuaci on
d
2
u
dx
2
= f(x) ,
para 0 x b con u(a) = u(b) = 0 es, entonces,
u(x) =
_
b
0
G(x, x
)f(x
)dx
=
1
b
[
_
x
0
x
(bx)f(x
)dx
+
_
b
x
x(b x
)f(x
)dx
] .
Por ejemplo, si f(x) = x
2
se obtiene
u(x) =
1
12
x(b
3
x
3
) =
x
4
12
+ x
b
3
12
,
que se compone de la soluci on particular x
4
/12 m as la soluci on de la ecuaci on ho-
mog enea xb
3
/12, que garantiza que se cumpla u(0) = u(b) = 0.
Ejemplo III.1.2: L =
d
2
dx
2
2
, a = 0, b > 0. En este caso, para u(a) = u(b) = 0,
u
1
(x) = sin(x), u
2
(x) = sin((xb))
y C = [sin(x) cos((xb)) cos(x) sin((xb))] = sin(b).
La funci on de Green existe s olo si sin(b) ,= 0, es decir, si ,= n/b, con n Z (ver
ejemplo en la secci on III.1.1). Cuando existe, se tiene
G(x, x
) =
1
sin(b)
_
sin(x) sin((bx
)) x x
sin(x
) sin((bx)) x x
.
107
III.1 EL PROBLEMA DE STURM-LIOUVILLE
Para 0 se recupera el resultado (III.1.18).
Si = ik, con k real, la funci on de Green existe k ,= 0 y se obtiene reemplazando
k, sin sinh en el resultado anterior.
Ejemplo III.1.3:
Consideremos, nuevamente, L =
d
2
dx
2
. Si la condici on de contorno es u
(a) =
u
(b) = 0, la funci on de Green no existe: Tenemos
u
1
(x) = c
1
, u
2
(x) = c
2
y, por lo tanto, C = 0. Esto se debe a que la soluci on constante u(x) = c ,= 0 es soluci on
no nula de L[u] = 0 y satisface u
(a) = u
(b) = 0. Obs ervese que, en este caso, la
soluci on del problema inhomog eneo, si existe, no es unica. En efecto, dada una soluci on,
siempre se le puede sumar una constante arbitraria, que satisface la ecuaci on homog enea
y la condici on de contorno.
Ejemplo III.1.4: Consideremos, ahora, L =
d
2
dx
2
2
, con la condici on u
(a) = u
(b) =
0.
Tenemos
u
1
(x) = cos(x), u
2
(x) = cos((x b)),
con C = sin(b).
La funci on de Green existe nuevamente s olo si sin(b) ,= 0, es decir, si
,= n/b, con n Z. En esas condiciones,
G(x, x
) =
1
sin(b)
_
cos(x) cos((bx
)) x x
cos(x
) cos((bx)) x x
.
Si 0, [G(x, x
)[ .
Por otro lado, si = ik, con k real, G(x, x
) existe k ,= 0.
III.1.5. Autovalores y autofunciones del operador de Sturm-Liouville
no singular
Consideremos nuevamente el operador de Sturm-Liouville L. Si existen un n umero
y una funci on v(x) no id enticamente nula, que satisfacen la ecuaci on
L[v(x)] = v(x) (III.1.19)
x [a, b], conjuntamente con alguna de las condiciones de contorno mencionadas en la
secci on III.1.2, se dice que es un autovalor (o valor propio) y v(x) una autofunci on (o
funci on propia) de L con dominio denido por dicha condici on de contorno. Enfatizamos
que y v(x) dependen tanto de p y q como de la condici on de contorno.
108
III.1 EL PROBLEMA DE STURM-LIOUVILLE
Es obvio que, si v(x) es autofunci on, cv(x), con c una constante no nula, es tambi en
autofunci on con el mismo autovalor, por lo que las autofunciones quedan denidas a
menos de una constante multiplicativa.
Hemos visto que la funci on de Green para una determinada condici on de contorno
local (III.1.5) existe si y s olo si no existe una funci on u(x) ,= 0 que satisfaga L[u] = 0
con dichas condiciones. Esto implica que G(x, x
) existe si y s olo si L no posee ning un
autovalor nulo con dicha condici on de contorno (de all proviene el nombre de modos
cero).
Es f acil mostrar el siguiente teorema general
Teorema III.1.3 Si L es autoadjunto, las autofunciones de L correspondientes a autova-
lores distintos son ortogonales con respecto al producto interno (u, v) =
_
b
a
u(x)v(x)dx.
Demostraci on: Si L[v
i
(x)] =
i
v
i
(x), L[v
j
(x)] =
j
v
j
(x),
0 = (v
j
, L[v
i
]) (L[v
j
], v
i
) = (
i
j
)
_
b
a
v
i
(x)v
j
(x)dx. (III.1.20)
Si, seg un la hip otesis,
i
,=
j
resulta que
_
b
a
v
j
(x)v
i
(x)dx = 0.
Este teorema general nos permite armar que las autofunciones correspondientes a
autovalores distintos del operador de Sturm-Liouville que venimos estudiando (con su
dominio denido por las condiciones de contorno (III.1.5), (III.1.6) o (III.1.7)) son orto-
gonales con respecto al producto escalar (u, v) =
_
b
a
u(x)v(x)dx. En efecto se trata de un
operador autoadjunto con respecto al mismo producto escalar.
En forma m as general, en particular al estudiar funciones especiales, surge un pro-
blema similar, en el cual debe encontrarse una funci on v(x) no id enticamente nula que
satisfaga, conjuntamente con la condici on de contorno, la ecuaci on
L[v(x)] = (x)v(x), (III.1.21)
donde (x) > 0 es una funci on real derivable y positiva en (a, b), denominada usualmente
funci on de peso. En este caso, se dice que es autovalor y v autofunci on de L con peso
(y una dada condici on de contorno).
Siguiendo el procedimiento anterior, puede mostrarse que, incluso en el caso singular,
si se imponen sobre las autofunciones del problema las condiciones de acotaci on que se
discutir an en la subsecci on III.2.3, debido al car acter autoadjunto del operador que se de-
mostrar a en el teorema III.2.6, las autofunciones correspondientes a autovalores distintos
resultan ortogonales con respecto al producto interno
109
III.1 EL PROBLEMA DE STURM-LIOUVILLE
(u, v)
_
b
a
(x)u(x)v(x)dx, (III.1.22)
es decir,
_
b
a
(x)v
j
(x)v
i
(x)dx = 0 si
j
,=
i
,
donde L[v
i
(x)] =
i
(x)v
i
(x), L[v
j
(x)] =
j
(x)v
j
(x).
Volveremos sobre este punto en la secci on III.2. En nuestro caso no singular, es directo
ver que es as reemplazando (III.1.21) en (III.1.20).
Propiedades espectrales del problema de Sturm-Liouville no singular:
El problema de valores propios de un operador de Sturm-Liouville no singular con su do-
minio denido por condiciones de contorno locales de Robin (III.1.5) o no locales (III.1.6)
o (III.1.7), posee las siguientes propiedades fundamentales (la demostraci on general de las
mismas se realiza naturalmente en el marco de cursos m as avanzados: ver, por ejemplo,
[12]; por lo tanto, no presentaremos aqu tal demostraci on, aunque la esbozaremos para
algunos casos particulares en la subsecci on III.1.7):
1) Existe un conjunto numerable de autovalores
1
2
. . .
n
. . .
correspondientes a autofunciones v
1
(x), v
2
(x), . . . v
n
(x), . . ., que satisfacen L[v
n
(x)] =
(x)v
n
(x) y son ortogonales con respecto al producto interno:
(v
i
, v
j
) =
_
b
a
(x) v
i
(x)v
j
(x)dx = 0 si i ,= j.
Para las condiciones de contorno locales (III.1.5),
i
,=
j
si i ,= j, ya que no pueden
existir dos soluciones linealmente independientes de L[u] = u para un mismo que
satisfagan ambas condiciones (pues, de ser as, el wronskiano sera nulo).
2) Cualquier funci on u(x) denida en el intervalo [a, b] que pertenezca al dominio del
operador puede escribirse en t erminos de las autofunciones v
n
(x) por medio de una serie
absoluta y uniformemente convergente en este intervalo
u(x) =
n=1
c
n
v
n
(x). (III.1.23)
El conjunto de todas las autofunciones forma, pues, una base del espacio vectorial de
funciones derivables a segundo orden que satisfacen las condiciones de contorno en el in-
tervalo [a, b]. Se dice, entonces, que las autofunciones de L forman un conjunto completo.
Un desarrollo como (III.1.23) suele llamarse un desarrollo de Fourier generalizado, pues
110
III.1 EL PROBLEMA DE STURM-LIOUVILLE
es una generalizaci on del desarrollo en serie de Fourier propiamente dicho, que estudia-
remos en el captulo IV.
Consecuencias:
a) Suponiendo v alido el desarrollo (III.1.23), es f acil mostrar que los coecientes c
n
est an dados por
c
n
=
_
b
a
(x)v
n
(x)u(x)dx
_
b
a
(x)v
2
n
(x)dx
=
(v
n
, u)
(v
n
, v
n
)
. (III.1.24)
En efecto, multiplicando (III.1.23) por (x)v
n
(x) e integrando, encontramos, debido
a la ortogonalidad de las autofunciones,
_
b
a
(x)v
n
(x)u(x)dx =
m=1
c
m
_
b
a
(x)v
m
(x)v
n
(x)dx
= c
n
_
b
a
(x)v
2
n
(x)dx,
obteni endose (III.1.24). Queda tambi en claro que, para una dada u, los coecientes del
desarrollo son unicos. (Si
n=1
c
n
v
n
(x) = 0 c
n
= 0 n).
b) Base ortonormal: Como hemos dicho, cada autofunci on v
n
(x) est a denida a me-
nos de una constante multiplicativa. Resulta c omodo elegir esas constantes de modo de
obtener una base en que las autofunciones (que llamaremos w
n
(x)) est en normalizadas,
es decir, (w
n
, w
n
)
=
_
b
a
(x)w
2
n
(x)dx = 1 n, de modo que
(w
m
, w
n
)
=
_
b
a
(x)w
m
(x)w
n
(x)dx =
mn
.
En tal caso,
c
n
=
_
b
a
(x)w
n
(x)u(x)dx = (w
n
, u)
.
c) En una base ortonormal, el cuadrado de la norma de u, denida por
[[u[[ = (u, u)
1/2
=
__
b
a
(x)u
2
(x)dx
_
1/2
,
puede expresarse como
[[u[[
2
=
n,m=1
c
n
c
m
_
b
a
(x)w
n
(x)w
m
(x)dx
=
n=1
c
2
n
. (III.1.25)
111
III.1 EL PROBLEMA DE STURM-LIOUVILLE
La igualdad anterior se denomina identidad de Parseval y constituye la generaliza-
ci on del teorema de Pit agoras. Es v alida para cualquier conjunto completo de funciones
ortonormales w
i
(x), i = 1, 2, . . .. Si el conjunto es incompleto, obtenemos en cambio
[[u[[
2
n=1
c
2
n
.
d) Dada la suma nita
S
m
(x) =
m
n=1
b
n
w
n
(x),
donde las autofunciones w
n
(x) son ortonormales, el error cuadr atico medio, denido por
2
m
[[u(x) S
m
(x)[[
2
=
_
b
a
(x)[u(x) S
m
(x)]
2
dx,
es mnimo para b
n
= c
n
=
_
b
a
(x)w
n
(x)u(x). En efecto,
2
m
=
_
b
a
[u
2
2
m
n=1
b
n
w
n
u +
m
n,n
=1
b
n
b
n
w
n
w
n
]dx
= [[u[[
2
+
m
n=1
[b
2
n
2b
n
c
n
] = [[u[[
2
n=1
c
2
n
+
m
n=1
(c
n
b
n
)
2
,
obteni endose el mnimo valor para b
n
= c
n
.
La mejor aproximaci on a u(x) por medio de una suma nita se obtiene, pues, pa-
ra b
n
= c
n
, si denimos como mejor aquella suma que minimiza el error promedio
anterior.
La ecuaci on anterior tambi en muestra que (para b
n
= c
n
),
m
n=1
c
2
n
= [[u[[
2
2
m
[[u[[
2
, m, indicando entonces que
n=0
c
2
n
es una serie convergente.
III.1.6. Desarrollo de la funci on de Green en autofunciones. Tipos de
convergencia
La propiedad 2) (ecuaci on (III.1.23)) requiere, para que el desarrollo en autofunciones
converja absoluta y uniformemente, que la funci on a desarrollar admita derivada segunda
y satisfaga las condiciones de contorno. Ciertamente, este no es el caso para la funci on
de Green, cuya derivada primera es discontinua. Sin embargo, puede mostrarse que existe
para ella un desarrollo de la forma
G(x, x
) =
n
w
n
(x)w
n
(x
n
,
que converge a G(x, x
) d ebilmente (en el sentido de las distribuciones). Esta claro que
tal desarrollo s olo tiene sentido en ausencia de modos cero, en cuyo caso se dice que
el operador de Sturm-Liouville es invertible y, a veces, que es no singular (n otese que
112
III.1 EL PROBLEMA DE STURM-LIOUVILLE
el t ermino se utiliza, en este caso, con un sentido totalmente distinto del que venimos
adoptando).
Consideremos ahora la ecuaci on general inhomog enea
L[u] = (x) f(x), (III.1.26)
donde (x) es una funci on continua y positiva (la funci on de peso previamente introduci-
da) y u debe satisfacer alguna de las condiciones de contorno mencionadas. Suponiendo
que podemos desarrollar, tanto u como f, en autofunciones normalizadas w
n
(x), con
L[w
n
(x)] =
n
(x)w
n
(x), es decir,
u(x) =
n=1
c
n
w
n
(x), c
n
=
_
b
a
(x)w
n
(x)u(x)dx (III.1.27)
f(x) =
n=1
f
n
w
n
(x), f
n
=
_
b
a
(x)w
n
(x)f(x)dx, (III.1.28)
se obtiene, al reemplazar en (III.1.26),
n=0
(c
n
n
f
n
)(x)w
n
(x) = 0,
de donde, suponiendo que
n
,= 0,
c
n
= f
n
/
n
.
Se puede llegar al mismo resultado directamente multiplicando la ecuaci on (III.1.26) por
w
n
(x) e integrando:
_
b
a
w
n
(x)L[u(x)]dx =
_
b
a
(x)w
n
(x)f(x)dx,
de donde, teniendo en cuenta el car acter autoadjunto de L, se obtiene la relaci on
n
c
n
= f
n
.
Podemos, entonces, escribir la soluci on como
u(x) =
n=1
f
n
w
n
(x)
n
=
_
b
a
G(x, x
)(x
)f(x
)dx
,
donde
G(x, x
) =
n=1
w
n
(x)w
n
(x
n
. (III.1.29)
113
III.1 EL PROBLEMA DE STURM-LIOUVILLE
Esta expresi on constituye el desarrollo en autofunciones de la funci on de Green G(x, x
).
Es muy util y ser a utilizado y discutido m as adelante. Notemos que tal desarrollo tiene
sentido si y s olo si no existe ning un autovalor nulo, en acuerdo con discusiones previas.
Es preciso destacar, no obstante, que la convergencia de este tipo de desarrollos es
m as d ebil que la convergencia puntual. Sea S
m
(x) =
m
n=1
c
n
w
n
(x).
Se dice que S
m
(x) converge puntualmente a u(x) para m si lm
m
S
m
(x) = u(x)
x [a, b].
Se dice, en cambio, que S
m
(x) converge en media a u(x) si
lm
m
[[u(x) S
m
(x)[[
2
= 0,
donde [[F[[
2
=
_
b
a
(x)F
2
(x)dx. La convergencia puntual asegura la convergencia en
media, pero la ultima no asegura la primera (ya que, por ejemplo, S
m
(x) puede diferir
de u(x) en un n umero nito de puntos sin que esto afecte a la integral). Esto ocurre, por
ejemplo, con el desarrollo en autofunciones de funciones u(x) continuas a trozos.
Finalmente, se dice que S
m
(x) converge a u(x) como distribuci on (convergencia
d ebil) si
lm
m
_
b
a
S
m
(x)(x)dx =
_
b
a
u(x)(x)dx
para cualquier funci on de prueba (x) en [a, b]. Esta ultima condici on es mucho m as d ebil
que las anteriores, ya que ni siquiera requiere que la serie
n=1
c
n
w
n
(x) sea convergente.
Por ejemplo, si (xx
)/(x) =
n=1
c
n
u
n
(x) c
n
=
_
b
a
w
n
(x)(xx
)dx = w
n
(x
),
de modo que
(x x
) = (x)
n=1
w
n
(x)w
n
(x
) , (III.1.30)
donde la igualdad s olo indica igualdad como distribuci on. La serie de la derecha, de he-
cho, no converge, pues lm
n
w
n
(x)w
n
(x
) ,= 0. Sin embargo, si (x) =
n=1
a
n
w
n
(x),
con a
n
= (w
n
, )
,
_
b
a
n=1
(x)w
n
(x)w
n
(x
)(x)dx =
n=1
a
n
w
n
(x
) = (x
), de
modo que la serie converge como distribuci on a (x x
).
Puede verse entonces, a partir de (III.1.29), que
L[G(x, x
)] =
n=0
(x)w
n
(x)w
n
(x
) = (x x
).
Por lo tanto, G(x, x
) tambi en puede obtenerse resolviendo directamente (III.1.26) para
f(x) = (x x
).
III.1.7. Problema variacional asociado y completitud
El problema de valores propios de L est a asociado a un problema variacional.
Para u ,= 0 y derivable, denimos la funcional
114
III.1 EL PROBLEMA DE STURM-LIOUVILLE
H[u] =
E[u]
[[u[[
2
=
_
b
a
[p(x)u
2
(x) + q(x)u
2
(x)]dx
_
b
a
(x)u
2
(x)dx
, (III.1.31)
que satisface H[u] = H[u] si ,= 0 siendo, por lo tanto, independiente de la norma de
u. Veremos luego que H[u] puede interpretarse como una energa. Notemos que H[u] 0
si q(x) 0.
Podemos preguntarnos ahora cu al de todas las funciones u(x) con derivada segunda,
que satisfacen alguna de las condiciones de contorno ya mencionadas, es la que minimiza
H(u), y cu al es el valor mnimo de H[u] entre estas funciones.
Suponiendo que tal funci on existe, y llam andola v, con H[v] = , debe cumplirse
H[v +v] H[v] =
funci on v que satisface la condici on de contorno.
Considerando ahora v peque no, y conservando t erminos s olo hasta orden v, obte-
nemos
H[v + v] H[v] 2[[v[[
2
_
b
a
[pv
(v)
+ (q )vv]dx
= 2[[v[[
2
_
b
a
[L[v] v](v)dx + [pv
v]
b
a
, (III.1.32)
donde hemos integrado por partes el primer t ermino (
_
b
a
pv
(v)
dx = pv
v[
b
a
_
b
a
(pv
vdx).
Por lo tanto, si H[v] es mnimo, la ecuaci on (III.1.32) debe anularse para cualquier
variaci on v(x) que satisfaga la condici on de contorno.
Consideremos, primero, la condici on de contorno de Dirichlet u(a) = u(b) = 0. En
este caso, v(a) = v(b) = 0 y el ultimo t ermino en (III.1.32) se anula, lo que implica
L[v(x)] (x)v(x) = 0, (III.1.33)
es decir, v(x) debe ser autofunci on de L con autovalor .
Es claro, entonces, que dicha autofunci on debe ser aqu ella con el autovalor m as bajo,
de modo que v(x) v
1
(x) y =
1
.
Notemos que, integrando por partes,
_
b
a
pu
2
dx = pu
u[
b
a
_
b
a
(pu
udx, por lo que
H[u] =
_
b
a
u(x)L[u(x)]dx
[[u[[
2
si pu
u[
b
a
= 0. (III.1.34)
Por lo tanto, si u(x) = v
n
(x), con L[v
n
] = v
n
y v
n
(a) = v
n
(b) = 0,
115
III.1 EL PROBLEMA DE STURM-LIOUVILLE
H[v
n
] =
n
de modo que v = v
1
, con H[v
1
] =
1
. Si q(x) 0
1
0.
El problema anterior es equivalente a la minimizaci on de E[u] con la condici on adi-
cional [[u[[ = 1 lo que, a su vez, es equivalente a la minimizaci on de
F[u] = E[u] [[u[[
2
,
donde es un multiplicador de Lagrange. La condici on estacionaria F[v +v] = F[v] +
O(v)
2
para v peque no conduce nuevamente a la ecuaci on L[v(x)] = (x)v(x), por lo
que v debe ser autofunci on de L y el autovalor correspondiente. En estas condiciones,
E[v
1
] =
1
[[v
1
[[.
Para las condiciones de Neumann (u
(a) = u
(b) = 0), puede procederse en forma
similar. S olo cabe aclarar que, en este caso, no es necesario imponer la condici on de con-
torno. La condici on u
(a) = u
(b) = 0 surge naturalmente al buscar el mnimo absoluto
de H[u], para anular el ultimo t ermino en (III.1.32) que aparece al integrar por partes. El
primer autovalor correspondiente al problema de Neumann es, pues, menor que el corres-
pondientes al problema de Dirichlet:
N
1
D
1
.
Consideremos ahora el subespacio S
1
de funciones u que satisfagan la condici on de
contorno y que sean ortogonales a la primera autofunci on v
1
(x), es decir,
(u, v
1
)
=
_
b
a
(x)v
1
(x)u(x)dx = 0.
Puede demostrarse, siguiendo un procedimiento similar, que el valor mnimo de H[u]
para u S
1
se obtiene para una funci on v que debe satisfacer tambi en la ecuaci on
(III.1.33) con la correspondiente condici on de contorno, pero que debe ser, obviamen-
te, ortogonal a v
1
. Esta funci on debe, pues, ser proporcional a la autofunci on de L con el
segundo autovalor
2
. Es decir, v v
2
, con = H[v
2
] =
2
1
.
Procediendo en forma an aloga, puede probarse que el mnimo de H[u] en el subes-
pacio S
n1
formado por funciones ortogonales a v
1
, v
2
, . . . , v
n1
, n 2, se obtiene para
v v
n
, siendo el valor mnimo H[v
n
] =
n
. De esta forma puede construirse todo el
conjunto de autovalores y autofunciones mediante un procedimiento variacional. Puede
probarse tambi en que
N
n
D
n
n.
El procedimiento anterior permite probar tambi en la completitud del conjunto de au-
tofunciones. Daremos a continuaci on un bosquejo de la demostraci on, suponiendo que
n
para n (v eanse los siguientes ejemplos).
Sea u(x) una funci on de norma nita que satisface la condici on de contorno y consi-
deremos el resto
R
m
(x) = u(x) S
m
(x), (III.1.35)
con
116
III.1 EL PROBLEMA DE STURM-LIOUVILLE
S
m
(x) =
m
n=1
c
n
v
n
(x), c
n
= (v
n
, u)
y (v
n
, v
n
)
= 1 (autofunciones normalizadas). Tenemos
(v
n
, R
m
)
= 0, n = 1, . . . , m.
Por lo tanto, H[R
m
(x)]
m
, pues R
m
(x) es ortogonal a v
1
, . . . , v
m
. Adem as, utili-
zando (III.1.34) y, dado que
_
b
a
R
m
(x)L[S
m
(x)]dx = 0, se obtiene
H[R
m
(x)] =
[[u[[
2
H[u]
m
n=1
m
c
2
m
[[R
m
(x)[[
2
m
de donde, si
m
0 (como ocurre para q(x) 0),
[[R
m
(x)[[
2
[[u[[
2
H[u]
m
.
Por lo tanto,
lm
m
[[R
m
(x)[[
2
= 0
si
m
, lo que asegura la convergencia en media (pero no la convergencia puntual).
Aproximaciones variacionales. La formulaci on variacional del problema de autova-
lores de Sturm-Liouville permite desarrollar aproximaciones variacionales en las que
u(x) se aproxima por una cierta funci on que satisface las condiciones de contorno y que
contiene algunos par ametros libres. Estos se optimizan minimizando H[u], logr andose
as una cota superior a
1
(y, en general, a
n
, si imponemos que u(x) sea ortogonal a
v
1
, . . . , v
n1
).
Ejemplo III.1.5:
Consideremos L =
d
2
dx
2
en [0, b], con u(0) = u(b) = 0.
La ecuaci on L[v] = v, es decir,
d
2
v
dx
2
= v
no admite autofunciones con = 0 ya que, en este caso, la soluci on general es v = ax+b
y las condiciones de contorno exigen que se cumpla a = b = 0. Tal soluci on, id entica-
mente nula, no es, por denici on, una autofunci on. Dicho de otro modo, el problema de
Dirichlet homog eneo no admite modos cero. Para ,= 0, la ecuaci on diferencial posee la
soluci on general v(x) = Ce
i
x
+ De
i
x
, que puede escribirse como
v(x) = Asin(
x) + Bcos(
x).
117
III.1 EL PROBLEMA DE STURM-LIOUVILLE
Las condiciones de contorno implican B = 0, y sin(
b) = 0, por lo que
b = n,
n Z. Es f acil vericar que, de las autofunciones resultantes, s olo las correspondientes a
n = 1, 2, . . . son linealmente independientes. Es decir, los autovalores est an dados por
n
=
n
2
2
b
2
, n = 1, 2, . . . (III.1.36)
Las correspondientes autofunciones son
v
n
(x) = A
n
sin(nx/b) n = 1, 2, . . . , (III.1.37)
con A
n
,= 0, y puede vericarse que
_
b
0
v
n
(x)v
m
(x)dx =
nm
A
2
n
b/2.
Las autofunciones normalizadas corresponden, pues, a A
n
=
_
2/b.
Para funciones que se anulan en los extremos, el valor mnimo de
H[u] =
_
b
0
u
2
(x)dx
_
b
0
u
2
(x)dx
=
_
b
0
u(x)u
(x)dx
_
b
0
u
2
(x)dx
es, entonces,
1
=
2
/b
2
9,87/b
2
y corresponde a v
1
(x) = A
1
sin(x/b).
Problema sugerido III.1.1: Mostrar que, planteando como aproximaci on variacional
una par abola u(x) = x(b x) que satisface u(0) = u(b) = 0, se obtiene H[u] = 10/b
2
>
1
(esto corresponde a reemplazar por
10, que es una aproximaci on utilizada en la
antig uedad y es cota superior de ).
Es importante destacar que este ejemplo corresponde exactamente al problema cu anti-
co no relativista de una partcula en una dimensi on, connada al intervalo [0, b], libre den-
tro de este intervalo. La funci on v(x), con [[v[[
2
= 1, representa, en este caso, la funci on
de onda de la partcula, y la ecuaci on L[v] = v es la ecuaci on de Schr odinger inde-
pendiente del tiempo, con E
n
=
2
n
/(2m) la energa del estado n. Adem as,
2
2m
H[u]
representa aqu el valor medio de la energa correspondiente a la funci on de onda u(x), el
cual es mnimo para u(x) = v
1
(x).
Ejemplo III.1.6: Consideremos, nuevamente, L =
d
2
dx
2
en [0, b] con las condiciones de
contorno de Neumann u
(0) = u
(b) = 0. En este caso, los autovalores son
n
=
n
2
2
b
2
, n = 0, 1, 2, . . . (III.1.38)
118
III.1 EL PROBLEMA DE STURM-LIOUVILLE
con autofunciones
v
n
(x) = B
n
cos(nx/b) . (III.1.39)
Los autovalores son los mismos que en el caso anterior, pero aparece el autovalor
adicional
0
= 0, en cuyo caso v
0
= B
0
, constante, que s satisface las condiciones de
contorno. Se cumple
_
b
0
v
n
(x)v
m
(x)dx =
nm
B
2
n
b n=0
b/2 n>0
. (III.1.40)
Las autofunciones normalizadas se obtienen para B
0
= 1/
b, B
n
=
_
2/b, n =
1, 2, . . ..
El valor mnimo de H[u] para esta condici on de contorno es
0
= 0 (Aqu hemos
llamado, por conveniencia,
0
al autovalor m as bajo de L).
Ejemplo III.1.7: Nuevamente L =
d
2
dx
2
con las condiciones mixtas u(0) = 0, u
(b) = 0.
Como el problema de Dirichlet, tampoco este problema mixto admite modos cero. Para
,= 0, las presentes condiciones de contorno implican B = 0 y cos(
b) = 0, es decir,
n
= (n + 1/2)
2
2
/b
2
, n = 0, 1, 2, . . . , (III.1.41)
que son distintos a los hallados en los ejemplos anteriores, con autofunciones
v
n
(x) = A
n
sin[(n + 1/2)x/b] . (III.1.42)
Se cumple
_
b
0
v
n
(x)v
m
(x)dx =
nm
A
2
n
b/2,
y las autofunciones normalizadas se obtienen para A
n
=
_
2/b.
El valor mnimo de H[u] es
1
=
2
/4b
2
, intermedio entre el mnimo obtenido con
las condiciones de Neumann y aqu el obtenido con las de Dirichlet.
Ejemplo III.1.8: Nuevamente L =
d
2
dx
2
con las condiciones de contorno peri odicas
u(b) = u(b), u
(b) = u
(b). Obtenemos las autofunciones
v
0
= B
0
, v
n
(x) = B
n
cos(nx/b), u
n
(x) = A
n
sin(nx/b), (III.1.43)
con n = 1, 2, . . . correspondientes a los autovalores
119
III.1 EL PROBLEMA DE STURM-LIOUVILLE
0
= 0,
n
= n
2
2
/b
2
, n = 1, 2, . . . . (III.1.44)
Para n 1 existen, pues, 2 autofunciones (v
n
(x) y u
n
(x)) por cada autovalor.
Se cumple
_
b
b
v
n
(x)v
m
(x)dx =
nm
B
2
n
2b n=0
b n>0
,
_
b
b
u
n
(x)u
m
(x)dx =
nm
A
2
n
b,
_
b
b
u
n
(x)v
m
(x)dx = 0 , ,
obteni endose las autofunciones normalizadas para B
0
= 1/
2b, B
n
= A
n
= 1/
b.
En este caso resulta m as c omodo utilizar una base compleja de autofunciones, dada
por
z
n
(x) = C
n
e
inx/b
= C
n
[cos(nx/b) +i sin(nx/b)], n = 0, 1, 2, . . . ,
que es ortogonal con respecto al producto interno (u, v) =
_
b
b
u
(x)v(x)dx:
_
b
b
z
n
(x)z
m
(x)dx =
nm
[C
2
n
[2b.
120
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
sen[n x]
0.2 0.4 0.6 0.8 1.0
x
1.5
1.0
0.5
0.0
0.5
1.0
1.5
v
n
x
cos[n x]
0.2 0.4 0.6 0.8 1.0
x
1.5
1.0
0.5
0.0
0.5
1.0
1.5
v
n
x
sen[(n1f2) x]
0.2 0.4 0.6 0.8 1.0
x
1.5
1.0
0.5
0.0
0.5
1.0
1.5
v
n
x
cos[n x]
sen[nx]
1.0 0.5 0.5 1.0
x
1.5
1.0
0.5
0.5
1.0
1.5
v
n
x
Figura 16: Gr acas de las primeras tres autofunciones de los cuatro ejemplos anteriores
para b = 1.
III.2. Resoluci on de ecuaciones lineales homog eneas me-
diante series de potencias. Funciones Especiales
El formalismo basado en la funci on de Green, visto ateriormente, permite resolver
la ecuaci on inhomog enea L[u] = f conociendo la soluci on general de la ecuaci on ho-
mog enea L[u] = 0. No hemos dicho, sin embargo, c omo resolver en general esta ultima
ecuaci on, cuando las funciones p(x), q(x) (o equivalentemente, A(x), B(x)) no son cons-
tantes. Esta es una cuesti on importante y de gran inter es pr actico, dado que algunas de las
soluciones de este tipo de ecuaciones aparecen con frecuencia en aplicaciones a la Fsica.
Ese es el caso de las llamadas funciones especiales. A continuaci on discutiremos c omo
encontrar la soluci on general de la ecuaci on homog enea en el caso de coecientes de-
pendientes de la variable, presentando luego algunas de las funciones especiales como
ejemplos.
III.2.1. Caso de coecientes analticos
Consideremos la ecuaci on general lineal de segundo orden
u
+ A(x)u
+ B(x)u = 0. (III.2.1)
121
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Teorema III.2.1 Si A(x) y B(x) son analticas en un entorno de x = 0, es decir,
A(x) =
n=0
A
n
x
n
, B(x) =
n=0
B
n
x
n
, [x[ < R, (III.2.2)
las soluciones de (III.2.1) son analticas en ese entorno y pueden, pues, representarse
como una serie de potencias:
u(x) =
n=0
c
n
x
n
, [x[ < R. (III.2.3)
Demostraci on: Supondremos, primero, que existe una soluci on del tipo (III.2.3), y
probaremos que converge.
Dado que B(x)u(x) =
n=0
x
n
n
m=0
B
nm
c
m
, A(x)u
(x) =
n=0
x
n
n+1
m=0
A
nm+1
mc
m
,
reemplazando (III.2.3) en (III.2.1) se obtiene, luego de denir B
1
= 0,
n=0
x
n
[c
n+2
(n + 2)(n + 1) +
n+1
m=0
c
m
(mA
nm+1
+ B
nm
)] = 0 .
Por lo tanto, como el coeciente de x
n
debe ser nulo,
c
n+2
=
n+1
m=0
c
m
[mA
nm+1
+B
nm
]
(n + 2)(n + 1)
, n 0 , (III.2.4)
donde el segundo miembro depende de los coecientes previos c
0
, . . . , c
n+1
. Se obtiene
as una relaci on recursiva que determina todos los coecientes c
n
para n 2 a partir de
los dos primeros c
0
, c
1
. Por ejemplo,
c
2
=
A
0
c
1
+ B
0
c
0
2
c
3
=
A
1
c
1
+ 2A
0
c
2
+ B
1
c
0
+ B
0
c
1
6
=
c
0
(B
1
A
0
B
0
) + c
1
(A
1
+ B
0
A
2
0
)
6
. (III.2.5)
Demostraremos ahora que esta serie converge para [x[ < R. Sea t tal que 0 [x[ < t <
R. Como lm
n
A
n
t
n
= lm
n
B
n
t
n
= 0 (condici on necesaria de convergencia de las
series (III.2.2)), M > 0 tal que
[B
n
[ M/t
n
, [A
n
[ M/t
n1
,
n.
Por lo tanto,
[c
n+2
[
M
n+1
m=0
[c
m
[t
m
(m+ 1)
t
n
(n + 2)(n + 1)
.
122
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Deniendo recursivamente los coecientes no negativos
d
n+2
=
M
n+1
m=0
d
m
t
m
(m + 1)
t
n
(n + 2)(n + 1)
,
con d
0
= [c
0
[, d
1
= [c
1
[, tenemos [c
n
[ d
n
n. Adem as,
d
n+2
= d
n+1
_
n
t(n + 2)
+
Mt(n + 2)
(n + 2)(n + 1)
_
,
por lo que
lm
n
d
n+2
[x[
n+2
d
n+1
[x[
n+1
=
[x[
t
< 1 ,
lo que implica, por el criterio del cociente, que
n=0
d
n
x
n
converge absolutamente si
[x[ < t, es decir, [x[ < R. Esto implica, a su vez, que
n=0
c
n
x
n
converge absoluta-
mente para [x[ < R.
La soluci on general puede, por lo tanto, escribirse como
u(x) = c
0
u
1
(x) + c
1
u
2
(x) ,
con u
1
la soluci on para c
0
= 1, c
1
= 0 y u
2
aqu ella para c
0
= 0, c
1
= 1:
u
1
(x) = 1
B
0
2
x
2
B
1
A
0
B
0
6
x
3
+ . . . ,
u
2
(x) = x
A
0
2
x
2
A
1
+ B
0
A
2
0
6
x
3
+ . . .
Obviamente, las mismas consideraciones rigen si los coecientes son analticos en un
entorno de un punto x
0
, en cuyo caso A(x), B(x) y u(x) pueden expresarse como series
de potencias de (x x
0
) en ese entorno.
Ejemplo III.2.1:
u
k
2
u = 0
La soluci on general es u(x) = e
kx
+e
kx
= a
0
cosh(kx)+a
1
sinh(kx), con a
0,1
=
. Podemos obtenerla con el m etodo anterior (para A(x) = 0, B(x) = k
2
), planteando
la serie (III.2.3). Se obtiene
n=0
x
n
[c
n+2
(n + 2)(n + 1) k
2
c
n
] = 0 ,
de donde
c
n+2
=
k
2
c
n
(n + 2)(n + 1)
= c
n
k
n+2
n!
k
n
(n + 2)!
, n 0 . (III.2.6)
123
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Para c
0
= 1, c
1
= 0, la relaci on recursiva se satisface si
c
n
=
k
n
n!
, n par, c
n
= 0, n impar ,
que conduce a u
1
(x) = cosh(kx), y si c
1
= 1, c
0
= 0,
c
n
=
k
n
n!
, n impar, c
n
= 0, n par .
Esto permite obtener u
2
(x) = sinh(kx). El teorema anterior implica la convergencia de
estas series x .
III.2.2. Desarrollo alrededor de puntos singulares regulares
Analizaremos, ahora, el caso en que los coecientes de la ecuaci on diferencial de
segundo orden no son analticos en el punto alrededor del cual se propone un desarrollo en
serie para las soluciones pero satisfacen, en ese punto, condiciones menos restrictivas, que
detallaremos en las hip otesis del teorema que sigue. Si esas condiciones se cumplen, se
dice que el problema de Sturm-Liouville tiene, en dicho punto, un punto singular regular.
Teorema III.2.2 (Teorema de Frobenius-Fuchs): Dada la ecuaci on diferencial u
+A(x)u
+
B(x)u = 0, si A(x) posee, a lo sumo, un polo simple en x = 0 y B(x), a lo sumo, un polo
de orden 2 en x = 0, de modo que para 0 < [x[ < R se cumple
A(x) =
n=1
A
n
x
n
=
A
1
x
+ A
0
+ . . . ,
B(x) =
n=2
B
n
x
n
=
B
2
x
2
+
B
1
x
+ . . . ,
entonces una de las soluciones linealmente independientes de la ecuaci on (III.2.1) tiene
la forma, para 0 < [x[ < R, de una serie generalizada de potencias
u
1
(x) =
n=0
a
n
x
n+s
= x
s
n=0
a
n
x
n
, (III.2.7)
donde a
0
,= 0 y s es una de las races de la ecuaci on indicial
s(s 1) + A
1
s + B
2
= 0 , (III.2.8)
o sea,
s =
1 A
1
r
2
, r =
_
(1 A
1
)
2
4B
2
. (III.2.9)
124
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Si la diferencia r entre las dos races de esta ecuaci on no es entera, entonces la segunda
soluci on de (III.2.1) es tambi en una serie generalizada de potencias, con s la otra raz de
(III.2.9). En cambio, si r es entero, la segunda soluci on tiene la forma
u
2
(x) = Cu
1
(x) ln x + x
s
n=0
b
n
x
n
, (III.2.10)
donde C es una constante (que puede ser 0) y s
es la otra raz de (III.2.9), con Re[s
]
Re[s]. Si r = 0 (s = s
), entonces C ,= 0.
La necesidad de una serie generalizada de potencias puede comprenderse analizando
el comportamiento de la soluci on para x 0. Conservando s olo los t erminos de mayor
orden en este lmite, la ecuaci on (III.2.1) se reduce a
u
+
A
1
x
u
+
B
2
x
2
u = 0 , (III.2.11)
que es una ecuaci on de Euler, con soluciones u(x) = cx
s
(y tambi en x
s
ln x para races
multiples). Reemplazando esta soluci on en (III.2.11) obtenemos
cx
s
[s(s 1) + A
1
s + B
2
] = 0
que conduce, precisamente, a la ecuaci on indicial (III.2.8). Si las dos races de (III.2.9)
son distintas, las soluciones de (III.2.1) deben ser, pues, de la forma cx
s
para x cercano
al origen. Si las races son iguales, la segunda soluci on linealmente independiente de
(III.2.11) es x
s
ln x, por lo que la segunda soluci on de (III.2.1) debe ser de esta forma
para x 0.
La ecuaci on indicial surge, de todos modos, al reemplazar (III.2.7) en (III.2.1). Ha-
ciendo esto btenemos
n=0
x
s+n2
[a
n
(n+s)(n+s1)+
n
m=0
a
m
(A
nm1
(m+s)+B
nm2
)] = 0 .
La anulaci on del coeciente de x
s2
(n = 0) implica
a
0
[s(s 1) + A
1
s + B
2
] = 0
que conduce a la ecuaci on indicial (III.2.8) al ser a
0
,= 0. Luego, la anulaci on del coe-
ciente de x
n+s2
para n 1 nos permite obtener la relaci on recursiva
a
n
=
n1
m=0
a
m
(A
nm1
(m + s) + B
nm2
)
(n + s)(n + s 1) + A
1
(n + s) + B
2
=
n1
m=0
a
m
(A
nm1
(m + s) + B
nm2
)
n(n + 2s + A
1
1)
, n 1,
donde el segundo miembro depende de a
0
, . . . , a
n1
. Como n + 2s + A
1
1 = n r,
esto es v alido si n r ,= 0, o sea, n r ,= 0. Los problemas con una soluci on del tipo
(III.2.7) pueden surgir, entonces, s olo cuando r es entero y, en esas condiciones, para la
raz menor s =
1A
1
r
2
, en cuyo caso la segunda soluci on es de la forma (III.2.10).
125
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Problema sugerido III.2.1: Muestre que el segundo t ermino del miembro derecho en
(III.2.10), w(x) = u
2
(x) Cu
1
(x) ln(x), satisface la ecuaci on no homog enea
w
+ A(x)w
+ B(x) = C[2
u
1
x
+ u
1
(
A(x)
x
1
x
2
)] (III.2.12)
y que la misma puede resolverse mediante el desarrollo en serie de potencias indicado
eligiendo C adecuadamente.
Ejemplo III.2.2: Consideraremos, en realidad, primero un contraejemplo:
u
+ u/x
4
= 0 . (III.2.13)
Esta ecuaci on no es de la forma contemplada en el teorema III.2.2, pues B(x) posee un
polo de orden 4. Puede vericarse que la soluci on general de esta ecuaci on es
u(x) = x[c
1
cos(1/x) +c
2
sin(1/x)] ,
que no es de la forma (III.2.7) o (III.2.10), ya que posee una singularidad esencial en
x = 0.
Notemos, sin embargo, que la soluci on es de la forma (III.2.7) en z = 1/x (u(z) =
(c
1
cos z+c
2
sin z)/z). En esta variable, la ecuaci on (III.2.13) se convierte en u
+2u
/z+
u = 0, que es de la forma contemplada en el teorema III.2.2, y la ecuaci on indicial es
s(s 1) + 2s = 0, con races s = 1 y s = 0, en acuerdo con el desarrollo en serie de
u(z).
Veremos luego varios ejemplos muy importantes (Ecuaci on de Bessel, entre otros).
A continuaci on, utilizaremos tambi en este teorema para determinar el comportamien-
to en los bordes en problemas de Sturm-Liouville singulares.
III.2.3. Propiedades de las soluciones de los problemas de Sturm-
Liouville singulares
Los problemas de Sturm-Liouville para los cuales p(x) se anula en uno o m as puntos
del intervalo (conocidos como singulares) tienen como soluciones las llamadas funciones
especiales, de aparici on muy usual en Fsica. Tales soluciones tienen particularidades que
pueden resumirse como sigue:
Supongamos que
1. p(x) > 0 en (a, b),
2. p(x) = (x a)(x), con (a) > 0 y (x) analtica en un entorno de a (de modo
que p(x) tiene un cero simple en x = a).
126
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
3. q(x) tiene a lo sumo un polo simple en x = a, con residuo no negativo, de forma
que q(x) = (x)/(x a), con (a) 0 y (x) analtica en un entorno de a.
En esas condiciones, valen los tres lemas siguientes:
Lema III.2.3 Sean y
1
(x) e y
2
(x) dos soluciones linealmente independientes de la ecua-
ci on
L[y] =
d
dx
_
p(x)
dy
dx
_
+q(x) y = 0 , (III.2.14)
Si y
1
(x) tiene lmite nito para x a, entonces y
2
(x) es divergente en ese mismo
punto.
Demostraci on
Por la primera hip otesis, para x (a, b) la ecuaci on (III.2.14) equivale a
y
+
p
(x)
p(x)
y
q(x)
p(x)
y = 0 . (III.2.15)
Si p(x) tiene un cero simple en x = a, para x a tenemos p(x) = (x a)(a) +
O(x a)
2
y p
(x) = (x) + (x a)
(x) = (a) + O(x a).
Entonces p
(x)/p(x) =
1
xa
+ O(x a) para x a, por lo que el segundo t ermino en
(III.2.15) tiene un polo simple en x = a, con residuo 1.
Por otro lado, el tercer t ermino tendr a a lo sumo un polo de orden 2 en x = a, ya que
q(x)
p(x)
=
(x)
(x)(xa)
2
=
r
(xa)
2
+ O(
1
(xa)
) para x a, con r = (a)/(a) 0.
Entonces, alrededor de x = a podemos considerar el desarrollo en serie de potencias
generalizadas para las soluciones de (III.2.14). El comportamiento de estas para x a
estar a entonces completamente determinado por las races de la ecuaci on indicial, que
ser a
s(s 1) + 1 r = 0 . (III.2.16)
Por lo tanto,
s =
r, r 0 . (III.2.17)
Para x a, las soluciones correspondientes ser an, entonces, de la forma
y
1
(x) = (x a)
r
(1 +O(x a)), y
2
(x) = (x a)
r
(1 + O(x a)) (III.2.18)
si r > 0, e
y
1
(x) = 1 + O(x a), y
2
(x) = ln(x a)(1 + O(x a)) (III.2.19)
si r = 0 (Si 2
r es entero, y
2
(x) puede contener adem as un t ermino proporcional a
y
1
(x) ln(x a), que no afecta el t ermino dominante para x a).
127
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Vemos entonces que, si r > 0, y
1
(x) se anula como (x a)
r
para x a, mientras
que y
2
(x) diverge como (x a)
r
. En cambio, si r = 0, y
1
(x) tiende a una constante
no nula para x a, mientras que y
2
(x) tiene una divergencia logartmica. En todos los
casos, pues, y
1
(x) permanece acotada para x a, mientras que y
2
(x) diverge en este
lmite.
Esta demostraci on implica, adem as, el siguiente lema:
Lema III.2.4 En las condiciones del lema anterior, si y
1
(a) ,= 0, y
2
(x) tiene una singu-
laridad logartmica en x = a, mientras que si y
1
(x) tiene un cero de orden n en x = a,
y
2
(x) tiene un polo del mismo orden en ese punto.
Demostraci on
Es consecuencia inmediata de (III.2.18)(III.2.19).
Vemos, tambi en, la necesidad de que r sea no negativo ((a) 0) para la validez
de ambos lemas.
Si r < 0, s =
r = i
_
[r[ es imaginario. En este caso, las soluciones se compor-
tan para x a como (x a)
i
|r|
y (x a)
i
|r|
, es decir, como cos[
_
[r[ ln(x a)] y
sin[
_
[r[ ln(x a)] (recordar que x
i
= e
ilnx
= cos(ln x) + i sin(ln x)).
Por lo tanto, en este caso, ambas soluciones permanecen nitas! para x a si x es
real, aunque, por cierto, no son analticas en x = a. Para x a, estas funciones oscilan
r apidamente y sus derivadas divergen, como es f acil vericar.
Los dos lemas anteriores muestran que, si se tiene un problema de Sturm-Liouville que
se anula en alg un o algunos puntos del intervalo considerado (p(a) = 0), el problema a
resolver ser a, por ejemplo, Ly(x) = 0 en (a, b), cuya soluci on general es y(x) = Ay
1
(x)+
By
2
(x). Si se requiere que la soluci on tenga sentido fsico, en las condiciones del lema
deber an imponerse dos condiciones:
1. Condici on de acotaci on en el punto en que se anula p(x), i.e., [y(a)[ <
2. Condici on de contorno de tipo Robin en x = b. Si p(a) = p(b) = 0, se impone, en
ambos extremos, la condici on de acotaci on (como veremos, este es el caso para la
ecuaci on de Legendre).
Un tercer lema es el siguiente:
Lema III.2.5 En las condiciones de los lemas anteriores, la soluci on acotada en x = a
satisface
lm
xa
p(x)
d
dx
y
1
(x) = 0 .
En efecto, para x a. p(x)y
1
(x) se comporta como
p(x)y
1
(x) = (x a)(x a)
r1
(
r + O(x a)) = (x a)
r
(
r + O(x a)) ,
que tiende a 0 para x a, tanto para r > 0 como para r = 0.
128
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Por otro lado, si r < 0 no se cumple que p(x)y
(x) 0 para x a, como es f acil
vericar.
Los tres lemas anteriores permiten demostrar el siguiente teorema
Teorema III.2.6 El operador de Sturm-Liouville, con su dominio denido por la condi-
ci on de acotaci on en el punto donde se anula p(x) resulta autoadjunto.
Demostraci on
Sea p(x) tal que p(a) 0. Como en el caso en que p permanece no nulo en todo el
intervalo, los t erminos de borde restantes luego de integrar por partes son:
(u, Lv) (Lu, v) = u(x)p(x)
dv
dx
[
b
a
+ v(x)p(x)
du
dx
[
b
a
.
Las contribuciones de borde en x = b se anulan del modo usual, debido a las condi-
ciones de contorno de Robin homog eneas. Las contribuciones en x = a se anulan como
consecuencia del ultimo lema. Eso demuestra el car acter autoadjunto.
Para terminar, se nalamos que, en estas condiciones, las propiedades espectrales que
hemos enunciado para el problema de Sturm-Liouville no singular (ver III.1.5)) siguen
siendo v alidas.
III.2.4. Motivaci on del estudio de funciones especiales: problema de
autovalores para el operador laplaciano en una bola tridi-
mensional
En muchos problemas de inter es fsico es necesario encontrar la soluci on de la ecua-
ci on
u = u,
donde es el operador de Laplace, en una regi on con simetra esf erica. Esta ecuaci on,
escrita en coordenadas esf ericas se reduce a
1
r
r
_
r
2
u
r
_
+
1
r
2
sin
_
sin
u
_
+
1
r
2
sin
2
2
u
2
+ u = 0 , (III.2.20)
con 0 r r
0
, 0 2 y 0 .
2
2
La regi on en que hemos denido nuestro problema se denomina la bola tridimensional (B
3
) de radio
r
0
. Su borde es la esfera bidimensional del mismo radio. Por abuso de lenguaje, suele llamarse a nuestra
regi on de inter es la esfera s olida de radio r
0
y a su borde, la supercie esf erica de igual radio.
129
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
La ecuaci on anterior puede resolverse utilizando el llamado m etodo de separaci on
de variables. Dicho m etodo consiste en proponer, para la soluci on, una dependencia de la
forma u(r, , ) = R(r)Y (, ) (producto de funciones de una unica variable). La validez
de este m etodo ser a probada en la secci on V.6. Hasta entonces, lo aplicaremos dando por
cierta su validez. Reemplazando este Ansatz en (III.2.20), se tiene
1
R(r)
d
dr
_
r
2
dR(r)
dr
_
+ r
2
R(r) =
1
Y (, )
,
Y (, ) , (III.2.21)
donde
,
=
1
r
2
sin
_
sin
_
+
1
r
2
sin
2
2
. (III.2.22)
En la ecuaci on (III.2.21), el miembro izquierdo s olo depende de la variable r, mientras
el miembro derecho s olo depende de las variables angulares. Para que la igualdad sea
v alida para todos los valores de las variables es, entonces, necesario que ambos miembros
sean constantes. Llamaremos a esa constante ( + 1).
III.2.5. Ecuaci on de Legendre
Empecemos por analizar la ecuaci on resultante para la parte angular, es decir,
,
Y (, ) + ( + 1)Y (, ) = 0 . (III.2.23)
Supongamos, en primer lugar, que el problema a tratar tiene simetra azimutal, es
decir, Y (, ) = Y (), independiente de . En ese caso, la ecuaci on (III.2.23) se reduce
a
1
sin
_
sin
Y ()
_
+ ( + 1)Y () = 0 ,
con 0 .
