Académique Documents
Professionnel Documents
Culture Documents
Simulacion de Puente Gruaa
Transféré par
catepu0 évaluation0% ont trouvé ce document utile (0 vote)
14 vues22 pagesTitre original
simulacion de puente gruaa.doc
Copyright
© © All Rights Reserved
Formats disponibles
DOC, PDF, TXT ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme DOC, PDF, TXT ou lisez en ligne sur Scribd
0 évaluation0% ont trouvé ce document utile (0 vote)
14 vues22 pagesSimulacion de Puente Gruaa
Transféré par
catepuDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme DOC, PDF, TXT ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 22
UN AMBIENTE COMPUTACIONAL PARA LA MODELIZACIN DE SISTEMAS
DINMICOS NO LINEALES CON BOND GRAPHS
Ernesto Kofman y Sergio Junco
Departamento de Electrnica
Facultad de Ciencias Exactas, Ingeniera y Agrimensura
Universidad Nacional de Rosario
Roama !"# $is !%%% Rosario Argentina
&el'( %)"* "+% +#") , - Fax( %)"* "+% !.#"
e/mail( ekofman@eie.fceia.unr.edu.ar; sjunco@fceia.unr.edu.ar
Resumen
Se presenta un software de apoyo a la modelizacin de Sistemas Fsicos Dinmicos con Diagramas de Enlaces (Bond Graphs).
Tambin admite combinaciones con Diagramas de Bloques, denominadas Diagramas Mixtos. Es una aplicacin independiente
que funciona en el entorno Windows, y brinda al usuario una interface totalmente grfica para la edicin de dichos diagramas y
su almacenamiento en archivos. Tiene incorporadas herramientas de anlisis causal y la posibilidad de conversin (totalmente
automatizada) de los Diagramas de Enlaces a Diagramas de Bloques Simulink, incluyendo su parametrizacin completa para su
simulacin directa. El programa consta de libreras con los elementos ms comunes de los Diagramas de Enlaces, de Bloques y
Mixtos. Permite adems la incorporacin de nuevos elementos y/o libreras de manera relativamente sencilla. La aplicacin
incluye tambin una serie de modelos confeccionados a modo de ejemplos y un archivo de ayuda con una descripcin exhaustiva
de la utilizacin del mismo.
1. Introduccin
La tcnica de los diagramas de enlaces de energa (BG, por las siglas del ingls $ond
0rap1s) constituye un enfoue estructurado de modeli!aci"n de sistemas din#micos con
notaci"n unificada para fen"menos de los diferentes dominios de la $sica (%arnopp and
&osen'erg, ()*+; ,unco, ()*-). Los BG en esencia capturan los fen"menos de intercam'io
de energa, cuantific#ndolos instant#neamente seg.n la potencia en juego en el sistema.
/ntre sus principales caractersticas y 0entajas, se cuentan las de ser un lenguaje gr#fico,
acausal en principio, y de formulaci"n independiente de las alinealidades presentes en el
sistema. 1u caracterstica gr#fica permite articularlos directamente con 2iagramas de
Bloues (2B), permitiendo as capturar tam'in fen"menos ue no in0olucran intercam'io
de energa sino s"lo interrelaci"n de se3ales en el sistema, y de tal manera construir
com'inaciones de BG con 2B, designadas au como 2iagramas 4i5tos (24).
1iendo simple codificar en un BG las relaciones causales entre las 0aria'les ue descri'en
al sistema, se pueden deri0ar inmediatamente modelos causales tales como 2B o
/cuaciones de /stado (//), de una 2orma completamente algoritmi3ale. 6or ende, en un
BG (o 24) se tienen simult#neamente las estructuras fsica de intercam'io de potencia y la
matem#tica del sistema, facilit#ndose as tanto la ejecuci"n de procedimientos formales (p.
ej. simulaci"n del modelo), como la concreci"n de an#lisis cualitati0os (esta'ilidad,
controla'ilidad, etc) y el desarrollo de tcnicas de dise3o y7o control de los sistemas (,unco,
())+; 8ellier and Granda, ())+ 7 )9 7 ): 7 ))).
La unicidad o genericidad de representaci"n para distintos dominios fsicos deri0adas de
la propiedad de analoga y de la concepci"n energtica en ue se 'asan los BG, y la
posi'ilidad de encapsular modelos y conectarlos a otros (BG y7o 2B) a tra0s de puertos
e5ternos, permiten desarrollar una estrategia de modelado jer#ruica y orientada a o'jetos
(8ellier, ());; 8ellier at al., ())-).
Las propiedades mencionadas con0ierten al mtodo BG en una <erramienta 0aliosa para la
representaci"n de sistemas complejos, permitiendo la informati!aci"n de la modeli!aci"n
con BG, y la manipulaci"n de los modelos computacionales resultantes.
/n este tra'ajo se presenta un soft=are interacti0o de modeli!aci"n de sistemas din#micos
con BG, desarrollado en 'ase a las propiedades anteriores. /l programa est# desarrollado en
>isual Basic con 0ersiones para (- y +; 'its. $unciona 'ajo entornos ?indo=s, +.(5 y
posteriores, lo ue permite el apro0ec<amiento m#5imo de las principales caractersticas de
las aplicaciones ?indo=s afines a las necesidades de la 0isuali!aci"n y manipulaci"n de un
formalismo gr#fico (implementaci"n multidocumento para tra'ajar simult#neamente con
diferentes 0entanas gr#ficas; uso de todos los mtodos gr#ficos de ?indo=s para la edici"n@
cortar, copiar, pegar, mo0er, etc.). $uncionalmente consiste de una estructura a'ierta de
li'reras con componentes correspondientes a las representaciones BG, 2B y 24, con los
cuales el usuario puede construir su modelo. Aodos los componentes del diagrama
resultante (BG o 24) pueden ser parametri!ados, independientemente de la causali!aci"n,
lo cual por una parte facilita el tratamiento de sistemas implcitos, y por otra confiere la
propiedad de reusa'ilidad a los modelos generados con este soft=are, a.n como
su'sistemas en otros modelos ue fuercen situaciones causales distintas. Bna 0e!
formulado el BG '#sico acausal el usuario tiene las opciones de causali!ar manual,
autom#tica, o semiautom#ticamente, paso pre0io a la posi'ilidad de con0ertir
autom#ticamente los modelos generados a modelos 1imulink de todas las 0ersiones, con lo
cual se puede e5plotar toda la potencia de simulaci"n y an#lisis del entorno 4atla'.
/l tra'ajo est# organi!ado de la siguiente manera. /n la 1ecci"n ; se rese3an los principios
de la modeli!aci"n con BG. /n la 1ecci"n + se <ace una descripci"n funcional del soft=are.
/n la 1ecci"n C se descri'en sus principales aspectos inform#ticos@ estructura de datos,
algoritmos, estructura del programa. /n la 1ecci"n 9 se presentan ejemplos de uso y
algunas aplicaciones ue ilustran las cualidades del soft=are. 6or .ltimo, en la 1ecci"n - se
e5traen algunas conclusiones y se indican los pr"5imos pasos de ampliaci"n del entorno.
2. La modelizacin con bond graphs
Dl s"lo fin de facilitar la e5posici"n y la comprensi"n de las caractersticas del soft=are
desarrollado se <ace au un resumen adE<oc de los fundamentos del mtodo. 6or teora,
mtodos y aplicaciones m#s a0an!ados y generales 0er las referencias citadas. La m#s
e5tensa fuente de informaci"n so're el tema se encuentra en la p#gina =e'
<ttp@77===.ece.ari!ona.edu7Fcellier7'g.<tml.
!'* Estructura y componentes del sistema
Bn sistema fsico din#mico puede pensarse como una porci"n delimitada del Bni0erso en la
ue a cada instante se 0erifica un intercam'io (y 'alance) de potencia entre todos los
elementos ue lo componen. /l enfoue ondgrap1 distingue clases elementales de
componentes en funci"n del procesamiento ue stos <acen de la energa. /n su repertorio
'#sico de elementos <ay 2uentes (modelan la incorporaci"n al 1istema de los elementos del
resto del Bni0erso con acciones rele0antes so're auel), almacenadores y disipadores de
energa. Gay adem#s un conjunto de elementos ue modelan la distri'uci"n instant#nea de
la energa entre auellos@ los enlaces (onds), encargados de transportar la potencia; y los
conservadores de potencia 4vnculos, acopladores, conversores5, ue caracteri!an la
estructura en la ue los elementos del primer grupo se re.nen para constituir el sistema.
Hndependientemente de su dominio fsico, dos componentes son modelados por el mismo
elemento ondgrap1 si procesan la energa de la misma forma. /ste <ec<o moti0a la
generali!aci"n de las 0aria'les fsicas a cuatro tipos@ es2uer3o e y 2lu6o f (variales de
potencia, su producto da potencia), e impulso p y despla3amiento q (variales de energa,
son las respecti0as integrales de las dos anteriores; la energa en los almacenadores es una
funci"n de ellas). La &ala * ilustra una generali!aci"n posi'le, con las correspondientes
0aria'les en cada dominio fsico.
Tabla 1: >aria'les Generali!adas
Dominio
fsico
7ariales de
8otencia
7ariales de
Energa
/sfuer!o
e
$lujo
f
4omento
p
2espla!.
q
Araslaci"n
$uer!a 0elocidad Hmpulso 2espla!.
&otaci"n
Aorue 0elocidad
angular
4omento
angular
Ingulo
$luidoE
din#mica
6resi"n caudal Hmpulso
del fluido
>olumen
/lectroE
magnetismo
Aensi"n corriente
$lujo
magE
ntico
8arga
elctrica
Jumica
6otencial
umico
flujo
molar
n.mero
de moles
AermoE
din#mica
Aemp.
a'soluta
flujo de
entropa
entropa
8on 2uer3a y tensin como casos particulares del es2uer3o generali3ado se corresponden las
analogas energa cin9tica energa del campo magn9tico, o inercia oina; y energa
potencial energa del campo el9ctrico, o resorte capacitor. 8on otra <omologaci"n, p.
ej., la de 2uer3a y corriente, <u'iera resultado otra generali!aci"n, tam'in admisi'le. La
&ala ! resume el conjunto de elementos :sicos del lenguaje de modeli!aci"n ondgrap1.