El cambio de variable x = cos
_
1
sin()
x
_
nos conduce, llamando Y () =
u(x), a la ecuaci on
(1 x
2
)u
2xu
+( + 1)u = 0, con 1 x 1 . (III.2.24)
Esta ultima ecuaci on puede escribirse, tambi en, en la forma de Sturm-Liouville
[(1 x
2
)u
+ ( + 1)u = 0 . (III.2.25)
N otese que, en este caso, p(x) se anula en ambos extremos del intervalo de varia-
ci on de la variable x y, de acuerdo con lo estudiado anteriormente, debemos imponer la
condici on de acotaci on de las soluciones en ambos (x = 1).
La ecuaci on de Sturm-Liouville a considerar corresponde a A(x) =
2x
1x
2
, B(x) =
(+1)
1x
2
, ambos analticos para [x[ < 1.
130
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Como ( + 1) = ( + 1/2)
2
1/4, es suciente considerar Re[] 1/2. Propo-
niendo para la soluci on un desarrollo en serie como el de la ecuaci on (III.2.3) se obtiene
n=0
x
n
c
n+2
(n + 2)(n + 1) c
n
[n(n 1) + 2n ( + 1)] = 0 ,
de donde
c
n+2
= c
n
n(n + 1) ( + 1)
(n + 2)(n + 1)
= c
n
(n + + 1)( n)
(n + 2)(n + 1)
.
Para c
1
= 0 y c
0
,= 0, se obtiene la soluci on par, para la cual c
2n+1
= 0 y
c
2
= c
0
( + 1)
2!
, c
4
= c
0
( 2)( + 1)( + 3)
4!
, . . .
mientras que para c
0
= 0 y c
1
,= 0, se obtiene la soluci on impar, en la cual c
2n
= 0 y
c
3
= c
0
( 1)( + 2)
3!
, c
5
= c
0
( 1)( 3)( + 2)( + 4)
5!
, . . .
Dado que [c
n+2
/c
n
[ 1 para n , el radio de convergencia de la serie resultante es 1.
Puede verse que la soluci on no es, en general, acotada para x (1, 1) ([u(x)[ en
al menos uno de los bordes). Pero, como ya hemos visto, buscamos soluciones acotadas en
ambos extremos. Y eso s olo ocurre si = l, con l entero positivo, en cuyo caso c
l+2
= 0.
Esto implica que la soluci on con la misma paridad de l se convierte en un polinomio de
grado l, que se denomina Polinomio de Legendre. En tal caso, los coecientes no nulos
del polinomio est an dados por
c
2n+i
= c
i
(1)
n
(l
2
!)
2
(l + 2n)!
l!(l
2
n)!(l
2
+ n)!(2n + i)!
, i = 0, 1, n = 0, . . . , l
2
,
donde l
2
= [l/2] ([ ] denota parte entera) e i = 0 corresponde a la soluci on par para
l par, i = 1 a la soluci on impar para l impar. Los polinomios de Legendre se denen
exactamente como la soluci on para los coecientes iniciales c
i
= (1)
l
2
l!/[(l
2
!)
2
2
li
],
i = 0, 1, y pueden por lo tanto escribirse como (llamando k = l
2
n)
P
l
(x) =
1
2
l
l
2
k=0
(1)
k
(2l 2k)!
k!(l k)!(l 2k)!
x
l2k
.
Dado que
(2l2k)!
(l2k)!
x
l2k
=
d
l
dx
l
x
2l2k
, y k!(l k)! = l!/(
l
k
), pueden reescribirse como
P
l
(x) =
1
2
l
l!
d
l
dx
l
l
k=0
(1)
k
(
l
k
)x
2l2k
=
1
2
l
l!
d
l
dx
l
(x
2
1)
l
(III.2.26)
131
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
(F ormula de Rodrigues). Algunos ejemplos son
P
0
(x) = 1 P
2
(x) =
1
2
(3x
2
1)
P
1
(x) = x P
3
(x) =
1
2
(5x
3
3x). (III.2.27)
Los Polinomios de Legendre satisfacen las relaciones
P
l
(1) = 1,
_
1
1
P
l
(x)P
l
(x)dx =
ll
2
2l + 1
,
lP
l
(x) = (2l 1)xP
l1
(x) (l 1)P
l2
(x), l 2.
Cabe destacar, entonces, que soluciones acotadas de la ecuaci on (III.2.24) para x
(1, 1) y 1/2 se obtienen unicamente cuando = l, entero, y, en ese caso, para
la soluci on con la misma paridad de l, la cual es un polinomio proporcional al Polino-
mio de Legendre (III.2.26). Por ejemplo, puede vericar el lector que, para = 0, un
par de soluciones linealmente independientes de (III.2.24) est a dado por P
0
(x) = 1 y
Q
0
(x) =
1
2
ln
1+x
1x
, siendo Q
0
(x) la soluci on impar, que diverge para x 1, tal como
se demostr o en el lema III.2.4.
Tanto los polinomios de Legendre P
l
(x) como el par de soluciones linealmente in-
dependientes P
(x), Q
(x) de (III.2.24) para general (denominadas funciones de
Legendre de primera y segunda especie) est an directamente incorporados en la mayora
de los programas de c omputo analtico (por ejemplo [11]). Sus propiedades pueden en-
contrarse, tambi en, en [13], [14] y [15].
132
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
P
0
(x)
Q
0
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
P
1
(x)
Q
1
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
P
2
(x)
Q
2
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
P
3
(x)
Q
3
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
P
1f2
(x)
Q
1f2
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
P
3f2
(x)
Q
3f2
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
Figura 17: Gr acas de las soluciones linealmente independientes de la ecuaci on de Le-
gendre P
(x) y Q
(x), para = 0, 1, 2, 3, 1/2 y 3/2, y x (1, 1).
133
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
III.2.6. Ecuaci on asociada de Legendre y arm onicos esf ericos
Volvamos, ahora, al caso m as general para la dependencia angular del problema con
simetra esf erica (ecuaci on (III.2.23), en que s existe dependencia en el angulo azimutal
, con la condici on de acotaci on en la variable y, adem as, Y (, = 0) = Y (, = 2)
y
Y (, = 0) =
Y (, = 2). Esta ultima condici on (periodicidad en ) garantiza
que las soluciones sean univaluadas. Explcitamente, tendremos
1
sin
_
sin
Y (, )
_
+
1
sin
2
2
Y (, )
2
+ ( + 1)Y (, ) = 0 . (III.2.28)
Una vez m as, podemos proponer una soluci on en variables separadas, es decir, Y (, ) =
()(). De reemplazar este Ansatz en la ecuaci on anterior resulta
()
sin
d
d
_
sin
d()
d
_
+
()
sin
2
d
2
()
d
2
+ ( + 1)()() = 0
o, equivalentemente,
sin
()
d
d
_
sin
d()
d
_
+ ( + 1) sin
2
=
1
()
d
2
()
d
2
.
Como ya comentamos, esta igualdad s olo puede satisfacerse para todos los valores de
y si ambos miembros son iguales a una constante, que llamaremos .
La ecuaci on que involucra la variable azimutal ser a, entonces,
d
2
()
d
2
() = 0 ,
cuya soluci on general es de la forma
() = Asin
+ Bcos
.
La condici on de periodicidad exige que
= m, m Z
+
+0, por lo que = m
2
.
Volviendo ahora a la ecuaci on diferencial en la variable tendremos
sin
()
d
d
_
sin
d()
d
_
+ ( + 1) sin
2
m
2
= 0 .
El mismo cambio de variable que utilizamos en el caso con simetra azimutal conduce,
en el caso presente, a la ecuaci on
(1 x
2
)u
2xu
+
_
( + 1)
m
2
1 x
2
_
u = 0 , (III.2.29)
llamada ecuaci on asociada de Legendre. Esta ecuaci on puede, tambi en, escribirse
[(1 x
2
)u
+
_
( + 1)
m
2
sin
2
_
u = 0 ,
que se reduce a la ecuaci on de Legendre (III.2.25) para m = 0.
Sin perder generalidad podemos tomar Re[] 1/2. Es conveniente realizar el
cambio de variable u = (1 x
2
)
m/2
w. Se obtiene entonces la ecuaci on
(1 x
2
)w
2(m + 1)xw
+ [( + 1) m(m+ 1)]w = 0 . (III.2.30)
134
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Proponiendo una serie de potencias para w, se obtiene
c
n+2
= c
n
n(n 1) + (2n + m)(m+ 1) ( + 1)
(n + 2)(n + 1)
= c
n
(n + + 1 + m)( mn)
(n + 2)(n + 1)
. (III.2.31)
Si m = k, con k entero positivo, c
k+2
= 0 y la soluci on con la misma paridad de k es
un polinomio de grado k. Estas son las unicas soluciones acotadas de (III.2.30) en (1, 1).
En el caso usual, m es entero, y soluciones acotadas de (III.2.30) existir an entonces s olo
para = l m, con l entero positivo. La soluci on con la misma paridad de l m
ser a entonces un polinomio de grado l m.
Si bien podemos obtener dichos polinomios por medio de (III.2.31), es f acil ver que
si u(x) es soluci on de la ecuaci on de Legendre (III.2.24), entonces su derivada em esima
u
(m)
(x) satisface la ecuaci on (III.2.30):
(1 x
2
)u
(m+2)
2(m + 1)xu
(m+1)
+ [( + 1) m(m+ 1)]u
(m)
= 0.
Por lo tanto, para m entero positivo, las soluciones de (III.2.29) son de la forma (1
x
2
)
m/2
u
(m)
(x), con u(x) soluci on de (III.2.24). Para y m entero, con = l m,
obtenemos as las denominadas funciones asociadas de Legendre, denidas por
P
m
l
(x) = (1)
m
(1 x
2
)
m/2
d
m
dx
m
P
l
(x), 0 m l ,
que son polinomios (de grado l) s olo para m entero y que constituyen las unicas solucio-
nes acotadas de (III.2.29) en (1, 1). Se dene tambi en
P
m
l
(x) = (1)
m
(l m)!
(l + m)!
P
m
l
(x) ,
veric andose
_
1
1
P
m
l
(x)P
m
l
(x)dx =
ll
2
2l + 1
(l +m)!
(l m)!
,
_
1
1
P
m
l
(x)P
m
l
(x)dx =
ll
(1)
m
2
2l + 1
.
135
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
P
2
0
(x)
P
2
1
(x)
P
2
2
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
P
1
1
(x)
Q
1
1
(x)
1 0.5 0.5 1
x
2
1
1
2
f (x)
Figura 18: Izquierda: Gr acas de las funciones asociadas de Legendre P
2
2
(x) = 3(1x
2
),
P
1
2
(x) = 3x
1 x
2
, P
0
2
(x) = (3x
2
1)/2. Derecha: Las dos soluciones li-
neal. independientes de (III.2.29) para m = l = 1, P
1
1
(x) =
1 x
2
, Q
1
1
(x) =
1 x
2
[
1
2
ln
1x
1+x
x
1x
2
].
Notemos que las soluciones de la ecuaci on angular (III.2.28), para un dado valor de l,
tienen la forma P
m
l
(cos ) cos m o P
m
l
(cos ) sin m. Es convenci on usual permitir va-
lores negativos de m, asignando valores negativos de ma las autofunciones que contienen
la funci on cos m y valores de m positivos a las que contienen sin m. As, por ejemplo,
Y
0
l
(, ) = P
0
l
(cos ) = P
l
(cos )
Y
k
l
(, ) = P
k
l
(cos ) cos k
Y
k
l
(, ) = P
k
l
(cos ) sin k
para k = 1, 2, ..., l.
Se conoce a estas funciones como arm onicos esf ericos. La soluci on general, para l
dado, est a dada por
Y
l
=
l
m=l
C
l, m
Y
m
l
(, ) .
Es interesante estudiar el comportamiento de los arm onicos esf ericos sobre la esfera
S
2
, borde de la bola tridimensional. Para eso, demostraremos el siguiente
Teorema III.2.7 (Ceros de los polinomios de Legendre y de sus derivadas):P
l
(x) tiene
l ceros en (1, 1) y
d
m
P
l
dx
m
, con m l tiene l m ceros en el mismo intervalo abierto.
Adem as, esta ultima no se anula en los extremos del intervalo.
Demostraci on
Recordemos que, seg un la f ormula de Rodrigues, P
l
(x) =
1
2
l
l!
d
l
dx
l
(x
2
1)
l
=
1
2
l
l!
d
l
dx
l
(x).
Para l = 0 el resultado es evidente. Consideremos, entonces, (x) = (x
2
1)
l
con l 1.
se anula en los extremos. Por el teorema sobre el cero de la derivada, su derivada tiene
al menos un cero en el intervalo abierto. Adem as, esta ultima tambi en se anula en los
extremos si l 1. En este ultimo caso, la derivada segunda de tiene, al menos, dos
ceros en el abierto y, si l 2, se anula en los extremos. Continuando este razonamiento
136
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Figura 19: Signos de los arm onicos esf ericos.
se concluye que si la derivada l- esima de tiene, al menos, l ceros en (1, 1); dado
que, adem as, se trata de un polinomio de grado l, debe tener exactamente l ceros. Esto
demuestra que P
l
tiene l ceros en (1, 1).
Para demostrar la segunda parte del teorema, observemos que P
l
(x) no se anula
en ninguno de los extremos del intervalo. Por el teorema sobre el cero de la derivada,
su derivada tiene, al menos l 1 ceros (ya que entre dos ceros del polinomio hay, al
menos, uno de su derivada. Pero, dado que se trata de un polinomio de grado l 1, tiene
exactamente l 1 ceros en el abierto. Adem as, no se anula en los extremos. Continuando
este razonamiento concluimos que
d
m
P
l
dx
m
, m l tiene l m ceros en (1, 1).
Demostrado este teorema, podemos establecer en qu e regiones de S
2
se anulan los
Y
m
l
= sin
m
d
m
P
l
(x)
dx
m
x=cos
cos m
sin m
. En primer lugar, sin se anula en los polos; por
su parte, cos m (o sin m) se anulan en m = k (o m = k
2
) con k 2m es decir,
en 2m meridianos. Finalmente, como acabamos de ver,
d
m
P
l
dx
m
se anula en l m paralelos.
La esfera queda, as, dividida en parcelas. En cada una de esas parcelas, Y
m
l
tiene signo
constante y cambia de signo al pasar a una parcela adyacente, como muestra la Figura 19.
III.2.7. Ecuaci on de Bessel, funciones de Bessel y funci on Gamma
Volviendo a nuestro ejemplo del c alculo de autovalores para el operador laplaciano en
la bola tridimensional, recordamos que nos queda por resolver la ecuaci on (III.2.21) en lo
que concierne a la funci on que contiene la dependencia radial. Dicha ecuaci on est a dada
por
d
dr
_
r
2
dR(r)
dr
_
+
_
r
2
( + 1)
_
R(r) = 0 .
137
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Deniendo ( + 1) +
1
4
, x =
r y u =
rR, la ecuaci on anterior puede
llevarse a la forma
u
+
u
x
+ (1
2
x
2
)u = 0 . (III.2.32)
Esta es la ecuaci on de Bessel de orden , que estudiaremos a continuaci on. Notar que
la soluci on a nuestro problema estar a dada por R(r) = r
1
2
u(
r), que se conoce como
funci on de Bessel esf erica. Adem as del problema que usamos para motivar su estudio, la
ecuaci on de Bessel surge naturalmente al resolver problemas con simetra cilndrica, de
all la importancia de estudiar sus soluciones.
La ecuaci on (III.2.32) es de la forma contemplada en el teorema III.2.2. Aplicando
dicho resultado obtenemos, deniendo a
2
= a
1
= 0,
n=0
x
s+n2
[a
n
[(n + s)(n + s 1) + (n + s)
2
] + a
n2
] = 0 .
Para n = 0, se obtiene a
0
[s(s 1) + s
2
] = 0, que conduce a la ecuaci on indicial
s
2
2
= 0, es decir,
s = .
Se obtiene, entonces, a
1
= 0. Para n 2,
a
n
=
a
n2
(n +s)
2
2
=
a
n2
n(n + 2s)
.
Si s = , con Re() 0, esto implica
a
2n
a
2n2
=
1
4n(n + )
=
(1)
n+1
2
2n
(n 1)! (n + )
(1)
n
2
2n+2
n! (n + + 1)
.
Hemos utilizado aqu la funci on Gamma denida, para x > 0, por
(x) =
_
0
e
t
t
x1
dt .
Esta funci on satisface, para x > 1, la relaci on
(x) = (x 1)(x 1)
(esto puede verse integrando por partes). Adem as, (1) = 1, (1/2) =
. Se obtiene
entonces, para x natural o semientero positivo,
(n) = (n 1)!, (n +
1
2
) =
(2n)!
n!2
2n
.
Para x +,
(x + 1) =
2e
x
x
x+1/2
[1 + O(x
1
)] , (III.2.33)
lo cual determina el comportamiento de n! para n grande. La denici on anterior es tam-
bi en v alida para x = z complejo si Re[z] > 0. Para z complejo arbitrario, (z) se dene
por continuaci on analtica, siendo analtica en todo el plano complejo, excepto en los en-
teros negativos o en z = 0, donde posee polos simples ( lm
zn
(z + n)(z) = (1)
n
/n!).
Se verica, adem as, que ()( + 1) sin() = .
138
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
La relaci on de recurrencia se satisface, entonces, si
a
2n
= c
(1)
n
2
2n
n!(n + + 1)
.
Para c = 2
se obtiene as la funci on de Bessel
J
(x) =
n=0
(1)
n
n!(n + + 1)
(
x
2
)
+2n
,
llamada tambi en funci on de Bessel de primera especie, que es una de las soluciones de
(III.2.32). Aplicando el criterio del cociente puede verse f acilmente que la serie converge
x o x C. Si no es entero, la otra soluci on linealmente independiente de
(III.2.32) es
J
(x) =
n=0
(1)
n
n! (n + 1)
(
x
2
)
+2n
.
Si > 0 es entero, la relaci on de recurrencia para s = no puede prolongarse para n
, y el procedimiento anterior no es v alido para obtener la segunda soluci on linealmente
independiente (para n 0 entero, J
n
(x) lm
n
J
(x) = (1)
n
J
n
(x)). Se utiliza
entonces, como segunda soluci on, la funci on
Y
(x) =
cos()J
(x) J
(x)
sin()
,
denominada funci on de Bessel de segunda especie o funci on de Neumann o Weber.
La ventaja es que el lmite de Y
(x) para n, con n > 0 entero, proporciona la
otra soluci on linealmente independiente de (III.2.32), que es de la forma J
(x) ln(x) +
x
n=0
b
n
x
n
. La forma explcita de Y
(x), as como otras propiedades y funciones
asociadas, se presentan en la p agina siguiente.
Para semientero, J
(x) e Y
(x) pueden expresarse en t erminos de senos y cosenos.
Por ejemplo, es f acil ver que J
1/2
(x) =
_
2x
sin x
x
, Y
1/2
(x) =
_
2x
cos x
x
. En general,
J
n+1/2
(x) =
_
2x
x
n
(
1
x
d
dx
)
n
(
sinx
x
),
Y
n+1/2
(x) =
_
2x
x
n
(
1
x
d
dx
)
n
(
cos x
x
).
Cabe destacar nalmente que, si k ,= 0, la soluci on general de la ecuaci on
u
+
u
x
+ (k
2
2
x
2
)u = 0. (III.2.34)
es
u(x) = AJ
(kx) + BY
(kx) (III.2.35)
El n umero k puede ser real o complejo. Para k = i, las funciones J
(ix), Y
(ix) son com-
binaciones lineales de las denominadas funciones de Bessel modicadas I
(x), K
(x)
(v ease p ag. siguiente y [13], [14], [15]).
139
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Funciones de Bessel: Resumen
J
(z) = (
z
2
)
n=0
(1)
n
n!(n + + 1)
(
z
2
4
)
n
Y
(z) =
cos()J
(z) J
(z)
sin()
( / Z)
Y
(z) =
2
[J
(z) ln
z
2
(
z
2
)
n=0
(1)
n
[(n) + (n + )]
2n!(n + )!
(
z
2
4
)
n
(
z
2
)
n=0
( n 1)!
2n!
(
z
2
4
)
2n
] , Z ,
con (m) =
(m+1)
(m)
((x) denota la funci on Gamma) y la ultima suma presente s olo
para ,= 0.
Las funciones J
(kx) y Y
(kx) son soluciones de la ec. diferencial
u
+
u
x
+ (k
2
2
x
2
)u = 0 .
F ormulas asint oticas para [z[ 1:
J
(z)
_
2
z
cos[z ( +
1
2
)
2
], Y
(z)
_
2
z
sin[z ( +
1
2
)
2
] .
Funciones de Hankel (o funciones de Bessel de 3
a
especie):
H
1,2
(z) = J
(z) iY
(z) .
Para [z[ 1,
H
(z)
1,2
=
_
2
z
e
i[z(+
1
2
)
2
]
.
Funciones de Bessel modicadas:
I
(z) = i
(iz), K
(z) = i
+1
2
[J
(iz) + iY
(iz)] .
I
(kz) y K
(kz) son soluciones de la ec. diferencial
u
+
u
x
(k
2
+
2
x
2
)u = 0 .
Para [z[ 1,
I
(z)
e
z
2z
, K
(z)
_
2z
e
z
.
140
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
J
0
(x)
J
1
(x)
5 10 15 20
x
0.5
0.5
1
J
2
(x)
J
3
(x)
5 10 15 20
x
0.5
0.5
1
J
0
(x)
Y
0
(x)
5 10 15 20
x
0.5
0.5
1
J
1
(x)
Y
1
(x)
5 10 15 20
x
0.5
0.5
1
J
0
(x)
2
x
Cos[xf4]
5 10 15 20
x
0.5
0.5
1
1.5
J
1
(x)
2
x
Cos[x3f4]
5 10 15 20
x
1
0.5
0.5
1
K
0
(x)
I
0
(x)
1 2 3
x 0
2
4
K
1
(x)
I
1
(x)
1 2 3
x 0
2
4
Figura 20: Gr acos de las primeras funciones de Bessel J
n
, Y
n
, K
n
e I
n
.
141
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
III.2.8. Otras funciones especiales de utilidad en Fsica
Funci on Hipergeom etrica conuente
Consideremos la ecuaci on
xu
+ (b x)u
au = 0, (III.2.36)
que surge en muchos problemas de Mec anica Cu antica al resolver la ecuaci on de Schr odin-
ger unidimensional. Las races de la ecuaci on indicial s(s 1) + bs = 0 son s = 0 y
s = 1 b. Por lo tanto, si b no es 0 o entero negativo, una de las soluciones es una serie
de potencias u(x) =
n=0
c
n
x
n
, con
c
n+1
= c
n
n +a
(n + 1)(n + b)
y c
0
,= 0. Para c
0
= 1 se obtiene as la soluci on
u
1
(x) = F[a, b, x] 1 +
a
b
x +
a(a + 1)
2! b(b + 1)
x
2
+ . . .
=
[b]
[a]
n=0
[n +a]
n! [n + b]
x
n
, (III.2.37)
que se denomina funci on hipergeom etrica conuente. Converge x (como resulta claro a
partir de (III.2.36)). Para a = n, con n entero positivo, se reduce a un polinomio de grado
n. En particular, los polinomios de Laguerre generalizados se denen, para 0 m n,
como
L
m
n
[x] = (1)
m
(n!)
2
m!(n m)!
F[(n m), m + 1, x],
y surgen al resolver la ecuaci on de Schr odinger para el atomo de hidr ogeno. Para m = 0
se denominan, simplemente, polinomios de Laguerre.
Es f acil ver que, si b no es entero, la otra soluci on linealmente independiente de
(III.2.36) es
u
2
(x) = x
1b
F[a b + 1, 2 b, x],
ya que, si se sustituye u = x
1b
w, se obtiene para w la ecuaci on
xw
+ (2 b x)w
(a b + 1)w = 0,
que es de la forma (III.2.36) con b 2 b, a a b + 1.
Para x y a ,= n, F[a, b, x]
[b]
[a]
e
x
x
ab
. La funci on F[a, b, x] est a tambi en
directamente incorporada a la mayora de los programas de c alculo analtico (por ej. [11]),
y sus propiedades pueden encontrarse en [13], [14], [15].
Funci on Hipergeom etrica
142
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Consideremos, ahora, la ecuaci on
x(1 x)u
+ [b (a
1
+ a
2
+ 1)x]u
a
1
a
2
u = 0. (III.2.38)
Las races de la ecuaci on indicial s(s 1) +bs = 0 son, nuevamente, s = 0 y s = 1 b.
Por lo tanto, si b no es 0 o entero negativo, una de las soluciones es una serie de potencias
u(x) =
n=0
c
n
x
n
, con
c
n+1
= c
n
n(n 1 + a
1
+ a
2
+ 1) + a
1
a
2
(n + 1)(n +b)
= c
n
(n +a
1
)(n + a
2
)
(n + 1)(n + b)
y c
0
,= 0. Para c
0
= 1 se obtiene as la soluci on
u
1
(x) = F[a
1
, a
2
, b, x]
1 +
a
1
a
2
1! b
x +
a
1
(a
1
+ 1)a
2
(a
2
+ 1)
2! b(b + 1)
x
2
+ . . .
=
[b]
[a
1
][a
2
]
n=0
[n + a
1
][n +a
2
]
n![n + b]
x
n
, (III.2.39)
que se denomina funci on hipergeom etrica. Converge para [x[ < 1 (como es obvio a partir
de la ecuaci on) y es sim etrica con respecto a a
1
y a
2
. Si a
1
= n (o a
2
= n), con
n entero positivo, se reduce a un polinomio de grado n. En particular, los polinomios de
Jacobi se denen como
P
,
n
(x) =
[ +n + 1]
n![ + 1]
F[n, + + n + 1, + 1, (1 x)/2].
Para = = 0 se reducen a los polinomios de Legendre, vistos anteriormente.
Es f acil ver que si b no es entero, la otra soluci on linealmente independiente de
(III.2.38) es
u
2
(x) = x
1b
F[a
2
b + 1, a
1
b + 1, 2 b, x]
ya que, si se sustituye u = x
1b
w, se obtiene para w una ecuaci on del tipo (III.2.38) con
a
1
a
2
b + 1, a
2
a
1
b + 1 y b 2 b. Esta funci on y sus propiedades est an
tambi en incorporadas a los programas de c alculo analtico (por ejemplo [11]) y aparecen
en las tablas [13], [14], [15].
III.2.9. Desarrollos en series de autofunciones de L (funciones espe-
ciales)
1) Serie de Polinomios de Legendre
143
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
Retornemos a la ecuaci on de Legendre, escrita ahora en la forma
((1 x
2
)u
= u, x [1, 1] . (III.2.40)
Esta ecuaci on puede verse como la ecuaci on de autovalores de un operador de Sturm-
Liouville, con p(x) = 1x
2
= (1+x)(1x) y q(x) = 0. En este caso, p(x) posee ceros
simples en x = 1 y x = 1 por lo que imponemos como condici on de contorno que u(x)
permanezca acotada en ambos bordes (x = 1). Como vimos antes, esto ocurre s olo si
= l(l + 1), con l = 0, 1, . . . (lo que determina los autovalores), y, en tal caso, para la
soluci on con la misma paridad de l, que es un polinomio de Legendre:
u(x) = P
l
(x), = l(l + 1), l = 0, 1, . . . .
Los polinomios de Legendre forman, pues, una base completa ortogonal en [1, 1]. Po-
demos desarrollar, entonces, una funci on en dicho intervalo como
f(x) =
l=0
c
l
P
l
(x), x [1, 1] ,
con (recordar que
_
1
1
P
2
l
(x)dx = 2/(2l + 1))
c
l
=
2l + 1
2
_
1
1
f(x)P
l
(x)dx.
Notemos que las races de la ecuaci on indicial en x = 1 son ambas 0. Esto implica que
la soluci on no acotada de (III.2.40) tendr a una divergencia logartmica en el extremo.
2) Serie de Polinomios asociados de Legendre
Consideremos, ahora,
((1 x
2
)u
+
m
2
1 x
2
u = u, x [1, 1].
Esta ecuaci on puede verse como la ecuaci on de autovalores de un operador de Sturm-
Liouville, con p(x) = (1 x
2
) y q(x) = m
2
/(1 x
2
). En este caso, q(x) posee polos
simples en x = 1 y en x = 1, y es positiva para x (1, 1). La condici on de contorno
a imponer es, nuevamente, que la autofunci on permanezca acotada en x = 1 y x = 1.
Como vimos en III.2.6, esto implica, para m > 0 entero, que l = m, m + 1, m + 2, . . .,
con l entero, en cuyo caso u(x) es el polinomio generalizado de Legendre:
u(x) = P
m
l
(x) , = l(l + 1), l = m, m + 1, m + 2, . . . .
Podemos desarrollar, entonces, una funci on en [1, 1] tambi en como
f(x) =
l=m
c
l
P
m
l
(x), x [1, 1] ,
144
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
con
c
l
=
2l + 1
2
(l m)!
(l + m)!
_
1
1
f(x)P
m
l
(x)dx
=
(1)
m
(2l + 1)
2
_
1
1
f(x)P
m
l
(x)dx.
3) Serie de Bessel
La ecuaci on de Bessel u
+ u
/x + (k
2
2
/x
2
)u = 0 puede escribirse como
(xu
+
2
x
u = xu, (III.2.41)
con = k
2
, que corresponde a la ecuaci on de autovalores de un operador de Sturm-
Liouville con p(x) = x, q(x) = /x y (x) = x. Esta ecuaci on, con x = r, surge, por
ejemplo, al resolver
w(r, ) = w(r, )
con =
2
r
2
+
1
r
r
+
1
r
2
2
, el Laplaciano en coordenadas polares, en una regi on circular
(a
0
r a, 0
0
), para soluciones de la forma w(r, ) = u(r)e
i
. Supondremos
real.
Consideremos primero x [0, a]. Como p posee un cero simple en x = 0, la condici on
de contorno en x = 0 debe ser [u(0)[ < . En x = a supondremos la condici on de
Dirichlet u(a) = 0, aunque para otras condiciones de contorno locales el procedimiento
es similar. La soluci on general de (III.2.41) es
u(x) = AJ
x) +BY
x).
La condici on [u(0)[ < implica B = 0, mientras que la condici on u(a) = 0 implica
J
a) = 0,
o sea,
a = k
n
, n = 1, 2, . . . con J
(k
n
) = 0.
Aqu, k
n
son las races de J
(x), que forman un conjunto numerable de n umeros reales.
Los autovalores y autofunciones correspondientes son entonces
n
= (k
n
/a)
2
, u
n
(x) = J
(k
n
x/a) , (III.2.42)
siendo las autofunciones ortogonales con respecto al producto interno (u, v)
x
=
_
a
0
u(x)v(x)xdx,
es decir,
_
a
0
J
(k
n
x/a)J
(k
m
x/a)xdx =
nm
N
2
n
,
145
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
donde
N
2
n
=
_
a
0
J
2
(k
n
x/a)xdx =
a
2
2
J
(k
n
). (III.2.43)
En efecto, multiplicando (III.2.41) por 2xu
obtenemos 2[(xu
xu
+(x
2
2
)uu
] = 0,
de donde [(xu
)
2
+ (x
2
2
)u
2
]
= 2xu
2
y
_
u
2
(x)xdx =
(xu
)
2
+ (x
2
2
)u
2
2
.
Por lo tanto, si u(x) = J
(kx),
_
a
0
J
2
x)xdx =
a
2
2
[J
a) + (1
2
a
2
)J
2
a],
que conduce al resultado (III.2.43) para = (k
n
/a)
2
.
El conjunto de autofunciones J
(k
n
x/a), n = 1, 2, . . . , es completo en [0, a] por
ser L autoadjunto con las presentes condiciones de contorno. Entonces, para x [0, a] ,
podemos desarrollar una funci on f que satisfaga dichas condiciones como
f(x) =
n=0
c
n
J
(k
n
x/a),
donde sealamos que la suma es sobre n y no , con
c
n
=
2
a
2
J
2
(k
n
)
_
a
0
f(x)J
(k
n
x/a)xdx.
Por ejemplo, los primeros ceros de J
0
(x) son
k
0
1
2, 405 = 0,765, k
0
2
5, 52 = 1, 76, k
0
3
8, 65 = 2, 75 ,
con k
0
n
(n
1
4
) para n grande, en virtud de las f ormulas asint oticas para J
0
(x).
Para una condici on de contorno de Neumann en x = a (u
(a) = 0), el tratamiento es
similar, pero tendremos que utilizar los ceros de J
(x).
En el caso de un anillo 0 < a < x < b, con condiciones de contorno de Dirichlet
u(a) = u(b) = 0, la soluci on general de (III.2.41) ser a
u(x) = A[J
x) + Y
x)].
Tanto los autovalores
n
como los coecientes
n
que determinan las autofunciones de-
ben obtenerse a partir de las ecuaciones u(a) = 0, u(b) = 0.
Problema sugerido III.2.2: i) Mostrar que la ecuaci on
u
+ 2u
/x + (k
2
l(l + 1)/x
2
)u = 0 ,
146
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
0.2 0.4 0.6 0.8 1.0
x
1.0
0.5
0.0
0.5
1.0
J
0
k
n
0
x
0.2 0.4 0.6 0.8 1.0
x
1.0
0.5
0.0
0.5
1.0
J
1
k
n
1
x
0.2 0.4 0.6 0.8 1.0
x
1
0
1
2
j
12
k
n
12
x
0.2 0.4 0.6 0.8 1.0
x
1
0
1
2
j
32
k
n
32
x
Figura 21: Gr acas de las primeras tres autofunciones (III.2.42) (arriba, funciones de
Bessel) y (III.2.44) (abajo, funciones de Bessel esf ericas), para = 0, 1 y l = 0, 1 respec-
tivamente.
con 0 < x < a, u(a) = 0, corresponde al problema de autovalores de Sturm-Liouville
(x
2
u
l(l + 1)u = x
2
u,
con = k
2
.
ii) Mostrar que los autovalores y autofunciones son
n
= (k
l+1/2
n
)
2
/a
2
, u
n
(x) = j
n
(x)
1
x
J
l+1/2
(k
l
n
x/a) , (III.2.44)
con k
l+1/2
n
las races de J
l+1/2
(x).
iii) Plantear el desarrollo en serie correspondiente y dar una expresi on para los coecien-
tes del mismo.
147
III.2 RESOLUCI
ON DE ECUACIONES LINEALES HOMOG
ENEAS
MEDIANTE SERIES DE POTENCIAS. FUNCIONES ESPECIALES
148
Captulo IV
Serie y Transformada de Fourier
149
IV.1 SERIE DE FOURIER
IV.1. Serie de Fourier
Como hemos visto en la secci on III.1.5, cada operador de Sturm-Liouville con su
dominio denido por ciertas condiciones de contorno determina un desarrollo para una
dada funci on f en serie de autofunciones dentro de un cierto intervalo. Para L =
d
2
dx
2
y
(x) = 1, la serie correspondiente se denomina, en general, serie trigonom etrica o serie de
Fourier, y la estudiaremos aqu en detalle. Analizaremos, primero, la base proporcionada
por las autofunciones peri odicas de L en [, ], de la cual pueden derivarse los dem as
casos.
Las autofunciones correspondientes a tal operador de Sturm-Liouville, caso particular,
con a = , de las ya obtenidas en el ejemplo (II.7.4), son de la forma:
u
0
(x) = C; u
n
(x) =
_
Asin (nx)
Bcos (nx)
n = 1, .... (IV.1.1)
La propiedad fundamental 2) en la misma secci on asegura la convergencia absoluta
y uniforme del desarrollo en estas autofunciones para funciones con derivada segunda
que satisfacen las condiciones de contorno peri odicas en [, ]; pero el desarrollo es
aplicable tambi en a funciones m as generales, como discutiremos m as adelante en esta
secci on.
IV.1.1. Coecientes de Fourier
Supongamos, primero, que tal desarrollo es convergente a f(x):
f(x) =
1
2
a
0
+
n=1
[a
n
cos(nx) + b
n
sin(nx)], x (, ). (IV.1.2)
En primer lugar, suponiendo v alida la expansi on (IV.1.2), los coecientes a
n
, b
n
pue-
den determinarse haciendo uso de la ortogonalidad (y la norma) de las funciones cos(nx)
y sin(nx), discutida anteriormente. Por ejemplo, integrando ambos lados de (IV.1.2) entre
y , tendremos
_
dxf(x) = a
0
. (IV.1.3)
Notemos que
1
2
a
0
=
f =
1
2
_
f(x)dx es el valor medio de f en [, ].
Para calcular a
n
, n ,= 0, multiplicamos ambos miembros de (IV.1.2) por cos (kx) , k ,=
0 e integramos entre y , de donde resulta
a
k
=
1
dxf(x) cos (kx), k = 1, ..., . (IV.1.4)
Similarmente, multiplicando por sin(kx), k ,= 0, e integrando:
b
k
=
1
dxf(x) sin (kx), k = 1, ..., . (IV.1.5)
151
IV.1 SERIE DE FOURIER
Los coecientes as determinados se denominan coecientes de Fourier. La serie re-
sultante est a dada por
f(x) =
1
2
_
f(x)dx +
1
n=1
_
dx
f(x
) [cos (nx) cos (nx
)
+ sin (nx) sin (nx
)] , (IV.1.6)
que puede escribirse en forma m as compacta como
f(x) =
f +
1
n=1
_
dx
f(x
) cos [n(x x
)] , (IV.1.7)
donde
f es el valor promedio de la funci on f(x) en el intervalo.
IV.1.2. Teoremas de Fourier sobre convergencia puntual
Seg un se adelant o, estudiaremos ahora condiciones m as d ebiles para la convergencia
de la serie de Fourier, contenidas en dos teoremas, tambi en conocidos como teoremas de
Fourier. Para poder demostrarlos, necesitaremos demostrar antes el siguiente lema:
Lema IV.1.1 (de Riemann-Lebesgue) Si g es continua en [a, b] salvo, a lo sumo, en un
n umero nito de puntos en los que permanece acotada, entonces
lm
s
_
b
a
g(x) sin(sx + )dx = 0 . (IV.1.8)
Demostraci on Si g es derivable en [a, b], la demostraci on es inmediata. En efecto,
integrando por partes,
_
b
a
g(x) sin(sx + )dx =
_
b
a
g(x)
d
dx
_
cos (sx + )
s
_
dx =
g(x)
cos(sx + )
s
b
a
+
_
b
a
g
(x)
cos(sx + )
s
dx, (IV.1.9)
expresi on que tiende a 0 para s . El mismo razonamiento es v alido si g es deri-
vable salvo en un n umero nito de puntos, siempre y cuando existan (y sean nitas) las
derivadas laterales.
Si g es s olo continua en [a, b], sea (x
0
= a, x
1
, . . . , x
n
= b) una partici on de [a, b],
152
IV.1 SERIE DE FOURIER
con x
i
x
i1
= (b a)/n. Entonces,
[
_
b
a
g(x) sin(sx + )dx[ = [
n
i=1
_
x
i
x
i1
g(x) sin(sx + )dx[
= [
n
i=1
g(x
i
)
_
x
i
x
i1
sin(sx + )dx +
_
x
i
x
i1
[(g(x)g(x
i
)] sin(sx + )dx[
i=1
_
[g(x
i
)[
[ cos(sx
i
+ )cos(sx
i1
+)[
s
+
m
i
(ba)
n
_
2Mn
s
+M
n
(b a) , (IV.1.10)
donde M es el m aximo de g en [a, b], m
i
el m aximo de [g(x) g(x
i
)[ en [x
i1
, x
i
] y M
n
el m aximo de los m
i
. Por lo tanto,
lm
s
[
_
b
a
g(x) sin(sx)[dx M
n
(b a),
pero M
n
puede hacerse tan chico como se desee al aumentar n por ser g continua
( lm
n
M
n
= 0). Lo mismo ocurre si reemplazamos sin(sx + ) por cos(sx + ). Esto
demuestra el lema aun si g(x) no es derivable en ning un punto.
Finalmente, si g es discontinua s olo en un n umero nito de puntos en los que perma-
nece acotada, podemos separar estos puntos x
c
mediante integrales
_
x
c
+
x
c
g(x) sin(sx + ) dx, que tienden a 0 para 0 por ser g acotada, y repetir el
razonamiento anterior en los intervalos restantes, donde es continua.
Ahora s podemos demostrar tres teoremas de Fourier sobre la convergencia de la
serie.
Teorema IV.1.2 (Teorema 1 de Fourier) Sea f(x) derivable (por lo tanto, continua) en
[, ]; entonces, la igualdad (IV.1.7) vale x (, ). Si, adem as, f() = f(), la
serie converge a f en [, ].
Demostraci on Las sumas parciales en (IV.1.7) est an dadas por
S
n
(x) =
1
2
a
0
+
n
m=1
a
m
cos(mx) + b
m
sin(mx)
=
1
f(t)dt
1
2
+
n
m=1
cos(mx) cos(mt)+sin(mx) sin(mt)
=
1
dt f(t)
1
2
+
n
m=1
cos[m(tx)]=
1
f(t)K
n
(t x) dt ,
153
IV.1 SERIE DE FOURIER
con
K
n
(s) =
1
2
+
n
m=1
cos[ms] =
1
2
n
m=n
e
ims
=
e
i(n+1)s
e
ins
2(e
is
1)
=
sin[(n+
1
2
)s]
2 sin[
1
2
s]
, (IV.1.11)
donde se supone que, si s = 0 o, en general, s = 2k, con k entero, K
n
(2k) =
lm
s2k
K
n
(s) = n +
1
2
, que es el valor correcto de la suma para s = 2k. Adem as, de
la suma de cosenos que dene a K
n
(s) se ve que
_
K
n
(t x)dt = . (IV.1.12)
Por lo tanto, sumando y restando f(x),
S
n
(x) = f(x) +
1
(f(t) f(x))K
n
(t x)dt
= f(x)+
1
f(t)f(x)
2 sin[
1
2
(tx)]
sin[(n+
1
2
)(tx)]dt. (IV.1.13)
Usando el lema de Riemann-Lebesgue es, ahora, inmediato demostrar la conver-
gencia para x (, ). En este caso, la funci on g(t) =
f(t)f(x)
2 sin[(tx)/2]
si t ,= x, con
g(x) = f
(x), es continua t [, ], incluyendo t = x, si f es derivable:
lm
tx
f(t) f(x)
2 sin[
1
2
(t x)]
= f
(x) ,
por lo que la integral en (IV.1.13) se anula para n y
lm
n
S
n
(x) = f(x) x (, ) . (IV.1.14)
Hasta aqu, hemos demostrado la primera parte del enunciado.
Si x = , el denominador de g(t) se anula tanto para t como para t .
Sin embargo, si x = , K
n
(t x) es una funci on par de t. En efecto,
K
n
(t ) =
sin [(n +
1
2
)(t )]
2 sin (
t
2
)
=
sin [(n +
1
2
)(t )]
2 sin (
t
2
)
=
sin [(n +
1
2
)(t )]
2 sin (
t
2
)
(IV.1.15)
y, por lo tanto,
_
0
K
n
(t x)dt =
_
0
K
n
(t x)dt =
1
2
.
154
IV.1 SERIE DE FOURIER
Para x = podemos, entonces, escribir
S
n
(x) =
f()+f()
2
+
1
_
0
f(t)f()
2 sin[
1
2
(t x)]
sin[(n+
1
2
)(tx)]dt
+
1
_
0
f(t) f()
2 sin[
1
2
(t x)]
sin[(n +
1
2
)(t x)]dt, (IV.1.16)
donde el primer y segundo cociente permanecen acotados para t y t respec-
tivamente (tienden a f
()). Aplicando el lema de Riemann, obtenemos, pues,
lm
n
S
n
() =
f() + f()
2
,
que coincide con f() si f() = f().
Teorema IV.1.3 (Teorema 2 de Fourier) Si f es continua en [a, b] pero f
(x) no existe
en un n umero nito de puntos aislados x
c
, donde s existen, en cambio, las derivadas
laterales
f
(x
c
) = lm
tx
c
f(t) f(x
c
)
t x
c
, (IV.1.17)
la serie de Fourier converge a f(x), aun para x = x
c
.
Demostraci on: En las condiciones enunciadas, g(t) =
f(t)f(x)
2 sin[(tx)/2]
es continua para
t ,= x y permanece acotada para t x, aun si x = x
c
( lm
tx
c
g(t) = f
(x
c
)), cumpliendo
con las condiciones del lema de Riemann-Lebesgue.
Teorema IV.1.4 (Teorema 3 de Fourier) Si f es continua y derivable en [, ], salvo
en un n umero nito de puntos aislados x
c
, en los que existen, sin embargo, los lmites y
derivadas laterales
f(x
c
) lm
xx
c
f(x), f
(x
c
) = lm
tx
c
f(t) f(x
c
)
t x
c
,
entonces la serie tambi en converge a f(x) en los puntos x (, ) donde f es continua.
En los puntos x
c
donde es discontinua, la serie converge al punto medio:
lm
n
S
n
(x) =
1
2
[f(x
+
c
) +f(x
c
)]. (IV.1.18)
Demostraci on: En primer lugar, si x (, ), combinando (IV.1.12) con el lema
(IV.1.8) obtenemos, para > 0,
= lm
n
_
K
n
(t x)dt = lm
n
_
x+
x
K
n
(t x)dt
= 2 lm
n
_
x+
x
K
n
(t x)dt = 2 lm
n
_
x
K
n
(tx)dt, (IV.1.19)
155
IV.1 SERIE DE FOURIER
por ser K
n
(s) par.
Notemos, ahora, que g(t) =
f(t)f(x)
2 sin[(tx)/2]
satisface las condiciones del lema para t
[, ] si x ,= x
c
, y para t ,= x
c
si x = x
c
. En este caso,
S
n
(x
c
) =
1
_
x
c
f(t)K
n
(t x
c
)dt +
1
_
x
c
f(t)K
n
(t x
c
)dt. (IV.1.20)
La segunda integral puede escribirse como
f(x
+
c
)
_
x
c
K
n
(t x
c
)dt +
_
x
c
f(t) f(x
+
c
)
2 sin[
1
2
(tx
c
)]
sin[(n+
1
2
)(tx
c
)]dt.
Para n , el segundo t ermino se anula por el lema de Riemann, pues g(t) =
f(t)f(x
+
c
)
2 sin[
1
2
(tx
c
)]
permanece acotado para t x
+
c
( lm
tx
+
c
g(t) = f
+
(x
c
)), mientras que el
primer t ermino tiende a
1
2
f(x
+
c
). An alogamente, la primera integral en (IV.1.20) tiende a
1
2
f(x
c
). Esto conduce al resultado (IV.1.18).
IV.1.3. Otras formas de convergencia
Convergencia uniforme: Si f posee derivada continua en [, ], y f[] = f[],
puede demostrarse que la convergencia de la serie de Fourier es absoluta y uniforme para
x [, ]. En este caso la serie de Fourier es derivable t ermino a t ermino, convergiendo
la serie derivada a f
(x) para x (, ).
Si f(x) es discontinua en un punto x
c
o f[] ,= f[] entonces la convergencia no es
uniforme. Esto es evidente, ya que una serie de funciones continuas no puede converger
uniformemente a una funci on discontinua. En las mismas condiciones, si derivamos la se-
rie t ermino a t ermino obtendremos una serie que no necesariamente es convergente punto
a punto (v ease el ejemplo IV.1.4 en la secci on IV.1.7). Otra de las manifestaciones de la
convergencia no uniforme es el fen omeno de Gibbs en los bordes de una discontinuidad.
Puede demostrarse que, si f es continua en [, ] y posee un n umero nito de m axi-
mos y mnimos locales, se cumple que lm
n
S
n
(x) = f(x) para x (, ), aun cuando
f no sea derivable.
Finalmente, puede demostrarse que basta con exigir la existencia de
_
[f(x)]
p
dx
para p = 1 y p = 2, para demostrar que
lm
n
_
[f(x) S
n
(x)]
2
dx = 0.
Este tipo de convergencia se denomina convergencia en media y es menos restrictiva que
la convergencia puntual.
Los detalles de las demostraciones de nuestras armaciones previas pueden encon-
trarse en [7].
156
IV.1 SERIE DE FOURIER
A un menos exigente es la convergencia como distribuci on (convergencia d ebil): Se
dice que S
n
converge a f como distribuci on si
lm
n
_
S
n
(x)g(x)dx =
_
f(x)g(x)dx
para cualquier funci on de prueba g, aun si la serie S
n
(x) no converge puntualmente en
ning un punto (v ease el ejemplo IV.1.3 en la secci on IV.1.7). Este tipo de convergencia es
frecuentemente utilizado en Fsica.
IV.1.4. Forma compleja del desarrollo
Como
cos(nx)
i sin(nx)
=
1
2
(e
inx
e
inx
), podemos escribir (IV.1.2) como una serie de
potencias en e
ix
,
f(x) = c
0
+
n=1
(c
n
e
inx
+ c
n
e
inx
) = P
n=
c
n
e
inx
,
con P
n=
= lm
m
m
n=m
el valor principal y
c
n
= c
n
=
1
2
(a
n
ib
n
) =
1
2
_
f(x)e
inx
dx.
IV.1.5. Serie de Fourier para otros intervalos de periodicidad
Si f est a denida en [a, a], el reemplazo x x/a conduce al desarrollo
f(x) =
a
0
2
+
n=1
a
n
cos(nx) + b
n
sin(nx), (IV.1.21)
para x (a, a), donde
= /a,
a
n
=
1
a
_
a
a
f(x) cos(nx)dx, b
n
=
1
a
_
a
a
f(x) sin(nx)dx.
La serie converge a una funci on peri odica de perodo 2a = 2/, siendo la frecuencia
correspondiente. En la forma compleja,
f(x) = P
n=
c
n
e
inx
, c
n
=
1
2a
_
a
a
f(x)e
inx
dx.
157
IV.1 SERIE DE FOURIER
IV.1.6. Desarrollos de medio rango. Series de senos y de cosenos
Si f(x) = f(x) (funci on par) b
n
= 0 n y
f(x) =
a
0
2
+
n=1
a
n
cos(nx), (IV.1.22)
a
n
=
2
a
_
a
0
f(x) cos(nx)dx.
Si f(x) = f(x) (funci on impar) a
n
= 0 n y
f(x) =
n=1
b
n
sin(nx), (IV.1.23)
b
n
=
2
a
_
a
0
f(x) sin(nx)dx.
Una funci on f denida s olo en [0, a] puede, entonces, desarrollarse en serie de cosenos
o senos, convergiendo la serie a la extensi on peri odica par o impar de f. Estos desarrollos
corresponden al problema de autovalores de L en [0, a], con las condici on de contorno de
Neumann (caso par) y Dirichlet (caso impar).
IV.1.7. Algunos ejemplos
Ejemplo IV.1.1: f(x) = x, x [, ]. Se obtiene a
n
= 0 n y
b
n
=
1
xsin(nx)dx =
2(1)
n+1
n
,
por lo que
x = 2
n=1
(1)
n+1
sin(nx)
n
, [x[ < . (IV.1.24)
En x = , la serie converge a
1
2
[f() + f()] = 0.
La serie converge, en realidad, a la extensi on peri odica
f(x) = x 2n si + 2n < x < + 2n ,
siendo discontinua en x = + 2n.
Ejemplo IV.1.2: Si f(x) =
1
2
x
2
, b
n
= 0 n y a
n
= 2(1)
n
/n
2
si n 1, con a
0
=
2
/3,
por lo que
1
2
x
2
=
2
6
+ 2
n=1
(1)
n
cos(nx)
n
2
, [x[ ,
158
IV.1 SERIE DE FOURIER
que coincide con la integral t ermino a t ermino de la serie (V.5.22). El desarrollo converge
tambi en en x = , ya que f() = f(). Para x = 0 y , el desarrollo anterior conduce
a las identidades
n=1
(1)
n+1
n
2
=
2
12
,
n=1
1
n
2
=
2
6
.
Ejemplo IV.1.3:
f(x) =
1
2a
, [x[ < a < ,
con f(x) = 0 si [x[ > a. Obtenemos b
n
= 0 y a
n
= sin(na)/(na) si n 1, con
a
0
= 1/. Por lo tanto,
f(x) =
1
[
1
2
+
n=1
sin(na)
na
cos(nx)], [x[ . (IV.1.25)
Para x = a, la serie converge al valor medio
1
4a
.