Gay dos tipos de 2uentes, de es2uer3o y de 2lu6o, seg.n cual sea su 0aria'le independiente; y
dos tipos de almacenadores, los capacitores KCK (generali!aci"n del almacenador de
energa potencial) y las inercias KIK (generali!aci"n del almacenador de energa cintica).
Gay dos tipos de vnculos, los K0K y los K1K, am'os multipuerta (admiten 0arios enlaces
adyacentes); representan las estructuras mas simples@ es2uer3o com;n y 2lu6o com;n,
respecti0amente. Ds, todos los enlaces unidos a un 0nculo K0K (K1K) tienen asociada la
misma 0aria'le de es2uer3o (2lu6o). /n el dominio elctrico, un 0nculo K1K (corriente
com.n) representa la estructura de un circuito serie, mientras ue 0nculo K0K (tensi"n
com.n) representa la de un paralelo.
Tabla 2: /lementos '#sicos de los 2iagramas de /nlace
$en"meno
energtico
8lase
/lementos
/jemplo
s
tcnicos
1m'ol
o
Lom'r
e
6otencia
/nerga
&elaci"n
8onstituti
0a
8onser0a
ci"n o
8ontinui
dad de
6otencia
DcoplaE
dores
/nlace
8ardan,
Lnea
elctrica
.
Dcoplador
es
8on0ersor
es
4ultipue
rtas
Aransf
orE
mador
6i3"nE
cremalle
ra
6ist"nE
cilindro
Girado
r
Gir"scop
o
8on0ersi
"n
electroE
mec#nic
a
>nculos
>ncul
o
uno
>elocida
d com.n
8ircuito
serie
>ncul
o
cero
1erie
mec#nic
o
8ircuito
paralelo
Generaci"n
de /nerga
$uentes
4onopue
rtas
$uente
de
esfuer
!o
e4t5
independie
nte
6eso ,
$uente
de f.e.m.
$uente
de
flujo
24t5
independi
ente
$uente
de
corriente
Bom'a
<idr#ulic
a
2isipaci"n
de energa
2isipadores
&esist
or
4e,25 < %
&o!amie
nto
/lectroE
resistor
8onser0aE
ci"n de
/nerga
Dlmacena
dores
8apaci
tor
/lasticid
ad
material
es
Aanue
de agua
Hnercia
Hnductan
cia
Hnercia
mec#nic
a
Bn 0nculo K1K, al conser0ar potencia, tiene una propiedad adicional a la del flujo com.n,
y es ue la sumatoria de los esfuer!os asociados al mismo a tra0s de los enlaces es nula (al
ser nula la sumatoria de potencias y el flujo com.n a todos los enlaces, es simple 0er ue la
suma de los esfuer!os es tam'in nula). Lo mismo pasa con un 0nculo K0K respecto a la
sumatoria de los flujos. Bn 0nculo K1K e5presa la generali!aci"n de la Ley de %irc<<off de
Aensiones, y un 0nculo K0K, la generali!aci"n de la Ley de %irc<<off de 8orrientes.
/structuras complejas reuieren com'inaciones de 0nculos K(K y KMK y de otro tipo de
elementos estructurales, los acopladores y los conversores, entre los ue se cuentan los
trans2ormadores (&F), los giradores (0=), y, por supuesto, los enlaces. Los
trans2ormadores y giradores son 'ipuertas, es decir, tienen conectados solamente dos
enlaces, con lo ue tienen asociados dos pares de 0aria'les de potencia. /l transformador
0incula entre s las 0aria'les del mismo tipo (esfuer!o con esfuer!o y flujo con flujo) con
una relaci"n est#tica y de manera tal ue se conser0e la potencia (esto implica ue los
productos de las 0aria'les de esfuer!o y flujo sean iguales en los dos enlaces). Dlgo similar
reali!a el girador, s"lo ue 0incula las 0aria'les de manera cru!ada (esfuer!o con flujo).
La Fig' * muestra un enlace o ond, al cual se asocian las dos 0aria'les generali!adas de
potencia e y f, cuyo producto e5presa la potencia P transmitida instant#neamente en el
sentido del arp"n o semiflec<a (cuando es positi0a).
Fig. 1@ /nlace. Aransporta potencia P N e . f a la derec<a
/l BG de la Fig' ), ue modela al circuito de la Fig' !a, pro0ee una ilustraci"n simple de
las ideas 0ertidas de la &ala !. 8on las analogas de la &ala * es muy f#cil mostrar ue el
mismo BG modela al sistema mec#nico de la Fig' !. Las 0aria'les an#logas ue
determinan la estructura son@ en el 0nculo K1>, f I 7 ? en el 0nculo >0>, e UC FR .
!'! Causalidad
Gasta au los componentes del sistema <an sido tratados como procesadores de potencia.
6ara tratarlos como procesadores de se3al es necesario asignar relaciones causales entre las
0aria'les asociadas a todos los elementos de un BG. 2ado un elemento de un BG, la
causalidad discrimina a las 0aria'les de potencia de los enlaces adyacentes en dos grupos@
las consideradas entradas al elemento (datos, causas) y las salidas (resultados, e2ectos). /n
el caso de elementos con 0aria'les internas, sto a su 0e! induce relaciones causales de las
0aria'les e5ternas (de potencia) con las 0aria'les internas del elemento.
Fig. 2@ 2os simples sistemas an#logos
Fig. 3@ BG de los sistemas de $ig. ;
/n un enlace pueden darse las dos situaciones '#sicas de la Fig' ", lo ue permite
codificarlas poniendo una arra causal en el e5tremo <acia el cual 0a dirigido el esfuer!o,
en lugar de poner las flec<as tpicas de los 2B.
Fig. 4@ 8ausalidad
/l procedimiento de la Fig' # para asignar causalidad a un BG (18D6@ @eAuential
Causality Assignment 8rocedure, %arnopp and &osen'erg, ()*+) respeta las condiciones
causales detalladas en la &ala )@ las 2uentes s"lo pueden fijar al sistema sus 0aria'les
independientes; teniendo relaciones fijas entre sus 0aria'les de potencia, los elementos
estructurales s"lo pueden asumir un conjunto restringido de todas las configuraciones
causales de sus enlaces adyacentes; los almacenadores pueden asumir cualuier situaci"n
causal, pero la integral es pre2erencial; los disipadores son de causalidad indiferente.
Tabla 3@ Condiciones causales. 1iendo la causalidad completamente independiente del flujo de potencia, la semiflec<a o
arp"n no se di'uj" en ning.n enlace.
Tipo
Causal
Notacin
2iagrama
de /nlaces
2iagrama de Bloues
Necesario
Restringido
Tabla 3@ Condiciones causales(continuaci"n)
Tipo
Causal
Notacin
2iagrama
de /nlaces
2iagrama de Bloues
Preferencial
Hntegral
2eri0ati0a
Arbitrario
/n 'ase a estas condiciones el 18D6 se inicia fijando causalidad a una fuente, para luego
propagarla por los elementos estructurales si es posi'le. /sto se repite <asta ue se agotan
las fuentes. Luego se retoma la misma iteraci"n, pero comen!ando por un almacenador de
energa, asign#ndole la causalidad preferencial. 6or .ltimo, si el BG no ued" plenamente
causali!ado, se repite la iteraci"n empe!ando por alg.n disipador. 1i se llega a esta .ltima
etapa con seguridad <ay la!os alge'raicos en el modelo. /l mtodo asegura el m#5imo
n.mero posi'le de almacenadores con causalidad integral en el modelo. 1us 0aria'les de
energa son la tpica elecci"n de 0aria'les de estado, pero otras son posi'les. Las
ecuaciones de estado y el diagrama de 'loues uedan autom#ticamente definidos. 1e
pueden dar procedimientos sistem#ticos para leerlos del BG causali!ado.
Fig.5@ 6rocedimiento para asignar causalidad (18D6)
!') Diagramas mixtos
1e designar# de este modo a la com'inaci"n de BG con 2B. /n un BG sto puede ser
necesario para representar la acci"n de ciertas se3ales so're algunos de sus elementos, sin
ue en ella medie transferencia de potencia. /sto es tpico en sistemas mec#nicos con
geometra 0aria'le (Fig' ., a y ), y en la modulaci"n por el flujo de e5citaci"n de la
transferencia de potencia en la intercon0ersi"n electromagnticoEmec#nica de energa en las
m#uinas elctricas, entre muc<os ejemplos cita'les. La se3al se inyecta a alg.n elemento
BG ue se califica como modulado para distinguir el <ec<o de ue a<ora tiene un
par#metro 0aria'le; en la notaci"n suele anteponerse una letra B 4o m5. /l comportamiento
energtico es igual al de su par original. 1e tienen as 2uentes moduladas o dependientes,
trans2ormadores y giradores modulados, y resistores, capacitores e inercias moduladas. Bn
24 tam'in puede resultar de la simple cone5i"n de un BG con un 2B ya e5istente, am'os
modelando partes diferentes de un mismo sistema. 6or con0enci"n cuando se toma
informaci"n (se3al) de un BG se lo <ace de un 0nculo, ya ue en su 0ersi"n en se3al stos
contienen puntos de deri0aci"n (0er 2Bs correspondientes en la &ala !). 2e los 0nculos
K0K se toma la informaci"n del esfuer!o com.n, y de los K1K, la del flujo com.n.