Se pueden extraer dos conclusiones muy importantes:
i) Al disminuir a, aumenta el n umero de coecientes a
n
con valor apreciable en
(IV.1.25). En efecto, sin(na)/na 1 si n 1/a, anul andose por primera vez para
n /a. El n umero de coecientes a
n
con valor apreciable aumenta, por lo tanto, como
1/a al disminuir a. Cuanto m as corto es el pulso (respecto de ) mayor es el n umero de
frecuencias necesarias para representarlo correctamente.
ii) Para a 0, f(x) (x) y obtenemos como lmite
(x) =
1
[
1
2
+
n=1
cos(nx)] =
1
2
P
n=
e
inx
, [x[ ,
que puede obtenerse directamente utilizando las f ormulas usuales para f(x) = (x). La
serie anterior no converge puntualmente, pero s converge como distribuci on a (x) para
[x[ . En efecto, la suma parcial es
S
n
(x) =
1
[
1
2
+
n
m=1
cos(mx)] =
sin[(n +
1
2
)x]
2 sin(
1
2
x)
y satisface, utilizando el lema de Riemann,
_
S
n
(x)dx = 1, n 0,
lm
n
_
S
n
(x)f(x)dx = f(0)+ lm
n
_
f(x)f(0)
sin(
1
2
x)
sin[(n+
1
2
)x]dx = f(0),
159
IV.1 SERIE DE FOURIER
funci on de prueba f. Por periodicidad obtenemos, entonces, para x ,
m=
(x 2m) =
1
[
1
2
+
n=1
cos(nx)] =
1
2
P
n=
e
inx
.
Ejemplo IV.1.4: Si derivamos t ermino a t ermino el desarrollo (IV.1.24) de f(x) = x
obtenemos la serie
2
n=1
(1)
n+1
cos(nx), (IV.1.26)
que no converge puntualmente. Esto se debe a que f() ,= f(), siendo entonces la
convergencia de (IV.1.24) no uniforme. No obstante, (IV.1.26) converge como distribu-
ci on a
f
(x) = 1 2
m=
(x + 2m),
que es la derivada (como distribuci on) de la extensi on peri odica de x.
Ejemplo IV.1.5: Desarrollo en serie de Fourier de medio rango de la funci on de Green en
[0, a] para condiciones de contorno de Dirichlet:
G(x, x
) =
x(1x
/a) 0<x<x
<a
x
(1x/a) 0<x
<x<a
.
Se obtienen los coecientes b
n
=
2
a
_
a
0
G(x, x
) sin(nx/a)dx = sin(nx
/a)/(n/a)
2
.
Por lo tanto,
G(x, x
) =
n=1
sin(nx/a) sin(nx
/a)
(n/a)
2
,
que coincide con el desarrollo general en autofunciones presentado en (III.1.5), G(x, x
) =
n=1
u
n
(x)u
n
(x
)/
n
.
Ejemplo IV.1.6: Pulso cuadrado y Fen omeno de Gibbs
Consideremos ahora en detalle el desarrollo en serie de Fourier en [1, 1] de f(x) =
H(1/2 [x[),
f(x) =
_
1 [x[ < 1/2
0 [x[ > 1/2
(IV.1.27)
en el intervalo: [1, 1]. Los coecientes de Fourier son:
a
n
=
_
1
1
f(x) cos(nx)dx =
_
_
_
(1)
n1
2
2
n
n impar
1 n = 0
0 n 2, par
, b
n
=
_
1
1
f(x) sin(nx)dx = 0 .
160
IV.1 SERIE DE FOURIER
La suma parcial de orden n (impar) es entonces
S
n
(x) =
1
2
a
0
+
n
m=1
a
m
cos(mx) =
1
2
+
2
mimpar
(1)
m1
2
cos(mx)
m
=
1
2
+
2
[cos(x)
1
3
cos(3x) +
1
5
cos(5x) . . . +
(1)
n1
2
n
cos(nx)] .
Podemos ver que, en este caso, para n impar,
S
n
(x) = 2[sin(x) sin(3x) + sin(5x) . . . + (1)
n1
2
sin(nx)]
= (1)
n+1
2
sin[(n + 1)x]
cos(x)
pues, escribiendo sin(nx) =
e
inx
e
inx
2i
, la suma parcial S
n
(x) puede expresarse como
una suma geom etrica.
Si x = 1/2 + , es f acil ver que
S
n
(1/2 + ) =
sin[(n + 1)]
sin()
.
En primer lugar, esto muestra que, para x 1/2 ( 0), S
n
(x) (n + 1), como se
observa en las dos ultimas gr acas, divergiendo para n . An alogamente, S
n
(x)
(n + 1) para x 1/2.
En segundo lugar, vemos que el 0 de S
n
(x) m as pr oximo a x = 1/2 ocurre para
= 1/(n+1). Estos valores corresponden al mnimo y m aximo de S
n
(x) m as pr oximo
a x = 1/2, que son precisamente los valores extremos de S
n
(x) como se aprecia en las
gr acas. Estos valores son, deniendo
n
= 1/(n + 1),
S
n
(
1
2
n
) =
1
2
+
_
1/2
n
1/2
S
n
(x)dx =
1
2
_
n
0
sin[(n + 1)]
sin()
d
=
1
2
1
_
0
sin(t)
(n + 1) sin[t/(n + 1)]
dt .
Para n 1, (n + 1) sin[t/(n + 1)] t y obtenemos
S
n
(
1
2
n
)
1
2
1
_
0
sin(t)
t
dt =
1
2
sinintegral()
=
_
0,08949 . . .
1,08949 . . .
,
lo que indica un exceso del 8, 9 % en ambos lados de la discontinuidad. Para n ,
estos valores son exactos. Esto implica que al aumentar n, este exceso, denominado
fen omeno de Gibbs, no desaparece, es decir, no se aplasta, pero ocurre para va-
lores cada vez m as pr oximos a 1/2, pues
n
0. No afecta pues el valor del lmite
lm
n
S
n
(x) en cualquier punto x jo, incluyendo x = 1/2 (pues S
n
(1/2) = 1/2 n).
N otese tambi en que este exceso de las sumas parciales nitas ocurrir a en los bordes de
toda discontinuidad nita. Siempre podemos considerar una funci on con una discontinui-
dad nita f(x
+
0
) f(x
0
) = ,= 0 en un punto x
0
, como la suma de una funci on continua
m as una funci on tipo escal on similar a la del presente ejemplo, pero multiplicada por y
trasladada a x
0
, que originar a entonces el mismo exceso relativo.
161
IV.1 SERIE DE FOURIER
n 1
1.0 0.5 0.5 1.0
x
0.5
1.0
1.5
f (x), S
n
(x)
n 3
1.0 0.5 0.5 1.0
x
0.5
1.0
1.5
f (x), S
n
(x)
n 5
1.0 0.5 0.5 1.0
x
0.5
1.0
1.5
f (x), S
n
(x)
n 11
1.0 0.5 0.5 1.0
x
0.5
1.0
1.5
f (x), S
n
(x)
n 21
1.0 0.5 0.5 1.0
x
0.5
1.0
1.5
f (x), S
n
(x)
n 51
1.0 0.5 0.5 1.0
x
0.5
1.0
1.5
f (x), S
n
(x)
n 21
1.0 0.5 0.5 1.0
x
40
20
20
40
S'
n
(x)
n 51
1.0 0.5 0.5 1.0
x
40
20
20
40
S'
n
(x)
Figura 22: Gr aca de la funci on (IV.1.27) y las correspondientes sumas parciales de
Fourier S
n
(x) para n = 1, 3, 5, 11, 21, 51. Los dos ultimos paneles muestran la gr a-
ca de la derivada S
n
(x) =
dS
n
dx
para n = 21 y 51, que converge como distribuci on a
f
(x) = (x +
1
2
) (x
1
2
) en [1, 1].Estas gr acas muestran el comportamiento de las
sumas parciales de la serie de Fourier para una funci on discontinua, y ponen en evidencia
el car acter no uniforme de la convergencia y la existencia del llamado fen omeno de Gibbs
en los puntos de discontinuidad, explicado a continuaci on.
162
IV.1 SERIE DE FOURIER
n0
1 0.5 0.5 1
x
1f4
1f2
f (x), S
n
(x)
n1
1 0.5 0.5 1
x
1f4
1f2
f (x), S
n
(x)
n2
1 0.5 0.5 1
x
1f4
1f2
f (x), S
n
(x)
n3
1 0.5 0.5 1
x
1f4
1f2
f (x), S
n
(x)
n5
1 0.5 0.5 1
x
1f4
1f2
f (x), S
n
(x)
n10
1 0.5 0.5 1
x
1f4
1f2
f (x), S
n
(x)
0 1 5 10 15 20
n
0.25
0
0.25
0.5
a
n
0 2 4 6 8 10 12 14
n
0.2
0.1
0
0.1
0.2
a
n
Figura 23: Gr aco de f(x) = x
2
/2 y las correspondientes sumas parciales de Fourier
S
n
(x) = 1/6 +
2
n
m=1
(1)
m
m
2
cos(mx) en el intervalo [1, 1], para algunos valores
de n. La prolongaci on peri odica de esta funci on es continua (aunque no derivable) en
x = 1, y por lo tanto el fen omeno de Gibbs no se produce en el borde. El ultimo panel
muestra los coecientes de Fourier a
n
en el ejemplo de la g. 22 (izquierda) y en el
presente (derecha). Los coecientes decrecen m as r apidamente en este caso, asegurando
convergencia absoluta de la serie x.
163
IV.2 TRANSFORMADA DE FOURIER
IV.2. Transformada de Fourier
IV.2.1. Denici on y unicidad
Consideremos nuevamente la forma compleja del desarrollo en serie de Fourier de una
funci on f : [L, L] :
f(x) = P
n=
c
n
e
inx/L
, c
n
=
1
2L
_
L
L
f(x)e
inx/L
dx, (IV.2.1)
donde P
n=
indica el valor principal P
n=
= lm
m
m
n=m
. Podemos reescribir la serie
como
f(x) =
1
k
F(k)e
ikx
k, (IV.2.2)
donde k =
n
L
, k =
L
y
F(k) =
2c
n
L
=
1
2
_
L
L
f(x)e
ikx
dx. (IV.2.3)
Consideremos ahora el lmite L . En este lmite, k 0 y las ecuaciones (IV.2.2)
(IV.2.3) tienden a
f(x) =
1
2
_
F(k)e
ikx
dk, (IV.2.4)
F(k) =
1
2
_
f(x)e
ikx
dx, (IV.2.5)
suponiendo que ambas integrales converjan. Aqu, hemos denotado
_
lm
r
_
r
r
. Es
decir, las integrales son consideradas en valor principal.
La funci on F : denida por (IV.2.5) se denomina Transformada de Fourier
(TF) de la funci on f (f : ) y la expresi on (IV.2.4), que recupera f a partir de
F, es la antitransformada de F. Estas expresiones constituyen la generalizaci on de la
serie de Fourier para funciones f denidas en (, ) (y de m odulo integrable). Hemos
elegido las constantes de modo de hacer evidente la simetra de las ecuaciones (IV.2.4)-
(IV.2.5). Sin embargo, son posibles tambi en otras convenciones para denir la TF (puede,
por ejemplo, omitirse el factor 1/
2 en (IV.2.4) y reemplazar el de (IV.2.5) por 1/(2)
o viceversa, y tambi en reemplazar e
ikx
por e
ikx
). Las ecuaciones (IV.2.4)(IV.2.5) son
v alidas para cualquier funci on f : continua que satisfaga
_
[f(x)[dx < y
que posea un n umero nito de m aximos y mnimos. Si f posee una discontinuidad aislada
nita en un punto x
0
, la integral en (IV.2.4) converge al punto medio, como ocurre en la
serie de Fourier.
164
IV.2 TRANSFORMADA DE FOURIER
Desde el punto de vista fsico, la expresi on (IV.2.4) se entiende como el desarrollo de
la funci on f(x) en t erminos de funciones arm onicas puras e
ikx
= cos(kx) +i sin(kx), de
frecuencia k (y perodo 2/k), siendo F(k) el peso (amplitud) de la frecuencia k en la
expansi on de f.
Demostraremos ahora explcitamente la validez de las ecuaciones (IV.2.4)(IV.2.5)
(equivalentemente, que la relaci on entre TF y antitransformada de Fourier es uno a uno)
para funciones f continuas y derivables lateralmente en cualquier punto, que satisfagan
_
[f(x)[dx < . La demostraci on es muy similar a la efectuada para la serie de Fou-
rier. Las ecuaciones (IV.2.4)(IV.2.5) implican
f(x) =
_
1
2
[
_
e
ik(xx
)
dk]f(x
)dx
,
de modo que lo que debe demostrarse es que
1
2
_
e
ik(xx
)
dk = (x x
), (IV.2.6)
donde
_
dk = lm
r
_
r
r
dk. En efecto,
1
2
_
r
r
e
ikt
dk =
1
2
e
irt
e
irt
it
=
1
sin(rt)
t
, con
1
sin(rt)
t
dt =
1
sin(u)
u
du = 1.
Por lo tanto,
_
[
1
2
_
r
r
e
ik(xx
)
dk]f(x
)dx
=
_
sin[r(x x
)]
(x x
)
f(x
)dx
=
_
sin(rt)
t
[f(x + t) f(x) +f(x)]dt
= f(x) +
_
sin(rt)
f(x + t) f(x)
t
dt. (IV.2.7)
Para r , el segundo t ermino en (IV.2.7) se anula por el Lema de Riemann (v ease
(IV.1.2)) si f es una funci on derivable, al menos lateralmente, en x (ya que, en estas
condiciones, (f(x+t)f(x))/t permanece acotado para t 0) e integrable en (, ).
Queda as demostrada la ecuaci on (IV.2.6). Obviamente, la composici on de transformada
y antitransformada en el orden inverso conduce tambi en a la identidad.
La ecuaci on (IV.2.6) implica tambi en
_
k
(x)
k
(x)dx =
1
2
_
e
ix(kk
)
dx = (k k
), (IV.2.8)
indicando que las funciones
k
(x) = e
ikx
/
2 son ortogonales respecto del producto
interno (u, v) =
_
(x)v(x)dx y est an normalizadas respecto de la variable k, si
interpretamos por esto ultimo precisamente la condici on (IV.2.8).
N otese que la convergencia de las integrales (IV.2.6)(IV.2.8) debe entenderse en el
sentido de las distribuciones (convergencia d ebil).
165
IV.2 TRANSFORMADA DE FOURIER
IV.2.2. Propiedades b asicas de la transformada de Fourier
Se resumen en la siguiente tabla:
f(x) F(k)
0 f(x) F(k)
1 f(ax) (a ,= 0) F(k/a)/[a[
2 f(x + b) e
ikb
F(k)
3 f
(x) ikF(k)
4 f
(n)
(x) (ik)
n
F(k)
5 x
n
f(x) (n N) i
n
F
(n)
(k)
6 F(x) f(k)
7 f(x)e
ibx
(b ) F(k b)
8 (f g)(x)
2F(k)G(k)
9 f(x)g(x) (F G)(k)/
2
donde (f g) denota la convoluci on de f y g:
(f g)(x) =
_
f(x x
)g(x
)dx
= (g f)(x)
y (F G)(k) =
_
F(k k
)G(k
)dk
= (G F)(k), la convoluci on de F y G.
Demostraciones:
Propiedades 13:
_
f(ax)
e
ikx
2
dx =
1
[a[
_
f(u)
e
iku/a
2
du =
F(k/a)
[a[
.
_
f(x + b)
e
ikx
2
dx =
_
f(u)
e
iku
2
e
ikb
du = e
ikb
F(k).
_
(x)
e
ikx
2
dx = f(x)
e
ikx
2
[
+ ik
_
f(x)
e
ikx
2
dx = ikF(k),
donde hemos supuesto que f
(x) 0 para x .
La propiedad 4 resulta por inducci on (suponiendo que f
(m)
() = 0 si m n) y la
5 se obtiene en forma similar (suponiendo F
(m)
() = 0 para m n).
La propiedad 6 es consecuencia de las ecuaciones (IV.2.4)(IV.2.5).
Propiedad 8:
_
(f g)(x)
e
ikx
2
dx =
_
f(x x
)g(x
)
e
ik(xx
+x
2
dx
dx =
_
f(u)e
iku
du
_
g(x
)
e
ikx
2
dx
2F(k)G(k). (IV.2.9)
Problema sugerido IV.2.1: Demostrar las propiedades 7 y 9.
166
IV.2 TRANSFORMADA DE FOURIER
IV.2.3. Otras propiedades de la Transformada de Fourier
Propiedad 10
La TF conserva el producto escalar entre funciones (producto interno complejo):
(g, f)
_
(x)f(x)dx =
1
2
_
g(x)dx
_
e
ikx
F(k)dk
=
1
2
_
g(x)e
ikx
dxF(k)dk =
_
(k)F(k)dk = (G, F),
donde G es la TF de g. Esto implica, en particular, que la TF conserva la norma:
[[f[[
2
(f, f) =
_
[f(x)[
2
dx =
_
[F(k)[
2
dk = (F, F).
Propiedad 11
Si f es real F(k) = F(k)
(para k real). Se deduce inmediatamente de la expre-
si on
F(k) =
1
2
[
_
f(x) cos(kx)dx i
_
f(x) sin(kx)dx]. (IV.2.10)
Propiedad 12
La propiedad 0 implica que, si f es par (f(x) = f(x)), F(k) es par (F(k) =
F(k)).
A partir de (IV.2.10) vemos tambi en que, en este caso,
_
f(x) sin(kx)dx = 0 y
F(k) =
1
2
_
f(x) cos(kx)dx =
_
2
_
0
f(x) cos(kx)dx,
siendo F real si f es real.
Si f es impar (f(x) = f(x)) F(k) es impar. Entonces,
_
f(x) cos(kx)dx = 0 y
F(k) =
i
2
_
f(x) sin(kx)dx = i
_
2
_
0
f(x) sin(kx)dx,
siendo F imaginario si f es real.
Propiedad 13
A partir de la denici on (IV.2.5) y la propiedad 5 se obtiene
_
f(x)dx =
2F(0), (IV.2.11)
_
f(x)x
n
dx =
2i
n
F
(n)
(0), (IV.2.12)
donde n = 0, 1, 2, . . .. Las derivadas de F(k) en el origen permiten, pues, evaluar en
forma inmediata las integrales (IV.2.11)(IV.2.12).
167
IV.2 TRANSFORMADA DE FOURIER
IV.2.4. Algunas transformadas de Fourier utiles
(H(x) denota la funci on de Heaviside, a > 0 y b real )
f(x) F(k)
1 e
a|x|
_
2
a
a
2
+k
2
2 e
ax
H(x)
1
2
1
a+ik
3 e
x
2
/(2a
2
)
ae
a
2
k
2
/2
4
1
x
2
+a
2
_
2a
2
e
a|k|
5 H(x + a) H(x a)
_
2
sin(ak)
k
6 (x)
1
2
7 e
ibx
2(k b)
8 cos(bx)
2
(kb)+(k+b)
2
9 sin(bx)
2
(kb)(k+b)
2i
10 e
x
2
/(2a
2
)
e
ibx
ae
a
2
(kb)
2
/2
Demostraciones:
_
e
a|x|ikx
dx =
_
0
e
x(a+ik)
dx +
_
0
e
x(aik)
dx
=
1
a + ik
+
1
a ik
=
2a
a
2
+ k
2
, a > 0 .
_
e
ax
H(x)e
ikx
dx =
_
0
e
x(a+ik)
dx =
1
a + ik
. (IV.2.13)
_
e
x
2
/2ikx
dx =
_
e
(x+ik)
2
/2k
2
/2
dx = e
k
2
/2
_
+ik
+ik
e
z
2
/2
dz =
2e
k
2
/2
,
donde z = (x + ik). Aqu, hemos completado cuadrados en el exponente y utilizado el
resultado
I =
_
e
x
2
/2
dx =
2,
el cual se obtiene de
I
2
=
_
e
(x
2
+y
2
)/2
dxdy = 2
_
0
e
r
2
/2
rdr = 2
_
0
e
u
du = 2.
Tambi en hemos utilizado el hecho de que e
z
2
/2
es una funci on analtica de z que se anula
para Re[z] . El resultado general 3 (para a ,= 1) se obtiene utilizando la propiedad
2.
168
IV.2 TRANSFORMADA DE FOURIER
6 4 2 2 4 6
x,k
0.2
0.4
f (x), F(k)
6 4 2 2 4 6
x,k
0.2
0.4
f (x), F(k)
Figura 24: Izquierda: Gr aco de f(x) =
e
x
2
/8
8
(azul) y su transformada de Fourier
F(k) =
e
2k
2
2
. Derecha: Gr aco de f(x) =
2
1
x
2
+4
(azul) y su transformada de Fourier
F(k) =
e
2|k|
2
.
Este ejemplo demuestra que la TF de una gaussiana (de ancho a) es tambi en una gaus-
siana (de ancho 1/a). Esto posee una importancia fundamental en diversas aplicaciones.
Notemos que la normalizaci on se conserva:
_
e
x
2
/a
2
dx = a
2
_
e
a
2
k
2
dk =
a.
El ejemplo 4 de la tabla se obtiene del 1 utilizando la propiedad 6, mientras que el ejemplo
5 resulta de
_
[H(x + a) H(x a)]e
ikx
dx =
_
a
a
e
ikx
dx =
e
ika
e
ika
ik
= 2
sin(ka)
k
.
Los ejemplos 6 y 7, que deben entenderse como la TF de una distribuci on (siendo el
resultado otra distribuci on), son consecuencia inmediata de (IV.2.6). El resultado 6 puede
tambi en obtenerse de 5 dividiendo a f y F por 2a y tomando el lmite a 0, de acuerdo
con la relaci on (x) = H
(x).
Los ejemplos 8-9 se derivan de lo anterior en forma inmediata, recordando que cos(ax) =
e
iax
+e
iax
2
, sin(ax) =
e
iax
e
iax
2i
. Implican que la TF de una funci on f(x) peri odica de
perodo 2L (que puede desarrollarse en serie de Fourier) presenta picos tipo localizados
en n, con = /L y n entero. De 10 se puede reobtener 7 en el lmite a +.
Es importante destacar que, cuanto m as esparcida est e f(x) (por ejemplo, a grande en
el ejemplo 3), tanto m as concentrada estar a F(k), y viceversa, debido a la propiedad 1 de
la primera tabla de propiedades. Los ejemplos 6 y 7 son casos extremos de esta propie-
dad, la cual est a estrechamente relacionada con el principio de incerteza de la Mec anica
Cu antica.
Problema sugerido IV.2.2: Obtener el resultado 10 de la tabla anterior a partir de 3.
169
IV.2 TRANSFORMADA DE FOURIER
IV.2.5. Desarrollos de medio rango: Transformadas seno y coseno
An alogamente a lo que hicimos en el caso de la serie de Fourier, para un intervalo
(0, ) podemos considerar las extensiones par e impar de una cierta funci on f denida
para x 0. Si completamos a f en forma par para x < 0, obtenemos, teniendo en cuenta
la propiedad 10,
f(x) =
_
2
_
0
F
c
(k) cos(kx)dk, (IV.2.14)
F
c
(k) =
_
2
_
0
f(x) cos(kx)dx. (IV.2.15)
La ecuaci on (IV.2.15) se denomina transformada coseno de f(x) y coincide con la TF de
f completada en forma par. La transformada inversa tiene, en este caso, una expresi on
id entica a la de la TF.
Si se completa a f en forma impar para x < 0, se obtiene, utilizando nuevamente la
propiedad 10,
f(x) =
_
2
_
0
F
s
(k) sin(kx)dk, (IV.2.16)
F
s
(k) =
_
2
_
0
f(x) sin(kx)dx. (IV.2.17)
La ecuaci on (IV.2.17) se denomina transformada seno de f, y satisface F
s
(k) = iF(k),
donde F(k) es la TF de f completada en forma impar.
IV.2.6. Transformada de Fourier discreta
Consideremos, en lugar de una funci on f : , una funci on denida s olo en un
n umero nito n de puntos x
j
, j = 0, . . . , n1, tal que f
j
= f(x
j
). En este caso es posible
denir una transformada de Fourier discreta F
k
de la siguiente forma:
F
k
=
1
n
n1
j=0
f
j
e
2i j k/n
, k = 0, . . . , n 1. (IV.2.18)
Conocidos los n valores F
k
, los n valores f
j
pueden recuperarse exactamente mediante la
transformaci on inversa, dada por
f
j
=
1
n
n1
k=0
F
k
e
2i j k/n
, j = 0, . . . , n 1. (IV.2.19)
Esto puede demostrarse f acilmente, reemplazando F
k
por su denici on:
1
n
n1
k=0
[
1
n
n1
=0
f
j
e
2ij
k/n
]e
2ijk/n
=
n1
=0
f
j
[
1
n
n1
k=0
e
2ik(jj
)/n
] = f
j
,
170
IV.2 TRANSFORMADA DE FOURIER
donde hemos utilizado el resultado
1
n
n1
k=0
e
2ik(jj
)/n
=
jj
=
_
1 j = j
0 j ,= j
, (IV.2.20)
v alido para j, j
enteros. En efecto, si j = j
, e
2ik(jj
)/n
= 1 y
n1
k=0
e
2ik(jj
)/n
= n,
mientras que, si j ,= j
(y [j j
[ < n),
n1
k=0
e
2ik(jj
)/n
=
1 e
2i(jj
)
1 e
2i(jj
)/n
= 0
para j j
entero.
Dado que e
i20k/n
= e
i2nk/n
= 1, es posible denir f
n
= f
0
, F
n
= F
0
, y as evaluar
las sumas para j = 1, . . . , n (en lugar de j = 0, . . . , n 1), sin alterar los resultados
nales previos. Tambi en es posible denir f
j
= f
nj
, F
k
= F
nk
, ya que e
i2kj/n
=
e
i2k(nj)/n
si j y k son enteros (extensi on cclica de f
j
y F
k
).
Podemos ver, tambi en, que la transformada discreta de Fourier as denida es una
transformaci on unitaria, ya que conserva el producto escalar est andar:
(f, g) =
n
j=1
f
j
g
j
=
1
n
n
j=1
n
k=1
F
k
e
i2jk/n
g
j
=
n
k=1
F
k
G
k
= (F, G) (IV.2.21)
En particular, [f[
2
=
n
j=1
[f
j
[
2
=
n
k=1
[F
k
[
2
= [F[
2
.
Problema sugerido IV.2.3:
a) Probar que, si f
j
es constante (f
j
= c j), F
k
=
k0
c
n (o sea, F
k
= 0 salvo
para k = 0).
b) Probar que, si f
j
= ce
i2mj/n
, con 0 m n 1 F
k
= c
km
n.
c) Probar que, si f
j
= c
jm
(f
j
= 0 salvo para j = m, con m entre 0 y n 1)
F
k
= ce
2imk/n
/
n, k = 0, . . . , n 1 (o sea, [F
k
[ = [c[/
n k).
171
IV.2 TRANSFORMADA DE FOURIER
3 2 1 1 2 3
x
2
1
1
2
3
4
fx
0 2 4 6 8 10 12 14
n
1
0.5
0
0.5
1
1.5
a
n
15 10 5 5 10 15
x
1
1
2
3
fx
15 10 5 5 10 15
k
1
1
2
3
Fk
5 10 15 20
j
5
5
f
j
5 10 15 20
k
5
5
F
k
Figura 25: Reconstrucci on de una funci on a partir de su transformada. Arriba: Gr aco
de una funci on par peri odica f(x) de perodo 2 (izquierda) y sus coecientes de Fourier
a
n
(derecha) (b
n
= 0 n). Estos permiten reconocer que f(x) no es m as que la suma
de una constante a
0
m as tres t erminos de la forma a
n
cos(nx), con n = 1, 5 y 8.
Centro: Gr aco de una funci on par no peri odica f(x) y su transformada de Fourier
F(k).
Esta permite reconocer, a partir del resultado 10 de la tabla en (IV.2.4) y dado
que los picos de F(k) son aprox. gaussianos, que f(x) est a determinada esencialmente
por tres frecuencias k
1
= 1, k
2
= 5, k
3
= 10, moduladas por gaussianas, tal que
f(x)
3
i=1
c
i
e
x
2
/(2
2
i
)
cos(k
i
x). Abajo: Una funci on discreta f(j) = f
j
denida para
j = 1, . . . , 20, y su transformada de Fourier discreta F
k
.
Esta permite reconocer que f
j
no es m as que la suma de tres t erminos de la forma
k
cos(2kj/20), con k = 1, 3 y 6.
Problema sugerido IV.2.4: Derivar las expresiones aproximadas anteriores para
f(x) o f
j
a partir del gr aco de a
n
, F(k) y F
k
, y dar el valor aproximado de los
par ametros intervinientes.
172
IV.3 TRANSFORMADA DE LAPLACE
IV.3. Transformada de Laplace
Dada una funci on f(x) denida para x 0, la transformada de Laplace (TL) se dene
como
L
f
(p) =
_
0
e
px
f(x)dx. (IV.3.1)
Si f(x) < e
x
para x L
f
(p) converge para Re[p] > . Supondremos esta
condici on en lo sucesivo. Notemos que L
f
(ik) =
_
2
(F
c
(k) iF
s
(k)) en el caso en que
L
f
(ik) existe. Si completamos a f de modo tal que f(x) = 0 para x < 0, L
f
(ik) =
2F(k).
La propiedad fundamental de (IV.3.1) es que las Transformadas de Laplace (TL) de
las derivadas f
(n)
(x) quedan expresadas en t erminos de L
f
(p) y las derivadas de f en el
punto inicial x = 0. En efecto, integrando por partes,
L
f
(p) =
_
0
e
px
f
(x)dx = f(0) + p
_
0
f(x)e
px
dx
= f(0) + pL
f
(p). (IV.3.2)
Por inducci on obtenemos, en forma an aloga,
L
f
(n) (p) =
_
0
e
px
f
(n)
(x)dx = f
(n1)
(0) + p
_
0
e
px
f
(n1)
(x)dx
= f
(n1)
(0) pf
(n2)
(0) . . . p
n1
f(0) + p
n
L
f
(p) . (IV.3.3)
La propiedad que acabamos de demostrar hace que la TL resulte muy pr actica a la
hora de resolver problemas con dadas condiciones iniciales, como veremos en el problema
guiado al nal de esta secci on.
Otra propiedad util se reere a la TL de la convoluci on de funciones f y g denidas
para argumentos positivos,
(f g)(x) =
_
x
0
f(x x
)g(x
)dx
= (g f)(x).
Obtenemos
L
fg
(p) =
_
0
_
x
0
f(x x
)g(x
)e
px
dx
dx =
=
_
0
_
x
0
f(x x
)e
p(xx
)
g(x
)e
px
dx
dx
=
_
0
f(u)e
pu
du
_
0
g(x
)e
px
dx
= L
f
(p)L
g
(p). (IV.3.4)
173
IV.3 TRANSFORMADA DE LAPLACE
Para hallar la transformada inversa, completando a f en forma nula para x < 0, y
considerando la TF de e
x
f(x), con > 0, podemos escribir
e
x
f(x) =
1
2
_
e
ikx
dk
_
0
e
ikx
e
x
f(x
)dx
,
de donde
f(x) =
1
2
_
e
x(+ik)
dk
_
0
e
x
(+ik)
f(x
)dx
=
1
2i
_
+i
i
e
zx
L
f
(z)dz, (IV.3.5)
con z = +ik. El resultado es, en principio, independiente de la elecci on de si las inte-
grales convergen, es decir, si es sucientemente grande. Si es posible cerrar la integral
(IV.3.5) con un semicrculo de radio muy grande a la izquierda de , a lo largo del cual la
integral tiende a cero, por el teorema de los residuos obtenemos
f(x) =
z
i
Res[e
z
i
x
L
f
(z
i
)] ,
donde la suma se extiende sobre todos los polos z
i
de e
zx
L
f
(z).
El mayor inconveniente de la TL es que la relaci on inversa requiere el conocimiento
de L
f
(p) para valores complejos de p. Si, como ocurre en algunos problemas pr acticos,
se dispone tan s olo de una tabla de valores num ericos de L
f
(p) para cierto conjunto nito
de valores reales de p (y no de una expresi on analtica de L
f
(p)) no es posible recuperar
f(x) con gran precisi on (es un tpico problema ill posed o mal denido).
Algunas propiedades y ejemplos (en todos los casos a > 0):
f(x) L
f
(p)
1 f(ax) L
f
(p/a)/a
2 f(x + a) e
pa
L
f
(p)
3 f
(x) f(0) + pL
f
(p)
4 xf(x) d[L
f
(p)]/dp
5 (f g)(x) L
f
(p)L
g
(p)
6 e
ax 1
a+p
7 cos(ax) p/(a
2
+ p
2
)
8 sin(ax) a/(a
2
+ p
2
)
9 H(x a) e
ap
/p
10 (x a) e
pa
Problema guiado IV.3.1: Hallar u(t) tal que
u
+ k
2
u = f(t)
para t > 0, con u(0), u
(0) datos conocidos y k ,= 0.
174
IV.3 TRANSFORMADA DE LAPLACE
Multiplicando la ecuaci on anterior por e
pt
e integrando, obtenemos, utilizando la
ecuaci on (IV.3.3),
u
(0) pu(0) + (p
2
+k
2
)L
u
(p) = L
f
(p),
de donde
L
u
(p) =
u
(0) + pu(0)
p
2
+ k
2
+
1
p
2
+ k
2
L
f
(p).
Utilizando, ahora, las propiedades 5, 7 y 8 de la tabla anterior, obtenemos
u(t) =
1
k
u
(0) sin(kt) + u(0) cos(kt) +
1
k
_
t
0
sin[k(t t
)]f(t
)dt
,
que coincide con el conocido resultado para la soluci on de esta ecuaci on, obtenido me-
diante la funci on de Green.
175
IV.3 TRANSFORMADA DE LAPLACE
176
Captulo V
Ecuaciones Diferenciales en Derivadas
Parciales
177
V.1 INTRODUCCI
ON Y DEFINICIONES
V.1. Introducci on y deniciones
En Fsica, el estudio de sistemas con n umero nito de grados de libertad conduce, en
general, a la resoluci on de ecuaciones diferenciales ordinarias. En cambio, el estudio de
medios continuos requiere la resoluci on de ecuaciones diferenciales en derivadas parciales
(ver captulo VI). Ya hemos dado, en la secci on I.1 la denici on general de una ecuaci on
diferencial en derivadas parciales y de su orden. En particular, empezaremos por analizar
las ecuaciones diferenciales con dos variables independientes.
Denici on V.1.1 Se llama ecuaci on diferencial en derivadas parciales con dos variables
independientes a una relaci on de la forma
F
_
x, y, u(x, y),
u
x
,
u
y
,
2
u
x
2
,
2
u
xy
,
2
u
y
2
, ,
_
= 0,
donde los puntos suspensivos indican posibles dependencias en derivadas de orden su-
perior al segundo. En este libro vamos a restringirnos al estudio de las ecuaciones de
segundo orden. Este es el caso de mayor utilidad en las aplicaciones a la Fsica y, adem as,
permite ilustrar las ideas m as importantes a tener en cuenta en el caso de ecuaciones de
mayor orden.
Denici on V.1.2 La ecuaci on anterior se llama lineal si F lo es con respecto a u(x, y) y
a todas sus derivadas, es decir, si la ecuaci on toma la forma
a
2
u
x
2
+ 2b
2
u
xy
+ c
2
u
y
2
+ d
u
x
+ e
u
y
+fu + g = 0 ,
donde los coecientes a, b, c, d, e, f, g son, en general, funciones de x e y. Si todos estos
coecientes son independientes de ambas variables, la ecuaci on se llama ecuaci on lineal
a coecientes constantes. Si g(x, y) = 0, se llama ecuaci on lineal homog enea.
Es inmediato demostrar que, como en el caso de las ecuaciones diferenciales ordina-
rias, las soluciones de una ecuaci on diferencial lineal homog enea constituyen un espacio
vectorial (equivalentemente, vale el principio de superposici on). Como veremos en un
ejemplo simple a continuaci on, se trata de un espacio vectorial de dimensi on innita.
La generalizaci on de estas deniciones a casos con m as variables independientes y/u
ordenes superiores es evidente.
Consideremos, primero, la ecuaci on lineal de primer orden m as simple,
u
y
= 0 ,
donde u(x, y) es una funci on de dos variables. Es obvio que la soluci on general de esta
ecuaci on es
u(x, y) = f(x) ,
179
V.1 INTRODUCCI
ON Y DEFINICIONES
donde f es una funci on arbitraria que depende s olo de x. As, mientras que el conjunto
de soluciones de una ecuaci on diferencial lineal ordinaria homog enea de primer orden
depende de una constante arbitraria, formando un espacio vectorial de dimensi on 1, en
el presente caso la soluci on general depende de una funci on arbitraria f de la variable x
siendo, por lo tanto, un espacio vectorial de dimensi on innita. La segunda observaci on
es que la soluci on permanece constante a lo largo de una familia de curvas (en este caso,
las rectas verticales x = c). Tales curvas se denominan curvas caractersticas.
Consideremos, ahora, la ecuaci on
a
x
u
x
+ a
y
u
y
= 0 , (V.1.1)
con a
2
x
+ a
2
y
,= 0. Podemos reescribirla como a u = 0, con el operador gradiente
y a = (a
x
, a
y
), de modo que toda funci on que vare s olo a lo largo de una direcci on
perpendicular a a (es decir, que dependa de la coordenada perpendicular) ser a soluci on.
Si, por ejemplo, a
y
,= 0, con a
x
y a
y
constantes, la soluci on general de (V.1.1) puede
escribirse como
u(x, y) = f(x
a
x
a
y
y),
con f derivable, como es f acil vericar: a u = (a
x
a
y
a
x
a
y
)f
(x
a
x
a
y
y) = 0. En este
caso, la soluci on es constante a lo largo de las rectas x
a
x
a
y
y = c, o sea, y = c
+
a
y
a
x
x,
que son paralelas al vector a. Esta familia de rectas se conoce como familia de rectas
caractersticas.
Podemos obtener este resultado en forma m as sistem atica. Notemos primero que, si
se efect ua un cambio de variables (x, y) (x
, y
), con
x
= F(x, y) , y
= G(x, y) ,
siendo la transformaci on invertible, tenemos
x
= F
x
+G
x
y
= F
y
+ G
y
,
donde el subndice indica derivada parcial respecto de la variable respectiva.
Esto puede escribirse en forma matricial como
D = WD
D =
_
x
y
_
, W =
_
F
x
G
x
F
y
G
y
_
, D
=
_
x
_
,
con Det[W] ,= 0.
180
V.2 CLASIFICACI
ON DE ECUACIONES LINEALES DE SEGUNDO
ORDEN CON COEFICIENTES CONSTANTES
La ecuaci on (V.1.1) puede escribirse en forma matricial como (a
x
, a
y
)Du = 0. Plan-
teando la transformaci on lineal
x
= x + y, y
= x + y , ,= (V.1.2)
se obtiene D = WD
, con
W =
_
1 1
_
(V.1.3)
y la ecuaci on (V.1.1) se transforma en (a
x
, a
y
)D
u = 0, o sea,
a
x
u
x
+a
y
u
y
= 0 ,
con
(a
x
, a
y
) = (a
x
, a
y
)W = (a
x
+ a
y
, a
x
+ a
y
) .
Anulando, por ejemplo, a
x
, tenemos a
x
+ a
y
= 0. Por lo tanto, = a
x
/a
y
. Eligiendo
,= , se obtiene a
y
,= 0 y la ecuaci on se transforma, nalmente, en
u
y
= 0 ,
cuya soluci on es
u = f(x
) = f(x
a
x
a
y
y) .
Hemos supuesto a
x
y a
y
constantes. Notar que, sobre cualquier recta caracterstica, la
soluci on de nuestra ecuaci on diferencial permanece constante. En un caso m as gene-
ral, si a
x
y a
y
son funciones de (x, y), podemos emplear un procedimiento similar, pe-
ro utilizando una transformaci on general que cumpla, por ejemplo, con la condici on
a
x
= a
x
F
x
+a
y
F
y
= 0 y a
y
,= 0. La curva caracterstica ser a entonces, x
= F(x, y) = c.
V.2. Clasicaci on de ecuaciones lineales de segundo or-
den con coecientes constantes
V.2.1. Ecuaciones en dos variables
Como hemos dicho, muchos problemas relacionados con medios continuos condu-
cen a ecuaciones en derivadas parciales. Con particular frecuencia aparece la necesidad
de resolver ecuaciones de segundo orden. Aunque a menudo no se trata de problemas
lineales, es frecuente realizar suposiciones que los convierten en tales. En lo que sigue,
discutiremos en detalle la clasicaci on de las ecuaciones lineales de segundo orden en dos
variables independientes con coecientes constantes y generalizaremos al caso, siempre
181
V.2 CLASIFICACI
ON DE ECUACIONES LINEALES DE SEGUNDO
ORDEN CON COEFICIENTES CONSTANTES
de segundo orden, con m as variables independientes. El tratamiento del caso de coecien-
tes variables puede encontrarse en [8]. Para comenzar tendremos, entonces:
a
2
u
x
2
+ 2b
2
u
xy
+ c
2
u
y
2
+ d
u
x
+ e
u
y
+fu + g = 0 , (V.2.1)
con todos los coecientes reales y constantes. Resulta natural preguntarse si es posible,
en general, hacer un cambio de variables no singular (invertible) que reduzca la ecuaci on
anterior a una forma equivalente m as simple, en el sentido de eliminar t erminos en deri-
vadas segundas, en forma similar al mecanismo que permite llevar formas cuadr aticas a
su forma can onica.
La clasicaci on de las ecuaciones de este tipo depende del comportamiento de los
t erminos que contienen derivadas segundas. Empecemos, entonces, por considerar la
ecuaci on de segundo orden
a
2
u
x
2
+ 2b
2
u
xy
+ c
2
u
y
2
= 0 . (V.2.2)
Si a = c = 0 y b ,= 0, se reduce a
2
u
xy
= 0 ,
o sea,
x
(
u
y
) = 0. Entonces,
u
y
= h(y), de donde se obtiene la soluci on general
u(x, y) = f(x) + g(y) ,
con f y g funciones derivables arbitrarias, cada una de una de las dos variables. La so-
luci on general se expresa, entonces, en t erminos de dos funciones arbitrarias, cada una
constante a lo largo de una curva caracterstica.
Volviendo al caso general, para a, b y c constantes la ecuaci on (V.2.2) puede escribirse
en forma matricial como
D
t
ADu = 0 , A =
_
a b
b c
_
,
con D
t
= (
x
,
y
). Supondremos, sin perder generalidad, que c ,= 0. Efectuando la
transformaci on lineal (V.1.2), obtenemos, en t erminos de las nuevas variables, la ecuaci on
D
t
A
u = 0:
a
2
u
x
2
+ 2b
2
u
x
+ c
2
u
y
2
= 0 ,
con
A
=
_
a
_
= W
t
AW
y W dado por (V.1.3), es decir,
a
= a + 2b + c
2
, b
= a + b( + ) + c, c
= a + 2b + c
2
.
182
V.2 CLASIFICACI
ON DE ECUACIONES LINEALES DE SEGUNDO
ORDEN CON COEFICIENTES CONSTANTES
Podemos anular, ahora, tanto a
como c
si elegimos y como las dos races de la
ecuaci on a + 2bx + cx
2
= 0:
=
b
b
2
ac
c
.
Si b
2
ac ,= 0 (o sea, Det[A] ,= 0), ,= y, en tal caso,
b
= 2(a b
2
/c) ,= 0 .
La ecuaci on se reduce, entonces, a
2
u
x
= 0 ,
cuya soluci on general es
u(x, y) = f(x
) + g(y
) .
Las rectas reales que integran las familias x
= x + y = c
1
, con c
1
constante, e
y
= x + y = c
2
, con c
2
constante (cuando existen) se denominan rectas caractersticas.
Notemos que, por ejemplo, sobre la primera de estas familias, se tiene:
x
x
dx +
x
y
dy = dx + dy = 0
y, por ende, las rectas que integran esta familia tienen pendiente
1
. Para la segunda
familia vale un comentario similar: su pendiente es
1
.
Veremos a continuaci on c omo se clasican las ecuaciones lineales y homog eneas del
tipo (V.2.2), seg un sea Det[A] menor, mayor o igual a cero:
1) Caso hiperb olico: b
2
ac > 0 (Det[A] < 0). Las dos races , son reales y
distintas. La soluci on general es, entonces, de la forma
u(x, y) = f(x + y) +g(x + y)
y posee dos rectas caractersticas: x + y = c, y x + y = c
, sobre las cuales f y g son
respectivamente constantes. Un nuevo cambio,
s = x
+ y
, t = x
,
lleva la ecuaci on hip erb olica a la forma
2
u
s
2
2
u
t
2
= 0 .
El ejemplo tpico de ecuaci on hiperb olica es la ecuaci on de ondas en una dimensi on es-
pacial
2
u
x
2
1
v
2
2
u
t
2
= 0 (V.2.3)
183
V.2 CLASIFICACI
ON DE ECUACIONES LINEALES DE SEGUNDO
ORDEN CON COEFICIENTES CONSTANTES
(b = 0, a = 1, c = 1/v
2
), en cuyo caso
= v y la soluci on general es, entonces,
u(x, t) = f(x vt) + g(x + vt) ,
es decir, un pulso descrito por f que se propaga hacia valores crecientes de x con velo-
cidad v m as uno descrito por g, que se propaga hacia valores decrecientes de x con la
misma velocidad.
2) Caso elptico: b
2
ac < 0 (Det[A] > 0). Las dos races son complejas conjugadas,
por lo que y
= (x
. Podemos escribir entonces la soluci on como
u(x, y) = f(z) + g(z
), z = x
= x
b
c
y +
i
c
ac b
2
y .
Esto signica que la soluci on es una suma de una funci on analtica f(z) (denida, por
ejemplo, a trav es de una serie de potencias), y una funci on antianaltica g(z
).
Notemos, tambi en, que mediante la transformaci on lineal real
s =
x
+ y
2
= x
b
c
y, t =
x
2i
=
ac b
2
c
y
es posible llevar la ecuaci on elptica a la forma de Laplace,
2
u
s
2
+
2
u
t
2
= 0 . (V.2.4)
En efecto, la ecuaci on de Laplace es el paradigma de ecuaci on elptica, y su soluci on
general es
u(s, t) = f(s + it) + g(s it) .
Esto est a de acuerdo con el conocido resultado de que las partes real e imaginaria de una
funci on analtica satisfacen la ecuaci on de Laplace. En este caso no existen rectas carac-
tersticas reales.
3) Caso parab olico: b
2
ac = 0 (Det[A] = 0). Aqu existe una sola raz, por lo que
tomamos, si b ,= 0 (en cuyo caso a = b
2
/c ,= 0) = b/c, = 0. Esto conduce a
c
= a y b
= a
= a b
2
/c = 0, por lo que se obtiene
2
u
y
2
= 0 ,
cuya soluci on general es
u(x, y) = f(x
) + y
g(x
) = f(x
b
c
y) + xg(x
b
c
y)
= f(x
b
c
y) + yh(x
b
c
y) .
184
V.2 CLASIFICACI
ON DE ECUACIONES LINEALES DE SEGUNDO
ORDEN CON COEFICIENTES CONSTANTES
Si b = 0 y c ,= 0 a = 0 y podemos tomar x
= x, y
= y en las expresiones anterio-
res. El ejemplo paradigm atico es la ecuaci on de difusi on, pero esta contiene, adem as, un
t ermino de primer orden (se discutir a m as adelante). Notemos que, en este caso, hay una
sola recta caracterstica: x
b
c
y = c. En este sentido, puede decirse que el caso parab olico
es intermedio entre el hiperb olico y el elptico.
V.2.2. Simetras
Destaquemos que la ecuaci on de Laplace (V.2.4), que podemos escribir como D
t
ADu =
0, con D = (
s
,
t
)
t
y A la matriz identidad de 2 2, es invariante frente a rotaciones
en el plano s t:
s
= s cos + t sin , t
= s sin + t cos ,
ya que se tiene W =
_
cos sin
sin cos
_
, con W
t
= W
1
y entonces A
= W
t
AW =
A =
_
1 0
0 1
_
.
Esta propiedad se extiende a la ecuaci on de Laplace en n dimensiones.
An alogamente, la ecuaci on de ondas (V.2.3), que podemos escribir como D
t
ADu =
0, con D = (
x
,
t
)
t
, A = (
1 0
0 1/v
2
), es claramente invariante frente a boosts de Lorentz
en x t:
x
= xcosh + vt sinh , t
= (x/v) sinh +t cos
ya que, en este caso, W =
_
cosh v
1
sinh
v sinh cosh
_
y A
= W
t
AW = A =
_
1 0
0 v
2
_
.
Ambas ecuaciones son, adem as, obviamente invariantes frente a traslaciones s
=
s+a, t
= t +b para la ecuaci on de Laplace, o bien x
= x+a, t
= t +b para la ecuaci on
de ondas, con a y b constantes.
V.2.3. Formulaci on general
Como anticipamos, la clasicaci on de las ecuaciones de la forma (V.2.2) en hiperb oli-
cas, elpticas y parab olicas es totalmente an aloga a la clasicaci on de secciones c onicas o
ecuaciones algebraicas cuadr aticas ((x, y)A(
x
y
) = 0). En el caso que nos ocupa, la matriz
real A es sim etrica y, por lo tanto, es siempre diagonalizable por medio de una transfor-
maci on unitaria real (ver Ap endice A): Existe W, con W
1
= W
t
tal que A
= W
t
AW
es diagonal, es decir, b
= 0. Por lo tanto, la transformaci on correspondiente
x
= W
11
x + W
21
y, y
= W
12
x + W
22
y
lleva la ecuaci on (V.2.2) a la forma diagonal
a
2
u
x
2
+c
2
u
y
2
= 0 ,
185
V.2 CLASIFICACI
ON DE ECUACIONES LINEALES DE SEGUNDO
ORDEN CON COEFICIENTES CONSTANTES
donde a
, c
son los autovalores de A, que son siempre reales:
a
=
a + c
2
_
(
a c
2
)
2
+b
2
.
Caso hiperb olico: Corresponde a autovalores no nulos de signos opuestos: Det(A) =
a
= ac b
2
< 0
Caso elptico: Corresponde a autovalores no nulos del mismo signo: Det(A) = a
> 0.
Caso parab olico: Corresponde a un autovalor nulo: Det(A) = a
= 0.
En el caso general de n variables, las ecuaciones de segundo orden con coecientes reales
constantes se clasican de modo an alogo. La ecuaci on de segundo orden
n
i,j=1
A
ij
2
u
x
i
x
j
= 0 ,
con A
ij
= A
ji
, puede escribirse en forma matricial como
D
t
AD = 0 ,
con la extensi on evidente de la notaci on anterior. La ecuaci on se dice de tipo elptico si
los autovalores de A son todos no nulos y del mismo signo, de tipo hiperb olico si son
no nulos y todos del mismo signo excepto uno, de tipo ultrahiperb olico cuando son todos
no nulos, con p de ellos de un signo y n p de signo opuesto (p, n p > 1), y de tipo
parab olico cuando existe al menos un autovalor nulo. Notemos que la clasicaci on dada
sigue siendo v alida, aun cuando a, b, c, d, e, f no sean constantes. En este caso, la ecuaci on
puede cambiar de tipo en distintas regiones del plano. Por ejemplo, y
2
2
u
x
2
+2x
2
u
xy
+
2
u
y
2
=
0 es elptica cuando y
2
x
2
> 0, parab olica para x
2
= y
2
e hiperb olica en la regi on
y
2
x
2
< 0.
Finalmente, consideremos la ecuaci on lineal homog enea de segundo orden en dos varia-
bles con coecientes constantes completa:
a
2
u
x
2
+ 2b
2
u
xy
+ c
2
u
y
2
+d
u
x
+ e
u
y
+ fu = 0 .
La misma puede escribirse en forma matricial simetrizada como
D
t
ADu +
1
2
(B
t
D + D
t
B)u +fu = 0 ,
con B = (
d
e
), B
t
= (d, e). Si Det[A] ,= 0 (casos hiperb olico o elptico), podemos reescri-
birla en la forma
(D
t
C
t
)A(D C)u +f
u = 0 ,
donde C =
1
2
A
1
B = (
c
x
c
y
), f
= f C
t
AC. En estos casos, el reemplazo
u(x, y) = e
c
x
x+c
y
y
w(x, y)
186
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
permite escribir (DC)u = e
c
x
x+c
y
y
Dw y (D
t
C
t
)e
c
x
x+c
y
y
ADw = e
c
x
x+c
y
y
D
t
ADw,
lo cual nos conduce a
D
t
ADw +f
w = 0,
es decir, a una ecuaci on sin t erminos en derivadas primeras, para w. Esto no es siempre
posible en el caso parab olico.