4a5 @istema 2sico ideali3ado
45 $ond 0rap1
Fig.6@ Hntercon0ersi"n rototraslacional de mo0imiento
3. Operacin de PowerDynaMo
8oCer DynaBo es una aplicaci"n ue corre en am'ientes ?indo=s. /5isten 0ersiones de
(- 'its (ejecuta'les 'ajo ?indo=s +.5 y posteriores) y de +; 'its (para ?indo=s )9 y
posteriores).2e manera interacti0a el usuario puede editar 2iagramas 4i5tos,
parametri!arlos completamente, asignarles causalidad, y con0ertir el c"digo resultante en
c"digo 1imulink a los fines de la simulaci"n directa.
La Fig' - muestra la 7entana 8rincipal de 8oCer DynaBo, desde la cual se pueden a'rir
modelos e5istentes, modelos nue0os, y li'reras. Aam'in puede accederse a la Ayuda del
8rograma, propiedad compartida por las 0entanas de todos los modelos.
Fig. 7@ La 7entana 8rincipal
8ualuiera de las cuatro lireras disponi'les se a're <aciendo do'le click so're ella con
el mouse (Fig' +). Las li'reras as a'iertas no pueden modificarse. 1in em'argo
a'rindolas como si fueran un modelo pueden agregarse y uitarse elementos a 0oluntad.
6ueden tam'in agregarse nue0os elementos modificando el c"digo de la li'rera (arc<i0os
con e5tensi"n 'li en el directorio Dirary). /stos son arc<i0os de te5to, ue pueden a'rirse
con cualuier editor de te5to. Los modelos se construyen arrastrando elementos desde las
7entanas de Direra <acia las 7entanas de Bodelo (Fig'E), ue pueden a'rirse desde el
4en. desplega'le File de la 7entana 8rincipal, copiando y luego pegando partes desde
otros modelos, di'ujando lneas de se3al y enlaces de potencia, etc. 8oCer DynaBo es una
aplicaci"n multidocumento, por lo ue permite tra'ajar simult#neamente con 0arios
modelos.
Fig. 8@ 7entana de Direra( /lementos BG Lineales
2esde el men. File de una 7entana de Bodelo se puede gra'ar, imprimir y cerrar el
modelo. 2esde el men. Edit, es posi'le seleccionar todo, copiar (al portapapeles), pegar
(desde el portapapeles), eliminar la selecci"n y cortar la selecci"n. /n el men. Fptions se
puede elegir 0er (o no) los par#metros de los elementos de potencia, y la 0ersi"n de
1imulink <acia la cual se 0an a con0ertir los modelos (actualmente se puede elegir entre las
0ersiones (.+; ;.M) y ;.;). /n la opci"n Run se puede generar el modelo 1imulink, y asignar
y c<euear la causalidad del modelo en forma autom#tica. 2esde el men. Gelp se accede a
la ayuda.
Fig. 9@ /jemplo de una 7entana de Bodelo. 488 con e5citaci"n independiente.
Fig. 10@ Bna 7entana de 8ar:metros.
Los enlaces ('onds) pueden di'ujarse clickeando cerca de un elemento y arrastrando <asta
otro. La causalidad tam'in puede asignarse en forma manual <aciendo do'le click so're el
enlace en cuesti"n. Las lneas de se3al pueden di'ujarse OcopiandoP los conectores de se3al
(OQO, ORO, O0P, OSP o OO ) con el 'ot"n derec<o y arrastrando <acia un conector de entrada.
Bna porci"n de la 0entana se selecciona clickeando so're un punto y arrastrando; resultar#n
seleccionados todos los elementos (en rojo) ue ueden en el interior del rect#ngulo
punteado. Bna selecci"n puede copiarse clickeando con el 'ot"n derec<o so're un
elemento de la misma y arrastrando. Los par#metros de un elemento se cam'ian desde su
7entana de 8ar:metros (Fig' *%), ue se a're con do'le click so're el elemento.
4. Descripcin interna de PowerDynaMo
"'* Representacin interna de los modelos
Los modelos son representados internamente por una colecci"n de o'jetos. Gay
'#sicamente dos tipos de o'jetos@ elementos y lneas. Los elementos se 0isuali!an a tra0s
de un control HDaelI asociado. /st#n ordenados en un arreglo, de modo ue cada o'jeto
puede ser un0ocamente identificado por un n.mero (numero de o'jeto), correspondiente al
ndice del arreglo. 1us principales propiedades son@
/l tipo (type), una cadena de + caracteres ue identifica si es un uno, cero, inercia, etc.
La posici"n en la 0entana, dada por dos 0aria'les (le2t, top)
/l n.mero m#5imo de enlaces ue pueden ser conectados. (( para los monopuertas, *
para los 0nculos H1I y H0I; ; para los transformadores y giradores y ninguno para los
elementos ue manejan e5clusi0amente se3al).
/l 0alor de los par#metros asociados.
/l OCaptionP, i.e., las siglas 0isi'les del elemento (I para una inercia, GY para un
girador, etc.)
Los n.meros de conectores de se3al de entrada y de salida asociados.
Bna 0aria'le 'ooleana ue indica si est# o no actualmente seleccionado.