El mismo tratamiento puede aplicarse al caso de n variables independientes.
V.3. El m etodo de separaci on de variables
V.3.1. Consideraciones generales
Es el m etodo adecuado para resolver ecuaciones diferenciales lineales en derivadas
parciales, cuando involucran sumas de operadores diferenciales en distintas variables y
regiones geom etricas de tipo rectangular en dichas variables.
Consideremos una ecuaci on diferencial para una funci on inc ognita u(x, y) de la forma
L
x
(u) + L
y
(u) = 0, (x, y) R, (V.3.1)
donde:
I) L
x
es un operador diferencial lineal que depende s olo de la variable independiente x,
tal como
2
x
2
o
L
x
=
x
(p(x)
x
) +q(x) , (V.3.2)
y an alogamente, L
y
es un operador diferencial lineal que depende s olo de la variable
independiente y, tal como
2
y
2
, o
y
, o tambi en de la forma (V.3.2).
II) R es una regi on producto en las variables x, y:
R = R
x
R
y
, (V.3.3)
con R
x
= [a, b], R
y
= [c, d], es decir, un rect angulo
a x b, c y d , (V.3.4)
donde, en general, a, b, c, d pueden ser nitos o tambi en innitos.
El ejemplo tpico de (V.3.1) es la ecuaci on de Laplace en coordenadas cartesianas para
una regi on rectangular,
2
u
x
2
+
2
u
y
2
= 0, a x b, c y d . (V.3.5)
El m etodo consiste en ensayar una soluci on producto de la forma
u(x, y) = X(x)Y (y) , (V.3.6)
187
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
donde X(x) es funci on de x solamente e Y (y) funci on de y solamente. Reemplazando en
(V.3.1) obtenemos
L
x
[X(x)]Y (y) + X(x)L
y
[Y (y)] = 0 (V.3.7)
y por lo tanto, asumiendo X(x)Y (y) ,= 0 y dividiendo por X(x)Y (y),
L
x
(X(x)]
X(x)
+
L
y
[Y (y)]
Y (y)
= 0 , (V.3.8)
es decir,
L
x
(X(x)]
X(x)
=
L
y
[Y (y)]
Y (y)
. (V.3.9)
Como cada fracci on depende s olo de una de las variables independientes, y queremos que
la igualdad anterior se satisfaga (x, y) R, la unica posibilidad es que ambos cocientes
sean constantes, es decir, independientes de x y de y:
L
x
(X(x)]
X(x)
=
L
y
[Y (y)]
Y (y)
= k . (V.3.10)
Esto implica las ecuaciones
L
x
[X(x)] = kX(x), L
y
[Y (y)] = kY (y) , (V.3.11)
con lo cual hemos reducido el problema original a dos ecuaciones diferenciales ordinarias
que dependen de una constante, hasta ahora arbitraria, k. Denominando X
k
(x), Y
k
(y) a
las soluciones generales de las ecuaciones anteriores, obtenemos una soluci on producto
X
k
(x)Y
k
(y) de (V.3.1).
Es importante destacar que no estamos diciendo que la soluci on de (V.3.1) es nece-
sariamente un producto, sino que admite soluciones producto. Dado que la ecuaci on di-
ferencial es lineal, podemos luego plantear una soluci on m as general como combinaci on
lineal de productos:
u(x, y) =
k
c
k
X
k
(x)Y
k
(y) (V.3.12)
que, obviamente, no ser a en general un productof(x)g(y).
Los posibles valores de k quedan determinados por las condiciones de contorno del
problema, y es aqu donde comienza a desempe nar un papel fundamental el hecho de que
R sea una regi on producto. Por ejemplo, supongamos que requerimos una soluci on de
(V.3.1) que satisfaga la condici on de contorno
u(a, y) = 0, u(b, y) = 0, y [c, d] . (V.3.13)
188
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
Esto implica, para la soluci on producto, que X(a) = X(b) = 0. La primera de las ecua-
ciones (V.3.11) se transforma entonces en una ecuaci on de autovalores para el operador
L
x
, con las condiciones de contorno anteriores:
L
x
(X) = kX, X(a) = X(b) = 0 , (V.3.14)
de la que se buscan, obviamente, soluciones no triviales. Si L
x
es de la forma (V.3.2),
(V.3.14) es la ecuaci on de autovalores para el operador de Sturm-Liouville L
x
con las
condiciones de contorno homog eneas X(a) = X(b) = 0 (para las cuales L
x
es autoad-
junto). En general, para esta o cualquier otra condici on de contorno para la cual L
x
resulte
un operador de Sturm-Liouville autoadjunto, sabemos que la ecuaci on (V.3.14) conduce
a
k =
x
n
, X(x) = X
n
(x), n = 1, 2, 3, . . . (V.3.15)
donde
x
n
denota el en esimo autovalor de L
x
con la condici on de contorno dada, y X
n
(x)
la correspondiente autofunci on. Una vez obtenido
x
n
, se procede a resolver la segunda
ecuaci on de (V.3.11),
L
y
(Y ) =
x
n
Y (V.3.16)
la cual no es una ecuaci on de autovalores, pues
x
n
est a ya determinado. Si L
y
es un
operador diferencial que involucra hasta derivadas segundas, la soluci on Y
n
(y) de esta
ecuaci on tendr a dos constantes arbitrarias. Si y representa una posici on, una de ellas puede
utilizarse para satisfacer una condici on de contorno en otro de los bordes, tal como
Y (d) = 0 ,
(o Y () acotada si d ), lo cual deja libre una constante c
n
. De esta forma, obtene-
mos las soluciones producto
u
n
(x, y) = c
n
X
n
(x)Y
n
(y) ,
y podemos plantear una soluci on m as general de la forma
u(x, y) =
n
c
n
X
n
(x)Y
n
(y) . (V.3.17)
Las constantes c
n
pueden, nalmente, obtenerse a partir de una condici on de contorno no
homog ena en el borde restante, tal como u(x, c) = f(x), obteni endose la condici on
u(x, c) =
n
c
n
X
n
(x)Y
n
(c) = f(x) . (V.3.18)
Esta ultima ecuaci on corresponde al desarrollo en autofunciones de L
x
de la funci on f(x).
Por completitud del conjunto de autofunciones, sabemos que tal desarrollo es posible para
189
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
cualquier f(x) que satisfaga f(a) = f(b) = 0, si Y
n
(c) ,= 0 n. Por la ortogonalidad de
las X
n
(x) (
_
b
a
X
n
(x)X
n
(x)dx = N(n)
nn
para L
x
autodajunto), obtenemos entonces
c
n
Y
n
(c) =
_
b
a
X
n
(x)f(x)dx
_
b
a
X
n
(x)X
n
(x)dx
(V.3.19)
de donde se obtiene c
n
. Si el problema original contena datos no homog eneos en ambas
fronteras, tal como u(x, c) = f(x), u(x, d) = h(x), se puede proceder en forma similar,
planteando la soluci on como suma de aquella para u(x, c) = f(x), u(x, d) = 0 y aque-
lla para u(x, c) = 0, u(x, d) = h(x), o bien determinando las dos constantes de Y
n
(y)
simult aneamente con las anteriores condiciones. Para otras condiciones de contorno para
las que L
x
sea autoadjunto, se procede en forma similar, como se detalla en las secciones
siguientes.
Si, en cambio, y representa una variable temporal, es decir y t, y si L
y
L
t
involucra hasta derivadas segundas, las dos constantes arbitrarias de Y
n
(t) pueden deter-
minarse a partir de las condiciones iniciales u(x, t
0
) = f(x), u
t
(x, t
0
) = h(x), donde
u
t
(x, t
0
) =
u
t
[
t=t
0
, que nuevamente conducen, utilizando (V.3.17) para y = t
0
, al desa-
rrollo de f(x) y h(x) en las autofunciones de L
x
(los detalles se dan en las secciones
siguientes). An alogamente, si L
t
contiene s olo derivadas de primer orden en t, Y
n
(t) con-
tendr a una constante arbitraria, que se podr a determinar de la condici on u(x, t
0
) = f(x).
Los resultados anteriores sugieren que el m etodo de separaci on de variables es su-
ciente para proporcionar la soluci on del problema planteado bajo las condiciones previas.
Esto es, efectivamente, as. Podemos arribar a este m etodo desde otro punto de vista,
planteando un desarrollo de la soluci on u(x, y) en autofunciones X
n
(x) de L
x
con la
correspondiente condici on de contorno:
u(x, y) =
n
c
n
(y)X
n
(x) , (V.3.20)
donde, en principio, c
n
(y) =
b
a
X
n
(x)u(x,y)dx
b
a
X
n
(x)X
n
(x)dx
. No obstante, si (V.3.20) debe ser soluci on
de (V.3.1) y la convergencia es uniforme, entonces, reemplazando en (V.3.1),
0 =
x
n
c
n
(y) + L
y
[c
n
(y)]X
n
(x) ,
lo que implica, dada la ortogonalidad de las X
n
(x), que L
y
[c
n
(y)] =
x
n
c
n
(y), es decir,
c
n
(y) Y
n
(y). Vemos, pues, que si bien una soluci on producto es una soluci on muy
particular de (V.3.1), la soluci on general (con condiciones de contorno que hagan a L
x
un
operador de Sturm-Liouville autoadjunto) puede expresarse como una suma (o serie) de
soluciones producto.
Es evidente que, si las condiciones de contorno homog eneas est an dadas sobre la va-
riable y en lugar de x, con L
y
autoadjunto con tales condiciones, se procede en forma
similar (y x). Y si y representa en realidad a un conjunto de variables independientes
distintas de x, se procede tambi en en forma an aloga, realizando luego una nueva separa-
ci on de variables en la ecuaci on L
y
(Y ) =
x
n
Y , en caso de ser esto posible.
190
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
Observaciones:
1) si L
x
1
(x)
L
x
, con L
x
un operador de Sturm Liouville y (x) > 0 para x (a, b),
entonces la ecuaci on de autovalores resultante,
L
x
(X) = k(x)X(x) ,
contiene una funci on de peso (x). Nada cambia formalmente en las expresiones ante-
riores (aunque los autovalores y autofunciones s cambian y las condiciones de contorno
deben ser las adecuadas), salvo que la ortogonalidad es ahora con peso (x), por lo que
se debe incluir (x) en las integrales (V.3.19).
2) Las expresiones anteriores pueden extenderse a un intervalo R
x
innito o semi-
innito (por ejemplo, b ), si L
x
y las condiciones de contorno son adecuadas, pero
en tal caso n pasar a a un ndice continuo (n k), con las autofunciones satisfaciendo la
ortogonalidad
_
xR
x
X
k
(x)X
k
(x)dx = N(k)(k k
). El procedimiento resulta equiva-
lente a resolver el problema por medio de una transformaci on adecuada (transformada de
Fourier, etc.), como se ver a en las secciones siguientes.
3) Si Y
n
(c) = 0 para alg un n, la expansi on (V.3.18) puede no ser factible para algunas
f(x) (las que contengan una componente no nula en la direcci on de la X
n
(x) corres-
pondiente). Pero esto no es un defecto del m etodo de separaci on de variables, sino del
problema planteado: En estos casos el operador L
x
+ L
y
resulta singular (posee un auto-
valor 0) y no existe necesariamente soluci on del problema planteado si f(x) es general.
Los ejemplos especcos que desarrollaremos en detalle en las pr oximas secciones, y que
son todos de la forma (V.3.1), son:
1) La ecuaci on de Laplace (V.3.5) en coordenadas cartesianas para una regi on rectangular,
y su extensi on a regiones producto tridimensionales o n-dimensionales.
2) La ecuaci on de Laplace en coordenadas polares para en un sector circular,
2
u
r
2
+
1
r
u
r
+
1
r
2
2
u
2
= 0, a r b, 0
m
,
con a 0. Si bien no es directamente de la forma (V.3.1), puede ser llevada inmediata-
mente a dicha forma multiplic andola por r
2
. Es interesante observar que, si 0 < 2,
la mera continuidad de la soluci on y su derivada implica condiciones de contorno pe-
ri odicas en . Si u(r, ) = R(r)(), la correspondiente ecuaci on L
() = k es una
ecuaci on de autovalores para L
2
(con condiciones de contorno peri odicas), que
implica k =
n
= n
2
, con n entero y
n
() = e
in
. En tal caso, L
r
[R(r)] = n
2
R(r)
no es una ecuaci on de autovalores. Los detalles se dar an en las secciones siguientes.
En forma similar se trata la ecuaci on de Laplace en un sector esf erico a < r < b,
1
2
, 0
m
.
3) La ecuaci on de ondas unidimensional
2
u
x
2
1
v
2
2
u
t
2
= 0, a x b, t 0 ,
191
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
4) la ecuaci on de difusi on unidimensional,
2
u
x
2
u
t
= 0 .
Estas ecuaciones ser an estudiadas en las secciones siguientes, al igual que sus extensiones
a dos y tres dimensiones en geometras tipo producto en variables cartesianas o polares.
V.3.2. Autovalores y autofunciones de L
x
+ L
y
Consideremos ahora el problema de autovalores en dos dimensiones,
(L
x
+L
y
)(u) = u, (x, y) R
x
R
y
, (V.3.21)
con una cierta condici on de contorno en el borde que haga a L
x
+ L
y
autoadjunto, tal
como
u(a, y) = u(b, y) = 0, u(x, c) = u(x, d) = 0 . (V.3.22)
El problema tpico es el de los autovalores del Laplaciano en un rect angulo, u = u,
(x, y) R
x
R
y
, o sea,
(
2
u
x
2
+
2
u
y
2
) = u, (x, y) R
x
R
y
. (V.3.23)
Escribiendo (V.3.21) como (L
x
+L
y
)u = 0, podemos aplicar el m etodo de separaci on
de variables, que conduce a las ecuaciones
L
x
(X) = kX, X(a) = X(b) = 0, (V.3.24)
L
y
(Y ) = ( k)Y, Y (c) = Y (d) = 0 . (V.3.25)
Las ecuaciones (V.3.25) son ambas ecuaciones de autovalores para L
x
y L
y
(pues no
est a determinado), por lo que
k =
x
n
, X(x) = X
n
(x), n = 1, 2, 3, . . . , (V.3.26)
k =
y
m
, Y (y) = Y
m
(y), m = 1, 2, 3, . . . . (V.3.27)
Esto implica =
nm
, con
nm
=
x
n
+
y
m
, (V.3.28)
u
nm
(x, y) = X
n
(x)Y
m
(y) . (V.3.29)
Los autovalores de L
x
+L
y
en una regi on producto son, entonces, la suma de los autova-
lores de L
x
y L
y
, mientras que las correspondientes autofunciones son el producto de las
autofunciones de L
x
y L
y
.
192
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
Puede demostrarse que toda autofunci on de L
x
+L
y
en una regi on producto es, o bien
un producto de autofunciones de L
x
y L
y
(autofunci on producto), o bien una combinacion
lineal de autofunciones producto asociadas al mismo autovalor (cuando la dimensi on del
espacio propio es mayor que uno). Efectivamente, de existir una autofunci on no producto
con autovalor distinto de los correspondientes a las que s lo son, debera ser ortogonal
a toda autofunci on producto, por ser las autofunciones de un operador autoadjunto orto-
gonales, pero toda funci on u(x, y) en R
x
R
y
que satisfaga las condiciones de contorno
puede desarrollarse como suma o serie de autofunciones producto: Como y [c, d],
u(x, y) =
n
c
n
(y)X
n
(x), c
n
(y) =
_
b
a
X
n
(x)u(x, y)dx
_
b
a
X
n
(x)X
n
(x)dx
, (V.3.30)
y, adem as,
c
n
(y)=
m
c
nm
Y
m
(y), c
nm
=
_
d
c
Y
m
(y)C
n
(y)dy
_
b
a
Y
m
(y)Y
m
(y)dy
, (V.3.31)
entonces
u(x, y) =
n,m
c
nm
X
n
(x)Y
m
(y), c
nm
=
_
b
a
_
d
c
X
n
(x)Y
m
(y)u(x, y)dxdy
_
b
a
X
n
(x)X
n
(x)dx
_
d
c
Y
m
(y)Y
m
(y)dy
.(V.3.32)
Una funci on ortogonal a todo producto, derivable y que satisfaga las condiciones de con-
torno debe, por lo tanto, ser nula (c
nm
= 0 n, m).
Por otra parte, si se tiene una autofunci on no producto cuyo autovalor coincide con
alguno de los autovalores asociados con las autofunciones que s lo son, nuestro razona-
miento anterior muestra que la misma (ortogonal a todas las tipo producto que corres-
ponden a autovalores distintos al propio) debe, necesariamente, ser combinaci on lineal
de aqu ellas tipo producto con las cuales comparte autovalor y, por lo tanto, linealmen-
te dependiente. El conjunto ortogonal de todas las autofunciones producto u
nm
(x, y) =
X
n
(x)Y
m
(y) es, entonces, completo en R
x
R
y
.
Ejemplos especcos ser an desarrollados en las secciones siguientes.
V.3.3. Autovalores y autofunciones de
1
(x)
L
x
+ g(x)L
y
Consideremos, ahora, un problema de autovalores m as general,
(
1
(x)
L
x
+g(x)L
y
)(u) = u, (x, y) R
x
R
y
, (V.3.33)
donde L
x
y L
y
son operadores diferenciales del tipo de Sturm-Liouville en las variables
x e y respectivamente.
Esta ecuaci on surge, por ejemplo, al considerar el problema de autovalores del Lapla-
ciano en una regi on circular u(r, ) = u(r, ), (r, ) R
r
R
. M as precisamente,
(
2
u
r
2
+
1
r
u
r
+
1
r
2
2
u
2
) = u, a r b, 0
m
, (V.3.34)
193
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
que puede escribirse en la forma (V.3.33):
(
1
r
r
(r
u
r
) +
1
r
2
2
u
2
) = u, (r, ) R
r
R
. (V.3.35)
Como condiciones de contorno podemos considerar, por ejemplo, que u se anule en los
bordes (si a > 0,
m
< 2). Si, en cambio, la regi on es un anillo (a > 0,
m
= 2), deben
imponerse condiciones de contorno peri odicas en y locales en r = a, b. Finalmente, si
la regi on es todo el disco (a = 0,
m
= 2), deben imponerse condiciones peri odicas en
, locales en r = b y u acotada para r 0 si a = 0, como se discuti o anteriormente.
Volviendo a (V.3.33), por simplicidad de notaci on consideraremos en lo que sigue
que u se anula en el borde, con R = R
x
R
y
y R
x
= [a, b], R
y
= [c, d]. Planteando
nuevamente en (V.3.33) una soluci on producto u(x, y) = X(x)Y (y), se obtiene
1
(x)
L
x
[X(x)]Y (y) +g(x)X(x)L
y
[Y (y)] = X(x)Y (y), (V.3.36)
y, por lo tanto, dividiendo por g(x)X(x)Y (y),
1
g(x)
1
(x)
L
x
[X(x)]
X(x)
+
L
y
[Y (y)]
Y (y)
= 0 , (V.3.37)
es decir,
L
y
[Y (y)]
Y (y)
=
1
g(x)
1
(x)
L
x
[X(x)]
X(x)
= k , (V.3.38)
con k constante. Esto conduce a las ecuaciones
L
y
[Y (y)] = kY (y), Y (c) = Y (d) = 0 , (V.3.39)
L
x
[X(x)] + k(x)g(x)X(x) = (x)X(x) , X(a) = X(b) = 0 . (V.3.40)
La primera de estas ecuaciones es una ecuaci on de autovalores est andar para L
y
, por lo
que
k =
y
m
, Y (y) = Y
m
(y) , m = 1, 2, 3, . . . (V.3.41)
con
y
m
e Y
m
(y) los autovalores y autofunciones de L
y
con la condici on de contorno dada.
La segunda ecuaci on la podemos ahora reescribir como
L
m
x
[X(x)] = (x)X(x) , X(a) = X(b) = 0 , (V.3.42)
que es una ecuaci on de autovalores con peso (x) para el operador
L
m
x
= L
x
+
y
m
g(x)(x) , (V.3.43)
donde el suprandice m indica que depende de
y
m
. Entonces
=
m
n
, X(x) = X
m
n
(x), n = 1, 2, 3 . . . (V.3.44)
194
V.3 EL M
ETODO DE SEPARACI
ON DE VARIABLES
donde
m
n
, X
m
n
(x), son los autovalores y autofunciones de L
m
x
, identicando m el auto-
valor correspondiente de L
y
.
Los autovalores ya no son la suma de los autovalores de L
x
y L
y
, pero las autofuncio-
nes contin uan siendo el producto de dos autofunciones, una de L
y
y otra de L
m
x
con peso
(x):
[
1
(x)
L
x
+ g(x)L
y
]u
nm
=
m
n
u
nm
, u
nm
(x, y) = X
m
n
(x)Y
m
(y) . (V.3.45)
Por ejemplo, en el caso de la ecuaci on (V.3.35) para 0 < < 2 y 0 r b, con
u(b, ) = 0, la ecuaci on (V.3.39) resulta
2
= k (V.3.46)
que, junto con las condiciones de contorno peri odicas, implica () e
i
, con k =
2
y entero. La ecuaci on (V.3.42) es, entonces,
r
(r
R
r
) +
2
r
R = rR, (V.3.47)
que es una ecuaci on de autovalores para el operador de Sturm-Liouville L
r
=
r
(r
r
)+
2
r
con peso r. Esta ecuaci on puede escribirse como
R
+
R
r
+ (
2
r
2
)R = 0 ,
que es una ecuaci on de Bessel. Para 0 r b, ya sabemos (ver captulo III) que la unica
soluci on acotada de esta ecuaci on es proporcional a
R
(r) = J
||
(
r) , (V.3.48)
con J
la funci on de Bessel de primera especie. La condici on de contorno R(b) = 0
implica entonces
= k
n
/b, con k
n
el m- esimo 0 de la funci on de Bessel J
, > 0
(J
(k
n
) = 0). Por lo tanto, los autovalores y autofunciones del Laplaciano en la regi on
0 r b, 0 < 2, son
n
= (k
n
)
2
/b
2
, u
n
(r, ) = J
||
(k
n
r/b)e
i
, (V.3.49)
existiendo dos autofunciones linealmente independientes por cada autovalor si ,= 0
( = [[).
Tanto este caso como el caso de las autofunciones del Laplaciano en regiones cilndri-
cas y esf ericas se tratar an con mayor detalle en las secciones siguientes.
195
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
j
u
j1
u
j
u
j1
xh x xh
x
u
Figura 26: Esquema discreto para derivar la ecuaci on de ondas en una dimensi on.
V.4. Ondas en una dimensi on espacial
V.4.1. Generalidades
El ejemplo m as importante de ecuaci on de tipo hiperb olico es la ecuaci on de ondas.
Empecemos estudiando el caso de una dimensi on espacial, considerando la propagaci on
de las ondas que se producen en una cuerda vibrante homog enea. La ecuaci on que gobier-
na la deformaci on de la cuerda vibrante sin forzado externo puede deducirse [9] conside-
rando un conjunto de partculas de masa m = h, unidas por tramos, de longitud h, de
una cuerda con masa despreciable, sometida a tensi on constante T. Llamaremos u
j
(t) al
desplazamiento vertical de la j esima partcula, medido a partir de su posici on de equi-
librio y
j
al angulo que forma con el eje x positivo el segmento de cuerda que une las
partculas j esima y j + 1 esima (ver gura 26). Entonces, usando la segunda ley de
Newton tendremos, para deformaciones peque nas:
sin
j
tan
j
u
j+1
(t) u
j
(t)
h
.
Por lo tanto, las componentes de la tensi on sobre la j esima partcula son:
T
V
= T sin
j
T sin
j1
T
u
j+1
(t) 2u
j
(t) + u
j1
(t)
h
, T
H
0
y la ecuaci on de Newton se escribe:
u
j
(t)
T
u
j+1
(t) 2u
j
(t) + u
j1
(t)
h
2
.
Si, ahora, tomamos el lmite h 0 y m 0, con constante, el n umero de partculas
tiende a innito y, al mismo tiempo, el ndice j se transforma en una variable continua x,
196
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
de modo que el sistema de ecuaciones ordinarias se transforma en la siguiente ecuaci on
diferencial:
u
tt
v
2
u
xx
= 0 , (V.4.1)
donde los subndices indican derivadas parciales y v =
_
T/ es la velocidad de propa-
gaci on, con la densidad lineal de masa (constante) y T la tensi on. En caso de existir
una fuerza externa que act ua sobre la carga, se obtendr a la correspondiente ecuaci on in-
homog enea, con inhomogeneidad igual a la fuerza externa por unidad de longitud de la
cuerda.
Mencionemos, tambi en, que la ecuaci on de ondas (V.4.1) puede obtenerse a partir de
la densidad lagrangiana
L =
1
2
(u
2
t
v
2
u
2
x
) .
Las correspondientes ecuaciones de movimiento,
t
L
u
t
+
x
L
u
x
= 0 conducen inmedia-
tamente a u
tt
v
2
u
xx
= 0 (ver VI.2).
V.4.2. Soluci on de DAlembert para la cuerda innita
Antes de analizar los casos con condiciones de contorno, resolveremos la ecuaci on de
onda para una cuerda innita. En este caso, como veremos, basta con establecer las condi-
ciones iniciales para encontrar la soluci on, tanto de la ecuaci on homog enea o libre como
de la ecuaci on inhomog enea o forzada. Dado que se trata de una ecuaci on diferencial de
segundo orden en t, el proceso de determinar su soluci on requiere dos integraciones y, por
lo tanto, es necesario el conocimiento de dos condiciones iniciales (perles iniciales de
deformaci on y de velocidades). Comencemos por el problema homog eneo y determine-
mos su soluci on, conocida como soluci on de DAlembert. Como hemos visto, dado que
(V.4.1) es una ecuaci on hiperb olica, su soluci on general tiene la forma
u(x, t) = f(x vt) + g(x + vt) , (V.4.2)
lo que representa una onda f(x vt) propag andose hacia valores crecientes de x con
velocidad v (onda progresiva) y otra, g(x +vt), propag andose hacia valores decrecientes
de x con velocidad v (onda regresiva). El primer t ermino es constante a lo largo de las
rectas caractersticas x vt = c
1
y el segundo lo es a lo largo de las rectas caractersticas
x + vt = c
2
.
Dado que u(x, t) tiene la forma (V.4.2), las condiciones iniciales (deformaci on y ve-
locidad iniciales de cada punto de la cuerda) implican
u(x, 0) = (x) = f(x) +g(x) ,
u
t
(x, 0) = (x) = v[g
(x) f
(x)]
y podemos determinar las funciones f y g como
f(x) =
1
2
[(x) (x)/v] ,
197
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
Figura 27: La deformaci on u como funci on de x y t para deformaci on inicial (x) =
(1 [x[)H(1 [x[) y perl inicial de velocidades (x) = 0, v = 1.
g(x) =
1
2
[(x) + (x)/v] ,
donde (x) =
_
x
x
0
(x
)dx
es una primitiva de (x). Teniendo en cuenta que (x +
vt) (x vt) =
_
x+vt
xvt
(x
)dx
, se encuentra que la soluci on est a dada por
u(x, t) =
1
2
[(x vt) +(x + vt)] +
1
2v
_
x+vt
xvt
(x
)dx
, (V.4.3)
que se conoce como la soluci on de D Alembert. La forma inicial (x) se separa, entonces,
en dos pulsos
1
2
(xvt) que viajan en sentidos opuestos, mientras que la velocidad inicial
origina dos pulsos de distinto signo
1
2v
(xvt), tambi en viajando en sentidos opuestos.
Partiendo la integral en forma adecuada, es f acil vericar que la soluci on de DAlembert
respeta (obviamente, pues as la dedujimos) la forma general (suma de ondas progresiva
y regresiva) de la ecuaci on V.4.2.
V.4.2.1. Soluci on fundamental para la cuerda innita
Es interesante observar que la soluci on de DAlembert tambi en puede expresarse en
la forma
u(x, t) =
_
[K
t
(x x
, t)(x
) + K(x x
, t)(x
)]dx
, (V.4.4)
donde
K(x x
, t) =
1
2v
[H(x x
+vt) H(x x
vt)] (V.4.5)
198
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
Figura 28: La deformaci on u como funci on de x y t, para deformaci on inicial (x) = 0 y
perl inicial de velocidades (x) = H(1 [x[), v = 1.
es la soluci on de la ecuaci on homog enea
K
tt
(x x
, t) v
2
K
xx
(x x
, t) = 0 (V.4.6)
correspondiente a las condiciones iniciales K(xx
, 0) = 0 y K
t
(xx
, 0) = (xx
).
K(x x
, t) se denomina soluci on fundamental y, a veces, funci on respuesta. Depende,
en el caso de una cuerda innita, s olo de la diferencia x x
, debido a la invariancia
traslacional. Para t > 0, K(x, t) = 1/(2v) en el cono del futuro (la regi on [x[ vt),
anul andose fuera del mismo, mientras que para t < 0, K(x, t) = 1/(2v) en el cono del
pasado ([x[ vt), anul andose tambi en fuera del mismo.
Para t > 0, K(xx
, t) es, por lo tanto, no nula (e igual a 1/(2v)) s olo en el intervalo
[x x
[ < vt, mientras que K
t
(x x
, t) = ((x x
+ vt) + (x x
vt))/2. Para
t > 0, los datos iniciales que se encuentran fuera del cono del pasado del punto (x, t) no
afectan, en consecuencia, el valor de u(x, t).
La ecuaci on (V.4.4) muestra que la soluci on para las condiciones iniciales u(x, 0) =
0 x, u
t
(x, 0) = (x) es la convoluci on, en la variable x, de la soluci on fundamental con
(x). Por su parte, la soluci on correspondiente a u(x, 0) = (x), u
t
(x, 0) = 0 x es la
convoluci on de K
t
con (x). En efecto, es directo mostrar que, dado que K(x x
, t)
satisface la ecuaci on homog enea (V.4.6), K
t
(x x
, t) tambi en la satisface. Adem as, la
segunda condici on inicial satisfecha por K(x x
, 0) muestra que su derivada temporal
satisface la condici on de tener una deformaci on inicial igual a la delta de Dirac. En cuanto
a su perl inicial de velocidades, de la ecuaci on diferencial (V.4.6) se tiene que K
tt
(x
x
, 0) = v
2
K
xx
(x x
, 0) = 0, debido a que K es id enticamente nula para t = 0.
Notemos, tambi en, que la soluci on para u(x, 0) = (x) y u
t
(x, 0) = 0 x puede ob-
tenerse por convoluci on de (x) con K
t
(x x
, t) y, por lo tanto, es la derivada temporal
de la soluci on correspondiente a u(x, 0) = 0 x y u
t
(x, 0) = (x), lo que puede veri-
carse directamente. Finalmente, la propiedad de superposici on implica que la soluci on de
199
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
(x',t')
tt'(xx')fv tt'(xx')fv
x
t
(x,t)
t't(x'x)fv
t't(x'x)fv
x'
t'
Figura 29: Izquierda: El cono del pasado y el cono del futuro respecto de un punto (x
, t
)
en el plano (x, t). Ambos forman el soporte de K(x x
, t t
), mientras que s olo el
cono del futuro es el soporte de G(xx
, t t
). Derecha: El cono del pasado de un punto
(x, t) en el plano (x
, t
), que es el soporte de G(x x
, t t
).
la ecuaci on homog enea, con ambas condiciones iniciales no nulas, es la suma de las dos
anteriores.
V.4.2.2. Ecuaci on inhomog enea. Funci on de Green causal para la cuerda innita
Consideremos ahora el problema de las vibraciones forzadas de una cuerda. En este
caso, tendremos:
u
tt
v
2
u
xx
= f(x, t) , (V.4.7)
con f(x, t) = F(x, t)/, siendo F(x, t) la fuerza externa aplicada por unidad de lon-
gitud. Entonces (suponiendo que u
x
y u
t
se anulan para x ) tenemos dE/dt =
_
u
t
F(x, t)dx, donde la integral representa la potencia aplicada.
La soluci on de (V.4.7) puede obtenerse por distintos m etodos. Consideraremos aqu uni-
camente el m etodo basado en la funci on de Green causal. Denimos la funci on de Green
causal como
G(x, t) K(x, t)H(t) , (V.4.8)
donde H(t) es la funci on de Heaviside. Puede vericar el lector que G(x x
, t t
)
satisface la ecuaci on
G
tt
(x x
, t t
) v
2
G
xx
(x x
, t t
) = (t t
)(x x
) , (V.4.9)
dado que K
tt
v
2
K
xx
= 0 y K(x, t)(t) = K(x, 0)(t) = 0. Entonces, G(x x
, t t
)
representa la respuesta del sistema a una fuerza impulsiva en el punto x
y en el instante
t
, estando el sistema en reposo para t < t
. Depende s olo de xx
debido a la invariancia
200
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
traslacional. Adem as, G(x x
, t t
) = G(x
x, t
t) ya que, siendo autoadjunto
el operador en derivadas parciales, se satisface la propiedad de reciprocidad, de modo
totalmente an alogo al ya discutido en el contexto de problemas de Sturm-Liouville. Como
funci on de x, t, G(x, t) es no nula (e igual a 1/(2v)) s olo en el cono del futuro del punto
(x
, t
) ([xx
[ v(tt
)) mientras que, como funci on de x
, t
, es no nula s olo en el cono
del pasado del punto (x, t) ([x
x[ v(t t
)). La soluci on de la ecuaci on inhomog enea
(V.4.7), suponiendo que el sistema est a en reposo para t = y teniendo en cuenta
la linealidad de la ecuaci on y el hecho de que podemos descomponer f(x, t) como una
integral de fuerzas impulsivas (f(x, t) =
_
f(x
, t
)(x x
)(t t
)dx
dt
), es
u(x, t) =
_
G(x x
, t t
)f(x
, t
)dx
dt
, (V.4.10)
donde el integrando es, por supuesto, no nulo s olo en el cono del pasado del punto (x, t).
Esta doble convoluci on de la funci on de Green causal con la inhomogeneidad se conoce
como f ormula de Duhamel.
Problema sugerido V.4.1 Vericar, utilizando la linealidad de la ecuaci on que, efec-
tivamente, la expresi on anterior para u(x, t) satisface la ecuaci on (V.4.7).
La soluci on general de la ecuaci on
u
tt
v
2
u
xx
= f(x, t) ,
con f(x, t) = 0 para t < 0 y las condiciones iniciales u(x, 0) = (x), u
t
(x, 0) = (x),
puede entonces escribirse, para t > 0, como
u(x, t) =
_
[K
t
(x x
, t)(x
) + K(x x
, t)(x
)] dx
+
_
G(x x
, t t
)f(x
, t
)dx
dt
, (V.4.11)
donde hemos utilizado la propiedad de superposici on, derivada de la linealidad de la ecua-
ci on diferencial.
Como ejemplo simple, si f(x, t) = cH(t) (fuerza constante para t > 0) y (x) 0,
(x) 0, se obtiene, para t > 0,
u(x, t) =
c
2v
_
t
0
dt
_
x+vt
xvt
dx
= ct
2
/2 ,
resultado que corresponde a una aceleraci on constante de los puntos de la cuerda.
V.4.3. Cuerda semi-innita con extremo jo
Analicemos ahora el comportamiento de una cuerda semi-innita con origen en x = 0.
Supondremos, primero, que la cuerda se encuentra ja en ese extremo, lo que implica
201
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
la condici on de contorno u(0, t) = 0 t. Consideremos, en primer lugar, la ecuaci on
diferencial homog enea (f(x, t) = 0) con condiciones iniciales u(x, 0) = (x), u
t
(x, 0) =
(x), donde y est an denidas para x 0. Debemos, entonces, encontrar la soluci on
al problema
u
tt
v
2
u
xx
= 0 , (V.4.12)
u(x, 0) = (x) , (V.4.13)
u
t
(x, 0) = (x) , (V.4.14)
para x 0, con la condici on de contorno
u(0, t) = 0 t 0 . (V.4.15)
Podemos utilizar la soluci on de DAlembert que hemos estudiado antes, extendiendo
en forma cticia la cuerda a todos los valores de x y considerando, despu es, s olo la solu-
ci on en la regi on fsica x 0, a condici on de garantizar el cumplimiento de la condici on
de contorno extendiendo adecuadamente las funciones (x) y (x), que s olo est an de-
nidas para x 0, a la regi on no fsica x < 0. Es un caso particular del llamado m etodo
de las im agenes, de amplia aplicaci on en la resoluci on de problemas con condiciones de
contorno. Veremos a continuaci on que la forma adecuada de garantizar el cumplimiento
de la presente condici on de contorno consiste en extender ambas funciones que determi-
nan las condiciones iniciales como funciones impares de x. En efecto, la soluci on a la
ecuaci on diferencial tiene la forma
u(x, t) = f(x vt) + g(x + vt), x 0 .
La condici on de contorno implica
u(0, t) = f(vt) + g(vt) = 0, t 0
o, equivalentemente,
f() = g(), 0 . (V.4.16)
Usando este resultado, resulta para la deformaci on inicial
u(x, 0) = f(x) + g(x) = f(x) f(x) = (x), x 0 .
De esta ultima expresi on, evaluada en x, resulta
(x) = f(x) f(x) = (x) ,
lo cual muestra que, en efecto, la deformaci on inicial debe extenderse como impar a la
regi on no fsica.
En cuanto al perl inicial de velocidades,
u
t
(x, 0) = v(f
(x) g
(x)) = (x), x 0 .
202
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
Derivando la ecuaci on (V.4.16) resulta
f
() = g
(), x 0 .
Por lo tanto, tenemos
(x) = v(f
(x) f
(x)), x 0 .
En estas condiciones, (x) = v(f
(x) f
(x)) = (x), x 0, lo cual mues-
tra que tambi en el perl inicial de velocidades debe ser extendido en forma impar para
garantizar que se satisfaga la condici on de contorno de extremo jo a todo tiempo t 0.
Resumiendo: en este caso puede usarse, para x 0, la expresi on de DAlembert de
la soluci on para una cuerda innita, extendiendo ambas condiciones iniciales en forma
impar respecto de x = 0, es decir,
(x) = (x), (x) = (x) .
Es inmediato vericar que, entonces, la soluci on (V.4.3) satisface la condici on de
contorno adecuada. En efecto, utilizando el subndice I para denotar las respectivas ex-
tensiones impares de las condiciones iniciales, se tiene
u(0, t) =
1
2
[
I
(vt) +
I
(vt)] +
1
2v
_
vt
vt
I
(x
)dx
= 0, t 0 ,
donde hemos usado la denici on de funci on impar y que la integral de una funci on impar
sobre un intervalo sim etrico se anula.
La consecuencia fsica inmediata es que los pulsos se reejan en el origen con inver-
si on de signo, ya que el pulso que se propaga hacia la izquierda en la regi on fsica se
encuentra, al llegar al origen, con el pulso progresivo virtual, que proviene de x < 0
y que tiene el signo opuesto, el cual luego contin ua propag andose hacia la derecha en el
sector real.
La funci on respuesta correspondiente, denida para x 0, x
0, es
K
D
(x, x
, t) = K(x x
, t) K(x + x
, t)
y satisface
K
D
tt
(x, x
, t) v
2
K
D
xx
(x, x
, t) = 0 ,
K
D
(x, x
, 0) = 0, K
D
t
(x, x
, 0) = (x x
) , K
D
(0, x
, t) = 0 .
Representa la soluci on de la ecuaci on homog enea con las condiciones iniciales (x) = 0,
(x) = (xx
), que satisface la condici on de contorno K
f
(0, x
, t) = 0. Esta no es otra
cosa que la soluci on de la ecuaci on homog enea para la cuerda innita con las condiciones
iniciales (x) = 0 y (x) = (x x
) (x + x
). Notemos que K
D
(x, x
, t) ya no
203
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
3 2 1 1 2 3
x
1.0
0.5
0.5
1.0
(x)
Figura 30: Izquierda: La deformaci on de una cuerda semi-innita con extremo jo en
x = 0, como funci on de x y t, para deformaci on inicial triangular y perl inicial de
velocidades id enticamente nulo (con v = 1). Obs ervese la evoluci on de los frentes de
onda progresivo y regresivo en la regi on fsica, as como la reexi on con cambio de signo,
que ocurre a partir de t = 2. Derecha: La correspondiente extensi on impar de la condici on
inicial.
es funci on de (x x
), dado que se ha roto la invariancia traslacional. La soluci on nal
puede escribirse como
u(x, t) =
_
0
[K
D
t
(x, x
, t)(x
) + K
D
(x, x
, t)(x
)]dx
=
_
1
2
[(x vt) +(x + vt)] +
_
x+vt
xvt
(x
)dx
x vt
1
2
[(vt x) + (x + vt)] +
_
x+vt
vtx
(x
)dx
x < vt
.(V.4.17)
Del mismo modo, la soluci on de la ecuaci on inhomog enea u
tt
v
2
u
xx
= f(x, t)
puede hallarse extendiendo f(x, t) en forma impar para x < 0 (f(x, t) = f(x, t)) y
utilizando entonces la soluci on para la cuerda innita:
u(x, t) =
_
G(x x
, t t
)f(x
, t
)dx
dt
=
_
0
dx
G
D
(x, x
.t t
)f(x
, t
)dt
,
con
G
D
(x, x
, t) = K
D
(x, x
, t)H(t) = G(x x
, t) G(x + x
, t) (V.4.18)
la funci on de Green causal para la cuerda semi-innita, que satisface (para x > 0, x
> 0)
G
D
tt
(x, x
, t t
) v
2
G
D
xx
(x, x
, t t
) = (x x
)(t t
) ,
204
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
tft
0
0
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
2.75
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
0.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
3
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
1
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
3.25
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
1.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
3.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
2
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
4
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
2.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
4.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
Figura 31: Perl de una cuerda semi-innita con extremo jo para distintos tiempos. Aqu,
x
0
y t
0
son unidades de espacio y tiempo tales que vt
0
= x
0
.
205
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
con la condici on de contorno G
D
(0, x
, t t
) = 0 y la condici on inicial G
D
(x, x
, t
t
) = 0 para t < t
. Es f acil vericar, entonces, que u(x, t) es la soluci on particular de la
ecuaci on inhomog enea que satisace u(x, t) = 0 para t , con u(0, t) = 0 t.
Finalmente, discutamos el problema con condiciones de contorno inhomog eneas
u
tt
v
2
u
xx
= 0, u(0, t) = g(t) . (V.4.19)
Supondremos u(x, t) = 0, u
t
(x, t) = 0 y g(t) = 0 para t < 0, de modo que, para t 0,
la elongaci on se origine s olo por la condici on de contorno. Es f acil ver que la soluci on,
que tiene que ser de la forma (V.4.2), es sencillamente
u(x, t) = g(t x/v) , (V.4.20)
ya que satisface u
tt
v
2
u
xx
= 0 y la condici on de contorno. Las excitaciones en x = 0
se propagan hacia la derecha con velocidad v. Puede escribirse la soluci on tambi en en
t erminos de G
D
como
u(x, t) = v
2
_
G
D
x
(x, x
, t t
)[
x
=0
g(t
)dt
, (V.4.21)
dado que G
D
x
(x, x
, t)[
x
=0
= v
1
(x vt)H(t) (x > 0).
Debido a la linealidad, la soluci on general de la ecuaci on
u
tt
v
2
u
xx
= f(x, t)
con las condiciones iniciales u(x, 0) = (x), u
t
(x, 0) = (x), y la condici on de contorno
u(0, t) = g(t), suponiendo que tanto f como g se anulan para t < 0, puede escribirse
como
u(x, t) =
_
0
[G
D
t
(x, x
, t)(x
) + G
D
(x, x
, t)(x
)]dx
+
_
0
dx
_
0
dt
G
D
(x, x
, t t
)f(x
, t
) + g(t x/v) . (V.4.22)
V.4.4. Cuerda semi-innita con extremo libre
Pasemos ahora al caso de la cuerda con el extremo libre (u
x
(0, t) = 0, lo que impli-
ca que no existen fuerzas verticales en x = 0). En esta situaci on, puede procederse en
forma an aloga al caso de extremo jo, esta vez completando las condiciones iniciales (y
la inhomogeneidad, si la hubiese) en forma par con respecto a x = 0 ((x) = (x),
(x) = (x), f(x, t) = f(x, t)). En tal caso, la soluci on (V.4.3) implica
u
x
(0, t) =
1
2
[
(vt) +
(vt)] +
1
2v
[(vt) (vt)] = 0 .
206
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
3 2 1 1 2 3
x
1.0
0.5
0.5
1.0
(x)
Figura 32: Izquierda: La deformaci on u(x, t) en la regi on fsica para una cuerda semi-
innita con extremo libre, con deformaci on inicial triangular y perl inicial de velocidades
id enticamente nulo (v = 1). Pueden observarse la reexi on sin cambio de signo y el
comportamiento de la derivada con respecto a x en x = 0. Derecha: La correspondiente
extensi on par de la condici on inicial.
La consecuencia fsica es la reexi on de los pulsos, en el origen, sin cambio de signo.
La funci on respuesta correspondiente es
K
N
(x, x
, t) = K(x x
, t) + K(x +x
, t) (V.4.23)
y la funci on de Green causal es
G
N
(x, x
, t) = K
N
(x, x
, t)H(t) = G(x x
, t) +G(x +x
, t). (V.4.24)
Ambas satisfacen, de modo evidente, la condici on de contorno de anulaci on de su
derivada con respecto a x en x = 0.
V.4.5. Cuerda Finita: energa y condiciones de contorno
La energa de un segmento de cuerda x
1
x x
2
es
E
x
1
x
2
=
2
_
x
2
x
1
(u
2
t
+ v
2
u
2
x
)dx, (V.4.25)
donde el primer t ermino en el integrando representa la energa cin etica por unidad de
longitud y el segundo, la energa potencial el astica. La derivada temporal de la ecuaci on
anterior conduce a
dE
x
1
x
2
dt
=
_
x
2
x
1
(u
t
u
tt
+ v
2
u
x
u
xt
)dx
=
_
x
2
x
1
[u
t
(u
tt
v
2
u
xx
)]dx +v
2
u
x
u
t
[
x
2
x
1
, (V.4.26)
207
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
tft
0
0
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
2.75
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
0.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
3
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
1
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
3.25
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
1.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
3.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
2
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
4
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
2.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
tft
0
4.5
2 4 6 8
xfx
0
0.5
0
0.5
1
u(x,t)
Figura 33: Perl de una cuerda semi-innita con extremo libre para distintos tiempos.
Aqu x
0
y t
0
son unidades de espacio y tiempo tales que vt
0
= x
0
.
208
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
donde hemos efectuado una integraci on por partes. El primer t ermino del lado derecho de
la igualdad anterior se anula si u(x, t) es soluci on de la ecuaci on de ondas (homog enea),
mientras que el segundo t ermino representa el ujo de energa por unidad de tiempo (po-
tencia) a trav es de los bordes del segmento. El mismo es nulo si, en cada uno de los bordes
x = x
i
, i = 1, 2, se satisface la versi on homog enea (f(t) = 0 t, g(t) = 0 t) de alguna
de las dos primeras condiciones de contorno locales que se detallan a continuaci on:
1. Condiciones de contorno Dirichlet: posici on del extremo de la cuerda determinada
como funci on del tiempo: u(x = x
i
, t) = f(t). En particular, el caso homog eneo
f(t) = 0, t, representa la condici on de extremo jo u(x = x
i
, t) = 0.
2. Condiciones de contorno Neumann: tensi on en el extremo de la cuerda determinada
como funci on del tiempo: u
x
(x = x
i
, t) = g(t). En particular, el caso homog eneo
g(t) = 0, t, representa la condici on de extremo libre (ya que u
x
(x = x
i
, t) = 0
implica anulaci on de la componente vertical de la tensi on en el extremo).
3. Condiciones de contorno Robin: cierta combinaci on lineal de la deformaci on y su
derivada normal en el extremo conocida como funci on del tiempo: u
n
(x = x
i
, t) +
ku(x = x
i
, t) = h(t), con k > 0, donde n es la normal exterior (u
x
en x = x
2
y
u
x
en x = x
1
). El caso homog eneo de la presente ecuaci on representa el extremo
sujeto a una fuerza restauradora proporcional a la deformaci on.
Para cualquier combinaci on de las dos primeras condiciones antes enumeradas en
uno y otro extremos es posible demostrar, usando el car acter constante de la energa que
aparece en la ecuaci on (V.4.25), que la soluci on de la ecuaci on de ondas (tanto homog enea
como inhomog enea) en la regi on x
1
x x
2
, para determinadas condiciones iniciales
del tipo u(x, 0) = (x), u
t
(x, 0) = (x), es unica. En efecto, la diferencia w = u
1
u
2
entre dos posibles soluciones del mismo problema se anula inicialmente (w(x, 0) = 0,
w
t
(x, 0) = 0). Adem as, para condiciones de los dos primeros tipos, en los bordes satisface
w(x
i
, t) = 0, i = 1, 2 (o bien w
x
(x
i
, t) = 0, i = 1, 2, o condiciones de un tipo en
un extremo y de otro tipo en el otro extremo), por lo que su energa E
x
1
x
2
es constante
e igual a su valor inicial, que es nulo. Esto implica que w(x, t) es constante, es decir
w(x, t) 0 en virtud de la condiciones de contorno e iniciales que satisface.
En el caso de condiciones Robin , w(x, t) = u
1
(x, t) u
2
(x, t) est a sujeta a acopla-
miento el astico en el borde. Usando explcitamente las condiciones de contorno en ambos
extremos se tiene, de la ecuaci on (V.4.26),
dE
x
1
x
2
dt
=
kv
2
2
_
d
dt
[w(x
2
, t)]
2
+
d
dt
[w(x
1
, t)]
2
_
.
Integrando en la variable t se obtiene para la energa
E
x
1
x
2
(t) =
kv
2
2
_
[w(x
2
, t)]
2
+ [w(x
1
, t)]
2
0 ,
donde hemos usado que w(x, 0) = 0 x.
209
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
Por su parte, la ecuaci on (V.4.25) muestra que E
x
1
x
2
(t) 0. Por lo tanto, la energa
resulta id enticamente nula, lo cual conduce a w(x, t) id enticamente nula y, por ende, a la
unicidad de la soluci on.
V.4.6. Cuerda Finita: Resoluci on por Separaci on de Variables
El problema de una cuerda nita de longitud L, con condiciones de contorno ho-
mog eneas dadas en ambos extremos puede, en forma similar, resolverse mediante el m eto-
do de las im agenes. Por ejemplo, si ambos extremos est an jos, deber a garantizarse que
u(0, t) = u(L, t) = 0, t 0. Esto requiere que las funciones (x) y (x), dadas s olo
para 0 x L, sean extendidas como impares, tanto con respecto a x = 0 como con
respecto a x = L. Entonces, tendremos
(x) = (x) (x) = (2L x), x [0, L]
o, equivalentemente, (x) = (x) y (x) peri odica de perodo 2L. Lo mismo vale
para (x) y, eventualmente, para la inhomogeneidad. Sin embargo, la soluci on se obtiene
de modo m as directo utilizando el m etodo de separaci on de variables, que conduce a un
desarrollo de las soluciones en autofunciones de un operador de Sturm-Liouville (Ver
V.3).
Consideremos, nuevamente, la ecuaci on de ondas
2
u
t
2
= v
2
2
u
x
2
. (V.4.27)
Planteando una soluci on particular del tipo
u(x, t) = T(t)X(x)
se obtiene T
(t)X(x) = v
2
X
(x)T(t), es decir,
T
(t)
v
2
T(t)
=
X
(x)
X(x)
= k
2
,
donde k debe ser constante, losdado que los dos primeros miembros dependen unicamente
de t y x respectivamente. Se obtienen as las ecuaciones
X
= k
2
X,
T
= (vk)
2
T,
cuya soluci on general es
X(x) = Acos(kx) + Bsin(kx)
T(t) = a cos(vkt) + b sin(vkt) ,
si k ,= 0 y
X(x) = A + Bx, T(t) = a +bt ,
210
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
si k = 0. La soluci on para k ,= 0 puede escribirse como
u(x, t) = [Acos(kx)+Bsin(kx)][a cos(vkt)+b sin(vkt)]
=
1
2
[cos(kxvkt)(Aa+Bb)+cos(kx+vkt)(AaBb)
+sin(kxvkt)(BaAb) + sin(kx+vkt)(Ba+Aa)]
y se verica que es de la forma f(x vt) + g(x + vt). Lo mismo ocurre para k = 0, ya
que x =
1
2
((x +vt) + (x vt) y t =
1
2
((x +vt) (x vt))/v.