6ara los conectores de se3al, se utili!a tam'in el o'jeto al cual pertenece y la posici"n
dentro de l.
Las lneas se 0isuali!an a tra0s de uno o m#s controles ODineP asociados. 1us
propiedades son@
Los ; elementos ue 0incula (o6* y o6!).
Bna 0aria'le denominada HcausaI ue 0ale M si el enlace no est# causali!ado, ( si se
impone esfuer!o en el sentido de transmisi"n de potencia, ; en el caso contrario, y C si
se trata de una linea de se3al.
Bna 0aria'le 'ooleana ue indica si est# o no actualmente seleccionado.
Los arc1ivos de almacenamiento de los modelos (e5tensi"n 'g2) est#n por lo tanto
constituidos por un conjunto de "rdenes ue indican si se 0a a insertar un elemento o una
lnea, y cuales son las propiedades de dic<o o'jeto. Las lireras son simplemente arc<i0os
de modelo con e5tensi"n 'li, u'icados en el su'directorio Dirary de la aplicaci"n.
"'!' Das rutinas de asignacin de causalidad
Las rutinas de asignaci"n autom#tica de causalidad se 'asan casi totalmente en el
procedimiento de asignaci"n de causalidad descripto en la Fig' ". La rutina nunca cam'ia
la causalidad asignada pre0iamente a un enlace. /n cam'io, detecta errores causales
de'idos tanto a un posi'le conflicto estructural del modelo como a la mala asignaci"n
pre0ia de causalidad por parte del usuario. /n el algoritmo 18D6, <ay '#sicamente dos
acciones@ una de asignar causalidad a un elemento acorde a su prioridad causal, y otra de
e5tender esa causalidad a tra0s de los 0nculos, transformadores y giradores cuando sea
posi'le. /sta segunda acci"n puede ejecutarse directamente mediante la opci"n Extend
Causality del men. Run.
"')' Das rutinas de conversin
Las rutinas de con0ersi"n a diagramas de 'loues 1imulink se 'asan en la e5istencia de un
2B para cada elemento ondgrap1 causali!ado, y por lo tanto de un 2B para cada
2iagrama de /nlaces 8ausali!ado o 24. /n 'ase a esta propiedad se generaron arc<i0os de
te5to (con e5tensi"n 'CFD) ue tienen el c"digo del 2B 1imulink correspondiente a cada
elemento incluido en las li'reras de la aplicaci"n. /stos arc<i0os se encuentran en
diferentes directorios acorde a la 0ersi"n de 1imulink seleccionada para la con0ersi"n.
Los arc<i0os 'CFD (arc<i0os de c"digo) contienen algunos par#metros del 2B
reempla!ados por una e5presi"n entre numerales (OTP). /sta e5presi"n es el nom're de una
0aria'le ue ser# reempla!ada por el programa al generar el c"digo de modo ue los
par#metros del o'jeto correspondiente pasen al c"digo. Dl final de cada arc<i0o de c"digo
<ay una serie de "rdenes ue indican al programa cuales son los nom'res de los 'loues
desde los cuales sale o entra esfuer!o, flujo o se3al. /sta informaci"n es utili!ada cuando se
adicionan las lneas al 2B.
/l procedimiento de con0ersi"n comien!a leyendo el arc<i0o @&A.CFD del directorio
correspondiente a la 0ersi"n de 1imulink. Luego, para cada o'jeto de tipo elemento del
modelo, lee el arc<i0o de c"digo correspondiente a su causalidad. (Gay ; diferentes
arc<i0os para cada elemento seg.n la causalidad). Bna 0e! ledo un arc<i0o, se reempla!an
las e5presiones entre numerales y el c"digo resultante se agrega al c"digo completo.
Luego de leer los arc<i0os de todos los elementos se agregan al c"digo general las lneas
asociadas a las se3ales e y f de cada enlace, seg.n la informaci"n de sus arc<i0os de c"digo
(para las fuentes se agrega s"lo una). 6ara la generaci"n de cada lnea, se utili!a el arc<i0o
de c"digo DIN'CFD' /n las 0ersiones ;.M) y ;.; de 1imulink a cada lnea generada se le
asigna una trayectoria de modo tal ue el 2B 1imulink sea relati0amente ordenado (la
0ersi"n (.+ de 1imulink lo ordena sola).
6or .ltimo, se agrega al c"digo el arc<i0o END'CFD ue contiene el final de c"digo del
2B 1imulink. Bna 0e! generado, el c"digo se guarda en un arc<i0o 1imulink (e5tensi"n
.m) seleccionado por el usuario.
5. Ejemplo de Aplicacin
Bn aplicaci"n tcnica ue demuestra la eficacia de la utili!aci"n de los Bond Grap<s y
0erifica el correcto funcionamiento del programa lo constituye el estudio de la din#mica del
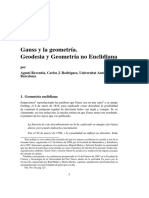
mo0imiento trans0ersal de un Puente Gra (Fig' **). @e supuso ue de un cuerpo de masa
O4P (carro) pende un punto material de masa OmP (carga), sostenido por una 'arra el#stica,
de masa desprecia'le. Bn 488 con e5citaci"n constante act.a so're el carro. Gay fricci"n
asociada al mo0imiento de am'as masas. 1e supone ue <ay 0iento actuando so're la carga.
1o're este modelo se implementa un simple control proporcional de posici"n. El modelo
DB completo se muestra en la Fig' *!.
Aras la ejecuci"n de las rutinas de con0ersi"n de 6o=er 2yna4o se o'tu0o el 2B 1imulink
de la Fig' *). La simple inspecci"n de las Figuras *! y *) permite compro'ar la mayor
simplicidad del 24 frente al 2B.
Ga'indose parametri!ado completamente el 24, se simul" el 2B resultante sin necesidad
de ninguna otra acci"n m#s ue la simple definici"n del tiempo total de simulaci"n y del
algoritmo a utili!ar.
Fig. 11@ /suema del 6uente Gr.a
1e simul" un cam'io de 9 metros en la posici"n de la carga a partir de una situaci"n de
reposo, con una referencia en escal"n, 'ajo la presencia de una fuer!a constante del 0iento.
Los resultados se muestran en la Fig' *", 4a5, 45 y 4c5'
Fig.12@ 4odelo 6o=er 2yna4o del 6uente Gr.a con control (elemental) de posici"n
6. Conclusiones
1e present" el soft=are 8oCerDynaBo, una aplicaci"n 'ajo ?indo=s, independiente,
programado en >isual Basic, ue sir0e de apoyo al modelado gr#fico interacti0o de
sistemas fsicos con 2/ y 24. 6ermite la edici"n, parametri!aci"n, causali!aci"n,
almacenamiento y con0ersi"n a 2B 1imulink de 2iagramas de /nlaces o 4i5tos todo de
manera interacti0a. Los procedimientos de 8oCerDynaBo se 'asan en los mtodos
sistem#ticos y estructurados de modelado disponi'les para 2iagramas de /nlaces. /l
programa posee una amiga'ilidad y facilidad de operaci"n superior en muc<os aspectos a
otros programas actualmente e5istentes, inclusi0e de ni0el comercial. D fin de con0ertirlo
en una <erramienta m#s potente y sinttica se tra'aja actualmente en su complementaci"n
con li'reras de elementos compactos correspondientes a 2iagramas de /nlaces 0ectoriales
y de potencia instant#nea compleja, y de m"dulos estructurales de aparici"n recurrente en
sistemas de distintos dominios fsicoEtcnicos. 1e tra'aja tam'in en la incorporaci"n a
8oCerDynaBo de li'reras de modelos de sistemas comunes en la tcnica (m#uinas
elctricas, actuadores <idr#ulicos, con0ertidores electr"nicos de potencia, etc.), de
programas ue permitan la manipulaci"n sim'"lica de la informaci"n contenida en sus
arc<i0os de modelos, y de rutinas numricas propias de simulaci"n para <acer
autocontenido el ciclo de modelado y simulaci"n.
Referencias
8ellier, $. ());. KGierac<ical nonlinear 'ond grap<@ D unified met<odology for modelling comple5 p<ysical systemsK, @imulation, >ol
9*, Lo. C, pp. ;+ME;C*.
8ellier, $., G. /lm0ist, 4. Utter, and ?. Le0ine. ())9@ K2etermining 4odelsK, in &1e Control GandooJ 4Devine et al', Eds'5, 8<. :, pp.
))E((;, H///E8&8 6ress.
8ellier, $. and ,. Granda (/ds.). ())+7)97):7)). 8roceedings o2 t1e International Con2erences on $ond 0rap1 Bodeling and @imulation
4IC$0B5, 1ociety for 8omputer 1imulation Hnternational 1imulation 1eries.
,unco, 1ergio. ()*-@ Dos Diagramas de Enlaces y un E2ica3 B9todo Estructurado de Bodelado Analtico de @istemas Din:micos. Dnales
del ;do. 8ongreso Latinoamericano de 8ontrol Dutom#tico, Buenos Dires, Uctu're ()*-.
,unco, 1ergio. ())+. @taility Analysis and @taili3ing Control @ynt1esis via DyapunovKs @econd Bet1od Directly on $ond 0rap1s on
Nonlinear @ystems. 6roceedings of IECFNKE), (4aui, GHH, Lo0. (:;M) , pp. ;M-9E;M-).
%arnopp, 2. and &. &osen'erg. ()*+. Introduction to 81ysical @ystem Dynamics' L.V@ 4cGra=EGill.
Fig. 13@ 4odelo 1imulink del 6uente Gr.a con control de posici"n
Fig. 14@ 6osici"n <ori!ontal (a) de la carga@ x2 0s. t , (') del carro@ x 0s. t . (c) 8orriente de armadura@ ia 0s t.