V.4.6.1. Cuerda nita con extremos jos
Consideremos, en particular, una cuerda nita de longitud L. Si los extremos est an
jos, tenemos la condici on de contorno
u(0, t) = u(L, t) = 0 . (V.4.28)
Como ya sabemos, bajo estas condiciones de contorno, no existe soluci on con k = 0.
Para k ,= 0, la condici on en el origen exige A = 0 y la condici on en x = L reduce a
Bsin(kL) = 0 ,
de donde, para B ,= 0,
k =
n
L
, n = 1, 2, . . .
Esto muestra que k es, efectivamente, real (no hay soluci on para k complejo), como co-
rresponde a un operador de Sturm-Liouville autoadjunto en la variable x. En efecto, los
valores de k
2
son precisamente los autovalores del operador de Sturm Liouville L =
d
2
dx
2
con la condici on de contorno (V.4.28), y
X(x) = Bsin(
n
L
x)
son las correspondientes autofunciones (recordemos que las correspondientes a autovalo-
res distintos son ortogonales:
_
L
0
sin(
n
L
x) sin(
m
L
x)dx =
L
2
nm
). Representan los modos
normales de vibraci on con la condici on de contorno (V.4.28). El n- esimo modo posee
n 1 nodos x
m
=
m
n
L, m = 1, . . . , n 1, en los que X(x
m
) = 0.
La soluci on particular producto es, pues, de la forma
u(x, t) = sin(
n
L
x)[a
n
cos(
nv
L
t) + b
n
sin(
nv
L
t)] (V.4.29)
= A
n
sin(
n
L
x) cos(
nv
L
t ), A
n
=
_
a
2
n
+b
2
n
,
con tan = b
n
/a
n
, que representa una onda estacionaria. Es la superposici on de ondas
sinusoidales de igual amplitud que se propagan en sentidos opuestos:
u(x, t) =
1
2
a
n
[sin[k
n
(x vt)] + sin[k
n
(x + vt)]]
+b
n
[cos[k
n
(x vt)] cos[k
n
(x + vt)]] ,
211
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
con k
n
= n/L, n = 1, 2, ..., .
N otese que, como indicaba nuestra discusi on sobre el m etodo de las im agenes, la
soluci on (V.4.29) es impar y peri odica de perodo 2L en la variable x.
La soluci on general de (V.4.27), en este caso, es de la forma
u(x, t) =
n=1
sin(
n
L
x)[a
n
cos(
nv
L
t) +b
n
sin(
nv
L
t)]. (V.4.30)
En efecto, si u(x, 0) = (x), u
t
(x, 0) = (x), entonces
(x) =
n=1
a
n
sin(
n
L
x) ,
(x) =
n=1
nv
L
b
n
sin(
n
L
x) ,
que representan el desarrollo de medio rango en serie de senos de (x) y (x). Por lo
tanto,
a
n
=
2
L
_
L
0
(x) sin(
n
L
x)dx,
b
n
=
2
nv
_
L
0
(x) sin(
n
L
x)dx.
Notemos, una vez m as, que la soluci on general (V.4.30) no es de la forma X(x)T(t), sino
una suma de soluciones producto.
Funci on respuesta. La funci on respuesta K(x, x
, t) es la soluci on para las condiciones
iniciales (x) = 0, (x) = (x x
). En este caso, se obtiene:
a
n
= 0, b
n
=
2
nv
sin(
n
L
x
) ,
de donde
K
DD
(x, x
, t) =
2
nv
n=1
sin(
n
L
x) sin(
n
L
x
) sin(
nv
L
t) .
La soluci on anterior para u(x, 0) = (x), u
t
(x, 0) = (x) puede, entonces, escribirse
como
u(x, t) =
_
L
0
K
DD
t
(x, x
, t)(x
)dx
+
_
L
0
K
DD
(x, x
, t)(x
)dx
, (V.4.31)
en forma similar al caso de la cuerda innita. Notar que, como en el caso de la cuer-
da semi-innita, K
DD
(x, x
, t) es funci on de x y x
separadamente, y no de x x
,
ya que se ha perdido la invariancia traslacional. Sin embargo, sigue cumpli endose que
K
DD
(x, x
, t) = K
DD
(x
, x, t), debido al car acter autoadjunto del operador de Sturm-
Liouville en la variable x.
212
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
Figura 34: Evoluci on de la elongaci on de una cuerda nita ja en los bordes para con-
dici on inicial u(x, 0) sin(x/L) + sin(2x/L), u
t
(x, 0) = 0. L es la longitud de la
cuerda y T el perodo del modo fundamental.
V.4.6.2. Cuerda nita con extremos libres
En este caso, la condici on de contorno es
u
x
(0, t) = u
x
(L, t) = 0 . (V.4.32)
Para k ,= 0, las condiciones de contorno implican B = 0 y la ecuaci on
Asin(kL) = 0 ,
de donde
k =
n
L
, n = 1, 2, . . . .
Por su parte, para k = 0 sobrevive el modo constante en x. Resumiendo, se tiene
k =
n
L
, n = 0, 2, . . . .
Esto muestra que k es, efectivamente, real, como corresponde a un operador de Sturm-
Liouville autoadjunto (no hay soluci on para k complejo). En efecto, los valores de k
2
son
los autovalores del operador de Sturm-Liouville L =
d
2
dx
2
con la condici on de contorno
(V.4.32), y
X(x) = Acos(
n
L
x)
son las correspondientes autofunciones. Poseen n nodos x
m
= (
1
2
+ m)L/n, m =
0, . . . , n 1, en los que X(x
m
) = 0. La soluci on particular para n ,= 0 es, pues,
u(x, t) = cos(
n
L
x)[a
n
cos(
nv
L
t) +b
n
sin(
nv
L
t)]
=
1
2
a
n
[cos[k
n
(x vt)] + cos[k
n
(x + vt)]]
+b
n
[sin[k
n
(x +vt)] sin[k
n
(x vt)]] ,
213
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
con k
n
= n/L. Si n = 0,
u(x, t) = a + bt .
La soluci on general es
u(x, t) =
1
2
(a
0
+ b
0
t) +
n=1
cos(
n
L
x)[a
n
cos(
nv
L
t) +b
n
sin(
nv
L
t)] . (V.4.33)
Se trata, en este caso, de una funci on par con respecto a x = 0 y peri odica con perodo
2L.
Si u(x, 0) = (x), u
t
(x, 0) = (x), entonces
(x) =
1
2
a
0
+
n=1
a
n
cos(
n
L
x) ,
(x) =
1
2
b
0
+
n=1
nv
L
b
n
cos(
n
L
x), ,
que representan el desarrollo de medio rango en serie de cosenos de (x) y (x). Por lo
tanto,
a
n
=
2
L
_
L
0
(x) cos(
n
L
x)dx
b
n
=
2
nv
_
L
0
(x) cos(
n
L
x)dx, b
0
=
2
L
_
L
0
(x)dx.
Funci on respuesta
La funci on respuesta K
NN
(x, x
, t) se obtiene para (x) = 0, (x) = (x x
):
a
n
= 0, b
0
=
2
L
, b
n
=
2
nv
cos(
n
L
x
) ,
de modo que
K
NN
(x, x
, t) =
t
L
+
2
nv
n=1
cos(
n
L
x) cos(
n
L
x
) sin(
nv
L
t) .
La soluci on anterior para u(x, 0) = (x), u
t
(x, 0) = (x) puede, nuevamente, escribirse
como en (V.4.31).
214
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
V.4.6.3. Funci on de Green causal para una cuerda nita
La soluci on de la ecuaci on inhomog enea
2
u
t
2
v
2
2
u
x
2
= f(x, t) , (V.4.34)
con u(x, t) = 0 antes de la acci on de la fuerza y u(0, t) = u(L, t) = 0, puede expresarse
como
u(x, t) =
_
L
0
dx
G
DD
(x, x
, t t
)f(x
, t
)dt
, (V.4.35)
donde
G
DD
(x, x
, t) = K
DD
(x, x
, t)H(t)
es la funci on de Green causal. Podemos llegar a este resultado directamente, notando que
G
DD
satisface la ecuaci on
G
DD
tt
(x, x
, t) v
2
G
DD
xx
(x, x
, t) = (x x
)(t)
para x, x
(0, L), conjuntamente con la condici on de contorno respectiva (G
DD
(0, x
, t) =
G
DD
(L, x
, t) = 0 para una cuerda nita con extremos jos).
El resultado (V.4.35) puede ser tambi en obtenido desarrollando f(x, t) y u(x, t) en
serie de Fourier con respecto a x. En el caso con extremos jos,
f(x, t) =
n=1
f
n
(t) sin(
n
L
x) ,
u(x, t) =
n=1
c
n
(t) sin(
n
L
x) , (V.4.36)
con
f
n
(t) =
2
L
_
L
0
f(x, t) sin(
n
L
x)dx,
c
n
(t) =
2
L
_
L
0
u(x, t) sin(
n
L
x)dx.
Obtenemos, tambi en,
u
tt
(x, t) =
n=1
c
n
(t) sin(
n
L
x) .
215
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
Adem as, si u
xx
(x, t) =
n=1
b
n
(t) sin(
n
L
x), entonces
b
n
(t) =
2
L
_
L
0
u
xx
(x, t) sin(
n
L
x)dx
=
2
L
u
x
(x, t) sin(
n
L
x)[
L
0
n
L
_
L
0
u
x
(x, t) cos(
n
L
x)dx
=
2
L
n
L
u(x, t) cos(
n
L
x)[
L
0
(
n
L
)
2
_
L
0
u(x, t) sin(
n
L
x)dx
=
2n
L
2
[u(0, t) (1)
n
u(L, t)] (
n
L
)
2
c
n
(t) . (V.4.37)
Por lo tanto, si u(x, t) satisface la condici on de contorno homog enea u(0, t) = u(L, t) =
0 b
n
(t) = (
n
L
)
2
c
n
(t), tal como se obtendra al derivar dos veces con respecto a x el
desarrollo (V.4.36).
Reemplazando estos resultados en (V.4.34) se obtiene, nalmente, una ecuaci on dife-
rencial ordinaria para c
n
(t),
d
2
c
n
dt
2
+ (
nv
L
)
2
c
n
= f
n
(t) ,
cuya soluci on es (recordar que la funci on de Green para esta ecuaci on es g(t) =
1
k
sin(kt)H(t),
con k =
nv
L
, que satisface g(0) = 0, g
(0) = 1)
c
n
(t) =
L
nv
_
sin[
nv
L
(t t
)]H(t t
)f
n
(t
)dt
=
2
nv
_
L
0
dx
dt
sin[
nv
L
(tt
)]H(tt
) sin(
n
L
x
)f(x
, t
) .
Por lo tanto,
u(x, t) =
n=1
c
n
(t) sin(
n
L
x) =
_
L
0
dx
dt
G
DD
(x, x
, t t
)f(x
, t
) . (V.4.38)
Problema sugerido V.4.2: Resolver el caso de la cuerda nita con extremos libres.
V.4.6.4. Condiciones de contorno inhomog eneas
Consideremos ahora la ecuaci on homog enea (V.4.27) con la condici on de contorno no
homog enea
u(0, t) =
0
(t), u(L, t) =
L
(t) . (V.4.39)
Si
0
(t) y
L
(t) son constantes o dependen, a lo sumo, linealmente de t el problema puede
resolverse trivialmente:
u
0
(x, t) =
0
(t) + x(
L
(t)
0
(t))/L
216
V.4 ONDAS EN UNA DIMENSI
ON ESPACIAL
es, en esta situaci on, una soluci on de (V.4.27) que satisface la condici on de contorno
(V.4.39). Por lo tanto, la soluci on general ser a u(x, t) = u
0
(x, t)+u
1
(x, t), donde u
1
(x, t)
es una soluci on de (V.4.27) que satisface la condici on de contorno homog enea (V.4.28).
Si la dependencia no es lineal en t o constante, podemos igualmente escribir u(x, t) =
u
0
(x, t) +u
1
(x, t), donde u
1
(x, t) satisfar a la condici on de contorno homog enea (V.4.28)
y la ecuaci on de onda inhomog enea (V.4.34), con f(x, t) =
2
u
0
(x,t)
t
2
. El problema puede
luego resolverse como en la secci on anterior utilizando la funci on de Green.
Otra forma de proceder es proponer, nuevamente, una expansi on (V.4.36) y utilizar el
resultado (V.4.37), donde aparecen naturalmente u(0, t), u(L, t). Se obtiene as
d
2
c
n
dt
2
+ (
nv
L
)
2
c
n
=
2nv
2
L
2
[
0
(t) (1)
n
L
(t)] ,
de donde
c
n
(t) =
2v
L
_
sin[
nv
L
(t t
)]H(t t
)[
0
(t
) (1)
n
L
(t
)]dt
.
Por lo tanto,
u(x, t) =
n=1
c
n
(t) sin(
n
L
x
= v
2
_
[G
DD
x
(x, L, t t
)
L
(t
) G
DD
x
(x, 0, t t
)
0
(t
)]dt
,(V.4.40)
donde G
DD
x
(x, x
0
, t)
x
G
DD
(x, x
, t)[
x
=x
0
. La soluci on queda, as, expresada direc-
tamente en t erminos de
0
(t),
L
(t), y las derivadas de la funci on de Green correspon-
diente a condiciones de contorno homog eneas del mismo tipo, evaluadas en los extremos.
V.4.6.5. Energa de la cuerda nita con extremos jos
Consideremos, por simplicidad, el caso de extremos jos. La energa del modo normal
(V.4.29) es
E =
2
_
L
0
[u
2
t
(x, t) + v
2
u
2
x
(x, t)]dx
=
2
A
2
n
(
nv
L
)
2
_
L
0
sin
2
(
n
L
x)dx =
1
2
[
1
2
L(
nv
L
)
2
A
2
n
] . (V.4.41)
El ultimo t ermino entre corchetes es la energa E
n
=
1
2
m
2
n
A
2
n
de un oscilador de ma-
sa m = L, frecuencia
n
= nv/L y amplitud A
n
. La energa del modo normal es,
entonces, la mitad de la energa del oscilador correspondiente con amplitud m axima A
n
(lograda en el punto medio entre dos nodos).
217
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
Debido a la ortogonalidad de los modos normales, la energa de la soluci on general
(V.4.30) de la ecuaci on homog enea (V.4.27) ser a
E =
1
4
n=1
L(
nv
L
)
2
A
2
n
=
1
4
m
n=1
2
n
A
2
n
. (V.4.42)
Problema sugerido V.4.3:
a) Probar el resultado anterior. b) Encontrar la expresi on de la energa para el caso de
extremos libres.
V.5. Difusi on en una dimensi on espacial
V.5.1. Generalidades
El ejemplo m as importante de ecuaci on parab olica es la llamada ecuaci on de difu-
si on. La necesidad de resolver esta ecuaci on surge en una gran variedad de situaciones
fsicas asociadas a fen omenos irreversibles que van desde la descripci on de los cambios
en concentraci on de una sustancia en soluci on hasta la evoluci on de la temperatura en
un material que conduce calor. Tomaremos este ultimo ejemplo como hilo conductor de
esta secci on. Si bien trataremos aqu el caso de una dimensi on espacial, resulta natural
empezar por derivar la ecuaci on en el caso general, que ser a luego retomado en la secci on
V.7.
Sea u(r, t) la temperatura de un material conductor con calor especco c en una
regi on simplemente conexa R con borde S. Teniendo en cuenta que el ujo de calor por
unidad de area a trav es de una supercie est a dado por la ley de Fourier: J = u(r, t),
la conservaci on del calor en presencia de una fuente de calor j(r, t) implica la ecuaci on
d
dt
_
R
cu(r, t)dV =
_
S
u(r, t) dA+
_
R
j(r, t)dV . (V.5.1)
A su vez, esta ecuaci on puede reescribirse, teniendo en cuenta el teorema de Green
(ver Ap endice B) y el hecho de que debe ser v alida para cualquier regi on interna R del
material, como la ecuaci on diferencial
u
t
(r, t) u(r, t) = f(r, t) ,
donde u
t
=
u
t
, =
2
x
2
+
2
y
2
+
2
z
2
es el Laplaciano y = /(c) > 0, f = j/(c). Esta
ecuaci on se denomina ecuaci on general de difusi on y es una ecuaci on diferencial lineal
de tipo parab olico. En ausencia de fuentes se obtiene la ecuaci on de difusi on homog enea
u
t
(r, t) u(r, t) = 0 .
Ambas ecuaciones son, obviamente, tambi en v alidas en un n umero n arbitrario de
dimensiones espaciales. Comenzaremos estudiando el caso de una dimensi on.
218
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
V.5.2. Evoluci on de la temperatura en una barra innita
Consideremos la ecuaci on
u
t
u
xx
= 0 , > 0 (V.5.2)
para la temperatura u(x, t) en una barra innita con la condici on inicial
u(x, 0) = (x) . (V.5.3)
Obs ervese que, a diferencia de lo que ocurre en el caso de las vibraciones de una cuer-
da, aqu tenemos una ecuaci on de primer orden en derivadas temporales y, por lo tanto,
basta especicar s olo una condici on inicial para realizar su integraci on. Por supuesto, en el
caso de barras semi-innitas o nitas ser an necesarias, adem as, condiciones de contorno.
Multiplicando la ecuaci on (V.5.2) por e
ikx
e integrando con respecto a x, se obtiene
U
t
(k, t) + k
2
U(k, t) = 0 , (V.5.4)
donde
U(k, t) =
1
2
_
e
ikx
u(x, t)dx
es la transformada de Fourier (TF) de u(x, t) respecto de x. La ecuaci on (V.5.4) es una
ecuaci on diferencial ordinaria en t para U, cuya soluci on para t > 0 es
U(k, t) = e
k
2
t
U(k, 0) , (V.5.5)
donde U(k, 0) es la TF de u(x, 0).
Utilizando, ahora, las propiedades de la TF (ver IV) obtenemos, luego de efectuar la
transformaci on inversa,
u(x, t) =
1
2
_
e
ikx
U(k, t)dk
=
_
K(x x
, t)u(x
, 0)dx
, (V.5.6)
con
K(x, t) =
1
2
_
e
ikx
e
k
2
t
2
dk
=
e
x
2
/(4t)
4t
, t > 0 . (V.5.7)
K(x x
, t) es la funci on respuesta o n ucleo de la ecuaci on de difusi on del calor en la
barra innita y representa la temperatura u(x, t) en la posici on x y tiempo t > 0 para una
temperatura inicial u(x, 0) = (x x
), localizada en x = x
:
K
t
(x x
, t) K
xx
(x x
, t) = 0 ,
lm
t0
+
K(x x
, t) = (x x
) . (V.5.8)
219
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
En el caso de la barra innita, en que no existen puntos singularizados por la im-
posici on de condiciones de contorno, el n ucleo de la ecuaci on de calor depende s olo
de la diferencia x x
ya que, en este caso, la ecuaci on (V.5.2) es invariante frente a
traslaciones espaciales. La soluci on general (V.5.6) puede entenderse, entonces, como la
suma de soluciones elementales K(x x
, t) moduladas por el factor u(x
, 0), dado que
u(x, 0) =
_
(x x
)u(x
, 0)dx
.
K(x x
, t) es una Gaussiana centrada en x = x
con desviaci on est andar (t) =
2t. Dado que la cantidad total de calor debe conservarse e, inicialmente,
_
(x x
)dx = 1, se cumple que
_
K(x, t)dx = 1
t 0, como puede vericarse directamente. Al aumentar t, la distribuci on K(x, t)
se achata, aunque conserva su area. Para x ,= 0 jo, K(x, t) posee un m aximo en
t
0
= x
2
/(2), con K(x, t
0
) = 1/(
2ex), disminuyendo luego como t
1/2
para t .
Notemos tambi en que, si t > 0, K(x, t) ,= 0 x ,= 0, lo que indica una velocidad
innita de transmisi on del calor. La ecuaci on (V.5.2) es claramente no relativista, es decir
no invariante frente a transformaciones de Lorentz (en contraposici on con la ecuaci on de
ondas). No obstante, K(x, t) es muy peque no para x (t).
Problema sugerido V.5.1: Elaborar una simulaci on computacional que haga visible
el comportamiento de K(x, t) que acaba de describirse.
Ejemplo V.5.1: Si u(x, 0) = Acos(kx) = ARe[e
ikx
]
u(x, t) = ARe[e
ikx
e
k
2
t
] = Acos(kx)e
k
2
t
,
resultado que puede obtenerse de (V.5.6)(V.5.7) o directamente de (V.5.5), planteando
u(x, t) = e
ikx
U(k, t). La soluci on general (V.5.6) es, pues, la suma de soluciones ele-
mentales para condiciones iniciales u(x, 0) = U(k, 0)e
ikx
. Este ejemplo muestra tambi en
que oscilaciones espaciales iniciales de la temperatura decaen tanto m as r apidamente al
aumentar t cuanto mayor sea la frecuencia k. Si k = 0, u(x, t) = A, constante.
Ejemplo V.5.2: Si u(x, 0) = Ae
x
2
/r
/
r, r > 0 (distribuci on inicial gaussiana de
temperaturas)
u(x, t) = A
e
x
2
/(r+4t)
_
(r + 4t)
= AK(x, t + t
0
) , t
0
=
r
4
,
lo que puede obtenerse de (V.5.6) o, directamente, notando que u(x, 0) = AK(x, t
0
).
La distribuci on de temperaturas permanece gaussiana t > 0. Si r 0
+
, u(x, t)
AK(x, t).
220
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
0.1
1
10
6 4 2 0 2 4 6
xx
0
0.2
0.4
0.6
0.8
uT
0
0
1
2
0 2 4 6 8 10
tt
0
0.0
0.2
0.4
0.6
0.8
uT
0
Figura 35: Gr aco de la funci on respuesta K(x, t) de la ecuaci on de difusi on en la barra
innita (t
0
y x
0
son unidades tales que t
0
/x
2
0
= 1 y T
0
es la unidad de temperatura.).
Abajo se muestran los perles en funci on de x/x
0
para tiempos jos t/t
0
= 0,1, 1 y 10, y
en funci on de t/t
0
para posiciones jas x/x
0
= 0, 1, 2.
0.1
1
10
6 4 2 0 2 4 6
xx
0
0.2
0.4
0.6
0.8
uT
0
Figura 36: Perl de la temperatura u(x, t) en la barra innita para temperatura inicial
u(x, 0) = (x 2x
0
) + (x + 2x
0
) a tiempos t/t
0
= 0,1, 1 y 10. Se observa que las
irregularidades iniciales son fuertemente atenuadas al aumentar el tiempo, no quedando
pr acticamente indicios del doble pico inicial para tiempos grandes t/t
0
1.
221
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
V.5.3. Ecuaci on inhomog enea. Funci on de Green.
Consideremos, ahora, la ecuaci on inhomog enea
u
t
u
xx
= f(x, t) .
La misma representa la distribuci on de temperaturas en una barra cuando existe una
fuente externa que aporta una cantidad de calor cf(x, t) por unidad de tiempo, donde
es la densidad de la barra y c su conductividad.
Procediendo como en el caso anterior, es decir, multiplicando por e
ikx
e integrando,
obtenemos,
U
t
(k, t) + k
2
U(k, t) = F(k, t) ,
con F(k, t) la TF de f(x, t) con respecto a x. La soluci on de esta ecuaci on diferencial
ordinaria en t es, para U(k, ) = 0,
U(k, t) =
_
e
k
2
(tt
)
H(t t
)F(k, t
)dt
.
Aplicando, ahora, la transformada inversa se obtiene
u(x, t) =
_
G(x x
, t t
)f(x
, t
)dx
dt
, (V.5.9)
donde
G(x, t) = K(x, t)H(t) =
e
x
2
/(4t)
4t
H(t) . (V.5.10)
La funci on G(xx
, tt
) es la funci on de Green de la ecuaci on del calor y representa
la soluci on causal u(x, t) para una inhomogeneidad puntual f(x, t) = (x x
)(t t
):
G
t
(x x
, t t
) G
xx
(x x
, t t
) = (x x
)(t t
) ,
como puede comprobarse directamente utilizando (V.5.8) o (V.5.6).
La soluci on general (V.5.9) puede, nuevamente, entenderse como la suma de las solu-
ciones elementales G(x x
, t t
) moduladas por el factor f(x
, t
), dado que f(x, t) =
_
f(x
, t
)(x x
)(t t
)dt
dx
.
V.5.4. Barra semi-innita con condici on de contorno homog enea
Consideremos, ahora, el caso de una barra semi-innita cuyo extremo se mantiene
a temperatura nula a todo tiempo. Si la barra se extiende a los valores de x dados por
0 x < , deberemos resolver la ecuaci on (V.5.2) en la region x 0 con la condici on
inicial (V.5.3) y la condici on de contorno
u(0, t) = 0, t > 0. (V.5.11)
222
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
Podramos proceder como en el caso anterior, utilizando la transformada seno en lu-
gar de la TF completa. No obstante, es equivalente, pero m as c omodo y fsico, utilizar el
m etodo de las im agenes. La condici on (V.5.11) se puede simular completando la tempe-
ratura inicial u(x, 0) = (x) en forma impar para x < 0: u(x, 0) = u(x, 0). En esta
situaci on, utilizando la soluci on (V.5.6),
u(0, t) =
_
K(0 x
, t)u(x
, 0)dx
= 0 ,
por ser u(x
, 0) impar y K(x
, t) = K(x
, t) par (con respecto a x
). Obtenemos, enton-
ces,
u(x, t) =
_
K(x x
, t)u(x
, 0)dx
=
_
0
K
D
(x, x
, t)u(x
, 0)dx
, (V.5.12)
K
D
(x, x
, t) = K(x x
, t) K(x + x
, t) , (V.5.13)
donde K
D
(x x
, t) es la funci on respuesta para la barra semi-innita con la presente
condici on de contorno. Esta ultima no es otra cosa que la diferencia de las respuestas
a fuentes puntuales en x
y en x
. Notemos que K
D
(x, x
, t) no es m as una funci on de
xx
, ya que se ha perdido la invariancia traslacional. Tampoco se conserva la cantidad de
calor Q(x
, t)
_
K
D
(x, x
, t)dx, ya que el sistema pierde calor en x = 0. Tenemos,
en cambio, Q(x
, t) 0 para t , como puede comprobarse f acilmente.
En forma an aloga se procede para el caso inhomog eneo. Completando a f(x, t) en
forma impar con respecto a x = 0 t se obtiene
u(x, t) =
_
__
0
G
D
(x, x
, t t
)f(x
, t
)dx
_
dt
, (V.5.14)
con
G
D
(x, x
, t) = K
D
(x, x
, t)H(t) = G(x x
, t) G(x + x
, t) ,
que representa la diferencia de las respuestas del sistema a inhomogeneidades puntuales
en (x
, t
) y en (x
, t
). Aqu, K
D
y G
D
quedan denidas por
K
D
t
(x, x
, t) K
D
xx
(x, x
, t) = 0, x > 0, x
> 0, t > 0
lm
t0
+
K
D
(x, x
, t) = (x x
), K
D
(0, x
, t) = 0 (V.5.15)
G
Dt
(x, x
, t) G
D
xx
(x, x
, t) = (x x
)(t t
), x > 0, x
> 0
G
D
(0, x
, t) = 0 .
En forma similar se puede tratar la condici on de contorno de Neumann
u
x
(0, t) = 0 ,
223
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
que corresponde a una barra t ermicamente aislada en x = 0. En este caso, se debe com-
pletar la condici on inicial y la inhomogeneidad en forma par con respecto a x = 0:
u(x, 0) = u(x, 0), f(x, t) = f(x, t). Las soluciones se encuentran como en el caso
anterior, reemplazando K
D
(x, x
, t) y G
D
(x, x
, t) por
K
N
(x, x
, t) = K(x x
, t) + K(x + x
, t)
G
N
(x, x
, t) = K
N
(x, x
, t)H(t) = G(x x
, t) + G(x + x
, t) ,
que representan ahora la suma de las respuestas a fuentes puntuales en en x
y en x
y que satisfacen las mismas ecuaciones anteriores pero con la condici on de contorno
K
N
x
(0, x
, t) = 0, G
N
x
(0, x
, t) = 0. No son funciones de x x
, aunque en este ca-
so se verica
_
0
K
N
(x, x
, t)dx = 1 ,
t 0, ya que el sistema est a aislado.
Problema sugerido V.5.2: Probar el resultado anterior.
V.5.5. Barra semi-innita con condiciones de contorno inhomog eneas
V.5.5.1. Soluci on general
Resulta de gran inter es fsico resolver el problema de la determinaci on de la tempera-
tura en una barra semi-innita conociendo la temperatura en el origen como funci on del
tiempo. Deberemos resolver, en este caso,
u
t
u
xx
= f(x, t) ,
u(x, 0) = 0 , 0 x < ,
u(0, t) = g(t) t > 0 . (V.5.16)
N otese que, por continuidad, g(0) = 0. Nos limitaremos a considerar el caso de la
ecuaci on homog enea, con distribuci on inicial de temperaturas nula. La linealidad de la
ecuaci on diferencial, junto con la de las condiciones complementarias, nos permite hacer-
lo. Gracias a la validez de la propiedad de superposici on, el problema completo se obtiene
sumando al que trataremos aqu otros que ya hemos estudiado.
La inhomogeneidad en las condiciones de contorno puede ser trasladada, tambi en
gracias a la propiedad de superposici on, a la ecuaci on diferencial, deniendo:
u(x, t) = w(x, t) +v(x, t) ,
de donde resulta que la funci on v(x, t) satisface:
v
t
v
xx
= [w
t
(x, t) w
xx
(x, t)] ,
v(x, 0) = w(x, 0) + u(x, 0) = w(x, 0) , 0 x < ,
v(0, t) = g(t) w(0, t) , t > 0 . (V.5.17)
224
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
En el p arrafo anterior, w(x, t) es una funci on completamente arbitraria. Sin embargo,
podemos elegirla como
w(x, t) = g(t) .
De este modo, v(x, t) satisfar a la condici on de contorno homog enea en x = 0, que sabe-
mos resolver. Notar que, en el caso particular de g(t) = T constante, lo que hemos hecho
se reduce a separar la soluci on estacionaria, constante en toda la barra. Volviendo al caso
general, sabemos que, en estas condiciones tenemos:
v
t
v
xx
=
g(t) ,
v(x, 0) = 0 , 0 x < ,
v(0, t) = 0 t > 0 . (V.5.18)
Por lo tanto, usando la funci on de Green causal, se tiene
v(x, t) =
_
t
0
_
0
dx
dt
K
D
(x, x
; t t
) g(t
)
=
_
0
dx
g(t
)K
D
(x, x
; t t
)
t
=t
t
=0
+
_
t
0
_
0
dx
dt
K
D
(x, x
; t t
)
t
g(t
)
=
_
0
dx
g(t
) [(x x
) (x + x
)] +
_
t
0
_
0
dx
dt
K
D
(x, x
; t t
)
t
g(t
) ,
donde hemos integrado por partes. Ahora, teniendo en cuenta que la segunda delta de
Dirac est a evaluada en un punto exterior a su soporte, se verica:
v(x, t) = g(t) +
_
t
0
_
0
dx
dt
K
D
(x, x
, t t
)
t
g(t
) . (V.5.19)
Volviendo a la determinaci on de u(x, t), tenemos:
u(x, t) =
_
t
0
_
0
dx
dt
K
D
(x, x, t t
)
t
g(t
) . (V.5.20)
Utilizando la ecuaci on que satisface el n ucleo de calor, que
K
D
(x,x,tt
)
t
=
K
D
(x,x,tt
)
t
y que
2
K
D
x
2
=
2
K
D
x
2
, encontramos, nalmente:
u(x, t) =
_
t
0
dt
g(t
)
K
D
(x; t t
)
x
= 2
_
t
0
dt
g(t
)
K(x; t t
)
x
, (V.5.21)
donde K
D
(x; tt
) es el n ucleo de calor de una barra semi-innita sujeta, en sus extremos,
a la correspondiente condici on de contorno homog enea y K(x; tt
) es el n ucleo de calor
de una barra innita.
Se ve de la ultima expresi on que la respuesta a una condici on de contorno impulsiva
u(0, t) = (t) es proporcional a la derivada del n ucleo de calor con respecto a la variable
x.
225
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
V.5.5.2. Problemas sin condici on inicial y propagaci on de variaciones peri odicas de
temperatura en un extremo
Un problema interesante por sus aplicaciones es el de una barra semi-innita con
dada temperatura en su extremo, cuando se la estudia a un tiempo sucientemente grande
con respecto al inicial (tiempo t
0
en que se inici o el proceso de difusi on). En este caso,
puede reemplazarse la condici on inicial por la condici on de acotaci on y tener en cuenta
s olo el efecto de la condici on de contorno. Un ejemplo de aplicaci on de este caso es la
determinaci on del potencial en una lnea de transmisi on con p erdidas [17]. Otro, es la
determinaci on de la temperatura por debajo de la supercie terrestre a una profundidad x,
conociendo la temperatura en la supercie. Consideremos la ecuaci on
u
t
u
xx
= 0, x > 0 , (V.5.22)
con la condici on de acotaci on [u(x, t)[ < C
1
para x y [u(x, t)[ < C
2
para t
y la condici on de contorno
u(0, t) = g(t) ,
donde g(t) permanece, tambi en, acotada cuando t . Sabemos, en base a lo estu-
diado hasta ahora, que la soluci on, v alida para todo t t
0
est a dada por
u(x, t) =
_
0
dx
(x
)K
D
(x
; t t
0
) 2
_
t
t
0
dt
g(t
)
K(x
;tt
)
x
=
= I
1
+ I
2
, (V.5.23)
donde (x) es la distribuci on inicial de temperatura en la barra. Nos interesa el lmite
en el cual t
0
de esta soluci on. Es f acil ver que, si se cumplen las condiciones
de acotaci on, la primera integral (que llamaremos I
1
) 0 en dicho mite. En efecto, se
cumple
[I
1
[ < C
1
_
0
dx
t t
0
_
[e
(xx
)
2
4(tt
0
)
e
(x+x
)
2
4(tt
0
)
[
_
=
2C
1
_ x
4(tt
0
)
0
dze
z
2
,
donde hemos hecho un cambio de variable conveniente en la integral.
Dado que esta ultima integral tiende a cero cuando t
0
, la contribuci on de I
1
se anula en ese lmite. En el mismo lmite, la soluci on (V.5.23) se reduce a
u(x, t) = 2
_
t
dt
g(t
)
K
D
(x; t t
)
x
= 2
_
t
dt
g(t
)
k(x; t t
)
x
. (V.5.24)
A continuaci on, analizaremos otras dos formas alternativas de obtener este mismo
resultado. Consideremos, primero, el caso m as simple en que
g(t) = T
0
cos(t) = T
0
Re[e
it
] .
226
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
Proponiendo una soluci on del tipo
u(x, t) = T
0
e
it
v(x)
se encuentra que v(x) satisface
iv v
= 0 ,
cuya soluci on es
v(x) = A
1
e
i/x
+ A
2
e
i/x
,
con
_
i/ = e
i/4
_
/ = (1 +i)
_
2
. La condici on [v()[ < implica
v(x) =
_
A
2
e
x(1+i)()
> 0
A
1
e
x(1i)()
< 0
, () =
_
[[
2
. (V.5.25)
Por lo tanto, si > 0, la soluci on que satisface la condici on de contorno es
u(x, t) = T
0
e
x()(1+i)+it
, (V.5.26)
con
Re[u(x, t)] = T
0
e
()x
cos(t ()x) , (V.5.27)
que indica una disminuci on exponencial de las oscilaciones t ermicas que ocurren en la su-
percie (ver Figura 36). La longitud de penetraci on d() = 1/() =
_
2/ disminuye
al aumentar . Surge, adem as, un retraso t = x()/ = x/
2 en las oscilaciones a
una profundidad x, que corresponde a una velocidad de propagaci on
2. Notemos
nalmente que, si = 0, u(x, t) = G (soluci on estacionaria constante).
La soluci on general para una condici on de contorno arbitraria puede hallarse como
suma de las soluciones anteriores, desarrollando a g(t) = u(0, t) en integral de Fourier:
g(t) =
1
2
_
G()e
it
d, G() =
1
2
_
g(t)e
it
dt .
Efectuando la TF de la ecuaci on (V.5.22) con respecto a t, se obtiene
iU(x, ) U
xx
(x, ) = 0 , (V.5.28)
con
U(x, ) =
1
2
_
u(x, t)e
it
dt
la TF de u(x, t) respecto de t, que satisface U(0, ) = G(). La soluci on de (V.5.28)
acotada para x es, utilizando (V.5.25),
U(x, ) = G()e
x()(1+iSg())
,
227
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
Figura 37: Perl de la temperatura u(x, t) en una barra semi-innita con la condici on de
contorno u(0, t) = T
0
cos(t), para =
0
= 2/t
0
(izquierda) y =
0
/2 (derecha),
(con x
0
tal que t
0
/x
2
0
= 1). Se observa que las variaciones de temperatura en la supercie
disminuyen exponencialmente con la profundidad x. Al disminuir la frecuencia, aumenta
tanto la longitud de penetraci on como el retraso de la oscilaci on a una cierta profundidad
x ja.
donde Sg() es el signo de . Antitransformando esta ecuaci on, se obtiene
u(x, t) =
1
2
_
U(x, )e
it
d
=
_
G
DI
(x, t t
)g(t
)dt
, (V.5.29)
G
DI
(x, t) =
1
2
_
e
x()(1+iSg())+it
2
d
=
x
t
e
x
2
/(4t)
4t
H(t) . (V.5.30)
G
DI
(x, t t
) representa la soluci on para la condici on de borde puntual u(0, t) =
(t t
) y depende de la diferencia t t
. Para t > 0, G
DI
(x, t) posee, como funci on de
x, un m aximo en x
0
=
2t, con G
DI
(x
0
, t) = 1/(
2et).
Notemos que
G
DI
(x, t) =
G
D
(x, x
, t)
x
[
x
=0
= 2
G(x, t)
x
, (V.5.31)
y que (V.5.29) coincide con la expresi on antes obtenida en (V.5.24).
Resoluci on por transformada seno (TS):
Otra forma de llegar al mismo resultado es mediante la TS en la variable x. En primer
228
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
lugar, para una funci on f con f() = 0, obtenemos, integrando por partes dos veces,
_
0
f
(x) sin(kx) dx = f
(x) sin(kx)[
0
k
_
0
f
(x) cos(kx)dx
= kf(0) cos(kx)[
0
k
2
_
0
f(x) sin(kx)dx.
Por lo tanto, si F
s
(k) es la TS de f(x), la TS de f
(x) es
_
2
_
0
f
(x) sin(kx)dx =
_
2
kf(0) k
2
F
s
(k) .
Si f(0) = 0, que es la condici on de contorno natural para el desarrollo en las funciones
sin(kx), el resultado es simplemente k
2
F
s
(k), y puede obtenerse directamente derivan-
do la expresi on inversa
f(x) =
_
2
_
0
F
s
(k) sin(kx)dk .
Pero, si f(0) ,= 0, aparece un t ermino adicional. Por lo tanto, si efectuamos la TS de la
ecuaci on (V.5.22) (es decir, si multiplicamos por sin(kx) e integramos), obtenemos
U
s t
(k, t) + k
2
U
s
(k, t) =
_
2
kg(t) , (V.5.32)
donde g(t) = u(0, t) y
U
s
(x, t) =
_
2
_
0
u(x, t) sin(kx)dx
es la TS de u(x, t) con respecto a x. Si U
s
(k, ) = 0, la soluci on de (V.5.32) es
U
s
(k, t) =
_
2
k
_
e
k
2
(tt
)
H(t t
)g(t
)dt
.
Efectuando la transformaci on inversa, y notando que
2
_
0
e
k
2
t
k sin(kx)dk =
x
1
e
k
2
t
e
ikx
dk
= 2
x
e
x
2
/(4t)
4t
(V.5.33)
se obtiene nuevamente el resultado (V.5.23) o, equivalentemente, (V.5.29).
Problema sugerido V.5.3: Encontrar la soluci on correspondiente a un ujo dado
u
x
(0, t) = g(t) en el origen, utilizando la transformada coseno F
c
(k) (ver tabla siguiente).
f(x) F
s
(k) F
c
(k)
1 f
(x) kF
c
(k)
_
2
f(0) + kF
s
(k)
2 f
(x)
_
2
kf(0) k
2
F
s
(k)
_
2
(0) k
2
F
c
(k)
229
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
V.5.6. Teorema del m aximo y condiciones de contorno en barras de
longitud nita
Comenzaremos por demostrar el siguiente teorema, que usaremos despu es para de-
mostrar la unicidad de la soluci on del problema unidimensional de difusi on con determi-
nadas condiciones de contorno.
Teorema V.5.1 Sea u(x, t) soluci on de la ecuaci on de calor homog enea, u
t
u
xx
= 0,
denida en R = (x, t) : a x b, 0 t T. Sea la uni on de la base del rect angulo,
(x, 0) : a x b y sus lados verticales (a, t) : 0 t T, (b, t) : 0 t T. Entonces,
maxu(x, t) : (x, t) R = maxu(x, t) : (x, t) .
minu(x, t) : (x, t) R = minu(x, t) : (x, t) .
Demostraci on:
Consideremos, primero, una funci on auxiliar v(x), tal que v
t
v
xx
< 0 en R. Su-
pongamos que v(x, t) tiene un m aximo en (x
0
, t
0
), que no pertenece a . Si el punto no
pertenece al lado superior del rect angulo, v debe satisfacer, en ese punto,
v
t
(x
0
, t
0
) = 0, v
xx
(x
0
, t
0
) 0 ,
que resulta incompatible con la inecuaci on diferencial satisfecha por v. Si, en cambio, el
m aximo se alcanzase sobre el lado superior ((x, T) : a x b), entonces, para (x
0
, t
0
)
muy pr oximo a ese borde, se tendra
v
t
(x
0
, t
0
) 0, v
xx
(x
0
, t
0
) 0 ,
de modo que tambi en se contradira la inecuaci on satisfecha por v(x, t).
Ahora, si consideramos u(x, t) tal que satisface u
t
u
xx
= 0, podemos construir
v(x, t) = u(x, t) + x
2
, con > 0, que satisface v
t
v
xx
2a
2
< 0 y, por lo tanto, si
M es el m aximo valor de u(x, t) sobre , se tiene
v(x, t) M + x
2
M + b
2
tanto en el interior como en . Como consecuencia,
u(x, t) = v(x, t) x
2
v(x, t) M + b .
Dado que es arbitrario, resulta u(x, t) M en toda la regi on. Por supuesto, lo
mismo ocurre con los mnimos. En efecto, si u(x, t) satisface la ecuaci on diferencial,
u(x, t) tambi en lo hace y los mnimos de una son los m aximos de la otra.
230
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
Este teorema tiene una interpretaci on simple: si no hay fuentes de calor en la barra, la
temperatura no puede estar por encima del m aximo entre las temperaturas iniciales y las
temperaturas en los extremos. Lo mismo ocurre con los mnimos.
A partir de este teorema es muy f acil demostrar la unicidad de la soluci on de la ecua-
ci on de calor (tanto homog enea como inhomog enea), para una dada condici on inicial
u(x, 0) = (x) y con condiciones de contorno Dirichlet como las ya estudiadas en el
caso de la ecuaci on de la cuerda vibrante. En efecto, proponiendo la existencia de dos so-
luciones tendremos que la diferencia de ambas, w(x, t) = u
1
(x, t) u
2
(x, t) satisfar a la
ecuaci on homog enea y, adem as, ser a nula en todo . En consecuencia, deber a ser menor
o igual que cero. Por la segunda parte del teorema anterior deber a, tambi en, ser mayor
o igual que cero. Por lo tanto, debe ser w = 0 en toda la regi on R, contradiciendo la
hip otesis de existencia de dos soluciones distintas.
V.5.7. Evoluci on de la temperatura en barras nitas
Estudiemos la evoluci on de la temperatura u(x, t) en una barra nita de longitud L,
con condiciones de contorno
u(0, t) = u(L, t) = 0
y condici on inicial
u(x, 0) = (x) .
Podemos plantear u(x, t) = X(x)T(t) en la ecuaci on
u
t
u
xx
= 0 ,
obteniendo
T
T
=
X
X
= k
2
,
que conduce a T(t) = T(0)e
kt
y X(x) = Acos kx + Bsin kx para k ,= 0 (para
k = 0 se obtiene, en cambio, X(x) = A+Bx, que se anula id enticamente al imponer las
condiciones de contorno). La condici on de contorno implica X(0) = X(L) = 0, en cuyo
caso A = 0 y k = n/L, n = 1, 2, . . .. Se obtiene entonces la soluci on producto
X
n
(x)T
n
(t) = c
n
e
(n/L)
2
t
sin(nx/L)
y la soluci on general
u(x, t) =
n=1
c
n
e
(n/L)
2
t
sin(nx/L) .
La condici on inicial implica que
u(x, 0) =
n=1
c
n
sin(nx/L) = (x) ,
231
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
expresi on que constituye el desarrollo en serie de medio rango en senos de (x) y deter-
mina los coecientes c
n
:
c
n
=
2
L
_
L
0
sin(
n
L
x)(x)dx.
El resultado nal puede expresarse como
u(x, t) =
_
L
0
K(x, x
, t)(x
)dx
,
donde
K(x, x
, t) =
2
L
n=1
e
(n/L)
2
t
sin(
n
L
x) sin(
n
L
x
)
representa la funci on respuesta de la ecuaci on de difusi on en la barra nita con las con-
diciones de contorno anteriores. La condici on inicial es, por lo tanto, naturalmente des-
compuesta en modos normales que exhiben un decaimiento exponencial e
(n/L)
2
t
.
Para tiempos grandes, unicamente el modo sim etrico fundamental (sin(x/L)) permane-
cer a visible (si c
1
,= 0), con una amplitud c
1
e
(/L)
2
t
.
Notemos, tambi en, que el problema con temperatura ja en los bordes,
u(0, t) = T
0
, u(L, T) = T
L
,
donde T
0
y T
L
son independientes de t, puede reducirse al problema anterior si reempla-
zamos
u(x, t) = w(x, t) + T
0
+
x
L
(T
L
T
0
) .
La funci on lineal constante de la derecha se encarga de garantizar que se cumpla la con-
dici on de contorno y satisface exactamente la ecuaci on de difusi on homog enea (es una
soluci on estacionaria), por lo que w(x, t) satisface tambi en la ecuaci on de difusi on ho-
mog enea, pero con condiciones de contorno homog eneas (w(0, t) = w(L, t) = 0). Enton-
ces, w(x, t) estar a dada por la soluci on anterior (con w(x, 0) = u(x, 0)(T
0
+
x
L
(T
L
T
0
)).
En este caso
lm
t
u(x, t) = T
0
+
x
L
(T
L
T
0
) .
Se pueden emplear m etodos an alogos para estudiar la difusi on del calor en otras situa-
ciones tales como barras nitas con fuentes de calor, barras aisladas, regiones bidimen-
sionales, etc. En V.7 presentaremos la funci on de Green para una regi on general.
Problema sugerido V.5.4: Mostrar que la temperatura u(x, t) en una barra nita
de longitud L t ermicamente aislada (u
x
(0, t) = u
x
(L, t) = 0) con la condici on inicial
u(x, 0) = (x), es de la forma
u(x, t) = c
0
+
n=1
c
n
e
(n/L)
2
t
cos
_
n
L
x
_
.
232
V.5 DIFUSI
ON EN UNA DIMENSI
ON ESPACIAL
tt
0
0
.02
0.0 0.2 0.4 0.6 0.8 1.0
xx
0
0.0
0.2
0.4
0.6
0.8
uT
0
Figura 38: Perl de la temperatura u(x, t) en una barra nita con condiciones de contorno
u(0, t) = 0, u(x
0
, t) = T
0
/2 y condici on incial u(x, 0) = T
0
(x/(2x
0
) +0,4[sin(x/x
0
) +
sin(2x/x
0
)], para t/t
0
desde 0 a 0,2 con paso 0,02 (y x
2
0
/t
0
= 1). Se indica tambi en el
resultado para t . Las componentes de Fourier m as altas decaen m as r apidamente,
por lo que s olo se observa el primer modo no estacionario (adem as del estacionario) si
t/t
0
no es muy peque no. Se deja como ejercicio hallar u(x, t).
Determinar c
0
y c
n
, e interpretar el resultado, indicando el signicado de c
0
. Determinar
tambi en la funci on respuesta K(x, x
, t) correspondiente.
Problema sugerido V.5.5: Mostrar que la temperatura u(x, t) en una barra nita de
longitud L t ermicamente aislada en un extremo (u
x
(0, t) = 0) y con temperatura ja en
el otro (u(L, t) = T
L
), que satisface la condici on inicial u(x, 0) = (x), es de la forma
u(x, t) = T
L
+
n=0
c
n
e
((n+1/2)/L)
2
t
cos
_
(n + 1/2)
L
x
_
.
Determinar c
n
, e interpretar el resultado, indicando el lmite lm
t
u(x, t). Determinar,
tambi en, la funci on respuesta K(x, x
, t) correspondiente.
233
V.6 ECUACI
ON DE LAPLACE
V.6. Ecuaci on de Laplace
V.6.1. Introducci on
La ecuaci on de Laplace no s olo constituye el ejemplo m as relevante de ecuaci on elpti-
ca, sino que, debido a su ubicuidad, puede considerarse como la ecuaci on m as importante
de toda la Fsica Matem atica. En efecto, aparece ligada a fen omenos tan diversos como
los procesos electromagn eticos, la difusi on del calor, la din amica de uidos y la gravita-
ci on, por citar s olo algunos. De hecho, tanto la ecuaci on de ondas como la de difusi on,
contienen al operador de Laplace. En el marco especco de la Matem atica, esta ecuaci on
desempe na un papel central en la teora de las funciones analticas.
Generalmente, nuestro primer encuentro con la ecuaci on de Laplace tiene lugar al
encarar el estudio de la electrost atica. Dada una densidad volum etrica de carga el ectrica
(r), donde r es un vector de posici on, el problema central es la determinaci on del campo
el ectrico E(r). Introduciendo el potencial electrost atico u(r) a trav es de su relaci on con
el campo: E(r) = u(r), donde es el operador gradiente, se encuentra (ver [18]):
u(r) =
1
0
(r), (V.6.1)
donde
0
es la permitividad el ectrica del vaco y, en coordenadas cartesianas,
=
2
x
2
+
2
y
2
+
2
z
2
. (V.6.2)
A menudo interesa determinar el potencial electrost atico en regiones del espacio don-
de no se encuentran ubicadas las cargas que originan los campos, es decir, en regiones
donde se verica (r) = 0. Entonces, el problema a resolver es
u = 0 , (V.6.3)
que se conoce como ecuaci on de Laplace homog enea o, simplemente, ecuaci on de La-
place. La ecuaci on inhomog enea se conoce como ecuaci on de Poisson. Recordemos que
el operador es, a menos de una constante, el unico operador diferencial lineal de se-
gundo orden invariante tanto frente a traslaciones como rotaciones del sistema de ejes
coordenados, lo que explica su ubicuidad en la descripci on de sistemas fsicos uniformes
e isotr opicos. Por ejemplo, la temperatura estacionaria en una cierta regi on con conducti-
vidad t ermica isotr opica uniforme, sin fuentes o sumideros de calor en el interior, tambi en
satisface la ecuaci on de Laplace.
En el contexto de nuestro ejemplo, la soluci on de (V.6.1) (o (V.6.3), seg un correspon-
da), suplementada con apropiadas condiciones de contorno, permite, en principio, deter-
minar u y, por lo tanto, tambi en el campo E. Este esquema de trabajo, conceptualmente
sencillo, que acabamos de delinear someramente, dista de ser trivial a la hora de imple-
mentarlo en situaciones concretas. La resoluci on efectiva de (V.6.3) depende fuertemente
234
V.6 ECUACI
ON DE LAPLACE
de una elecci on apropiada del sistema de coordenadas, que contemple de modo adecua-
do las simetras de cada situaci on. Antes de considerar detalladamente estas cuestiones
en los p arrafos siguientes, resulta conveniente presentar algunos aspectos generales de
la ecuaci on de Laplace homog enea y de sus soluciones, llamadas funciones arm onicas.
Consideremos el caso m as simple posible en el que la funci on u depende solamente de
una variable x. El operador laplaciano se reduce a la derivada segunda
d
2
dx
2
y resulta,
entonces, muy f acil encontrar la soluci on general para este caso:
u(x) = ax + b ,
donde a y b son dos constantes que se podran determinar mediante condiciones en los
extremos del intervalo para el cual se desea resolver el problema. Este ejemplo, en su
extrema simpleza, permite ya analizar propiedades profundas de las funciones arm onicas,
que perduran a un en los casos en que se tienen dos, tres o m as variables. Es f acil com-
probar que, en nuestro ejemplo simple, u(x) =
u(x+x
0
)+u(xx
0
)
2
, x
0
, es decir que la
soluci on de la ecuaci on de Laplace en un dado punto resulta ser el promedio de las solu-
ciones a una dada distancia a izquierda y derecha del punto en cuesti on. Una consecuencia
directa de esta propiedad es que la soluci on no admite mnimos o m aximos locales en el
interior de la regi on; los valores extremos s olo pueden ubicarse en los extremos del in-
tervalo. Enfatizamos que estas propiedades, que resultan evidentes en el caso de una sola
variable, siguen siendo v alidas para cualquier n umero de dimensiones. Por ejemplo, en el
caso de 2 variables puede demostrarse que el valor de u en un punto (x, y) dentro de la
regi on de inter es es igual al promedio de u a lo largo de una circunferencia de radio R con
centro en (x, y): u(x, y) =
1
2R
_
udl. Consecuentemente, en una regi on bidimensional
los valores extremos de u s olo pueden darse sobre la curva que dene la frontera de dicha
regi on. M as adelante demostraremos estos resultados.
Como advertimos anteriormente, para poder resolver una ecuaci on diferencial es cru-
cial elegir apropiadamente el sistema de coordenadas. En caso de resolver la ecuaci on
diferencial en cierta regi on con borde deberemos, adem as, imponer ciertas condiciones
de borde o de contorno en la frontera de dicha regi on. En la secci on que sigue presentare-
mos los tipos de condiciones de contorno locales usualmente impuestas sobre el dominio
del operador de Laplace y discutiremos la unicidad (o no) de la soluci on en cada caso.
V.6.2. Teorema del valor m aximo para la ecuaci on de Laplace
Como ocurra en el caso de la ecuaci on homog enea para la difusi on de calor en una
barra, la ecuaci on de Laplace satisface un teorema del valor m aximo:
Teorema V.6.1 (del valor m aximo) Sea D R
n
una regi on acotada y conexa, con bor-
de D. Si u(x
1
, . . . , x
n
), denida y continua en la regi on D D es arm onica en D, es
decir, que satisface
u =
n
i=1
2
u
x
2
i
= 0
235
V.6 ECUACI
ON DE LAPLACE
en D, los valores m aximo y mnimo de u se alcanzan en D.
Demostraci on:
Tomemos, primero, una funci on v(x
1
, ..., x
n
) subarm onica, es decir, tal que satisface
v =
n
i=1
2
v
x
2
i
> 0 en D. Tal funci on no puede tener un m aximo en D. En efecto,
si lo tuviese debera cumplirse
2
v
x
2
i
0, i = 1, . . . n en el mismo, contradiciendo su
condici on de funci on subarm onica.
Ahora, supongamos que u(x
1
, ..., x
n
) es arm onica en D, es decir,
n
i=1
2
u
x
2
i
= 0 en D.
Si denimos v(x
1
, ..., x
n
) = u(x
1
, ..., x
n
) +
n
i=1
x
2
i
, con > 0 arbitrario, tendremos
v = 2n > 0. Por consiguiente, v toma su m aximo valor en D. Como consecuencia de
la denici on de v, si M es el m aximo valor de u en el borde, v M + m ax
D
n
i=1
x
2
i
.
Por otra parte, u(x
1
, ..., x
n
) = v(x
1
, ..., x
n
)
n
i=1
x
2
i
< v M + m ax
D
n
i=1
x
2
i
.
Dado que es arbitrario, resulta u(x
1
, ..., x
n
) M .
El resultado concerniente al mnimo se deriva de inmediato, teniendo en cuenta que,
si u es arm onica, u tambi en lo es y los mnimos de la primera no son otra cosa que los
m aximos de la segunda.
El teorema implica, obviamente, que u no puede tener un m aximo o mnimo local
aislado en el interior de D(si lo tuviese, el m aximo o mnimo absoluto de u en una regi on
D D sucientemente peque na que contenga ese extremo se alcanzara en su interior,
contradiciendo el teorema para esta regi on). Veremos luego, en la secci on V.6.7.2, otra
demostraci on rigurosa general de esta propiedad, al mostrar que el valor de una funci on
arm onica u en un punto es siempre el promedio de los valores en una esfera s olida cir-
cundante. Esto es v alido en n dimensiones e implica que u no puede alcanzar el m aximo
o mnimo en el interior de D, salvo que sea constante.
En forma m as intuitiva, la condici on u = 0 implica que la suma de las concavi-
dades
2
u
x
2
i
debe ser 0 para una funci on arm onica, por lo que si en un entorno de r
0
u es
c oncava hacia abajo en una cierta direcci on (
2
u
x
2
i
< 0), debe existir al menos una direcci on
ortogonal en la que u es c oncava hacia arrriba (
2
u
x
2
j
> 0). Esto impide que u exhiba un
m aximo o mnimo en el interior de D. Si u tiene un punto estacionario (u = 0) en el
interior debe, entonces, ser necesariamente un punto silla.
V.6.3. Condiciones de contorno para el operador de Laplace
Como ya se mencion o, al estudiar el operador de Laplace en una regi on D R
n
con
borde D, la correcta denici on del operador requiere determinar su dominio mediante
la imposici on de condiciones de contorno. Los tres tipos de condiciones de contorno m as
usuales para el problema de Laplace en el interior de una regi on dada son:
236
V.6 ECUACI
ON DE LAPLACE
Determinar u denida y continua en D D tal que
u(r) = f(r)
u(s) = g(s) , (V.6.4)
donde r D y s D.
Este es el llamado Problema de contorno de Dirichlet.
Determinar u denida y continua en D D tal que
u(r) = f(r)
u
n
(s) = g(s) , (V.6.5)
con
u
n
(s) la derivada normal exterior evaluada en el borde.
Este es el llamado Problema de contorno de Neumann.
Determinar u denida y continua en D D tal que
u(r) = f(r)
u
n
(s) + h(s)u(s) = g(s) , (V.6.6)
con h(s) 0 y no id enticamente nula.
Este es el llamado Problema de contorno de Robin.
La unicidad de la soluci on para el problema de contorno de Dirichlet (V.6.4) se de-
muestra f acilmente haciendo uso del teorema del valor m aximo. En efecto, si suponemos
que u y v son dos soluciones del problema w = u v es arm onica y se anula en D. Por
lo tanto, w 0 y w 0. Esto demuestra que w es id enticamente nula.
La unicidad del problema de contorno de Robin se demuestra usando la primera iden-
tidad de Green (ver Ap endice B). En efecto, para la diferencia de dos soluciones w se
tiene:
_
D
(w)
2
dV =
_
D
(ww) dV
=
_
D
w
w
n
dS =
_
D
h(s)(w(s))
2
. (V.6.7)
En la primera igualdad hemos usado que w es arm onica, en la segunda igualdad hemos
usado la primera identidad de Green y, nalmente, hemos usado la condici on de contorno
de la ecuaci on (V.6.6). Ahora, el primer miembro de la igualdad es no negativo. Como
consecuencia de las condiciones impuestas sobre la funci on h, el ultimo miembro de
la igualdad es no positivo. En consecuencia, ambos deben ser id enticamente nulos. La
anulaci on del primer miembro exige que w = 0 y, por lo tanto, que w sea constante en
237
V.6 ECUACI
ON DE LAPLACE
D. Por su parte, la anulaci on del ultimo miembro exige la anulaci on de w en el borde.
Por continuidad, concluimos que w es id enticamente nula y hemos demostrado, as la
unicidad de la soluci on al problema de contorno de Robin.
En cuanto al problema de Neumann, es evidente que la soluci on de la ecuaci on de
Laplace homog enea no es unica en este caso, ya que dos soluciones pueden diferir en
una constante arbitraria sin contrariar la condici on de contorno. Tambi en se nalamos que
el problema general de Neumann s olo est a bien formulado si se cumple la condici on de
compatibilidad
_
D
f(r) dV =
_
D
g(s) dS. Efectivamente, en este caso se tiene
_
D
f(r) dV =
_
D
udV =
_
D
u
n
dS =
_
D
g(s) dS . (V.6.8)
Volveremos sobre estos puntos al tratar la funci on de Green para este tipo de condi-
ciones de contorno.
En cuanto a los correspondientes problemas exteriores, se obtienen id enticas conclu-
siones sobre la unicidad de sus soluciones si, adem as, se exige que las mismas permanez-
can acotadas en el innito (ya que el exterior no es una regi on compacta).
Los problemas de contorno aqu presentados tienen otra caracterstica importante:
Teorema V.6.2 Con su dominio denido por el caso homog eneo (g(s) = 0 s) de cual-
quiera de las condiciones de contorno antes presentadas, el operador de Laplace es au-
toadjunto (ver la nota 1 a pie de p agina en la secci on III.1.3).
Demostraci on: Si u es una funci on en el dominio del operador de Laplace y v es una
funci on en el dominio de su adjunto (aqu supuestas reales), se tiene ((v, u) representa el
producto escalar usual en L
2
):
(v, u) = (v, u) =
_
D
dV v u =
_
D
dV (v) u
+
_
D
dSv
u
n
=
_
D
dV (v)u +
_
D
dS
_
v
u
n
u
v
n
_
, (V.6.9)
donde hemos usado repetidamente el teorema de Gauss. Adem as, es inmediato vericar
que, para todos los problemas de contorno considerados se satisface:
_
D
_
v
u
n
u
v
n
_
= 0 .
si u y v satisfacen la misma condici on de contorno. Como consecuencia, deniendo su
dominio de cualquiera de estos tres modos, el operador de Laplace resulta autoadjunto,
es decir,
(v, u) = (v, u) .
238
V.6 ECUACI
ON DE LAPLACE
Mostremos nalmente que
Teorema V.6.3 La soluci on u(r) de la ecuaci on de Laplace u = 0 para r D con
las condiciones de contorno de Dirichlet u(s) = g(s) para s D, es la funci on que
minimiza la integral
I =
1
2
_
D
[u[
2
dV
entre todas las funciones que satisfacen la condici on de contorno anterior.
Demostraci on:
Si u es la funci on que minimiza I y consideramos una variaci on I = I(u+u)I(u),
con u(s) = 0 para s D, obtenemos, hasta primer orden en u,
I =
_
D
(u) (u)dV =
_
D
(u) nudS
_
D
uudV
=
_
D
uudV = 0 (V.6.10)
lo cual debe valer u que se anule en el borde. Por lo tanto, necesariamente u(r) debe
satisfacer u = 0 r D. En tal caso, el incremento exacto es I =
1
2
_
D
[u[
2
dV >
0 si u no es nula, lo que muestra que u es necesariamente un mnimo.
En otras palabras, una funci on arm onica es la funci on m as chata (en el sentido
de minimizar el promedio sobre D del gradiente cuadrado [u[
2
) compatible con las
condiciones de contorno.
V.6.4. Funciones arm onicas en diversas geometras. El problema de
Poisson
El problema de Poisson consiste en la reconstrucci on de la soluci on de la ecuaci on de
Laplace homog enea en el interior de la regi on de volumen Da partir del conocimiento de
los valores que toma en el borde D. A continuaci on resolveremos problemas de ese tipo
en regiones con distintas geometras.
V.6.4.1. Arm onicos rectangulares
Empecemos por considerar el caso en que u depende s olo de dos variables y la ecua-
ci on de Laplace se expresa en coordenadas cartesianas. Esto resultar a lo m as conveniente
cuando el sistema fsico a estudiar tenga una forma rectangular. Podra tratarse, por ejem-
plo, de una placa conductora rectangular con voltajes aplicados en sus lados, siendo la
funci on inc ognita el potencial el ectrico en cualquier punto de su interior. O tambi en de
una placa rectangular con conductividad t ermica uniforme sin fuentes o sumideros de ca-
lor en el interior, de la cual se conoce la distribuci on de temperatura en el borde, siendo la
239
V.6 ECUACI
ON DE LAPLACE
inc ognita la temperatura en el interior. Podra tratarse tambi en de una membrana el astica
rectangular estirada y ja en el borde, en el que tiene una cierta altura no uniforme, siendo
la inc ognita la altura de la membrana en el interior.
Buscaremos, entonces, soluciones de
u =
2
u
x
2
+
2
u
y
2
= 0
en el interior de un rect angulo 0 x a, 0 y b. Estudiaremos primero el problema
de Dirichlet correspondiente, o sea, la determinaci on de u a partir de sus valores en el
borde del rect angulo,
u(x, b) = f
1
(x), u(x, 0) = f
2
(x), u(a, y) = f
3
(y), u(0, y) = f
4
(y) .
u(x,0)
u(x,b)
u(0,y) u(a,y)
0 a
x
b
y
Figura 39: El rect angulo 0 x a, 0 y b y las condiciones de contorno en el
problema de Dirichlet asociado.
Debido a la linealidad de la ecuaci on, con la consiguiente propiedad de superposici on,
podemos escribir la soluci on en la forma
u = u
1
+ u
2
+ u
3
+u
4
,
donde u
1
es la soluci on para f
2
= f
3
= f
4
= 0 y, en general, u
i
aquella para f
j
= 0 si
j ,= i.
Consideremos, por ejemplo, u
1
. Planteando una soluci on del tipo
u
1
(x) = X(x)Y (y)
tenemos u
1
= X
Y +XY
= 0, o sea, X
/X +Y
/Y = 0, obteni endose las ecuacio-
nes
X
= k
2
X, Y
= k
2
Y ,
con k constante. Las soluciones son de la forma
X(x) = Acos(kx)+Bsin(kx) , Y (y) = C cosh(ky)+Dsinh(ky)
240
V.6 ECUACI
ON DE LAPLACE
para k ,= 0 y
X(x) = A + Bx, Y (y) = C + DY
para k = 0. Como u
1
(0, y) = u
1
(a, y) = 0 X(0) = X(a) = 0, lo que implica
k = n/a (real), con n = 1, 2, . . . si deseamos obtener soluciones no triviales (u no
id enticamente nula). La condici on u
1
(x, 0) = 0 implica, adem as, C = 0. Por lo tanto,
X(x)Y (y) = Asin(k
n
x) sinh(k
n
y), k
n
= n/a ,
y la soluci on general para u
1
es
u
1
(x, y) =
n=1
A
n
sin(k
n
x) sinh(k
n
y) .
La condici on de contorno
u
1
(x, b) = f
1
(x) =
n=1
A
n
sin(k
n
x) sinh(k
n
b)
determina los coecientes A
n
, dado que la expresi on anterior constituye el desarrollo en
serie de Fourier de 1/2 rango de senos de f
1
(x) en [0, a]. Por lo tanto,
A
n
=
2
a sinh(k
n
b)
_
a
0
f
1
(x) sin(k
n
x)dx.
La soluci on nal puede, pues, escribirse como
u
1
(x, y) =
_
a
0
_
2
a
n=1
sin(k
n
x) sin(k
n
x
)
sinh(k
n
y)
sinh(k
n
b)
_
f
1
(x
)dx
. (V.6.11)
En forma an aloga se procede para los dem as casos. Por ejemplo, u
2
(x, y) ser a de la forma
u
2
(x, y) =
n=1
C
n
sin(k
n
x) sinh[k
n
(b y)] .
241
V.6 ECUACI
ON DE LAPLACE
0.5 1
x
0.2
0.2
0.4
f (x)
Figura 40: Izquierda: Gr aco de la funci on arm onica en el cuadrado 0 x 1,
0 y 1, que satisface u(0, y) = u(1, y) = u(x, 1) = 0 y u(x, 0) = f(x), con
f(x) = cos x + sin 3x y = 0,1, = 0,15 (centro). Derecha: Gr aco de la
funci on arm onica obtenida al repetir dicha funci on como condici on de contorno en los
cuatro lados. Se deja como ejercicio dar la expresi on de u(x, y) en ambos casos.
Problema sugerido V.6.1: En base a la discusi on anterior, encontrar la soluci on de la
ecuaci on de Laplace en el rect angulo, con condiciones de Neumann sobre los lados.
Consideremos, ahora, el caso en que a , es decir, la franja x 0, 0 y b, con las
condiciones de contorno
u(x, 0) = u(x, b) = 0, u(0, y) = f(y) .
Planteando una soluci on de la forma u(x, y) = X(x)Y (y), tenemos
X
= k
2
X, Y
= k
2
Y ,
cuyas soluciones conviene escribir como
X(x) = Ae
kx
+ Be
kx
, Y (y) = C cos(ky) + Dsin(ky) .
La condici on u(x, 0) = u(x, b) = 0 implica Y (0) = Y (b) = 0, y por lo tanto C = 0,
con k = n/b, real, n = 1, 2, . . .. Si exigimos que u permanezca acotada para x
A = 0. Por lo tanto,
X(x)Y (y) = Be
k
n
x
sin(k
n
y), k
n
= n/b
242
V.6 ECUACI
ON DE LAPLACE
y la soluci on general es
u(x, y) =
n=1
A
n
e
k
n
x
sin(k
n
y) . (V.6.12)
La condici on de contorno
u(0, y) = f(y) =
n=1
A
n
sin(k
n
y)
determina los coecientes A
n
:
A
n
=
2
b
_
b
0
f(y) sin(k
n
y)dy .
La soluci on nal puede escribirse como
u(x, y) =
2
b
_
b
0
_
n=1
e
k
n
x
sin(k
n
y) sin(k
n
y
)
_
f(y
)dy
.
La serie puede, en este caso, evaluarse f acilmente como suma de series geom etricas, es-
cribiendo sin(k
n
y) = (e
ik
n
y
e
ik
n
y
)/(2i) y recordando que
n=0
e
k
n
(x+iy)
=
n=0
(e
k(x+iy)
)
n
=
1
1 e
k(x+iy)
, k = /b .
El resultado nal es
n=1
e
k
n
x
sin(k
n
y) sin(k
n
y
) =
e
kx
(1 e
2kx
) sin(ky) sin(ky
)
(1+e
2kx
2e
kx
cos k(y+y
))(1+e
2kx
2e
kx
cos k(yy
))
.
El integrando decrece exponencialmente con x. Los factores en el denominador son la
distancia al cuadrado entre los puntos de coordenadas polares (e
kx
, ky) y (1, ky
) (ver
m as adelante discusi on sobre m etodos de variable compleja en V.6.5).
V.6.4.2. Problema del semiplano
En muchas aplicaciones resulta de inter es resolver la ecuaci on de Laplace en una re-
gi on de extensi on innita. Consideremos ahora el semiplano y 0, x . Resolveremos
la ecuaci on u = 0 conociendo los valores de u en el eje x, u(x, 0) = f(x), con la con-
dici on que u(x, y) permanezca acotada. Planteando nuevamente separaci on de variables,
u(x, y) = X(x)Y (y), tenemos
X
= k
2
X, Y
= k
2
Y ,
243
V.6 ECUACI
ON DE LAPLACE
con k constante. La soluci on correspondiente a k = 0 debe descartarse por no ser acotada.
Las restantes soluciones pueden escribirse en la forma
X(x) = Ae
ikx
+ Be
ikx
, Y (y) = De
ky
+ Ee
ky
, k ,= 0 .
Si queremos que u permanezca acotada para y D = 0 si k < 0 y E = 0 si
k > 0, los que podemos resumir como Y (y) = Ce
|k|y
. Por lo tanto,
X(x)Y (y) = A(k)e
ikx
e
|k|y
y la soluci on general (ahora k es un ndice continuo) es
u(x, y) =
_
A(k)e
ikx
e
|k|y
dk , (V.6.13)
donde la integral denota valor principal. La condici on de contorno
u(x, 0) = f(x) =
_
A(k)e
ikx
dk
determina, ahora, la funci on A(k), que no es otra cosa que la transformada de Fourier de
f(x) dividida por
2. Recordando las f ormulas de inversi on obtenemos
A(k) =
1
2
_
f(x)e
ikx
dx.
Insertando esta expresi on en (V.6.13) obtenemos
u(x, y) =
_
K(x x
, y)f(x
)dx
,
con
K(x, y) =
1
2
_
e
ikx|k|y
dk =
1
Re
_
0
e
k[yix]
dk
=
1
2
Re[
1
y ix
] =
1
y
x
2
+y
2
.
Obtenemos, nalmente,
u(x, y) =
y
f(x
)dx
(x x
)
2
+ y
2
. (V.6.14)
El denominador es la distancia al cuadrado del punto (x, y) al punto (x
, 0) del borde.
Notemos que
lm
y0
+
K(x, y) = (x) .
244
V.6 ECUACI
ON DE LAPLACE
En efecto, K(x, y) > 0 si y > 0, con lm
y0
+
K(x, y) = 0 si x ,= 0 y lm
y0
+
K(0, y) = .
Adem as,
_
K(x, y)dx =
1
ydx
x
2
+ y
2
=
1
arctan(
x
y
)
= 1 .
Como veremos en pr oximas secciones, el resultado (V.6.14) puede obtenerse tambi en
directamente de la soluci on de Poisson para el interior del crculo, por m etodos de variable
compleja y mediante el uso de la funci on de Green.
Problema sugerido V.6.2: Resolver u = 0 para una l amina rectangular de ancho nito
b y longitud innita (0 y b, x ), conociendo los valores de u en el eje y (sobre un
segmento de ancho b), u(0, y) = f(y) y sobre los lados: u(x, 0) = g(x) y u(x, b) = h(x).
Problema sugerido V.6.3: Resolver u = 0 para una l amina rectangular innita 0
x , 0 y , con u(x, 0) = f(x), u(0, y) = g(y). Sugerencia: Completar las
condiciones de contorno en forma impar, justicando esta opci on.
V.6.4.3. Arm onicos rectangulares en tres o m as dimensiones
En forma completamente an aloga puede tratarse la ecuaci on u = 0 en regiones del
tipo 0 x a, 0 y b, 0 z c, etc., en tres o m as dimensiones. Consideremos,
por ejemplo, las condiciones de contorno
u(0, y, z) = u(a, y, z) = 0, u(x, 0, z) = u(x, b, z) = 0
u(x, y, 0) = 0, u(x, y, c) = f(x, y) .
Planteando una soluci on del tipo u(x, y, z) = X(x)Y (y)Z(z), obtenemos X
Y Z +
Y
XZ + Z
XY = 0 y por lo tanto, dividiendo por XY Z,
X
/X + Y
/Y + Z
/Z = 0
de donde
X
= k
2
x
X, Y
= k
2
y
Y, Z
= (k
2
x
+ k
2
y
)Z ,
con k
x
, k
y
constantes. Las soluciones son de la forma
X(x) = Acos(k
x
x) + Bsin(k
x
x), Y (y) = C cos(k
y
y) + Dsin(k
y
y),
Z(z) = E cosh(k
z
z) + F sinh(k
z
z), k
z
=
_
k
2
x
+ k
2
y
.
Para las presentes condiciones de contorno, A = C = E = 0, por lo que la soluci on
producto es de la forma sin(k
x
) sin(k
y
) sinh(k
z
z), con k
x
= n/a, k
y
= m/b y n, m
naturales > 0. La soluci on general es, pues,
u(x, y, z) =
n,m
A
nm
sin(
n
a
x) sin(
m
b
y) sinh(k
nm
z) ,
245
V.6 ECUACI
ON DE LAPLACE
con k
nm
=
_
n
2
a
2
+
m
2
b
2
. La condici on de contorno
u(x, y, c) =
n,n
A
nm
sin(
n
a
x) sin(
m
a
y) sinh(k
nm
c) = f(x, y)
determina los coecientes A
nm
por medio del desarrollo bidimensional en serie de medio
rango de senos:
A
nm
=
2
a
2
b
1
sinh(k
nm
c)
_
a
0
dx
_
b
0
dy f(x, y) sin(
n
a
x) sin(
m
a
y) .
La soluci on para condiciones de contorno Dirichlet no nulas en todos los lados se resuelve
por superposici on (de seis soluciones en 3 dimensiones).
V.6.4.4. Arm onicos circulares y soluci on de Poisson en el disco
Otro caso de gran inter es pr actico es aqu el en el que la regi on bajo estudio es un sector
circular. En esta situaci on, resultar a conveniente elegir un sistema de coordenadas polares
con su origen en el centro de las circunferencias que delimitan el sector. Consideremos,
entonces, la ecuaci on de Laplace u = 0, con
=
2
r
2
+
1
r
r
+
1
r
2
2
(V.6.15)
en un sector circular r
1
r r
2
, 0 < 2. La ecuaci on de Laplace homog enea
en coordenadas polares es, entonces
2
u
r
2
+
1
r
u
r
+
1
r
2
2
= 0 . (V.6.16)
u(r,0)
u(r,)
u(a,)
u(b,)
0 a b
x
y
Figura 41: El sector circular a r b, 0 , y las condiciones de contorno en
el problema de Dirichlet asociado.
Proponiendo una soluci on producto u(r, ) = R(r)(), se obtienen las ecuaciones
R
+
R
r
k
2
R
r
2
= 0,
= k
2
246
V.6 ECUACI
ON DE LAPLACE
con k constante, cuyas soluciones son
R(r) = Ar
k
+ Br
k
, () = a cos(k) + b sin(k), k ,= 0
R(r) = A + Bln r = Bln
r
r
0
, () = a + b, k = 0 (V.6.17)
(la ecuaci on para Res del tipo de Euler y su soluci on es de la forma r
, con determinado
por ( 1) + k
2
= 0, o sea, = k; si k = 0 la otra soluci on linealmente
independiente de r
0
= 1 es r
ln r = ln r). Obs ervese que k puede ser, en principio, real,
imaginario o complejo (si k = k
r
+ik
i
, r
k
= e
k lnr
= e
k
r
ln r
[cos(k
i
ln r) +i sin(k
i
ln r)]).
Como ejemplo, si u(r, 0) = u(r, ) = 0, con
u(r
1
, ) = f
1
(), u(r
2
, ) = f
2
()
a = 0 y k = n/ (real), con n 1. La soluci on general es, por lo tanto,
u(r, ) =
n=1
(A
n
r
n/
+B
n
r
n/
) sin(n/) , (V.6.18)
donde las constantes A
n
y B
n
pueden obtenerse a partir del desarrollo en serie de senos
de f
1
() y f
2
(). Se dejan los detalles para el lector. Obviamente, si u debe permanecer
acotada y r
1
= 0 B
n
= 0, mientras que, si r
1
> 0 y r
2
, entonces A
n
= 0.
En el caso de un anillo circular 0 2, con r
1
r r
2
, u debe ser monovalua-
da, lo que implica k = n, con n entero (y b = 0 si k = n = 0). La soluci on general es de
la forma
u(r, ) = A
0
+B
0
ln r
+
n=1
(A
n
r
n
+B
n
r
n
)[a
n
cos(n)+b
n
sin(n)] . (V.6.19)
Nuevamente, si r
1
= 0 B
0
= 0, B
n
= 0, mientras que, si r
2
= , B
0
= 0, A
n
= 0,
n 1.
Consideremos ahora el problema de determinar una funci on arm onica u en el interior
de un crculo de radio r
2
= a (o sea 0 r a, 0 2) conociendo los valores de u
en el contorno, u(a, ) = f(). La soluci on general debe ser, en este caso, de la forma
u(r, ) =
a
0
2
+
n=1
r
n
[a
n
cos(n) + b
n
sin(n)] . (V.6.20)
Por lo tanto,
u(a, ) = f() =
a
0
2
+
n=1
a
n
[a
n
cos(n) + b
n
sin(n)] ,
247
V.6 ECUACI
ON DE LAPLACE
2
0
2
0.5
1
u(1,)
Figura 42: Gr aco de la funci on arm onica u(r, ) (izquierda) en el interior del crculo de
radio 1 que satisface u(1, ) = + cos 2 + sin 4, con = 0,5, = 0,2, = 0,3.
N otese que u(r, ) no tiene m aximos ni mnimos locales, alcanzando su valor m aximo y
mnimo en el borde. En el centro (r = 0), u = 1/2, que es el valor medio en el borde. Se
deja como ejercicio dar la expresi on de u(r, ).
de donde, recordando la expresi on de los coecientes del desarrollo en serie de Fourier,
a
n
=
1
a
n
_
2
0
cos(n)f()d, b
n
=
1
a
n
_
2
0
sin(n)f()d, n 1 ,
con
a
0
2
=
1
2
_
2
0
f()d = f. Reemplazando en (V.6.20), y teniendo en cuenta que
cos(n) cos(n
) + sin(n) sin(n
) = cos[n(
)],
obtenemos
u(r, ) =
1
_
2
0
1
2
+
n=1
r
n
a
n
cos[n(
)]f(
)d
.
Deniendo z = (r/a)e
i
, con [z[ < 1, tenemos
1
2
+
n=1
r
n
a
n
cos(n) = Re[
1
2
+
n=1
z
n
] =
1
2
Re
1+z
1z
=
a
2
r
2
2 d
2
(r, a, )
, d
2
(r, a, ) = a
2
+ r
2
2ar cos() .
Encontramos, de esta forma, la soluci on de Poisson,
u(r, ) =
a
2
r
2
2
_
2
0
f(
)d
d
2
(r, a,
)
. r < a (V.6.21)
248
V.6 ECUACI
ON DE LAPLACE
Notemos que d(r, a,
) es, nuevamente, la distancia entre el punto (r, ) del interior
del crculo y el punto (a,
) del borde.
Comentarios:
1) Si r = 0, d
2
= a
2
y
u(0, 0) =
1
2
_
2
0
f(
)d
= f .
El valor de u en el centro del crculo es, entonces, el promedio de los valores de u en el
borde del crculo. Como esto es v alido para cualquier crculo con centro en (0, 0) y radio
r < a, vemos que el valor de una funci on u, arm onica en una regi on D, en un punto cual-
quiera (x, y) D es igual al promedio de los valores de u sobre cualquier circunferencia
con centro en (x, y) contenida en D. Una funci on arm onica no puede, en consecuencia,
poseer extremos (m aximos o mnimos) en el interior de D (ya que, de ser as, el valor en
el extremo sera superior o inferior al promedio). Como ya sabamos, valores extremos se
alcanzan siempre en el borde de D.
2) Problema exterior: Consideremos, ahora, el problema de determinar u(r, ) en el
exterior del crculo, es decir r a, conociendo los valores en el borde, u(a, ) = f().
Podemos repetir el esquema anterior, pero es m as f acil emplear el siguiente procedimiento
de inversi on: si u(r, ) es una funci on arm onica de la forma general (V.6.19), entonces
v(r, ) = u(
a
2
r
, ) = A
0
B
0
ln
r
a
2
+
n=1
(A
n
a
2n
r
n
+ B
n
r
n
a
2n
)[a
n
cos(n) + b
n
sin(n)]
es tambi en arm onica, pues es tambi en de la forma (V.6.19), y cumple v(a, ) = u(a, ).
Adem as, si u est a denida para r < a v estar a denida para a
2
/r < a, o sea, r > a.
Por lo tanto, la soluci on para el exterior del crculo ser a
v(r, ) = u(
a
2
r
, ) =
r
2
a
2
2
_
2
0
f(
)d
d
2
(r, a,
)
, r > a
(notar que d(
a
2
r
, a, ) =
a
r
d(a, r, ) =
a
r
d(r, a, )). Esto equivale al intercambio a r en
(V.6.21).
Problema sugerido V.6.4: En base a la discusi on anterior, resolver el problema de Neu-
mann (u = 0, con
u
r
[
r=a
= f() y f = 0) para el interior y exterior del crculo.
249
V.6 ECUACI
ON DE LAPLACE
3) La soluci on (V.6.21) puede escribirse como
u(r, ) =
_
2
0
K(r, a,
)f(
)d
,
K(r, a, ) =
a
2
r
2
2[a
2
+ r
2
2ar cos()]
, (V.6.22)
donde K(r, a, ) representa la soluci on para f() = (). Puede comprobarse que u(r, ) =
K(r, a, ) es una funci on arm onica que satisface lm
ra
K(r, a, ) = (), con lm
ra
K(r, a, ) =
0 si ,= 0 (o en general, ,= 2n, n Z) y lm
ra
K(r, a, 0) = .
Figura 43: Gr aco de K(r, a, ) para a = 1.
4) Es instructivo observar que el resultado (V.6.14), correspondiente al problema del
semiplano, en un contexto de coordenadas cartesianas, puede obtenerse tambi en directa-
mente de la soluci on de Poisson para el interior del crculo. En efecto, se debe considerar
un radio a muy grande y un punto (x, y) pr oximo a la supercie (con y medido desde el
borde del crculo), en el lmite a a r = y. En tal caso, d
2
(r, a, ) (x x
)
2
+ y
2
,
a
2
r
2
= (a + r)(a r) 2ay y ad dx
, por lo que
a
2
r
2
2
_
2
0
g()d
d
2
(r, a, )
y
f(x
)dx
(x x
)
2
+ y
2
,
con f(x
) = g(x
/a).
V.6.4.5. Arm onicos esf ericos y soluci on de Poisson para la bola tridimensional
Consideremos, ahora, la ecuaci on u = 0 en la regi on esf erica r
1
r r
2
, 0
, 0 2, donde (r, , ) son las coordenadas esf ericas usuales (denidas por
x = r sin cos , y = r sin sin , z = r cos ). Emplearemos la notaci on = (, ),
250
V.6 ECUACI
ON DE LAPLACE
con d = sin dd. En estas coordenadas,
=
2
r
2
+
2
r
r
+
r
2
=
1
sin
(sin
) +
1
sin
2
2
. (V.6.23)
La ecuaci on de Laplace en coordenadas esf ericas es, entonces,
2
u
r
2
+
2
r
u
r
+
u
r
2
= 0 . (V.6.24)
Figura 44: La regi on esf erica r
1
r r
2
.
Planteando una soluci on producto u(r, ) = R(r)Y (), se obtienen las ecuaciones
R
+
2
r
R
k
2
r
2
R = 0,
Y = k
2
Y .
con k constante. Como ya hemos discutido en III.2.5, la soluci on de la parte angular es
acotada y monovaluada s olo si k
2
= l(l +1), con l natural y Y () = Y
lm
() el arm onico
esf erico de orden l. Utilizaremos ahora los arm onicos esf ericos complejos normalizados:
Y
lm
() = l(l + 1)Y
lm
(), l m l, l = 0, 1, . . .
Y
lm
() =
(2l + 1)(l [m[)!
4(l +[m[)!
P
|m|
l
(cos )e
im
(1)
m+|m|
2
donde P
|m|
l
(x) es el polinomio asociado de Legendre (y P
0
l
(x) = P
l
(x) el polinomio de
Legendre), que satisfacen
_
s
Y
lm
()Y
m
()d =
ll
mm
(V.6.25)
251
V.6 ECUACI
ON DE LAPLACE
donde
_
s
d =
_
0
_
2
0
sin dd denota la integral sobre toda la supercie esf erica y
Y
lm
() = (1)
m
Y
lm
() en la presente convenci on de fases. Y
lm
() son las autofuncio-
nes normalizadas de
en la supercie esf erica.
Figura 45: M odulo de los arm onicos esf ericos. Se graca la supercie r = [Y
lm
(, )[ para
m = 0 y r = [
Re
Im
[Y
lm
(, )][ para m ,= 0, para l = 0, 1, 2. La orientaci on de los ejes (igual en
todos los paneles) es indicada en el ultimo panel.
La ecuaci on para la parte radial es nuevamente del tipo de Euler, con soluci on r
y
determinado por
( 1) + 2 l(l + 1) = 0 ,
cuyas soluciones son = l, = l 1. La soluci on producto es, en consecuencia, de la
forma
R(r)Y () = (ar
l
+br
l1
)Y
lm
() .
Soluciones independientes de (es decir, invariantes frente a rotaciones alrededor del eje
z) corresponden a m = 0, con l arbitrario, mientras que soluciones independientes de y
(es decir, invariantes frente a rotaciones) se obtienen s olo para l = 0, y son de la forma
u(r) = a + b/r.
252
V.6 ECUACI
ON DE LAPLACE
La soluci on general para u(r, ) es, entonces, de la forma
u(r, ) =
l=0
l
m=l
[a
lm
r
l
+
b
lm
r
l+1
]Y
lm
() . (V.6.26)
Para soluciones acotadas, si r
1
= 0, b
lm
= 0 mientras que, si r
2
, a
lm
= 0.
Consideremos ahora el problema de determinar la funci on arm onica u(r, ) en el
interior de una esfera de radio r
2
= a, conociendo sus valores en la supercie, u(a, ) =
f(). La funci on debe ser de la forma
u(r, ) =
l=0
l
m=1
a
lm
r
l
Y
lm
() . (V.6.27)
La condici on de contorno implica
u(a, ) =
l=0
l
m=1
a
lm
a
l
Y
lm
() = f() ,
que representa el desarrollo en serie de arm onicos esf ericos de f(). Teniendo en cuenta
(V.6.25), los coecientes estar an dados por
a
lm
=
1
a
l
_
s
Y
lm
()f()d. (V.6.28)
Si f() = f() a
lm
= 0 si m ,= 0 y u(r, ) =
l=0
c
l
r
l
P
l
(cos
0
), con c
l
= a
l0
_
2l+1
4
.
Si f() = c c
l
= 0 para l ,= 0 (por ortogonalidad de P
l
, l ,= 0, con P
0
= 1) y
u(r, ) = c.
En general, utilizando (V.6.28) obtenemos
u(r, ) =
_
s
[
l=0
(
r
a
)
l
l
m=l
Y
lm
()Y
lm
(
)]f(
)d
. (V.6.29)
Para evaluar esta serie recordemos, primero, el teorema de adici on para arm onicos esf eri-
cos,
l
m=l
Y
lm
()Y
lm
(
) =
2l + 1
4
P
l
(cos
0
) , (V.6.30)
donde
0
es el angulo entre las direcciones determinadas por y
, y queda denido por
cos(
0
) = n() n(
)
= cos cos
+ sin sin
cos(
) , (V.6.31)
253
V.6 ECUACI
ON DE LAPLACE
con n() = (sin cos , sin sin , cos ). La ecuaci on (V.6.30) reeja el hecho de que
el primer miembro es un escalar que depende s olo del angulo
0
entre y
. Entonces,
eligiendo = (, ) = (0, 0), y dado que Y
lm
(0, 0) =
m0
Y
l0
(0, 0) =
_
2l+1
4
(pues
P
m
l
(1) =
m0
), obtenemos
l
m=l
Y
lm
(0, 0)Y
lm
(
) = Y
l0
(0, 0)Y
l0
(
) =
2l+1
4
P
l
(cos
) ,
lo cual conduce a (V.6.30), dado que
0
=
si = 0. Asimismo, (V.6.30) reeja el
hecho de que, como funci on de , P
l
(cos
0
) es tambi en autofunci on de
con autovalor
l(l + 1) y debe ser, por lo tanto, combinaci on lineal de las autofunciones Y
lm
() con el
mismo l:
P
l
(cos
0
) =
l
m=l
c
m
Y
lm
(),
c
m
=
_
s
Y
lm
()P
l
(cos
0
)d =
4
2l+1
Y
lm
(
) .
Debemos, ahora, evaluar la serie
l=0
(2l + 1)(
r
a
)
l
P
l
(cos
0
), r < a . (V.6.32)
Para ello, usaremos el desarrollo
1
d(r, a,
0
)
=
l=0
r
l
a
l+1
P
l
(cos
0
), r < a (V.6.33)
d(r, a,
0
) = (a
2
+ r
2
2ar cos
0
)
1/2
, (V.6.34)
que puede obtenerse reconociendo que el primer miembro es una funci on arm onica tridi-
mensional de r,
0
para r < a y que por lo tanto debe ser de la forma
l=0
c
l
r
l
P
l
(cos
0
).
Para
0
= 0, d
1
(r, a, 0) = (a r)
1
= a
1
l=0
(r/a)
l
, por lo que c
l
= 1/a
l+1
. Deri-
vando, ahora, (V.6.33) respecto de r obtenemos
l=0
l
r
l
a
l+1
P
l
(cos
0
) = r
r
l=0
r
l
a
l+1
P
l
(cos
0
)
=
r(ra cos
0
)
(a
2
+r
2
2ar cos
0
)
3/2
.
Por lo tanto,
l=0
(2l+1)(
r
a
)
l
P
l
(cos
0
) =
a
2
r
2
(a
2
+ r
2
2ar cos
0
)
3/2
. (V.6.35)
254
V.6 ECUACI
ON DE LAPLACE
Utilizando (V.6.29), (V.6.30), (V.6.35) obtenemos nalmente la soluci on de Poisson para
el interior de la esfera,
u(r, ) =
a(a
2
r
2
)
4
_
s
f(
)d
d
3
(r, a,
0
)
, r < a , (V.6.36)
donde
0
est a determinado por (V.6.31) y d(r, a,
0
), dado por (V.6.34), es la distancia
entre el punto r de coordenadas polares (r, ) situado en el interior de la esfera y el punto
r
= (a,
) de la supercie.
Si = (, ) = (0, 0)
0
=
.
Comentarios:
1) Nuevamente, en el centro de la esfera (r = 0), el valor de u es el promedio de sus
valores en la supercie pues, en este caso, d = a y, entonces,
u(0) =
1
4
_
s
f(
)d
= f .
El valor de una funci on arm onica u en un punto es, en consecuencia, el promedio de los
valores en cualquier supercie esf erica con centro en ese punto, contenida en la regi on D
donde u est a denida y, por lo tanto, en cualquier esfera con centro en el punto. No puede,
pues, poseer extremos en el interior de D.
2) Problema exterior: Consideremos el problema de determinar u arm onica en el ex-
terior de la esfera (r > a), conociendo sus valores en la supercie, u(a, ). A partir de
(V.6.26) vemos que, si u es arm onica, entonces
v(r, ) =
a
r
u(
a
2
r
, )
=
l=0
l
m=l
[a
lm
a
2l+1
r
l+1
+ b
lm
r
l
a
2l+1
]Y
lm
()
es tambi en arm onica, pues es de la forma (V.6.26), y satisface v(a, ) = u(a, ). Adem as,
si u est a denida para r < a v estar a denida para r > a. Por lo, tanto, la soluci on
para el exterior de la esfera es
v(r, ) =
a
r
u(
a
2
r
, ) =
a(r
2
a
2
)
4
_
s
f(
)d
d
3
(r, a,
0
)
, r > a .
3) La soluci on (V.6.36) puede escribirse como
u(r, ) =
_
s
K(r, a,
0
)f()d,
K(r, a,
0
) =
a(a
2
r
2
)
4d
3
(r, a,
0
)
, (V.6.37)
255
V.6 ECUACI
ON DE LAPLACE
donde K(r, a,
0
) es la soluci on para f() = (
) (
)(
)/ sin().
Problema sugerido V.6.5 : Comprobar que K es arm onica y satisface lm
ra
K(r, a,
0
) =
(
).
V.6.4.6. Arm onicos cilndricos. Soluci on de Poisson en el cilindro
Consideremos la ecuaci on u = 0 en el interior de un cilindro de radio a y altura b, o
sea 0 r a, 0 2, 0 z b. En coordenadas cilndricas,
=
(r,)
+
2
z
2
,
con
(r,)
dado por (V.6.15), por lo que la ecuaci on es
2
u
r
2
+
1
r
u
r
+
1
r
2
2
u
2
+
2
u
z
2
= 0 . (V.6.38)
Figura 46: El cilindro 0 r a, 0 z b.
Planteando una soluci on del tipo u = v(r, )Z(z) obtenemos las ecuaciones
Z
= k
2
Z,
(r,)
v = k
2
v .
La soluci on de la primera ecuaci on es
Z(z) = E cosh(kz) + F sinh(kz) .
Escribiendo v = R(r)(), la segunda ecuaci on implica
= n
2
, R
+
R
r
+ (k
2
n
2
r
2
)R = 0 ,
256
V.6 ECUACI
ON DE LAPLACE
cuyas soluciones generales son
() = Ae
in
+Be
in
, R(r) = CJ
n
(kr) + DY
n
(kr) ,
donde J
n
, Y
n
son las funciones de Bessel de primera y segunda especie (Ver III.2.7). En
el presente caso, la condici on de R acotado para r 0 implica D = 0, mientras que la
de monovaluada, n entero.
Consideremos, por ejemplo, u = 0 en los bordes lateral (u(a, , z) = 0) e inferior
(u(r, , 0) = 0), con u(r, , b) = f(r, ). Esto implica k = k
nm
/a, con k
nm
los ceros de
J
n
(J
n
(k
nm
) = 0) y E = 0. Recordando que, para n entero, J
n
(x) = (1)
n
J
n
(x), la
soluci on general puede escribirse como
u(r, , z) =
n=
m=1
A
nm
J
n
(k
nm
r/a)e
in
sinh(k
nm
z/a) .
Para z = b, esto conduce al desarrollo de Fourier-Bessel de u(r, , b) = f(r, ). Recor-
dando que
_
a
0
_
2
0
J
n
(k
nm
r
a
)J
n
(k
n
r
a
)e
i(nn
)
rdrd
=
nn
mm
a
2
J
n
(k
nm
)
2
, (V.6.39)
obtenemos
A
nm
=
_
a
0
_
2
0
f(r, )J
n
(k
nm
r/a)e
in
rdrd
a
2
J
n
(k
nm
)
2
sinh(k
nm
b/a)
.
En forma an aloga se resuelve el caso con dato en la base. En cambio, si el dato es
u(a, , z) = f(, z), con u(r, , 0) = u(r, , b) = 0, tenemos k = im/b, con m entero, y
debemos plantear una soluci on de la forma
u(r, , z) =
m=1
n=
A
nm
I
n
(mr/b)e
in
sin(mz/b) , (V.6.40)
donde I
n
(x) = (i)
n
J
n
(ix) es la funci on de Bessel modicada de primera especie. Se
obtiene un desarrollo en serie de Fourier bidimensional para u(a, , z) = f(, z).
Problema sugerido V.6.6 : Determinar la soluci on del problema u = 0 en el cilindro
r a, 0 z b, si u(r, , 0) = f(r, ), u(r, , b) = g(r, ) y u(a, , z) = h(, z).
V.6.5. M etodos de variable compleja para problemas bidimensiona-
les
En el caso de dos dimensiones, toda funci on u(x, y) arm onica en una regi on D es la
parte real o imaginaria de una funci on analtica en D:
u(x, y) = Re[f(z)], z = x + iy .
257
V.6 ECUACI
ON DE LAPLACE
Recordemos que f(z) es analtica si f
(z) = lm
z0
f(z+z)f(z)
z
es independiente de la
direcci on de z. En tales condiciones, f
x
(z) = f
(z), f
y
(z) = f
(z)i, lo que implica
f = f
xx
(z) + f
yy
(z) = f
(z) f
(z) = 0. Escribiendo
f(z) = u(x, y) + iv(x, y) ,
con u y v reales, tanto u como v son entonces arm onicas. La identidad f
(z) = f
x
(z) =
if
y
(z) conduce a las condiciones de Cauchy-Riemann, u
x
= v
y
, u
y
= v
x
de las que
se desprende nuevamente que u
xx
+ u
yy
= 0.
Si, por ejemplo, u(x, y) representa una temperatura, las curvas u(x, y) = c son las
isotermas mientras que las curvas v(x, y) = c
son las correspondientes lneas de ujo, ya
que los gradientes de u y v son perpendiculares: (u
x
, u
y
)(v
x
, v
y
) = (u
x
, u
y
)(u
y
, u
x
) =
0.
Por ejemplo, la parte real e imaginaria de z
k
= r
k
(cos k +i sin k) y ln z = ln r +i
son los arm onicos circulares, mientras que las de e
kz
= e
kx
(cos ky + i sin ky), e
ikz
=
e
ky
(cos kx + i sin kx), son los arm onicos rectangulares. En el caso del rect angulo,
sin(kx) sinh(ky) = Im[cos(kz)] =
1
2
Im(e
ikz
+e
ikz
) .
Sabemos que, si f es analtica en una regi on D y C es una curva cerrada contenida en D,
_
C
f(z)dz = 0 .
Adem as, f(z) puede escribirse como la integral
f(z) =
1
2i
_
C
f(z
)
z
z
dz
, (V.6.41)
donde C es cualquier curva cerrada que circunda a z, dentro de la regi on D donde f es
analtica. De esta forma, para z D, f(z) queda completamente determinada por los
valores que toma f en C.
V.6.5.1. Soluci on de Poisson para el interior del disco: Obtenci on con m etodos de
variable compleja
La soluci on de Poisson (V.6.21) puede tambi en obtenerse a partir de (V.6.41). Si C es
un crculo de radio a z
= ae
i
, con dz
= iz
y
f(z) =
1
2
_
2
0
f(z
)z
z
d
, z
= ae
i
, [z[ < a (V.6.42)
Para obtener (V.6.21) es necesario sin embargo expresar la parte real de f(z) en t erminos
de la parte real de f(z
). Deniendo z
1
= a
2
/z
= z
/z
, tenemos [z
1
[ > a si [z[ < a
y entonces, para el mismo crculo C,
0 =
1
2i
_
C
f(z
)
z
z
1
dz
=
1
2
_
2
0
f(z
)z
. (V.6.43)
258
V.6 ECUACI
ON DE LAPLACE
Restando (V.6.43) de (V.6.42) obtenemos
f(z) =
1
2
_
2
0
f(z
)
[z
[
2
[z[
2
[z
z[
2
d
=
a
2
r
2
2
_
2
0
f(ae
i
)d
d
2
(a, r,
)
,
donde z = re
i
y d
2
(a, r,
) = [z
z[
2
. La parte real (o imaginaria) de esta expresi on
nos da la f ormula de Poisson (V.6.21). Notemos que
a
2
r
2
d
2
(a, r,
)
=
[z
[
2
[z[
2
[z
z[
2
= Re[
z
+ z
z
z
] . (V.6.44)
V.6.5.2. Transformaciones conformes
Recordemos que la transformaci on
w = f(z) = u + iv, f
(z) ,= 0 ,
con f(z) analtica, mapea una regi on D del plano z en una regi on S del plano w. Se dice
que la transformaci on se dice que es conforme, pues conserva los a ngulos entre curvas:
para una curva z(t), que se transforma en la curva w(t) = f(z(t)), tenemos
dw
dt
= f
(z)
dz
dt
y, por lo tanto,, arg
dw
dt
= arg[f
(z)] +arg[
dz
dt
], lo que representa una traslaci on de los argu-
mentos en arg[f
(z)] (suponiendo que f
(z) ,= 0). No obstante, como [dw[ = [f
(z)[[dz[,
las distancias se dilatan localmente en [f
(z)[.
Si g(w) es analtica en S g(f(z)) ser a analtica en D. Por lo tanto, Re[g(f(z))]
ser a una funci on arm onica en D. Esto indica que, una vez conocida la soluci on arm onica
Re[g(w)] en S, podemos hallar la soluci on en D mediante una transformaci on conforme.
Por ejemplo, la transformaci on
w = e
z
= e
x
(cos y + i sin y)
mapea el rect angulo 0 x a, 0 y b en el sector circular 1 r e
a
, 0 b.
En esta regi on hemos visto que los arm onicos son de la forma w
k
= r
k
(cos k +i sin k)
para k ,= 0.
Los arm onicos rectangulares son, pues, la parte real e imaginaria de
(e
z
)
k
= e
kz
= e
kx
(cos ky + i sin ky),
donde k puede ser real o complejo, resultado que hemos obtenido por separaci on de varia-
bles (adem as, ln w = ln r +i y
1
2
Im(ln w)
2
= ln r (arm onicos circulares para k = 0) se
transforman en ln e
z
= z = x +iy, y
1
2
Im[z
2
] = xy, que son los arm onicos rectangulares
para k = 0).
259
V.6 ECUACI
ON DE LAPLACE
Como ejemplo especco, la transformaci on
w = e
z/b
= e
x/b
[cos(y/b) i sin(y/b)]
mapea la franja semi-innita x 0, 0 y b en el sector circular 0 r 1,
0, donde la soluci on general acotada est a dada por (V.6.18) con B
n
= 0. La
soluci on en la franja se obtiene, entonces, reemplazando
r = [e
z/b
[ = e
x/b
, = arg(e
z/b
) = y/b
en (V.6.18), con r
n/
= e
nx/b
, lo que conduce inmediatamente a la soluci on (V.6.12).