Vous aimerez peut-être aussi
- La Iglesia en La Edad Media Luces y SombrasDocument1 pageLa Iglesia en La Edad Media Luces y Sombraskarine100% (1)
- Eb - M2 - S1 - Tutoría - Lectura - Los Ambientes de Aprendizaje - 2019Document4 pagesEb - M2 - S1 - Tutoría - Lectura - Los Ambientes de Aprendizaje - 2019Andrea Patricia Gómez Gordillo100% (1)
- SESIÓN DE APRENDIZAJE N°109 Viernes 17 de SeptiembreDocument5 pagesSESIÓN DE APRENDIZAJE N°109 Viernes 17 de SeptiembreStephanieCynthiaRetamozoSurcoPas encore d'évaluation
- 10 Películas Que Estudiantes de Derecho y Abogados Tienen Que VerDocument9 pages10 Películas Que Estudiantes de Derecho y Abogados Tienen Que VercoramoresPas encore d'évaluation
- Ficha GEA - Sintaxis Del Ingl SDocument5 pagesFicha GEA - Sintaxis Del Ingl SrandomeoPas encore d'évaluation
- Protesta e Indignacion Global PDFDocument304 pagesProtesta e Indignacion Global PDFclaudio_beraunPas encore d'évaluation
- Modelo de Adaptacion de Callista Roy Mapa Conceptual 305876 Downloable 1628542Document2 pagesModelo de Adaptacion de Callista Roy Mapa Conceptual 305876 Downloable 1628542Wilson Fernando Cuartas ArboledaPas encore d'évaluation
- Historia y estructura de la Caja HuancayoDocument22 pagesHistoria y estructura de la Caja HuancayoKevh Márquez100% (5)
- Kapitúlu I Keimadura Hadia Halo Loss Atu PrinttDocument40 pagesKapitúlu I Keimadura Hadia Halo Loss Atu PrinttTithus Carvalho vital100% (3)
- Problemáticas y Soluciones de La Rama JudicialDocument6 pagesProblemáticas y Soluciones de La Rama JudicialFabiola AvilaPas encore d'évaluation
- Curso UnalDocument104 pagesCurso UnalManuela Giraldo RivasPas encore d'évaluation
- Subgrupos InvariantesDocument2 pagesSubgrupos InvariantesGilberto Platero AratiaPas encore d'évaluation
- dOCE Caracteristicas de Abuso EmocionalDocument2 pagesdOCE Caracteristicas de Abuso EmocionalMarta Boza de PereiraPas encore d'évaluation
- Planificación CRPDocument4 pagesPlanificación CRPjose miguel100% (2)
- La eclesiología de Efesios y su relación con la cristologíaDocument7 pagesLa eclesiología de Efesios y su relación con la cristologíaWalter GarciaPas encore d'évaluation
- Lara SocabayaDocument113 pagesLara SocabayaAnonymous 3a5pAB100% (1)
- Farmacología Clínica. Semana 13. Orientaciones Estudio Independiente.Document4 pagesFarmacología Clínica. Semana 13. Orientaciones Estudio Independiente.Keiber JuradoPas encore d'évaluation
- Funciones y cualidades del tutor virtualDocument4 pagesFunciones y cualidades del tutor virtualMaría Sofia JiménezPas encore d'évaluation
- 11 ¿Dios Dice Algo de Los DinosauriosDocument1 page11 ¿Dios Dice Algo de Los DinosauriosYaky BlancoPas encore d'évaluation
- Cómo se enamoran los hombres según la cienciaDocument4 pagesCómo se enamoran los hombres según la cienciaapolinarPas encore d'évaluation
- Reglas para Su Uso Ortográfico GDocument3 pagesReglas para Su Uso Ortográfico GAnonymous MN1vxrEAPas encore d'évaluation
- Guia GappisaDocument4 pagesGuia GappisaJoni Witzi100% (1)
- Alianza Popular Revolucionaria AmericanaDocument27 pagesAlianza Popular Revolucionaria AmericanacavcvalderramaPas encore d'évaluation
- Discurso Narrativo PPT FinalDocument32 pagesDiscurso Narrativo PPT FinalPaula Benavides MéndezPas encore d'évaluation
- Apunte. Prof. Vargas Imp 01 - 98 - Alan PDFDocument196 pagesApunte. Prof. Vargas Imp 01 - 98 - Alan PDFHipatia de AlejandríaPas encore d'évaluation
- Cuadro Comparativo de La Idelogia de Antiguo Egipto y Antigua BabiloniaDocument3 pagesCuadro Comparativo de La Idelogia de Antiguo Egipto y Antigua Babiloniadany0% (1)
- Las ConjuncionesDocument4 pagesLas ConjuncionesDiana StanislaoPas encore d'évaluation
- PG 06 07 Reventos PDFDocument27 pagesPG 06 07 Reventos PDFCristian SanesPas encore d'évaluation
- Acción OblicuaDocument6 pagesAcción OblicuaLuis E Villegas A.Pas encore d'évaluation
- Borsani y QuinteroDocument61 pagesBorsani y QuinteroSitzel BarreiroPas encore d'évaluation