Como segundo ejemplo, obtendremos la f ormula (V.6.14) para la funci on arm onica
en el semiplano a partir de la f ormula de Poisson (V.6.21), utilizando una transformaci on
conforme que mapee el semiplano superior en el interior de un crculo de radio 1. Una tal
transformaci on es
w =
z i
z + i
.
En efecto, si z = x (y = 0) [w[ = [
xi
x+i
[ = 1. Adem as, (0, i) se transforma en (0, 0), de
modo que es el semiplano superior el que pasa al interior del crculo (recordemos que los
llamados mapeos lineales w =
az+b
cz+d
con ad bc ,= 0 mapean rectas y crculos en rectas y
crculos). Tenemos, para z
= (x
, 0),
Re[
w
+ w
w
w
] = Re[i
1 +zz
z z
] =
y(1 +x
2
)
[z
z[
2
d
=
dw
iw
=
2dz
1 +z
2
=
2dx
1 +x
2
, (V.6.45)
con [z
z[
2
= (xx
)
2
+y
2
. Por lo tanto, utilizando (V.6.21), (V.6.44) y las expresiones
anteriores,
g(w(z)) =
1
2
_
2
0
g(w
)Re[
w
+w
w
w
]d
=
y
g(w(x
))dx
(x x
)
2
+ y
2
.
La parte real nos da el resultado (V.6.14) para u(x, y) = Re[g(w(z))], con g(w(x
)) =
u(x
, 0) = f(x
).
V.6.6. Problemas de autovalores para el operador de Laplace
V.6.6.1. Propiedades generales
Como demostramos en la secci on V.6.3, el operador de Laplace, con su dominio de-
nido por cualquiera de los tres tipos de condiciones de contorno all estudiados, es auto-
adjunto. Como sabemos de nuestro estudio del problema de Sturm-Liouville (ver III.1),
el car acter autoadjunto del operador conduce a propiedades deseables de sus autovalores
y autofunciones, algunas de las cuales demostramos a continuaci on.
260
V.6 ECUACI
ON DE LAPLACE
Teorema V.6.4 Las autofunciones correspondientes a autovalores distintos son ortogo-
nales.
Demostraci on: Si u
n
=
n
u
n
y u
m
=
m
u
m
, multiplicando la primera ecua-
ci on por u
m
, la segunda por u
n
y rest andolas, se tiene:
u
m
u
n
u
n
u
m
= (
m
n
)u
n
u
m
.
Ahora, integrando sobre la regi on D y usando nuevamente en forma repetida el teo-
rema de Gauss, tenemos:
(
m
n
)
_
D
u
n
u
m
dV =
_
D
(u
n
u
m
u
m
u
n
)dV =
_
D
_
u
n
u
m
n
u
m
u
n
n
_
dV = 0 ,
donde hemos usado que el t ermino de borde se anula para cualquiera de los tres tipos
de condiciones de contorno que estamos tratando. En consecuencia, hemos demostrado
que, si
m
,=
n
las correspondientes autofunciones son ortogonales.
Tales autofunciones no s olo son ortogonales, sino que, adem as, constituyen un sistema
completo, que permite desarrollar cualquier funci on que satisfaga las mismas condiciones
de contorno en una serie absoluta y uniformemente convergente de tales autofunciones.
La demostraci on de esta propiedad es similar a la del caso de una dimensi on (ver, por
ejemplo, [9]).
Teorema V.6.5 Cuando el dominio del operador de Laplace se dene con cualquiera de
las condiciones de contorno antes presentadas, sus autovalores resultan reales
Demostraci on: Supongamos que = + i, con , R y ,= 0 es un autovalor
complejo, correspondiente a una autofunci on u. Entonces, conjugando la ecuaci on satis-
fecha por u vemos que
= i debe ser autovalor correspondiente a la autofunci on u.
Por el teorema anterior, u y u son ortogonales, es decir,
_
D
[u[
2
dV = 0, lo cual fuerza
a u a ser id enticamente nula y contradice la hip otesis del teorema.
Este teorema tambi en muestra que las autofunciones siempre pueden elegirse reales.
En efecto, si una funci on compleja es autofunci on con un cierto autovalor asociado, su
compleja conjugada es autofunci on con el mismo autovalor asociado y, en virtud de la
linealidad del operador, pueden tomarse combinaciones reales de ambas como autofun-
ciones. En otras palabras, tanto la parte real como imaginaria ser an autofunciones con el
mismo autovalor si son no nulas.
261
V.6 ECUACI
ON DE LAPLACE
Es f acil mostrar, ahora, que los autovalores de con las condiciones de Dirichlet o
Neumann son no negativos: Si u = u con u , reales, entonces
_
D
u
2
dV =
_
D
uudV =
_
D
u
u
n
dS +
_
D
[u[
2
dV
= 0 +
_
D
[u[
2
dV 0 (V.6.46)
lo cual muestra que 0.
Finalmente, mencionamos que, en las condiciones de los teoremas anteriores, puede
demostrarse que existe un autovalor mnimo del operador y que los autovalores de
dicho operador forman una secuencia ordenable y divergente por valores positivos [9].
Presentaremos, a continuaci on, ejemplos de resoluci on del problema de autovalores
para el operador de Laplace, con condiciones de contorno de Dirichlet, en diversas geo-
metras. En realidad, consideraremos las autofunciones del operador ya que, como
veremos, el mismo resultar a, en todos los casos a considerar, denido positivo.
V.6.6.2. Autovalores del laplaciano en un rect angulo
Buscamos la soluci on al problema
u(x, y) =
_
2
x
2
+
2
y
2
_
u(x, y) = u(x, y)
en la regi on D = (x, y) R
2
/0 < x < a, 0 < y < b, con las condiciones de contorno
u(0, y) = u(a, y) = u(x, 0) = u(x, b) = 0.
A tal n, proponemos una soluci on en variables separadas de la forma u(x, y) =
X(x)Y (y). Reemplazando en la ecuaci on de autovalores tenemos:
X
X
+
Y
Y
= .
Como ya hemos explicado, la ecuaci on anterior implica
X
=
Y
Y
+ = ,
donde es una constante a determinar.
La ecuaci on correspondiente a la funci on X(x) es
X
+ X = 0 .
Es f acil vericar que no existen soluciones no triviales que satisfagan las condiciones
de contorno en ambos extremos del intervalo [0, a] para = 0. Para ,= 0 la solu-
ci on general es de la forma X(x) = Asin
x + Bcos
x. La condici on de con-
torno u(0, y) = 0 y exige B = 0. Por su parte, la condici on u(a, y) = 0 y determina
262
V.6 ECUACI
ON DE LAPLACE
n
=
n
a
, n = 1, 2, . . . N. Notar que la consideraci on de los valores enteros negati-
vos de n conducira a autofunciones linealmente dependientes de las seleccionadas. Por
lo tanto, tenemos X
n
(x) = A
n
sin
n
a
x, n = 1, 2, . . . N.
Habiendo determinado los posibles valores de , debemos a un resolver la ecuaci on
para la funci on Y (y), que se escribe como
Y
(y) +
_
_
n
a
_
2
_
Y (y) = 0 .
Como en el caso anterior, las condiciones de contorno hacen que no existan soluciones
distintas de la trivial para =
_
n
a
_
2
. Para los restantes valores de la soluci on general
es de la forma Y (y) = C sin
_
_
_
n
a
_
2
_
y + Dcos
_
_
_
n
a
_
2
_
y. La condici on
de contorno u(x, 0) = 0 x exige D = 0, mientras que la condici on u(x, b) = 0 x
determina los valores admisibles
_
nm
_
n
a
_
2
= m, n, m = 1, 2, . . . N.
Resumiendo, las autofunciones buscadas son de la forma
u
nm
(x, y) = A
nm
sin
n
a
x sin
m
b
y (V.6.47)
y sus correspondientes autovalores son
nm
=
_
n
a
_
2
+
_
m
b
_
2
, (V.6.48)
con n, m = 1, 2, . . . N.
Notar que, seg un lo esperado, los autovalores son reales, admiten un ordenamiento y
constituyen una secuencia divergente por valores positivos.
Problema sugerido V.6.7: Vericar que las autofunciones correspondientes a distin-
tos autovalores son ortogonales y normalizarlas.
263
V.6 ECUACI
ON DE LAPLACE
Figura 47: Las primeras seis autofunciones u
nm
(x, y) del Laplaciano en un cuadrado de lado
1, dadas por (V.6.47). Los autovalores son
nm
=
2
(n
2
+m
2
). Estas autofunciones representan,
por ejemplo, los primeros modos normales de vibraci on de una membrana cuadrada ja en los
bordes, siendo las frecuencias de vibraci on proporcionales a
nm
.
(n, m) = (1, 1)
(1, 2) (2, 1)
(2, 2)
(1, 3) (3, 1)
264
V.6 ECUACI
ON DE LAPLACE
V.6.6.3. Autovalores del laplaciano en un disco y en un cilindro
Pasemos, ahora, a considerar el problema de autovalores para el operador laplaciano,
con condiciones de contorno de tipo Dirichlet, en un disco de radio a:
u(r, ) =
_
1
r
r
_
r
r
_
+
1
r
2
2
_
u(r, ) = u(r, )
con la condici on de contorno u(a, ) = 0 y la condici on de u acotada en r = 0. Pediremos,
adem as, que las autofunciones sean univaluadas, es decir, peri odicas de perodo 2 en la
variable . La ecuaci on precedente puede reescribirse como:
_
r
r
_
r
r
_
+
2
2
_
u(r, ) = r
2
u(r, ) .
Para resolverla, usamos nuevamente el m etodo de separaci on de variables, proponien-
do u(r, ) = R(r)(). De reemplazar esta expresi on en la ecuaci on anterior resulta:
_
1
R(r)
r
d
dr
_
r
dR(r)
dr
_
+ r
2
_
=
1
()
d
2
d
2
() = ,
donde es, nuevamente, la constante de separaci on, que determinaremos a continuaci on.
La ecuaci on satisfecha por () admite un modo cero ( = 0) constante, ya que el mismo
es trivialmente peri odico. La soluci on general para ,= 0 est a dada por:
() = Ae
i
.
La condici on de periodicidad (univaluaci on) exige que = n
2
, n = 1, 2, . . .. De
modo que, incluyendo el autovalor nulo, tenemos = n
2
, n Z.
Pasemos, ahora, a la ecuaci on para R(r). Debemos resolver:
_
r
d
dr
_
r
d
dr
_
+ (r
2
n
2
)
_
R(r) = 0 .
El cambio de variable z =
r conduce a la ecuaci on de Bessel, cuya soluci on es
R(r) = B
n
J
n
(
r) + C
n
Y
n
(
r) .
La condici on de acotaci on en el origen exige que C
n
= 0 n. Dado que J
n
=
(1)
n
J
n
, podemos elegir la parte radial de las autofunciones como J
|n|
para n < 0. Final-
mente, la condici on de contorno en x = a determina
nm
=
_
k
nm
a
_
2
, n = 0, 1, . . . , m =
1, 2, . . ., donde j
nm
es la m- esima raz no nula de la funci on de Bessel de orden [n[.
Resumiendo: para este problema tenemos autofunciones de la forma
u
n,m
(r, ) = A
n,m
e
i n
J
|n|
(k
nm
r/a) (V.6.49)
con autovalores
nm
=
_
k
nm
a
_
2
, n = 0, 1, . . . , m = 1, 2, . . . . (V.6.50)
Notar que podran, tambi en, elegirse autofunciones reales, tomando funciones seno y
coseno en lugar de exponenciales complejas (que corresponden a la parte real e imaginaria
de (V.6.49)).
265
V.6 ECUACI
ON DE LAPLACE
Figura 48: Las primeras seis autofunciones u
nm
(r, ) del Laplaciano en el disco r < 1, dadas
por (V.6.49) (se toman las partes real e imaginaria si n 1). Los autovalores son
nm
= k
2
nm
5,78; 14,68; 26,37; 30,47. Representan los modos normales de vibraci on de un membrana circular
ja en los bordes, siendo las frecuencias de vibraci on k
nm
. N otese que los primeros autovalores
de en un cuadrado de igual area son
11
6, 28;
21
15, 71
22
25, 13;
31
31, 42.
(n, m) = (0, 1)
(1, 1)
r
(1, 1)
i
(2, 1)
r
(2, 1)
i
(0, 2)
266
V.6 ECUACI
ON DE LAPLACE
N otese que, nuevamente, los autovalores resultan reales y positivos y pueden ordenar-
se a partir de un autovalor mnimo.
Problema sugerido V.6.8: Verique que las autofunciones obtenidas son ortogonales
(con la adecuada medida de integraci on en coordenadas polares) cuando corresponden a
autovalores distintos. Determine el factor de normalizaci on.
Problema sugerido V.6.9: Resuelva el problema de autovalores para un cilindro de
radio a y altura b, con condici on de contorno Dirichlet homog eneas en toda su frontera.
Muestre que las autofunciones tienen la expresi on u
nml
= A
nml
e
i n
J
|n|
(
k
nm
r
a
) sin
lz
b
y
sus correspondientes autovalores son
nml
=
_
k
nm
a
_
2
+
_
lz
b
_
2
, donde n = 0, 1, . . . , m, l =
1, 2, . . ..
V.6.6.4. Autovalores del laplaciano en la bola tridimensional
Finalmente, resolvamos el problema de autovalores para (menos) el operador de La-
place en una bola tridimensional (ver nota 2 a pie de p agina, en la secci on III.2.4) de radio
a, con condiciones Dirichlet sobre la esfera que constituye su frontera.
u(r, , ) = u(r, , ) ,
Esta ecuaci on, escrita en coordenadas esf ericas es
1
r
2
r
_
r
2
u
r
_
+
1
r
2
sin
_
sin
u
_
+
1
r
2
sin
2
2
u
2
+ u = 0 , (V.6.51)
con 0 r r
0
, 0 2 y 0 .
Proponiendo una soluci on en variables separadas u(r, , ) = R(r)Y (, ), tenemos:
1
R(r)
d
dr
_
r
2
dR(r)
dr
_
+ r
2
=
1
Y (, )
,
Y (, ) , (V.6.52)
donde
,
=
1
r
2
sin
_
sin
_
+
1
r
2
sin
2
2
. (V.6.53)
En la ecuaci on (V.6.52), el miembro izquierdo s olo depende de la variable r, mientras
el miembro derecho s olo depende de las variables angulares. Para que la igualdad sea
v alida para todos los valores de las variables es, entonces, necesario que ambos miembros
sean constantes. Llamaremos a esa constante ( + 1).
Ya hemos estudiado la ecuaci on para la parte angular del Laplaciano (ver III.2.5) y
sabemos que s olo admite soluciones en serie convergentes para = l N+0. Dichas
soluciones son los arm onicos esf ericos Y
lm
.
267
V.6 ECUACI
ON DE LAPLACE
La ecuaci on para R(r) se escribe
R
l
+
2
r
R
l
+
_
l(l + 1)
r
2
_
R
l
= 0 .
Mediante la sustituci on R
l
(r) = r
1/2
R
l
(r) se encuentra la ecuaci on de Bessel:
l
+
1
r
l
+ [
(l + 1/2)
2
r
2
]
R
l
= 0 ,
cuya soluci on general, seg un hemos visto al estudiar las funciones de Bessel, es
R
l
(r) =
A
l
J
l+1/2
(kr) +
B
l
Y
l+1/2
(kr), k =
.
Por lo tanto,
R
l
(r) = r
1/2
R
l
(r) = A
l
j
l
(kr) +B
l
y
l
(kr) ,
donde A
l
=
_
2k/
A
l
, B
l
=
_
2k/
B
l
. Las funciones
j
l
(x) =
_
2
J
l+1/2
(x)
x
, y
l
(x) =
_
2
Y
l+1/2
(x)
x
,
son las denominadas funciones de Bessel esf ericas. Dado que J
(x) x
para x 0,
j
l
(x) permanece nita para x 0.
Puede verse, a partir de la denici on de las funciones de Bessel, que
j
0
(kr) =
sin kr
kr
, y
0
(kr) =
cos kr
kr
.
Estas son, pues, las dos soluciones linealmente independientes con simetra esf erica (l =
0). En particular, y
0
(kr) ij
0
(kr) = e
ikr
/r.
En general, puede demostrarse que
j
l
(x) = x
l
(
1
x
d
dx
)
l
_
sin(x)
x
_
, y
l
(x) = x
l
(
1
x
d
dx
)
l
_
cos(x)
x
_
.
En todo R
3
, k es real arbitrario. En cambio, en una esfera de radio a (b = 0) con la
condici on de contorno R
l
(a) = 0 tendremos B
l
= 0 y j
l
(ka) = 0, por lo que k = k
s
ln
/a,
siendo k
s
ln
el n- esimo 0 de j
l
(x). Las autofunciones son, en tal caso,
u
nlm
(r, ) = j
l
(k
s
ln
r/a)Y
lm
() (V.6.54)
y los autovalores
ln
= (k
s
ln
)
2
/a
2
. (V.6.55)
268
V.6 ECUACI
ON DE LAPLACE
V.6.7. Funci on de Green del Laplaciano
V.6.7.1. Denici on y desarrollo en autofunciones para el problema de Dirichlet
Consideremos la ecuaci on general inhomog enea
u = f(r) (V.6.56)
en una cierta regi on D con borde D, con la condici on de contorno u(r) = 0 en el borde
D. Sean u
k
(r), k = 1, 2, . . ., las autofunciones normalizadas de en D con la anterior
condici on de contorno, denidas por
u
k
(r) =
k
u
k
(r), u
k
(r) = 0 si r D (V.6.57)
_
D
u
k
(r)u
k
(r)dV =
kk
, (V.6.58)
donde el autovalor
k
es real y positivo (suponiendo D nito). Podemos desarrollar la
soluci on u de (V.6.56) y la carga o fuente f(r) en la forma
u(r) =
k
c
k
u
k
(r), f(r) =
k
f
k
u
k
(r) ,
con
c
k
=
_
D
u
k
(r)u(r)dV, f
k
=
_
D
u
k
(r)f(r)dV .
Adem as, utilizando dos veces la identidad de Green (ver Ap endice B y [19]),
_
D
u
k
udV =
_
D
(u
k
u
n
u
u
k
n
)dS +
_
D
uu
k
dV (V.6.59)
=
_
D
(u
k
u
n
u
u
k
n
)dS
k
c
k
, (V.6.60)
donde
n
denota derivada normal. La integral de borde se anula si u
k
= u = 0 en D.
Multiplicando la ecuaci on (V.6.56) por u
k
(r) e integrando obtenemos, entonces,
k
c
k
= f
k
, (V.6.61)
de donde
c
k
= f
k
/
k
.
En consecuencia, la soluci on puede expresarse como
u(r) =
k
f
k
u
k
(r)
k
=
_
D
G(r, r
)f(r
)dV
, (V.6.62)
donde
G(r, r
) =
k
u
k
(r)u
k
(r
k
(V.6.63)
269
V.6 ECUACI
ON DE LAPLACE
es la funci on de Green. Notemos que tal desarrollo tiene sentido, dado que el problema
que estamos tratando no admite modos cero.
Si f(r) = (rr
0
) u(r) = G(r, r
0
), por lo que la funci on de Green queda denida
por la ecuaci on
G(r, r
) = (r r
), G(r, r
) = 0 si r D. (V.6.64)
G(r, r
) es, por lo tanto, el potencial electrost atico o temperatura en r originado por
una carga o fuente puntual en r
, y que se anula en el borde D (lo que corresponde a un
borde conectado a tierra para el potencial o mantenido a temperatura 0). Notemos que
G(r, r
) = G(r
, r)
(pues G es real), de modo que la temperatura en r debida a una fuente en r
es igual a
la temperatura en r
debida a una fuente en r, independientemente de la forma de D o
de las simetras geom etricas particulares del problema. Esto es consecuencia del car acter
autoadjunto de .
Matem aticamente, G(r, r
) puede considerarse el n ucleo (kernel), en la base de coor-
denadas, del operador lineal integral G, el cual es el inverso del operador diferencial .
Escribiendo u(r) =
_
D
(r r
)u(r
)dV
, la acci on de sobre u puede expresarse como
u(r) =
_
D
(r, r
)u(r
)dV
, (r, r
) = (r r
) .
Desarrollando en la base de autofunciones, (r r
) =
k
a
k
u
k
(r), obtenemos a
k
=
_
D
u
k
(r)(r r
)dV = u
k
(r
) y por lo tanto,
(r r
) =
k
u
k
(r)u
k
(r
)
(r, r
) =
k
u
k
(r)u
k
(r
) , (V.6.65)
en concordancia con el desarrollo (V.6.63). En la base de autofunciones, y G que-
dan, entonces, representados por matrices diagonales de elementos
kk
=
k
kk
,
G
kk
=
1
kk
, mientras que queda representado por la matriz identidad (de elementos
kk
). De esta forma, G =
1
. En esta base, u y f quedan representados por vectores
columna de elementos u
k
, f
k
, y la ecuaci on diferencial (V.6.56) por la ecuaci on matricial
kk
c
k
= f
k
, que conduce a la ecuaci on (V.6.61).
Mediante la funci on de Green es posible, tambi en, resolver la ecuaci on de Laplace
conociendo los valores de u en el borde,
u = 0, u(r) = g(r) si r D. (V.6.66)
Multiplicando nuevamente la ecuaci on anterior por u
k
(r) e integrando, obtenemos, utili-
zando (V.6.60),
_
D
u
k
udV =
_
D
g(r)
u
k
n
dS
k
c
k
= 0 ,
270
V.6 ECUACI
ON DE LAPLACE
de donde
c
k
=
1
k
_
D
g(r)
u
k
n
dS .
La soluci on puede, en consecuencia, expresarse como
u(r) =
_
D
G(r, r
)
n
g(r
)dS
,
con
G(r, r
)
n
k
1
k
u
k
(r)
u
k
(r
)
n
la derivada normal (respecto de r
) de la funci on de Green.
La soluci on formal al problema general
u = f(r), u(r) = g(r) si r D
es, entonces,
u(r) =
_
D
G(r, r
)f(r
)dV
_
D
G(r, r
)
n
g(r
)dS . (V.6.67)
Las mismas expresiones rigen si reemplazamos por un operador L = + q(r),
con q derivable en D, siempre y cuando L no poseea autovalores nulos (lo cual queda ga-
rantizado si q(r) > 0 en D). Entonces, u
k
(r) son las autofunciones de L. V ease, tambi en,
Ap endice A.
Como ejemplo directo del desarrollo en autofunciones (V.6.63), la funci on de Green
para el rect angulo 0 x a, 0 y b es
G(r, r
) =
4
ab
n=1
m=1
sin(k
n
x) sin(k
n
x
) sin(l
m
y) sin(l
m
y
)
k
2
n
+l
2
m
=
2
a
n=1
sin(k
n
x) sin(k
n
x
) sinh(k
n
y) sinh[k
n
(b y
)]
k
n
sinh(k
n
b)
,
donde r = (x, y), r
= (x
, y
), k
n
= n/a, l
m
= m/b, n, m = 1, 2, . . . y la ultima
expresi on es v alida para y < y
. Hemos utilizado los m etodos dados en el Ap endice C
para evaluar la suma sobre m. Reobtenemos as el resultado (V.6.11) para el problema del
rect angulo.
V.6.7.2. Funciones de Green en dos, tres y n dimensiones
Consideremos ahora el problema de determinar la funci on de Green del Laplaciano
en el espacio completo. Comenzaremos con el caso tridimensional. Las autofunciones
normalizadas de en todo R
3
son
u
k
(r) =
e
ik
x
x
2
e
ik
y
y
2
e
ik
z
z
2
=
e
ikr
(2)
3/2
, (V.6.68)
271
V.6 ECUACI
ON DE LAPLACE
donde k = (k
x
, k
y
, k
z
) y k r = k
x
x +k
y
y + k
z
z. Satisfacen
u
k
(r) = k
2
u
k
(r), k
2
= [k[
2
= k
2
x
+ k
2
y
+ k
2
z
_
u
k
(r)u
k
(r)d
3
r =
1
(2)
3
_
e
ir(kk
)
d
3
r = (k k
) ,
donde la integral denota valor principal sobre todo el espacio, d
3
r = dxdydz y
(k k
) = (k
x
k
x
)(k
y
k
y
)(k
z
k
z
) .
Utilizando el desarrollo en autofunciones, la funci on de Green puede determinarse como
G(r, r
) =
1
(2)
3
_
e
ik(rr
)
[k[
2
d
3
k
=
1
(2)
2
_
0
k
2
dk
_
0
e
ikr cos()
k
2
sin d
=
2
(2)
2
_
0
sin(kr)
kr
dk =
1
4r
, (V.6.69)
donde r = [r r
[, k (r r
) = kr cos y hemos utilizado el resultado (deducido al
introducir la transformada de Fourier)
_
0
sin(x)
x
dx =
2
.
El resultado (V.6.69) puede tambi en obtenerse en forma m as simple y fsica a partir
del teorema de Gauss (o sea, la identidad de Green (V.6.59) para u
k
= 1). Obviamente,
debido a la invariancia traslacional y rotacional de en el espacio completo, G(r, r
)
ser a una funci on unicamente de la distancia [r r
[ , es decir,
G(r, r
) = G([r r
[) .
Considerando ahora una bola R centrada en el origen de radio r > 0 arbitrario, a partir de
G = (r) obtenemos, dado que
_
R
(r)dV = 1,
_
R
GdV =
_
R
G
n
dS = G
(r)4r
2
= 1 ,
con r = [r[, de donde G
(r) = 1/(4r
2
) y entonces,
G(r) =
1
4r
,
donde hemos impuesto la condici on de contorno lm
r
G(r) = 0.
Notemos que
1
r
es la unica funci on arm onica (adem as de la funci on constante) que es
independiente de en tres dimensiones, de modo que, necesariamente, G(r) r
1
para
r > 0, dado que G(r) = 0 si r ,= 0.
272
V.6 ECUACI
ON DE LAPLACE
En dos dimensiones, procediendo de la misma manera obtenemos G
(r)2r = 1, de
donde G
(r) =
1
2r
y
G(r) G(r
0
) =
ln(r/r
0
)
2
, r > 0 .
Recordemos que, en dos dimensiones, ln r es la unica funci on arm onica (adem as de una
constante) independiente de . No es, entonces, posible satisfacer la condici on G(r) <
(y, por lo tanto, G(r) 0) para r . Lo mismo ocurre en una dimensi on donde,
a partir de G
(r)2 = 1 obtenemos G(r) G(r
0
) =
1
2
(r r
0
) (o sea, G(x, x
) =
1
2
[x x
[ + c).
Generalizaci on a n > 3 dimensiones: Utilizando el teorema de Gauss en la forma
anterior para una bola n-dimensional R centrada en el origen, obtenemos
_
R
GdV
n
=
_
S
G
n
dV
n1
= G
(r)
n
r
n1
= 1, donde
n
=
2
n/2
(n/2)
(V.6.70)
es el area de la hiperesfera de radio 1 (S
n1
) inmersa en un espacio de dimensi on n.
(
2
= 2,
3
= 4,
4
= 2
2
). Por lo tanto, de G
(r) = 1/(
n
r
n1
) se obtiene,
imponiendo lm
r
G(r) = 0,
G(r) =
1
n
(n 2)r
n2
, n > 2 . (V.6.71)
Esto implica, en particular, que la soluci on del problema de Dirichlet en el interior de la
bola n-dimensional,
u = 0, [r[ < a, u(r) = g(r), [r[ = a ,
es
u(r) =
_
R
G
n
g(r
)dS
, (V.6.72)
con dS
= r
n1
d
n
y d
n
el diferencial de angulo s olido n-dimensional. En el centro
r = 0 obtenemos entonces
G
n
= G
(r
) =
1
n
r
n1
y, por lo tanto,
u(0) =
1
n
_
R
g(
n
)d
n
= g
R
. (V.6.73)
Es decir, u(0) es el promedio de los valores que toma en el borde de la bola. Esto de-
muestra, nuevamente, que una funci on arm onica no constante no puede tener m aximos ni
mnimos locales en ninguna dimensi on.
Problema sugerido V.6.10: Demostrar el resultado (V.6.70). Sugerencia: Integrar la fun-
ci on e
r
2
en R
n
, utilizando coordenadas cartesianas y coordenadas polares.
273
V.6 ECUACI
ON DE LAPLACE
V.6.7.3. Funci on de Green para el semiplano
En general, la funci on de Green para una regi on D puede obtenerse sumando a la
funci on de Green para el espacio completo una funci on u arm onica en D (u = 0 en D)
tal que la suma satisfaga la condici on de contorno G(r, r
) = 0 si r D. Por supuesto,
u no tiene por qu e ser arm onica fuera de D.
Consideremos, por ejemplo, el semiplano y > 0 en dos dimensiones. La funci on de
Green G(r, r
), con r = (x, y), r
= (x
, y
), e y, y
> 0 debe anularse sobre el eje x
(y = 0). Esto puede lograrse mediante el m etodo de las im agenes, colocando, adem as de
la fuente puntual en (x
, y
) con carga 1, otra (virtual) en r
= (x
, y
) con carga -1.
As,
G(r, r
) =
1
2
[ln d
+
ln d
] =
1
2
ln
d
+
d
, (V.6.74)
d
2
= (x x
)
2
+ (y y
)
2
. (V.6.75)
0
r'
r
r''
x' x
y'
y
y'
Figura 49: M etodo de las im agenes para el semiplano.
Si y = 0, d
+
= d
y G(r, r
) = 0. Notar que, ahora, G(r, r
) ya no es s olo funci on de
[rr
[ = d
+
, dado que la regi on no es invariante ante traslaciones sobre el eje y.
La derivada normal en y
= 0 es
G(r, r
)
y
=0
=
1
y
d
2
, d
2
= (x x
)
2
+ y
2
,
con d la distancia de r al punto r
= (x
, 0) sobre el eje x. La soluci on de la ecuaci on
u = 0 para y > 0, con u(x, 0) = f(x) es, pues,
u(x, y) =
_
G(r, r
)
y
=0
f(x
)dx
=
y
f(x
)dx
(x x
)
2
+ y
2
, (V.6.76)
que coincide con el resultado (V.6.14) obtenido por separaci on de variables.
La ventaja de este m etodo es que puede aplicarse directamente en tres o m as dimen-
siones. Para la regi on z > 0 en tres dimensiones, obtenemos, de la misma manera,
G(r, r
) =
1
4
[
1
d
+
1
d
], (V.6.77)
d
2
= (x x
)
2
+ (y y
)
2
+ (z z
)
2
,
274
V.6 ECUACI
ON DE LAPLACE
la cual se anula en z
= 0, y
G(r, r
)
z
=0
=
1
2
z
d
3
, d
2
= (x x
)
2
+ (y y
)
2
+ z
2
,
donde d es la distancia de r = (x, y, z) a r
= (x
, y
, 0). La soluci on de la ecuaci on
u = 0 para z > 0, con u(x, y, 0) = f(x, y) es
u(x, y, z) =
z
2
_
f(x
, y
)dx
dy
[(x x
)
2
+ (y y
)
2
+z
2
]
3/2
.
En n dimensiones, procediendo en forma an aloga, se obtiene
G
x
n
[
x
n
=0
=
2
n
x
n
d
n
, con d la
distancia de r al punto r
sobre el eje x
n
= 0.
El resultado (V.6.77) puede tambi en obtenerse mediante el desarrollo (V.6.63) en las
autofunciones
u
k
(x, y, z) =
e
ik
x
x
2
e
ik
y
y
2
_
2
sin(k
z
z) ,
lo que da lugar a la representaci on integral
G(r, r
) =
1
2
3
_
dk
x
_
dk
y
_
0
dk
z
e
i(k
x
(xx
)+k
y
(yy
))
sin(k
z
z) sin(k
z
z
)
k
2
x
+ k
2
y
+ k
2
z
.
V.6.7.4. Funci on de Green para la bola y el disco
La forma m as r apida de obtener la funci on de Green en el crculo o en la bola r < a
es, nuevamente, utilizando el m etodo de las im agenes. Consideremos, primero, el caso
de la bola. Colocando una carga +1 en r
, con [r
[ = r
< a, y una carga virtual
a
r
en
r
=
a
2
r
2
r
, con [r
[ = r
=
a
2
r
> a, obtenemos
G(r, r
) =
1
4
[
1
d
a
r
1
d
] , (V.6.78)
donde d, d
son las distancias de r a r
y r
:
d
2
= r
2
+ r
2
2rr
cos
0
, d
2
= r
2
+ r
2
2rr
cos
0
,
con r = [r[ y
0
el angulo entre r y r
.
De esta forma, si r est a en el borde de la bola (ver Figura 50) r = a. Adem as, los
tri angulos (0, r
, r) y (0, r, r
) son semejantes (pues tienen un angulo en com un y r
/a =
a/r
), por lo que d/d
= r
/a y G(r, r
) = 0. Si r
0, d r y d
, con r
a
2
se tiene
G(r, 0) =
1
4
(
1
r
1
a
) . (V.6.79)
275
V.6 ECUACI
ON DE LAPLACE
0
r
r'
r''
x
y
Figura 50: M etodo de las im agenes para la bola o disco.
An alogamente, en el caso del crculo,
G(r, r
) =
1
2
[ln d ln
d
a
] =
1
2
ln
da
d
. (V.6.80)
Si r
0,
G(r, 0) =
1
2
ln(r/a) . (V.6.81)
En ambos casos, G(r, r
) es de la forma f(d) f(d
/a).
Evaluemos ahora la derivada normal en r
= a (en cuyo caso d = d
, y r
= r
= a).
Obtenemos
G(r, r
)
r
=a
= f
(d)[
d
r
a
d
d
a
]
= f
(d)
2a
2
d
2
2ar cos
da
= f
(d)
a
2
r
2
da
, (V.6.82)
donde
d
r
[
r
=a
=
d
[
r
=a
= (a r cos
0
)/d.
En el caso de la bola, f
(d) = 1/(4d
2
) y la soluci on al problema u = 0 para
r < a, con u(a, ) = f() es, reemplazando dS = a
2
d
,
u(r, ) =
_
S
G
r
f(
)dS =
a(a
2
r
2
)
4
_
S
f(
)d
d
3
(a, r,
0
)
,
con
0
dado por (V.6.31). Volvemos a encontrar, as, la soluci on (V.6.36) obtenida por
separaci on de variables.
Para el crculo, f
(d) = 1/(2d) y la soluci on al problema u = 0 para r < a, con
u(a, ) = f() es, reemplazando dS = ad
,
u(r, ) =
_
S
G
r
f(
)dS =
a
2
r
2
2
_
2
0
f(
)d
d
2
(a, r,
0
)
,
con
0
=
, que coincide con (V.6.21). El caso n dimensional se trata en forma
similar.
276
V.6 ECUACI
ON DE LAPLACE
En el caso bidimensional, la funci on de Green para una regi on D arbitraria puede
hallarse mediante una transformaci on conforme w = f(z) que mapee Den el interior del
crculo unidad. M as a un, si se mapea z
en el origen, utilizando (V.6.81) vemos que la
funci on de Green ser a, directamente,
G(z, z
) =
1
2
ln [w[ .
Por ejemplo, (V.6.80) puede obtenerse de (V.6.81) mediante la transformaci on conforme
w = a
z z
zz
a
2
, [z
[ < a ,
que mapea z
a 0 y el crculo [z[ < a en el crculo [w[ < 1 (si z = ae
i
, [w[ = [
ae
i
z
e
i
a
[ =
1). En efecto,
[w[ =
a[z z
[
[z
[[z a
2
/z
[
=
ad
r
,
con d = [z z
[, d
= [z a
2
/z
[, r
= [z
[.
V.6.7.5. Funci on de Green para el problema de Neumann
Consideremos ahora el problema
u = f(r),
u
n
= g(r) si r D. (V.6.83)
Fsicamente, es la ecuaci on que determina la temperatura estacionaria en una regi on R
cuando existe un ujo determinado de calor a trav es de la supercie D, y fuentes inter-
nas de calor representadas por f(r). Obviamente, para que exista soluci on estacionaria,
es necesario que el ujo total de calor a trav es de D sea igual (y opuesto) al proporcio-
nado por f en todo el volumen. Como ya hemos visto al denir este problema de borde,
matem aticamente, esto es consecuencia de la aplicaci on de la identidad de Green (ver
[19]),
_
D
g(r)dS =
_
D
u
n
dS =
_
D
udV =
_
D
f(r)dV . (V.6.84)
Esta es una condici on necesaria para la existencia de soluci on. Por otro lado, es claro que
la soluci on, si existe, no es unica, pues puede sumarse una constante arbitraria: Si u(r) es
soluci on u(r) + c es tambi en soluci on. La constante c es, de hecho, una autofunci on
de para el problema de Neumann homog eneo, con autovalor 0:
u
k
(r) =
k
u
k
(r),
u
k
n
= 0 si r D. (V.6.85)
El autovalor m as bajo es
0
= 0 y corresponde a la autofunci on normalizada u
0
(r) =
1/
V , donde V =
_
D
dV es el volumen de D. Por ortogonalidad con u
0
, el resto de las
autofunciones tendr a valor medio nulo:
1
V
_
D
u
k
(r)dV = 0, k ,= 0 .
277
V.6 ECUACI
ON DE LAPLACE
Consideremos, primero, el caso g(r) = 0 (o sea,
u
n
= 0 en D), que correspon-
de a un borde t ermicamente aislante. La condici on necesaria de existencia de soluci on
estacionaria es que el calor total suministrado en el interior sea 0:
_
D
f(r)dV = 0 . (V.6.86)
En este caso, podemos escribir u(r) =
k
k
c
k
u
k
(r), f(r) =
k
f
k
u
k
(r), con u
k
(r) las
autofunciones determinadas por (V.6.85) y
c
k
=
_
D
u(r)u
k
(r)dV, f
k
=
_
D
f(r)u
k
(r)dV .
La condici on (V.6.86) implica
f
0
=
_
D
f(r)u
0
(r)dV =
1
V
_
D
f(r)dV = 0 .
Multiplicando la ecuaci on (V.6.83) por u
k
(r) y utilizando (V.6.60), obtenemos
k
c
k
= f
k
.
Como
0
= f
0
= 0 y
k
,= 0 si k ,= 0, tenemos
c
k
= f
k
/
k
, k > 0, c
0
arbitrario .
La soluci on puede, por lo tanto, escribirse como
u =
_
D
N(r, r
)f(r
)dV + c ,
donde
N(r, r
) =
k>0
u
k
(r)u
k
(r
k
es la funci on de Neumann, y c una constante arbitraria, igual al valor medio
1
V
_
D
u(r)dV .
N est a denida por la ecuaci on
N(r, r
) = (r r
)
1
V
,
N(r, r
)
n
= 0, r D,
donde hemos sustrado a la fuente puntual su valor medio:
1
V
_
D
(r r
)dV =
1
V
,
de forma que
_
D
[(r r
)
1
V
]dV = 0. Notemos que
(r r
)
1
V
= (r r
) u
0
(r)u
0
(r
) =
k>0
u
k
(r)u
k
(r
) .
278
V.6 ECUACI
ON DE LAPLACE
Resolvamos ahora el problema general (V.6.83). Utilizando (V.6.60) obtenemos
k
c
k
= f
k
+ g
k
, g
k
=
_
D
u
k
(r)g(r)dS ,
donde la condici on (V.6.84) implica
f
0
+g
0
= 0 .
Por lo tanto,
c
k
=
f
k
+g
k
k
, k > 0, c
0
arbitrario .
Obtenemos, nalmente,
u(r, r
) =
_
D
N(r, r
)f(r
)dV +
_
D
N(r, r
)g(r
)dS + c ,
donde c =
1
V
_
D
u(r)dV es una constante arbitraria.
Como ejemplo directo, en el caso de un rect angulo, 0 x a, 0 y b,
N(r, r
) =
2
ab
n,m
nm
cos(k
n
x) cos(k
n
x
) cos(l
m
y) cos(l
m
y
)
k
2
n
+ l
2
m
,
donde k
n
= n/a, l
m
= m/b, con n, m = 0, 1, 2, . . ., y
nm
= 2
n0
m0
(o sea,
00
= 0,
0m
=
n0
= 1,
nm
= 2 si n > 0, m > 0).
V.6.7.6. Soluci on para el problema general de Dirichlet
La soluci on del problema general de Dirichlet
L
r
(u) = f(r), r D, u(r) = g(r), r D
L
r
(u) =
r
u + q(r)u
puede expresarse en t erminos de la funci on de Green G(r, r
), denida por
L
r
(G) = (r r
), r D, G(r, r
) = 0, r D, (V.6.87)
como
u(r) =
_
D
G(r, r
)f(r
)dV
_
D
G
n
g(r
)dS
, (V.6.88)
donde n
es la direcci on normal hacia exterior. Por supuesto, aqu hemos supuesto que
la soluci on de (V.6.87) existe. La expresi on (V.6.88) se puede demostrar utilizando el
desarrollo en autofunciones de L con condiciones de contorno homog eneas. G vuelve a
estar dada entonces por la expresi on (V.6.63). Se puede llegar tambi en a (V.6.88) direc-
tamente de (V.6.87), intercambiando r por r
, multiplicando luego (V.6.87) por u(r
) e
279
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
integrando nalmente sobre Drespecto de r
, utilizando el teorema de Green y la simetra
G(r, r
) = G(r
, r):
u(r) =
_
D
(r
r)u(r
)dV
=
_
D
L
r
[G(r, r
)]u(r
)dV
=
_
D
[
G
n
u(r
) +G(r, r
)
u
n
]dS
+
_
D
G(r, r
)L
r
[u(r
)]dV
=
_
D
G
n
g(r
)dS
+
_
D
G(r, r
)f(r
)dV
donde, en la ultima lnea, se han utilizado la condici on de contorno homog enea de G y el
valor de u en el borde.
V.7. Ecuaciones hiperb olicas y parab olicas en mayores
dimensiones espaciales
V.7.1. Ecuaci on hiperb olica en m as variables. Ondas y funci on de
Green en el espacio n-dimensional
Consideremos, ahora, la ecuaci on general de ondas,
u
tt
v
2
u = f(r, t) , (V.7.1)
donde es el Laplaciano, en una regi on Dsimplemente conexa de un espacio n-dimensional,
con la condici on de contorno
u(r, t) = g(r, t), r D (V.7.2)
y la condici on inicial
u(r, 0) = (r), u
t
(r, 0) = (r) . (V.7.3)
Sean u
k
(r) las autofunciones normalizadas del Laplaciano en dicha regi on con condicio-
nes de contorno homog eneas,
u
k
=
k
u
k
, u
k
(r) = 0 si r D (V.7.4)
_
D
u
k
(r)u
k
(r)dV =
kk
. (V.7.5)
En primer lugar, mediante el m etodo de separaci on de variables podemos ver que la solu-
ci on general de la ecuaci on de ondas homog enea con la condici on de contorno u(r, t) = 0
si r D (membrana el astica ja en el borde) puede expresarse en t erminos de las auto-
funciones anteriores como
u(r, t) =
k
u
k
(r)[a
k
cos(v
k
t) + b
k
sin(v
k
t)] . (V.7.6)
280
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
Problema sugerido V.7.1: Demostrar el resultado (V.7.6) utilizando separaci on de varia-
bles, y dar una expresi on para a
k
y b
k
en t erminos de las condiciones iniciales.
Problema sugerido V.7.2: Dar la expresi on explcita de (V.7.6) para i) un rect angulo de
lados a, b, y ii) un disco de radio a.
En el caso general, podemos desarrollar u(r, t) y f(r, t) como
u(r, t) =
k
c
k
(t)u
k
(r, t) , c
k
(t) =
_
D
u
k
(r)u(r, t)dV
f(r, t) =
k
f
k
(t)u
k
(r) f
k
(t) =
_
D
u
k
(r)f(r, t)dV
y efectuar una integraci on por partes tal que
_
D
u
k
udV =
_
D
u
u
k
n
dS
_
D
uu
k
dV
= g
k
(t)/v
2
+
k
c
k
(t) ,
donde
g
k
(t) = v
2
_
D
g(r, t)
u
k
(r)
n
dS.
Multiplicando la ecuaci on (V.7.1) por u
k
(r) e integrando obtenemos, entonces, la ecua-
ci on diferencial ordinaria
d
2
c
k
dt
2
+ v
2
k
c
k
= f
k
(t) g
k
(t).
Empleando la expresi on de la funci on de Green para ecuaciones diferenciales ordinarias
(ver II), se encuentra
c
k
(t) = c
k
(0) cos(
k
t) + c
k
(0)
sin(
k
t)
k
+
_
t
0
sin[
k
(t t
)]
k
(f
k
(t
) g
k
(t
))dt
,
con
k
= v
k
las frecuencias propias del sistema y
c
k
(0) =
_
D
u
k
(r)(r)dV, c
k
(0) =
_
D
u
k
(r)(r)dV.
Obtenemos, as,
u(r, t) =
_
D
_
0
G(r, r
, t t
)f(r
, t
)dV
dt
+
_
D
[G(r, r
, t)(r
) + G
t
(r, r
, t)(r
)]dV
v
2
_
D
_
0
G(r, r
, t t
)
n
g(r
, t
)dS
dt
, (V.7.7)
281
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
con
G(r, r
, t) =
k
sin(
k
t)
k
u
k
(r)u
k
(r
)H(t) (V.7.8)
la funci on de Green causal de la ecuaci on de ondas, que satisface
(
2
t
2
v
2
)G(r, r
, t) = (r r
)(t)
y la condici on de contorno que caracteriza a nuestro problema.
G(r, r
, t) es la amplitud en (r, t) para un impulso puntual en (r
, 0) que se anula para
t < 0.
Por ejemplo, para una cuerda nita de longitud a con extremos jos,
G(x, x
, t) =
2
a
n=1
sin(
n
t)
n
sin(nx/a) sin(nx
/a)H(t) , (V.7.9)
con
n
= v(n/a).
Para una membrana circular de radio a con borde jo,
G(r, r
, ,
, t) =
1
a
2
n,m
sin(
nm
t)
nm
J
n
(k
nm
r/a)J
n
(k
nm
r
/a)e
in(
)
(J
n
(k
nm
))
2
, (V.7.10)
donde
nm
= vk
nm
/a son las frecuencias propias y k
nm
denota el em esimo cero de J
n
(J
n
(k
nm
) = 0), con m = 1, 2, . . ., n = 0, 1, . . .. La frecuencia fundamental (la m as baja)
es
01
vk
01
/a, con k
01
0,765. Notemos que
01
v1,357/
A,
donde A = a
2
es el area de la membrana. Esta es la frecuencia m as baja que puede
obtenerse para un area dada con extremos jos.
Problema sugerido V.7.3: Mostrar que, para una membrana cuadrada, la frecuencia fun-
damental es v
2/
A.
Para una cuerda innita, las autofunciones normalizadas son
u
k
(x) =
e
ikx
2
_
k
(x)u
k
(x)dx = (k k
)
y, por lo tanto,
G(x, x
, t) =
H(t)
2
_
sin(kvt)
kv
e
ik(xx
)
dk
=
H(t)
2v
[H(xx
+vt) H(xx
vt)] =
H(vt [xx
[)
2v
,
282
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
n1
n2
n3
v
1
v t 0 v t
x
G
Figura 51: Esquema de la funci on de Green de la ecuaci on de ondas en una, dos y tres
dimensiones.
donde la ultima expresi on es v alida para t > 0. Hemos tomado valor principal y recordado
que la transformada de Fourier de H(x+a) H(xa) =
Sg[a] |x|<|a|
0 |x|>|a|
es
1
2
_
[H(x + a) H(x a)]e
ikx
dk =
1
2
_
a
a
e
ikx
dx
=
e
ika
e
ika
2ik
=
sin(ka)
k
.
En el espacio tridimensional,
G(r, r
, t) =
H(t)
(2)
3
_
R
3
sin(vkt)
vk
e
ik(rr
)
d
3
k ,
donde k = [k[. Pasando a coordenadas polares y deniendo r = [r r
[, se obtiene
G(r, r
, t) =
H(t)
(2)
2
_
0
sin(vkt)
vk
k
2
dk
_
0
e
ikr cos
sin d
=
2H(t)
(2)
2
vr
_
0
sin(kvt) sin(kr)dk =
H(t)
8
2
vr
_
[e
ik(rvt)
e
ik(r+vt)
]dk
=
H(t)
4vr
[(r vt) (r + vt)] =
(vt r)
4vr
,
donde la ultima expresi on es v alida para t > 0 y representa una supercie esf erica
alej andose de la fuente con velocidad v y amplitud proporcional a r
1
. Notemos la gran
diferencia con el caso unidimensional. Esta forma de la funci on de Green permite la trans-
misi on limpia de pulsos en 3 dimensiones.
Problema sugerido V.7.3: Probar que, en el caso tridimensional, una soluci on de la ecua-
ci on de ondas que depende s olo de r = [r[, debe ser de la forma
u(r, t) = f(r vt)/r + g(r + vt)/r . (V.7.11)
283
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
En el caso bidimensional, se obtiene
G(r, r
, t) =
H(t)
(2)
2
_
R
2
sin(vkt)
vk
e
ik(rr
)
d
2
k
=
H(t)
(2)
2
_
0
sin(vkt)
vk
kdk
_
2
0
e
ikr cos
d =
H(t)
2v
_
0
sin(kvt)J
0
(kr)dk
=
H(t)
2v
H((vt)
2
r
2
)
_
(vt)
2
r
2
,
resultado que puede interpretarse como intermedio entre los correspondientes a 1 y 3
dimensiones espaciales.
V.7.2. Difusi on en el espacio n-dimensional. Funci on de Green de la
ecuaci on general de difusi on
Consideremos la ecuaci on de difusi on en n dimensiones espaciales,
u
t
u = f(r, t), > 0 (V.7.12)
en una regi on simplemente conexa D, con la condici on de contorno
u(r, t) = g(r, t), r D (V.7.13)
y la condici on inicial
u(r, 0) = (r), r D. (V.7.14)
En primer lugar, mediante el m etodo de separaci on de variables, podemos ver que la
soluci on general de la ecuaci on de difusi on homog enea con la condici on de contorno
u(r, t) = 0 si r D (por ejemplo, temperatura nula en el borde) puede expresarse en
t erminos de las autofunciones y autovalores (V.7.4) como
u(r, t) =
k
c
k
u
k
(r)e
2
k
t
. (V.7.15)
Problema sugerido V.7.4: Demostrar el resultado (V.7.15) utilizando separaci on de va-
riables, y dar una expresi on para c
k
en t erminos de la condici on inicial.
Problema sugerido V.7.5: Dar la expresi on explcita de (V.7.15) para i) un rect angulo de
lados a, b, y ii) un disco de radio a.
Consideremos, ahora, el caso de la ecuaci on inhomog enea. Mediante el desarrollo
u(r, t) =
k
c
k
(t)u
k
(r), f(r, t) =
k
f
k
(t)u
k
(r), (V.7.16)
284
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
donde u
k
(r) son las autofunciones del Laplaciano con condiciones de contorno homog eneas,
u
k
=
k
u
k
, u
k
(r) = 0, si r D
y
c
k
(t) =
_
D
u
k
(r)u(r, t)dV, f
k
(t) =
_
D
u
k
(r)f(r, t)dV , (V.7.17)
se obtiene una ecuaci on diferencial ordinaria para c
k
(t):
dc
k
dt
+
k
c
k
= f
k
(t) g
k
(t) ,
donde g
k
(t) =
_
D
g(r, t)
u
k
(r)
n
dS. La soluci on es
c
k
(t) = c
k
(0)e
k
t
+
_
t
0
e
k
(tt
)
(f
k
(t
) g
k
(t
))dt
,
con
c
k
(0) =
_
D
u
k
(r)(r)dV.
Obtenemos, nalmente,
u(r, t) =
_
D
_
0
G(r, r
, t t
)f(r
, t
)dV
dt
+
_
D
G(r, r
, t)(r
)dV
_
D
_
0
G(r, r
, t t
)
n
g(r
, t
)dS
dt
,
(V.7.18)
donde
G(r, r
, t t
) =
k
e
k
(tt
)
u
k
(r)u
k
(r
)H(t t
)
(V.7.19)
= K(r, r
, t t
)H(t t
) (V.7.20)
es la funci on de Green de la ecuaci on de difusi on, que satisface
(
t
)G(r, r
, t t
) = (r r
)(t t
)
y la condici on de contorno que caracteriza a nuestro problema. G(r, r
, t t
) es la tem-
peratura en (r, t) para una fuente de calor puntual en (r
, t
), siendo nula para t < t
.
En cambio, K(r, r
, t) =
k
e
k
t
u
k
(r)u
k
(r
) satisface la ecuaci on de difusi on ho-
mog enea, K
t
K = 0, con condici on inicial lm
t0
+ K(r, r
, t) = (r r
).
285
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
Por ejemplo, para una barra nita de longitud a,
G(r, r
, t) =
2
a
n=1
e
n
2
2
t/a
2
sin(nx/a) sin(nx
/a)H(t) (V.7.21)
mientras que, para una barra innita,
G(r, r
, t) =
H(t)
2
_
e
k
2
t
e
ik(xx
)
dk =
e
(xx
)
2
/4t
2
t
H(t) (V.7.22)
y, para el espacio tridimensional,
G(r, r
, t) =
H(t)
(2)
3
_
R
3
e
|k|
2
t
e
ik(rr
)
d
3
k =
e
|rr
|
2
/4t
(2
t)
3
H(t), (V.7.23)
ya que la integral se descompone en el producto de 3 integrales similares a la del caso de
una dimensi on.
El caso n-dimensional es similar. La funci on de Green de la ecuaci on de difusi on con-
serva, en consecuencia, la misma forma gaussiana en 1, 2, 3 o n dimensiones, a diferencia
de la funci on de Green de la ecuaci on de ondas.
Problema sugerido V.7.6: Determinar la funci on de Green de la ecuaci on de difusi on
para un disco y para una esfera s olida (bola), ambos de radio a, para la condici on de con-
torno de Dirichlet.
Problema sugerido V.7.7: Dar la forma general de la funci on de Green de la ecuaci on
de difusi on para condiciones de contorno de Neumann.
Para nalizar, mencionamos que la soluci on del problema general
u
t
+ L
r
(u) = f(r, t), > 0 (V.7.24)
en una regi on simplemente conexa D con
L
r
(u) =
r
u + q(r) (V.7.25)
y la condici on de contorno
u(r, t) = g(r, t), r D (V.7.26)
y la condici on inicial
u(r, 0) = (r) (V.7.27)
est a dada nuevamente por la expresi on (V.7.18), con G dada nuevamente por la expresi on
(V.7.19)(V.7.20), con L
r
(u
k
) =
k
u
k
y u
k
(r) = 0 en D. G satisface
(
t
+ L
r
)G(r, r
, t t
) = (r r
)(t t
) (V.7.28)
286
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
con G(r, r
, t t
) = 0 para r D y G = 0 para t < t
. La expresi on (V.7.18) para la
soluci on general puede obtenerse mediante el desarrollo en autofunciones, o tambi en de la
ecuaci on (V.7.28), intercambiando r por r
, multiplicando luego por u(r
, t
) e integrando
respecto de r
y t
en D y (0, ) respectivamente, aplicando el teorema de Green en r
y
la integraci on por partes en t
.
Problema sugerido V.7.8: Encontrar la expresi on (V.7.18) siguiendo el procedimiento
que se acaba de proponer (partir de u(r, t) =
_
dt
_
D
dV
u(r
, t
)(r
r, t
t)).
Problema sugerido V.7.9: Utilizar un procedimiento an alogo al del problema V.7.8 para
derivar la funci on de Green (V.7.8) de la ecuaci on de ondas.
287
V.7 ECUACIONES HIPERB
OLICAS Y PARAB
OLICAS EN MAYORES
DIMENSIONES ESPACIALES
288
Captulo VI
A modo de eplogo: Ecuaciones de la
Fsica Matem atica
a partir de un Principio Variacional
289
VI.1 PRINCIPIO DE HAMILTON PARA SISTEMAS CON UN N
UMERO
FINITO DE GRADOS DE LIBERTAD: ECUACIONES DIFERENCIALES
ORDINARIAS
En este libro hemos intentado dar una introducci on a la teora de las ecuaciones dife-
renciales, haciendo hincapi e en aquellos aspectos que consideramos de especial inter es,
en una primera aproximaci on al estudio de los fen omenos fsicos. Este objetivo nos ha
conducido, inevitablemente, a presentar una diversidad de deniciones, teoremas, ecua-
ciones, funciones, ejemplos, etc. Al observar, retrospectivamente, este panorama vario-
pinto, es de esperar que pueda el/la lector/a reconocer ciertos hilos conductores, que le
otorguen una mirada articulada y compacta del tema. Para abonar esta idea, de sntesis
y unidad, que debe, a nuestro juicio, seguir al necesario an alisis de las particularidades,
hemos decidido concluir este libro presentando brevemente un tema que expresa de modo
singular la indisoluble unidad entre la Fsica y la Matem atica.
Los llamados principios variacionales tienen una gran importancia en Fsica. Ya he-
mos considerado previamente la existencia de un problema variacional asociado con el
problema de Sturm-Liouville en III.1.5. Ahora nuestro objetivo es mostrar que todas las
ecuaciones diferenciales de relevancia en el contexto de problemas fsicos pueden obte-
nerse a partir de un principio variacional. Los primeros ejemplos de gran trascendencia,
en cuanto a sus aplicaciones, han sido el llamado Principio de Hamilton y la formulaci on
lagrangiana de la Mec anica Cl asica [16], que permiten obtener las ecuaciones de movi-
miento de Newton pero de un modo m as general y exible. Este enfoque hace posible
estudiar con naturalidad sistemas mec anicos sujetos a vnculos, cuyo tratamiento resulta
engorroso (cuando no imposible) en el esquema original de Newton. Pero su inuencia va
mucho m as all a, sirviendo de marco unicado para todos los desarrollos modernos de la
Fsica, que a partir de la teoras de la relatividad y la mec anica cu antica, han dominado el
escenario desde principios del siglo XX y hasta nuestros das. Tal vez la principal raz on
de este protagonismo resulte ser el rol central que ocupan los principios de simetra en la
Fsica contempor anea y el hecho de que las invariancias asociadas y sus correspondientes
leyes de conservaci on, se maniestan del modo m as natural y elegante a trav es de los
principios variacionales.
Resulta conveniente empezar a describir el uso de los principios variacionales consi-
derando el caso de un sistema con un n umero nito de grados de libertad. Luego exten-
deremos la formulaci on para el caso en que el n umero de grados de libertad es innito
(sistemas continuos).
VI.1. Principio de Hamilton para sistemas con un n ume-
ro nito de grados de libertad: ecuaciones diferen-
ciales ordinarias
Consideremos una partcula de masa m y posici on dada por el vector r. La energa
cin etica est a dada por
T =
1
2
m ( x
2
+ y
2
+ z
2
),
291
VI.1 PRINCIPIO DE HAMILTON PARA SISTEMAS CON UN N
UMERO
FINITO DE GRADOS DE LIBERTAD: ECUACIONES DIFERENCIALES
ORDINARIAS
donde x, y, z son las componentes de r en un sistema de coordenadas cartesianas y x, co-
mo es tradicional en el contexto de la mec anica analtica, denota derivaci on con respecto
al tiempo: x =
d
dt
x. Supongamos que la partcula est a sometida a una fuerza conservativa
F. Existe entonces una funci on escalar U(r) = U(x, y, z), llamada energa potencial, tal
que F = U.
En este punto resulta conveniente realizar un cambio en la notaci on: r x. Esto
indica que la forma en que escribimos a las componentes del vector posici on cambian del
siguiente modo: x x
1
, y x
2
, z x
3
. Con esta notaci on la componente i- esima de la
fuerza se relaciona con U(x
1
, x
2
, x
3
) en la forma F
i
=
U
x
i
, y la componente i- esima de
la cantidad de movimiento puede expresarse como m x
i
=
T
x
i
. Tenemos, entonces, una
nueva manera de escribir las ecuaciones que surgen de la segunda ley de Newton:
d
dt
T
x
i
=
U
x
i
,
con i = 1, 2, 3. El lector puede preguntarse con qu e prop osito reescribimos las fami-
liares ecuaciones newtonianas del movimiento de un modo aparentemente tan articial.
Veremos en breve que, como sucede a menudo en Fsica, la expresi on de una ecuaci on ya
conocida en t erminos de nuevas magnitudes, puede conducir a nuevos desarrollos concep-
tuales, con consecuencias de largo aliento. En este caso, la nueva forma de las ecuaciones
de movimiento implica colocar en el primer plano a cantidades que representan formas
de la energa, T y U, a expensas del concepto de fuerza. Dado que T depende s olo de
las componentes de la velocidad y U es funci on de las coordenadas y no de la veloci-
dad, es posible escribir las ecuaciones de movimiento en t erminos de una unica funci on
L(x
1
, x
2
, x
3
, x
1
, x
2
, x
3
) = T( x
1
, x
2
, x
3
)U(x
1
, x
2
, x
3
), denominada lagrangiano del sis-
tema bajo estudio (en este caso una partcula),
d
dt
L
x
i
L
x
i
= 0, (VI.1.1)
con i = 1, 2, 3. Esta es la forma lagrangiana de las ecuaciones de movimiento. Aunque
la encontramos para el caso de una partcula, se generaliza f acilmente para el caso de
un sistema de partculas. Pero lo m as interesante de la forma de estas ecuaciones es que
sugiere la posibilidad de ser derivadas a partir de un principio variacional. Para mostrar
esto, del modo m as general posible, consideremos un sistema fsico cualquiera cuya po-
sici on est a determinada de manera unvoca por n cantidades independientes q
1
, q
2
, ...q
n
que se denominan las coordenadas generalizadas del sistema, que no necesariamente son
cartesianas. Este n umero n se denomina n umero de grados de libertad del sistema. Las
velocidades generalizadas est an dadas por q
1
, ..., q
n
. La experiencia ha demostrado que el
estado mec anico de un sistema queda completamente determinado cuando se tienen da-
das, para un dado instante, sus coordenadas y velocidades. Por lo tanto, es natural caracte-
rizar a un sistema mec anico mediante una funci on lagrangiana L(q
1
, . . . , q
n
, q
1
, . . . , q
n
, t).
N otese que en este caso general consideramos la posibilidad de que L dependa explci-
tamente del tiempo. Supongamos que el sistema ocupa posiciones dadas en dos instantes
de tiempo t
0
y t
1
, y estas posiciones est an determinadas por los conjuntos de valores de
292
VI.1 PRINCIPIO DE HAMILTON PARA SISTEMAS CON UN N
UMERO
FINITO DE GRADOS DE LIBERTAD: ECUACIONES DIFERENCIALES
ORDINARIAS
q(t)
q(t)q(t)
t
0
t
1
t
q
0
q
1
q(t)
Figura 52: Esquema de q(t) (curva que minimiza la acci on S entre t
0
y t
1
para q(t
0
) = q
0
,
q(t
1
) = q
1
) y de q(t) + q(t) para dos variaciones distintas q(t).
las coordenadas generalizadas: q
(0)
(q
1
(t
0
) = q
0
1
, q
2
(t
0
) = q
0
2
, . . . , q
n
(t
0
) = q
0
n
) y
q
(1)
(q
1
(t
1
) = q
1
1
, q
2
(t
1
) = q
1
2
, . . . , q
n
(t
1
) = q
1
n
). Denimos ahora una nueva cantidad
llamada la acci on del sistema:
S =
_
t
1
t
0
L(q
1
, . . . , q
n
, q
1
, . . . , q
n
, t) dt. (VI.1.2)
El principio de mnima acci on (o principio de Hamilton) establece que el sistema se mue-
ve entre q
(0)
y q
(1)
de manera tal que la acci on S tome un valor extremo (usualmente es
un mnimo, lo que justica el nombre del principio, pero puede tambi en ser un m aximo).
Notemos que, al estudiar la evoluci on de un sistema, en lugar de partir de las ecuaciones
del movimiento, estamos partiendo del principio de Hamilton, las ecuaciones que rigen el
movimiento son una inc ognita que debemos obtener como consecuencia del mencionado
principio. Para mostrar c omo encontrar estas ecuaciones consideremos, por simplicidad,
un sistema con un solo grado de libertad, es decir que su lagrangiana es L(q, q, t). La ac-
ci on es una funcional que depende de la funci on q(t). Para encontrar q(t) (a trav es de sus
ecuaciones de movimiento) debemos imponer las condiciones para las cuales la acci on
toma un valor extremo, con las condiciones inicial y nal: q(t
0
) = q
(0)
y q(t
1
) = q
(1)
.
Matem aticamente este problema corresponde al llamado c alculo variacional. Si bien una
discusi on rigurosa de los m etodos variacionales no est a dentro de los objetivos de este
libro, presentaremos a continuaci on un modo intuitivo de resolver el problema, que sigue
la lnea del c elebre texto de Landau y Lifshitz [16] (el lector interesado puede consultar
[5]).
Supongamos que q(t) es la funci on para la cual S alcanza su valor extremo, y, para
ser m as denidos supongamos tambi en que este valor es un mnimo. Si, en lugar de q(t),
se considera cualquier otra funci on q(t) +q(t), siendo q(t) una funci on que permanece
peque na en el intervalo (t
0
, t
1
), se cumplir a que
_
t
1
t
0
L(q +q(t), q + q, t) dt
_
t
1
t
0
L(q, q, t) dt 0. (VI.1.3)
293
VI.1 PRINCIPIO DE HAMILTON PARA SISTEMAS CON UN N
UMERO
FINITO DE GRADOS DE LIBERTAD: ECUACIONES DIFERENCIALES
ORDINARIAS
La funci on q(t) se llama variaci on de la funci on q(t). Notemos que q(t
0
) = q(t
1
) = 0,
para que se cumplan las condiciones inicial y nal del movimiento. Observemos tambi en
que el tiempo t aparece inalterado en esta expresi on, lo que, en t ermino de variaciones
corresponde a la condici on t = 0. Esto signica que en todas las trayectorias consi-
deradas (la real y las variadas) el sistema va evolucionando al mismo ritmo, partiendo
todas en el mismo instante de q
(0)
y llegando todas en el mismo instante a q
(1)
. Por otro
lado, el miembro izquierdo de (VI.1.3) es lo que cambia la acci on al variar q(t). Esta can-
tidad se llama variaci on de la acci on. Un modo concreto de implementar esta variaci on es
desarrollando L(q +q(t), q + q, t) en serie de potencias de las variaciones q y q. Si en
este desarrollo conservamos s olo los t erminos de primer orden, encontramos la primera
variaci on de S, que indicaremos como S (la segunda variaci on se obtiene al conservar
los t erminos de segundo orden),
S =
_
t
1
t
0
_
L
q
q +
L
q
q
_
dt. (VI.1.4)
As como en el an alisis matem atico de funciones usuales, de una variable, los extremos
de la funci on se encuentran mediante la anulaci on de la derivada primera, en el caso de
funcionales existe un teorema que asegura que si S adquiere un valor extremo para q(t),
entonces se cumple (condici on necesaria) que S = 0. Igualando a cero la expresi on
(VI.1.4) para S e integrando por partes el segundo t ermino (luego de utilizar la propiedad
q =
dq
dt
) se obtiene
S =
_
t
1
t
0
_
L
q
d
dt
L
q
_
q dt +
_
L
q
q
_
t
1
t
0
= 0,
donde enseguida advertimos que el t ermino de la derecha, que proviene de la integraci on
por partes, se anula, ya que q = 0 tanto en t
0
como en t
1
. En los casos de inter es
fsico las funciones q(t) y q(t) son continuas, por lo tanto se cumplen las condiciones de
validez del lema fundamental del c alculo variacional [5]: siendo f(t) y q(t) continuas
en el intervalo [t
0
, t
1
], si
_
t
1
t
0
f(t) q(t) dt = 0 q(t), entonces f(t) = 0. De este modo,
partiendo del principio de mnima acci on obtenemos la ecuaci on de Euler-Lagrange:
d
dt
L
q
L
q
= 0, (VI.1.5)
para un grado de libertad q. La extensi on al caso general de n grados de libertad es directa.
Dado que, por denici on, las n coordenadas q
i
son independientes, tambi en lo son sus
variaciones q
i
y el procedimiento anterior permite obtener
d
dt
L
q
i
L
q
i
= 0, i = 1, . . . , n, (VI.1.6)
que constituyen un sistema de n ecuaciones diferenciales ordinarias de segundo orden
que tiene como inc ognitas a las n funciones q
i
(t). Como sabemos, la soluci on general
de este sistema contiene 2n constantes arbitrarias que se determinan especicando las
condiciones iniciales, por ejemplo dando q
i
(t) y q
i
(t) (i = 1, . . . , n) para un dado instante
t
0
.
294
VI.2 PRINCIPIO VARIACIONAL PARA SISTEMAS CONTINUOS:
ECUACIONES DIFERENCIALES A DERIVADAS PARCIALES
VI.2. Principio variacional para sistemas continuos: ecua-
ciones diferenciales a derivadas parciales
Vibraciones longitudinales de una barra
Consideremos una barra s olida muy larga, formada por N partculas, todas igualmente
espaciadas por una distancia a, y cada una de ellas con una misma masa m. Supongamos
que cada una de estas partculas vibra longitudinalmente, y se conecta con sus vecinas
mediante resortes de constante k. Este sistema se suele llamar una cadena arm onica lineal.
Llamaremos u
i
al desplazamiento de la i- esima partcula con respecto a su posici on de
equilibrio. Las energas cin etica y potencial el astica de este sistema est an dadas por
T =
1
2
i
m u
i
2
y
U =
1
2
i
k (u
i
u
i1
)
2
.
La fuerza que act ua sobre la j- esima partcula es
F
j
=
U
u
j
= k(u
j
u
j1
) + k(u
j+1
u
j
).
De acuerdo a lo visto en la subsecci on anterior, la funci on lagrangiana del sistema
puede escribirse en la forma
L =
1
2
i
a
_
m
a
u
i
2
ka(
u
i
u
i1
a
)
2
_
=
i
aL
i
,
donde queda denida la cantidad L
i
. Realicemos ahora el pasaje al lmite continuo, que
consiste en considerar m 0 y a 0, pero de modo tal que el cociente
m
a
se mantiene
nito. De hecho, este cociente es la densidad lineal de masa =
m
a
. Por otro lado, la ley
de Hooke establece que el alargamiento es proporcional a la tensi on, lo cual conduce a
F
i
= Y
u
i+1
u
i
a
, donde la constante Y = ka es el m odulo de Young del material. Cuando
pasamos de la descripci on discreta del sistema, al continuo, el ndice i, que identica a
una dada masa puntual, se convierte en una coordenada x. Entonces, esquem aticamente,
se tiene: i x y u
i
u(x), donde omitimos, moment aneamente, la dependencia en t,
para mayor claridad. Adem as, en este lmite,
u
i
u
i1
a
u(x + a) u(x)
a
u
x
= u
x
,
y la suma sobre todas las partculas pasa a ser una integral:
i
a
_
dx,
295
VI.2 PRINCIPIO VARIACIONAL PARA SISTEMAS CONTINUOS:
ECUACIONES DIFERENCIALES A DERIVADAS PARCIALES
mientras que la cantidad L
i
, denida antes, pasa a ser la llamada densidad lagrangiana
L =
1
2
_
(u
t
)
2
Y (u
x
)
2
_
,
donde, por supuesto, la funci on u depende tanto de x como del tiempo t. En este contexto,
las funciones u(t, x) as obtenidas suelen llamarse campos.
Destaquemos el papel que juegan x y u(t, x) en esta formulaci on continua. Remar-
quemos que x no representa una coordenada generalizada sino una especie de ndice
continuo que reemplaza al ndice discreto i. As como cada valor de i corresponda a una
coordenada generalizada u
i
, al pasar al continuo hay una coordenada generalizada u(t, x)
para cada valor de x. Y, como x, al ser una variable continua, toma innitos valores, en-
tonces el sistema continuo puede considerarse como un sistema con innitos grados de
libertad. Esto nos gua directamente al tema central de esta secci on, el de las ecuaciones
de movimiento. Notemos que ahora la acci on puede escribirse en t erminos de la densidad
lagrangiana como
S =
_
t
1
t
0
_
x
1
x
0
L(u
t
, u
x
) dt dx. (VI.2.7)
Como antes, imponemos la condici on S = 0, con las condiciones u = 0 en los bordes
(dados por t = t
0
, t
1
y x = x
0
, x
1
), lo cual nos lleva, mediante un algebra completamente
an aloga a la de la subsecci on anterior, a la ecuaci on:
u
tt
Y u
xx
= 0,
que coincide, en su forma, con la ecuaci on de onda en una dimensi on discutida en V.4.1.
Notemos que en el ejemplo precedente la densidad lagrangiana es una funcional de u
t
y u
x
. En casos m as generales, en los que hubiesen, por ejemplo, fuerzas adicionales lo-
cales, L podra depender tambi en de u. Tambi en existen casos en que se tiene una depen-
dencia explcita de t y x. Por lo tanto, una forma m as abarcativa es L = L(u
t
, u
x
, u, t, x).
El principio de mnima acci on, con las condiciones usuales (u = 0 para t = t
0
, t
1
y
x = x
0
, x
1
, t = x = 0) da lugar a
t
L
u
t
+
x
L
u
x
L
u
= 0, (VI.2.8)
que es la ecuaci on de Lagrange para un sistema continuo en una dimensi on espacial.
Un aspecto sorprendente de estos resultados es que se obtenga precisamente una sola
ecuaci on de movimiento. En efecto, como vimos en la subsecci on anterior, un sistema con
un n umero nito n de grados de libertad, es descripto por n ecuaciones de movimiento. A
medida que n crece, tambi en crece el n umero de ecuaciones. Sin embargo, para n ,
la din amica de todo el sistema queda determinada por una sola ecuaci on. Pero esta unica
ecuaci on resulta ser a derivadas parciales, mientras que las ecuaciones que se obtienen
para n nito son ordinarias.
Es importante enfatizar que esta formulaci on continua se generaliza de un modo bas-
tante directo en dos direcciones: cuando se deben considerar mas dimensiones espaciales,
296
VI.2 PRINCIPIO VARIACIONAL PARA SISTEMAS CONTINUOS:
ECUACIONES DIFERENCIALES A DERIVADAS PARCIALES
y cuando el problema requiere la consideraci on de un n umero mayor de campos (que
pueden, eventualmente, interactuar entre s). Como ejemplo del primer caso, resulta ins-
tructivo estudiar las vibraciones transversales de una membrana el astica delgada.
Vibraciones transversales de una membrana delgada
Llamemos u(t, x, y) al desplazamiento de la membrana con respecto a su posici on de
equilibrio, dada por u = 0. La membrana se extiende a lo largo de una regi on R cuya
frontera es una curva simple C, que supondremos ja. Para obtener la ecuaci on de movi-
miento mediante el principio variacional, debemos determinar la lagrangiana del sistema.
Sea = (x, y) la masa por unidad de area de la membrana. En estas condiciones, la
energa cin etica del sistema est a dada por
T =
1
2
_ _
R
u
2
t
dxdy, (VI.2.9)
donde la integral se extiende a lo largo de R. La energa potencial se obtiene calculando
el trabajo realizado por la tensi on de la membrana al cambiar su area. Llamemos a la
tensi on por unidad de longitud, que supondremos constante. Al estirarse la membrana se
produce un cambio en el elemento de supercie: dxdy dA, de modo que el incremento
innitesimal de energa potencial el astica est a dada por
dU = (dA dxdy). (VI.2.10)
Si r es el vector de posici on de un punto sobre la membrana, su cambio innitesimal es
dr =
r
x
dx +
r
y
dy. A su vez, los vectores
r
x
dx y
r
y
dy est an asociados a los lados del
elemento de supercie dA. M as especcamente, se cumple que
dA =[
r
x
dx
r
y
dy [ . (VI.2.11)
Dado que, en el sistema cartesiano que estamos utilizando se tiene r = x
i + y
j + u
k,
evaluando el producto vectorial en (VI.2.11) y reemplazando en (VI.2.10), encontramos
dU = (
_
1 + u
2
x
+ u
2
y
1)dxdy). (VI.2.12)
Ahora supondremos que las cantidades [ u
x
[ y [ u
y
[ son sucientemente peque nas como
para aproximar la raz en la forma:
_
1 + u
2
x
+ u
2
y
1+
1
2
(u
2
x
+u
2
y
). Entonces, integrando
sobre toda la regi on R, se tiene
U =
1
2
_ _
R
(u
2
x
+ u
2
y
) dxdy. (VI.2.13)
Contando con T y U es inmediato construir la acci on
S =
_
t
1
t
0
_ _
R
L(u
t
, u
x
, u
y
) dt dxdy. (VI.2.14)
297
VI.2 PRINCIPIO VARIACIONAL PARA SISTEMAS CONTINUOS:
ECUACIONES DIFERENCIALES A DERIVADAS PARCIALES
Anulando la correspondiente variaci on, S = 0, con las condiciones u = 0 en los bordes,
y luego de algunas integraciones por parte, hallamos la ecuaci on de movimiento
u
tt
(u
xx
+ u
yy
) = 0.
Esta es la ecuaci on de ondas bidimensional. Sus soluciones son ondas viajeras que se
propagan con una velocidad v =
_
. Por supuesto, la soluci on concreta requiere el co-
nocimiento de una condici on inicial, u(t
0
, x, y) = f(x, y), que dene la forma inicial
de la membrana. Tambi en se debe especicar una condici on de contorno: u(t, x, y) =
g(t, x, y), x, y C.
Problema sugerido VI.2.1: Construir una densidad lagrangiana que permita obtener
la ecuaci on de difusi on en una dimensi on espacial.
Problema sugerido VI.2.2: Obtener las ecuaciones de movimiento que obedecen los
campos u(t, x) y v(t, x), dada la densidad lagrangiana L =
1
2
_
a(u
t
)
2
b(u
x
)
2
+c(v
t
)
2
d(v
x
)
2
U(u, v)
_
, donde a, b, c, d son constantes, y U es una funci on continua de u y v.
(Generalizar apropiadamente las condiciones en los bordes).
298
Ap endices
299
Ap endice A
Diagonalizaci on de matrices
Sean A una matriz de n n y v un vector de n 1. Se dice que v ,= 0 es autovector
de A si existe un n umero real o complejo tal que [20, 21]
Av = v, v ,= 0. (A.1)
En tal caso se dice que es autovalor de A. En estas condiciones, (A I)v = 0, con
v ,= 0, por lo que la matriz A I debe ser singular:
Det[A I] = 0 . (A.2)
Esta ecuaci on, denominada ecuaci on caracterstica, determina todos los autovalores de
A. Dado que Det[A I] = 0 es un polinomio de grado n en , (A.2) tendr a a lo sumo
n races distintas
k
, reales o complejas.
Una vez hallados los autovalores
k
, es decir, todas las races de (A.2) (tanto reales
como complejas), los autovectores correspondientes v
k
= (v
1k
, . . . , v
nk
)
t
se obtienen
resolviendo la ecuaci on (A.1), es decir, resolviendo el sistema lineal homog eneo
(A
k
I)v
k
= 0, (A.3)
que tendr a necesariamente soluciones v
k
no nulas por ser A
k
I singular. Si v es auto-
vector de A cv, con c ,= 0, es obviamente tambi en un autovector asociado al mismo
autovalor. Y si v y v
son dos autovectores con el mismo autovalor, su suma v + v
tam-
bi en lo ser a (si no nula). El conjunto de autovectores asociados a un dado autovalor
k
,
junto con el vector nulo 0, forma entonces un espacio vectorial, denominado espacio pro-
pio o autoespacio asociado a
k
. Este espacio coincide con el espacio nulo de A
k
I (o
sea, con el conjunto soluci on del sistema (A.3)), y es un subespacio de R
n
(o en general
C
n
, si A o
k
es complejo).
Obviamente, los autovectores correspondientes a dos autovalores distintos son li-
nealmente independientes (LI): v
k
,= cv
k
si
k
,=
k
. An alogamente, se muestra por
inducci on que m 2 autovectores v
k
con autovalores distintos
k
son LI: Si supo-
nemos que v
m
=
m1
k=1
c
k
v
k
Av
m
=
m1
k=1
c
k
k
v
k
=
m
m1
k=1
c
k
v
k
, es decir,
m1
k=1
c
k
(
k
n
)v
k
= 0, lo que es absurdo si los primeros m1 v
k
son LI y
m
,=
k
301
DIAGONALIZACI
ON DE MATRICES
para k = 1, . . . , m 1. Si una matriz tiene n autovalores distintos, tendr a entonces n
autovectores LI, que formar an una base de R
n
(o C
n
en el caso complejo).
Si A posee n autovectores LI, podemos formar una matriz de autovectores
V = (v
1
, . . . , v
n
) (A.4)
de n n no singular, t.q. la k- esima columna de V sea el autovector v
k
. V satisface la
ecuaci on
AV = V A
, A
=
_
_
_
_
_
1
0 . . . 0
0
2
. . . 0
.
.
.
0 0 . . .
n
_
_
_
_
_
Por lo tanto, como Det[V ] ,= 0, podemos escribir
A = V A
V
1
o A
= V
1
AV , (A.5)
con A
diagonal. Se dice entonces que la matriz A es diagonalizable. Por ejemplo, si A
tiene n autovalores distintos, tendr a necesariamente n autovectores LI y ser a por lo tanto
diagonalizable. Por otro lado, A puede ser diagonalizable aun cuando tenga autovalores
repetidos.
Un caso de especial inter es es el de las matrices hermticas, denidas por A
ij
= A
ji
i, j, es decir,
A
= A, (A.6)
donde A
es la matriz adjunta (traspuesta-conjugada). Si A es real, A hermtica implica
A sim etrica. Estas matrices, que surgen frecuentemente en sistemas fsicos, son siempre
diagonalizables, aun si el n umero de autovalores distintos es menor que n. M as a un, sus
autovalores son siempre reales, y los autovectores correspondientes a autovalores distintos
son ortogonales con respecto al producto escalar usual:
v
k
v
k
=
i
v
ik
v
ik
= 0 si
k
,=
k
.
En efecto, si
Av
k
=
k
v
k
, Av
k
=
k
v
k
, (A.7)
multiplicando la primera ecuaci on a izquierda por el vector la v
k
obtenemos
v
k
Av
k
=
k
(v
k
v
k
) ,
dado que v
k
v
k
= v
k
v
k
. Si A es hermtica, v
k
Av
k
=
i,j
v
ik
A
ij
v
jk
es real, y tambi en
es real v
k
v
k
=
i
[v
2
ik
[, por lo que
k
debe ser real. Ahora, tomando el traspuesto
conjugado de la primera ecuaci on en (A.7), tenemos
v
k
A =
k
v
k
,
302
DIAGONALIZACI
ON DE MATRICES
donde hemos tenido en cuenta que A
= A y
k
=
k
. Multiplicando la ecuaci on anterior
a la derecha por el vector columna v
k
y la segunda ecuaci on en (A.7) a la izquierda por
el vector la v
k
y restando, obtenemos
0 = (
k
k
)(v
k
v
k
) ,
de donde v
k
v
k
= 0 si
k
,=
k
. Los autovectores correspondientes a autovalores iguales
pueden tambi en elegirse ortogonales, por lo que en el caso de matrices hermticas, existe
un conjunto completo (base) de autovectores normalizados (v
k
v
k
= 1) tal que
v
k
v
k
=
kk
,
en cuyo caso la matriz V resulta unitaria: V
1
= V
.
Las matrices antihermticas (A
= A) son tambi en siempre diagonalizables y po-
seen un conjunto completo de autovectores ortogonales, pero sus autovalores son imagi-
narios (
k
= i[
k
[). Esto es inmediato ya que si A
= A, la matriz B = iA es hermtica
(B
= iA
= B) y por lo tanto diagonalizable. A = iB es ento nces diagonalizable,
con Av
k
= i
k
v
k
si Bv
k
=
k
v
k
.
Las matrices unitarias (A
= A
1
) son asimismo siempre diagonalizables y poseen
un conjunto completo de autovectores ortogonales, pues pueden escribirse siempre como
exp[iB], con B hermtica. Sus autovalores pueden ser reales o complejos, pero tienen
m odulo 1 ([
k
[ = 1 k). En general, una matriz A ser a diagonalizable con autovectores
ortogonales si y s olo si satisface AA
= A
A, o sea,
[A, A
] = 0 . (A.8)
Tales matrices (denominadas normales) incluyen en particular las hermticas (A
= A),
las antihermticas (A
= A) y las unitarias (A
= A
1
).
Por supuesto, una matriz A puede ser diagonalizable aun sin ser normal, pero en tal
caso los autovectores no ser an todos ortogonales. Por otro lado, las matrices no diagona-
lizables deben tener necesariamente al menos un autovalor repetido
k
, tal que la dimen-
si on del espacio propio asociado sea menor que la multiplicidad de
k
como raz de (A.2)
[20, 21].
303
DIAGONALIZACI
ON DE MATRICES
304
Ap endice B
Identidades de Green
Empecemos por recordar el teorema de la divergencia en n dimensiones (para la de-
mostraci on ver, por ejemplo, [19]):
Teorema VI.0.1 (Gauss-Ostrogradski) Sea D R
n
una regi on acotada, con borde
D, que admite derivadas primeras continuas a trozos. Sea n el vector normal exterior
sobre D. Sea F un campo vectorial que admite derivadas primeras continuas (F C
1
)
en
D = D D. Entonces,
_
D
FdV =
_
D
F ndS , (B.1)
donde dV es el elemento de volumen en D y dS es el elemento de supercie en D.
Ahora, integrando la identidad
(vu) = v u + vu
sobre D y aplicando el teorema anterior obtenemos, para u, v C
2
, obtenemos
_
D
v udV +
_
D
vudV =
_
D
v
u
n
dS , (B.2)
donde
u
n
= n u es la derivada direccional en direcci on normal exterior. Esta es la
llamada Primera Identidad de Green.
Intercambiando u y v en esta identidad y sustrayendo ambas identidades se obtiene la
llamada Segunda Identidad de Green:
_
D
(uv vu) dV =
_
D
(u
v
n
v
u
n
) dS . (B.3)
305
IDENTIDADES DE GREEN
306
Ap endice C
Algunos desarrollos de la Funci on de
Green en autofunciones
Examinaremos aqu la evaluaci on de algunos desarrollos en autofunciones de la fun-
ci on de Green obtenidos de la expresi on general (V.6.63). Habamos visto que en una di-
mensi on la funci on de Green del operador de Sturm-Liouville L[u] = (p(x)u
+q(x)u
en el intervalo [0, a], con la condici on de contorno G(0, x
) = G(a, x
) = 0, es
G(x, x
) =
_
u
1
(x)u
2
(x
)
w
, x < x
u
1
(x
)u
2
(x)
w
, x
< x
w = p(u
1
u
2
u
1
u
2
), (C.1)
donde L[u
1
] = L[u
2
] = 0, con u
1
(0) = u
2
(a) = 0, en cuyo caso w es constante. Notemos
que G(x, x
) = G(x
, x). Por otro lado, la expresi on (V.6.63) conduce a
G(x, x
) =
n=1
u
n
(x)u
n
(x
n
(C.2)
donde L[u
n
] =
n
u
n
, u
n
,= 0, y hemos asumido u
n
real. La primera expresi on representa
entonces la suma de esta serie.
Por ejemplo, la funci on de Green para el operador L =
d
2
dx
2
en el intervalo [0, a] es
G(x, x
) =
_
x(a x
)/a, 0 < x < x
< a
x
(a x)/a, 0 < x
< x < a
(C.3)
Por otro lado, el desarrollo en autofunciones (C.2) conduce a
G(x, x
) =
2
a
n=1
sin(nx/a) sin(nx
/a)
(n/a)
2
,
de modo que para 0 < x < x
< a,
x(a x
)
a
=
2a
n=1
sin(nx/a) sin(nx
/a)
n
2
, (C.4)
lo que puede vericarse directamente efectuando el desarrollo en serie de Fourier de (C.3).
307
ALGUNOS DESARROLLOS DE LA FUNCI
ON DE GREEN EN
AUTOFUNCIONES
Para el operador L =
d
2
dx
2
+ k
2
obtenemos
G(x, x
) =
_
sinh(kx) sinh(k(ax
))
k sinh(ka)
, 0 < x < x
< a
sinh(kx
) sinh(k(ax))
k sinh(ka)
, 0 < x
< x < a
, (C.5)
mientras que el desarrollo (C.2) conduce a
G(x, x
) =
2
a
n=1
sin(nx/a) sin(nx
/a)
k
2
+ (n/a)
2
,
de modo que para 0 < x < x
< a,
sinh(kx) sinh(k(a x
))
k sinh(ka)
=
2
a
n=1
sin(nx/a) sin(nx
/a)
k
2
+ (n/a)
2
, (C.6)
lo que puede tambi en vericarse mediante el desarrollo en serie de Fourier de (C.5). Para
k 0,
sinh(kx) sinh(k(a x
))
k sinh(ka)
kx(k(a x
))
k
2
a
= x(a x
)/a,
recuper andose el resultado (C.4).
Finalmente, para el crculo r < a, recordando el resultado (V.6.80) obtenemos la
identidad
G(r, r
) =
1
2
ln
da
d
=
1
a
2
n=0
m=1
J
n
(k
nm
r/a)J
n
(k
nm
r
/a)e
in(
)
k
2
nm
(J
n
(k
nm
))
2
, (C.7)
donde k
nm
son los ceros de la funci on de Bessel, J
n
(k
nm
) = 0 y, en coordenadas polares,
r = (r, ), r
= (r
), con d la distancia de r a r
y d
la de r a r
=
a
2
r
2
r
.
308
Bibliografa
[1] C.G. Bollini, Apuntes de Matem aticas Especiales II, Universidad Nacional de La
Plata, in edito.
[2] Hadamard, Jacques, Sur les problmes aux drives partielles et leur signication phy-
sique, 4952 (1902).
[3] Earl A. Coddington, An Introduction to Ordinary Differential Equations, Dover Pu-
blications Inc.,New York (1961).
[4] Earl A. Coddington and Norman Levinson, Theory of Ordinary Differential Equa-
tions, Tata McGraw-Hill Publishing, New Delhi (1987).
[5] L. Elsgoltz, Ecuaciones diferenciales y c alculo variacional, Ed. MIR, Mosc u (1969).
[6] N. Piskunov, C alculo diferencial e integral, Tomo II, Ed. MIR, Mosc u (1969).
[7] James Ward Brown and Ruel V. Churchill, Fourier Series and Boundary Value Pro-
blems, McGraw-Hill Inc., New York (1993).
[8] A. Tijonov y A. Samarsky, Ecuaciones de la Fsica Matem atica, MIR, Mosc u (1972).
[9] G. Duff and D. Naylor, Differential equations of applied mathematics, Ed. John
Wiley & Sons, New York (1966).
[10] R. Courant and D. Hilbert, Methods of Mathematical Physics, Interscience Publis-
hers, New York (1953).
[11] Mathematica 9, Wolfram Research Inc., Champaign, IL (2012).
[12] H. Falomir, Notas del curso de M etodos de la Fsica Matem atica,
http://www.smat.sica.unlp.edu.ar/falomir/metodos.html
[13] M. Abramowitz, I. Stegun, Handbook of Mathematical Functions, Ed. Dover Inc.,
New York (1972).
[14] I.S. Gradshteyn, I.M. Ryzhik, Table of Integrals, Series and Products, Ed. Academic
Press, San Diego (2000).
309
BIBLIOGRAF
IA BIBLIOGRAF
IA
[15] A. Erdlyi, Higher Transcendental Functions (The Bateman Manuscript Project), Ed.
McGraw-Hill Inc., New York (1955).
[16] H. Goldstein, Mec anica Cl asica, Ed. Revert e, Barcelona (2006).
L. D. Landau y E. M. Lifshitz, Curso de Fsica Te orica, Vol. 1, Mec anica, Ed. Re-
vert e, Barcelona (1975).
[17] Thomas B. Greenslade Jr., Am. J. Phys. 57, 275 (1989).
[18] J. D. Jackson, Electrodin amica Cl asica, Segunda Edici on, Alhambra, Barcelona
(1980).
J. D. Jackson, Classical Electrodynamics, 3rd Edition, John Wiley, New York
(1998).
D. J. Grifths, Introduction to Electrodynamics, 3rd Edition, Prentice Hall, Upper
Saddle River, New Jersey (1999).
[19] T. Apostol, Calculus, Volumen II, Segunda Edici on, Ed. Revert e, Barcelona (2001).
[20] K. Hoffman, R. Kunze, Linear Algebra, Ed. Prentice-Hall Inc., New Jersey (1971).
[21] G. E. Shilov, Linear Algebra, Ed. Dover Pub. Inc., New York (1977).
310
Vous aimerez peut-être aussi
- Estructuras IsostaticasDocument229 pagesEstructuras IsostaticasJ Santa Cruz100% (1)
- Documento Completo PDFDocument324 pagesDocumento Completo PDFLeddin ItuPas encore d'évaluation
- Curso de Variable ComplejaDocument213 pagesCurso de Variable ComplejaFulanito de Tal100% (4)
- Ec Difs ZaldivarDocument271 pagesEc Difs Zaldivarkoven301185Pas encore d'évaluation
- Razonamiento cuantitativo: Notas de claseD'EverandRazonamiento cuantitativo: Notas de claseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Analisis Vectorial Ejercicios ResueltosDocument7 pagesAnalisis Vectorial Ejercicios Resueltosbrianrcq95100% (1)
- Tp1 2012 Problemas Resueltos-1Document6 pagesTp1 2012 Problemas Resueltos-1elpancasero77100% (1)
- Naon Rossignoli SantangeloDocument324 pagesNaon Rossignoli SantangeloJessica Alejandra HerreraPas encore d'évaluation
- Analisis No Lineal 20211Document51 pagesAnalisis No Lineal 20211josue loaizaPas encore d'évaluation
- Paulo C Carmona T.-Un Primer Curso en Ecuaciones Diferenciales Ordinarias (2007) PDFDocument226 pagesPaulo C Carmona T.-Un Primer Curso en Ecuaciones Diferenciales Ordinarias (2007) PDFNicolàs Temachtiani Aranda AlvarezPas encore d'évaluation
- Problemas Resueltos de Ecuaciones DiferencialesDocument107 pagesProblemas Resueltos de Ecuaciones DiferencialesKJTEJPas encore d'évaluation
- Apuntes EcuDiferenciales O1 PDFDocument147 pagesApuntes EcuDiferenciales O1 PDFFřẫňḱ AlcantaraPas encore d'évaluation
- Resolucion de Ecuaciones Diferenciales Lineales de Segundo Orden Con Coeficientes Variables. Metodo de Frobenius.Document59 pagesResolucion de Ecuaciones Diferenciales Lineales de Segundo Orden Con Coeficientes Variables. Metodo de Frobenius.Juanito JimenezPas encore d'évaluation
- Ecuaciones Diferenciales y Su Grafica. Mariano Hecheverria.Document325 pagesEcuaciones Diferenciales y Su Grafica. Mariano Hecheverria.Af-Rael89100% (1)
- Dinamica de Vigas PDFDocument75 pagesDinamica de Vigas PDFferchovel64Pas encore d'évaluation
- Introducción Al Análisis Matemático Del Método de Elementos FinitosDocument132 pagesIntroducción Al Análisis Matemático Del Método de Elementos FinitosAsangrana Sangrana100% (1)
- Un Primer Curso en Ecuaciones Diferenciales Ordinarias - CarmonaDocument227 pagesUn Primer Curso en Ecuaciones Diferenciales Ordinarias - CarmonaOscar Zavala SalasPas encore d'évaluation
- Un Primer Curso en Ecuaciones Diferenciales Ordinarias - Carmona PDFDocument226 pagesUn Primer Curso en Ecuaciones Diferenciales Ordinarias - Carmona PDFCristian RochaPas encore d'évaluation
- Ana¡Lisis ¡TicoDocument465 pagesAna¡Lisis ¡TicoAlexis C. VigoPas encore d'évaluation
- Ecuaciones DiferencialesDocument237 pagesEcuaciones DiferencialesMarito100% (1)
- (L) Introduccion Al Formalismo de La Mecanica Cuantica (2005 UNED)Document267 pages(L) Introduccion Al Formalismo de La Mecanica Cuantica (2005 UNED)dwyer2403100% (8)
- Ecuaciones Diferenciales OrdinariasDocument113 pagesEcuaciones Diferenciales OrdinariasJhodiskiLGPas encore d'évaluation
- Apuntes de Cálculo en Una y Varias VariablesDocument238 pagesApuntes de Cálculo en Una y Varias Variablesgurrune1Pas encore d'évaluation
- Duenas Rubio-Cal Dif 1 Var PDFDocument292 pagesDuenas Rubio-Cal Dif 1 Var PDFstephPas encore d'évaluation
- Señales y Sistemas Fundamentos MatemáticoDocument339 pagesSeñales y Sistemas Fundamentos MatemáticoWalter DíazPas encore d'évaluation
- Ejercicios MatematicaDocument47 pagesEjercicios MatematicaRoberto CarlosPas encore d'évaluation
- Libro - Ecuaciones Diferenciales PDFDocument298 pagesLibro - Ecuaciones Diferenciales PDFAldair YPPas encore d'évaluation
- Teorema Del Matrimonio EstableDocument67 pagesTeorema Del Matrimonio EstableferreiraortizPas encore d'évaluation
- Manual Unidad 4 Ecuaciones DiferencialesDocument30 pagesManual Unidad 4 Ecuaciones DiferencialesKiara Villanueva QuintanillaPas encore d'évaluation
- Apuntes de Ecuaciones Diferenciales. Mariano EcheverríaDocument325 pagesApuntes de Ecuaciones Diferenciales. Mariano EcheverríaDiego Alejandro DevotoPas encore d'évaluation
- TEoría de HacesDocument82 pagesTEoría de Hacesgiancarlolibreros100% (2)
- Apunte EDO VeronicaDocument81 pagesApunte EDO Veronicadiego beltran100% (1)
- Ecuaciones Diferenciales Ordinarias Renato Alvarez NodarseDocument114 pagesEcuaciones Diferenciales Ordinarias Renato Alvarez NodarseMónica MartínPas encore d'évaluation
- Notas Variable ComplejaDocument133 pagesNotas Variable Complejaezkr1Pas encore d'évaluation
- Ecuaciones DiferencialesDocument183 pagesEcuaciones DiferencialesAndi Jhosep Chilcon QuispePas encore d'évaluation
- Ecuaciones DiferencialesDocument108 pagesEcuaciones DiferencialesAlexis TrinidadPas encore d'évaluation
- Derivadas FraccionariasDocument58 pagesDerivadas FraccionariasEsteban GadaczPas encore d'évaluation
- MAEII LecturesDocument121 pagesMAEII LecturesSbeydy CruzPas encore d'évaluation
- Libro de CavaniDocument74 pagesLibro de CavaniMario Cavani100% (1)
- Apuntes de Ecuaciones Diferenciales y en Diferencias Prospero UnamDocument225 pagesApuntes de Ecuaciones Diferenciales y en Diferencias Prospero UnamLobato Vaz100% (5)
- Origen y Desarrollo Historico Del Calculo InfinitesimalDocument28 pagesOrigen y Desarrollo Historico Del Calculo InfinitesimalBenjaminPas encore d'évaluation
- Ecuaciones Diferenciales Ordinaris. José Antonio Muñoz Gómez, Omar Aguilar LoretoDocument182 pagesEcuaciones Diferenciales Ordinaris. José Antonio Muñoz Gómez, Omar Aguilar Loretojoseamh69062247100% (2)
- Jimenez Quintana Edwars PDFDocument69 pagesJimenez Quintana Edwars PDFcarolinaPas encore d'évaluation
- Ecuaciones Diferenciales INTEC, Unidad IIDocument54 pagesEcuaciones Diferenciales INTEC, Unidad IIsahira TejadaPas encore d'évaluation
- Problemas de Matematicas (Residuos) PDFDocument55 pagesProblemas de Matematicas (Residuos) PDFmapachorraPas encore d'évaluation
- Mecánica CuanticaDocument10 pagesMecánica CuanticaenriquefisicoPas encore d'évaluation
- Ecuaciones DiferencialesDocument106 pagesEcuaciones DiferencialesJairo Kevin Bautista Castillo100% (1)
- El problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónD'EverandEl problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónPas encore d'évaluation
- Tratamiento matemático:: una aproximación en Python y RD'EverandTratamiento matemático:: una aproximación en Python y RPas encore d'évaluation
- Introducción a la proporción y a los vectoresD'EverandIntroducción a la proporción y a los vectoresPas encore d'évaluation
- Curso básico de matemáticas para universitariosD'EverandCurso básico de matemáticas para universitariosPas encore d'évaluation
- Metodo Simplex 2Document23 pagesMetodo Simplex 2Marito LacayoPas encore d'évaluation
- Mates Marea Verde PDFDocument497 pagesMates Marea Verde PDFMiguel León VaqueroPas encore d'évaluation
- Matrices LibroDocument67 pagesMatrices LibroAngel Huaripata SanchezPas encore d'évaluation
- Ra Cada ConcursanteDocument2 pagesRa Cada ConcursanteDANIEL MUCUNPas encore d'évaluation
- FUERZASDocument29 pagesFUERZASYerson VasquezPas encore d'évaluation
- 7.1 Rango de Una Matriz. Método Gauss.Document18 pages7.1 Rango de Una Matriz. Método Gauss.Neil J. Camacho CordovaPas encore d'évaluation
- 2010 Matematicas 52 13Document26 pages2010 Matematicas 52 13kudasai_sugoiPas encore d'évaluation
- 9.1 Stewart - MatricesDocument21 pages9.1 Stewart - MatricesSergio Yanac Salazar25% (4)
- Taller 1Document3 pagesTaller 1Carolina0% (1)
- Algebra Mate UtelDocument51 pagesAlgebra Mate UtelAlex ParedesPas encore d'évaluation
- Ejercicio de Analisis Modal EspectralDocument8 pagesEjercicio de Analisis Modal EspectralPedro Aquiles Pasmay DiasPas encore d'évaluation
- Suma de VectoresDocument7 pagesSuma de VectoreseleuterioromeropePas encore d'évaluation
- Tongo Leon Cristian Alexander - 1558054 - 0Document10 pagesTongo Leon Cristian Alexander - 1558054 - 0junior alidPas encore d'évaluation
- Taller02 Alineal semII 22Document2 pagesTaller02 Alineal semII 22ISABELLA ARMENDARIZ MIRANDAPas encore d'évaluation
- Silabo Analisis MatematicoDocument8 pagesSilabo Analisis MatematicoRichardAlbrechtPas encore d'évaluation
- Archivo 2 - Análisis de Tensiones en Un Sólido Tensor de TensionesDocument20 pagesArchivo 2 - Análisis de Tensiones en Un Sólido Tensor de Tensiones_jgzgPas encore d'évaluation
- Practico Vectores en El EspacioDocument1 pagePractico Vectores en El EspacioLiseth Tinta100% (1)
- Apuntes Garay - Relatividad General - Universidad Complutense de MadridDocument186 pagesApuntes Garay - Relatividad General - Universidad Complutense de MadridJosepPas encore d'évaluation
- Matematica1 (3 1)Document16 pagesMatematica1 (3 1)juan jovg varas gPas encore d'évaluation
- Clases de Matrices Triangular Inferior, Triangular SuperiorDocument7 pagesClases de Matrices Triangular Inferior, Triangular SuperiorRodrigo Fernando ObregonPas encore d'évaluation
- Actividad N 5 Identificaci N y Caracterizaci N de Campos Vectoriales Revisi N Del Intento 3.5 PDFDocument6 pagesActividad N 5 Identificaci N y Caracterizaci N de Campos Vectoriales Revisi N Del Intento 3.5 PDFJohan BPas encore d'évaluation
- Operadores en Espacios de HilbertDocument20 pagesOperadores en Espacios de HilbertSirFloydPas encore d'évaluation
- Lab 1 SolucionarioDocument18 pagesLab 1 SolucionarioSaul 07Pas encore d'évaluation
- TemasDocument2 pagesTemasSTIV artPas encore d'évaluation
- Exposicion AlgebraDocument25 pagesExposicion AlgebrajosePas encore d'évaluation
- Sistema HomogeneoDocument4 pagesSistema HomogeneoDaniel Peña SaenzPas encore d'évaluation
- Soluciones Practico Integrales IndefinidasDocument32 pagesSoluciones Practico Integrales IndefinidasMelissa RicheniPas encore d'évaluation