Vous aimerez peut-être aussi
- Esercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoD'EverandEsercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoÉvaluation : 5 sur 5 étoiles5/5 (1)
- Maffucci Esercizi ElettrotecnicaDocument11 pagesMaffucci Esercizi ElettrotecnicaGior GioPas encore d'évaluation
- Eserciziario Controlli AutomaticiDocument72 pagesEserciziario Controlli AutomaticigiovannaPas encore d'évaluation
- CatenariaDocument24 pagesCatenariaLorenzo LupiPas encore d'évaluation
- Costruzioni in Zona SismicaDocument76 pagesCostruzioni in Zona SismicaAlessandro RiposiPas encore d'évaluation
- Sistemi Del Secondo OrdineDocument43 pagesSistemi Del Secondo OrdineMarco Salvatore VanadìaPas encore d'évaluation
- Soluzione Miur Quesiti Simulazione Seconda Prova Fisica 2016Document5 pagesSoluzione Miur Quesiti Simulazione Seconda Prova Fisica 2016Skuola.netPas encore d'évaluation
- Tavola Periodica PDFDocument1 pageTavola Periodica PDFCiccio BiancaPas encore d'évaluation
- Isolamento Controllo VibrazioniDocument26 pagesIsolamento Controllo Vibrazionikingofchaos87Pas encore d'évaluation
- Exac04 Esercizimaffucci Retiinregimesinusoidale v2.2Document15 pagesExac04 Esercizimaffucci Retiinregimesinusoidale v2.2francescoPas encore d'évaluation
- Colp ArieteDocument40 pagesColp ArieteFolpoPas encore d'évaluation
- Regime SinusoidaleDocument10 pagesRegime SinusoidaleGior GioPas encore d'évaluation
- Analisi LimiteDocument44 pagesAnalisi LimiteMario ROSSIPas encore d'évaluation
- Esercizi Di FisicaDocument4 pagesEsercizi Di FisicaAnonymous ArybDnR8bPas encore d'évaluation
- 2007 05 04 Prova Itinere Meccanica Testo SoluzioniDocument7 pages2007 05 04 Prova Itinere Meccanica Testo Soluzionigesu.promettimiPas encore d'évaluation
- Quinta EsercDocument8 pagesQuinta Esercdomenico123Pas encore d'évaluation
- Forza Drag PaliDocument15 pagesForza Drag PaliMa RcoPas encore d'évaluation
- 03-Meccanica Del Volo SpazialeDocument13 pages03-Meccanica Del Volo Spazialemarcobianchi198000Pas encore d'évaluation
- EdomDocument12 pagesEdomAlfredo DagostinoPas encore d'évaluation
- Esercizi MeccAppDocument51 pagesEsercizi MeccAppPaoloMaccaronioPas encore d'évaluation
- ESCM1 Rev PDFDocument66 pagesESCM1 Rev PDFPierre PapeenPas encore d'évaluation
- Balistica ExternaDocument11 pagesBalistica ExternaIñigo C. SánchezPas encore d'évaluation
- Elettrotecnica Circuiti Regime SinusoidaleDocument7 pagesElettrotecnica Circuiti Regime SinusoidaleMauro FaillaPas encore d'évaluation
- Lastre Piane TDC LMDocument28 pagesLastre Piane TDC LMteocomiPas encore d'évaluation
- Telaio Metodo Matriciale (Fabio Di Trapani)Document17 pagesTelaio Metodo Matriciale (Fabio Di Trapani)Raducanu TheodorPas encore d'évaluation
- 05 - Dinamica - Esempio Di Oscillatore Semplice Smorzato e FDL PDFDocument15 pages05 - Dinamica - Esempio Di Oscillatore Semplice Smorzato e FDL PDFrolohe15207Pas encore d'évaluation
- Metodo Degli Spostamenti - RichiamiDocument8 pagesMetodo Degli Spostamenti - RichiamifollettostancoPas encore d'évaluation
- Esami 5Document27 pagesEsami 5Antonio CostanzoPas encore d'évaluation
- Guia Ingenieria Parte 2Document92 pagesGuia Ingenieria Parte 21enero1990ggmPas encore d'évaluation
- Dinamica2 - Meccanica Dei FluidiDocument11 pagesDinamica2 - Meccanica Dei FluidiMarcoAntelmiPas encore d'évaluation
- Esercizi Elettromagnetismo v2Document48 pagesEsercizi Elettromagnetismo v2Francesco ProvenzanoPas encore d'évaluation
- Colonna ModelloDocument22 pagesColonna ModelloRubino Vincenzo0% (1)
- Anteprima Del Libro Esercizi Di Fisica - RosatiDocument16 pagesAnteprima Del Libro Esercizi Di Fisica - Rosatimelo astroPas encore d'évaluation
- Eera Manuale ItaDocument20 pagesEera Manuale ItaginoPas encore d'évaluation
- Costruzioni 6 TrasformatoriDocument24 pagesCostruzioni 6 TrasformatoribrutusPas encore d'évaluation
- Esercitazione 5 PDFDocument5 pagesEsercitazione 5 PDFCristian RossiPas encore d'évaluation
- Pendolo A TorsioneDocument10 pagesPendolo A TorsioneAnna MoriPas encore d'évaluation
- Cap4 Esercizi SvoltiDocument5 pagesCap4 Esercizi SvoltiAntonella ValentePas encore d'évaluation
- Mat Did 041350Document9 pagesMat Did 041350emilianoPas encore d'évaluation
- 2011.2.3 Soluzioni EserciziDocument4 pages2011.2.3 Soluzioni EsercizidaunsoroksimPas encore d'évaluation
- Elaborato Di Maturità ScientificaDocument11 pagesElaborato Di Maturità ScientificaPietro FavalesiPas encore d'évaluation
- Pilastri Instabilità Colonna Modello PDFDocument22 pagesPilastri Instabilità Colonna Modello PDFAleksiey PellicciaPas encore d'évaluation
- SC Costruz Cornetti Soluz Lez 44Document7 pagesSC Costruz Cornetti Soluz Lez 44Antonella FabrizioPas encore d'évaluation
- Esercizi FisicaI ChimiciDocument57 pagesEsercizi FisicaI ChimiciRossana LimaPas encore d'évaluation
- 1 Solaio 1-0Document23 pages1 Solaio 1-0guidodecosisPas encore d'évaluation
- PrandtlDocument8 pagesPrandtlCarloDoimoPas encore d'évaluation
- 4473 Seconda EsercDocument6 pages4473 Seconda EsercErjona VokrriPas encore d'évaluation
- Ana2013 Der SolDocument6 pagesAna2013 Der SolOsama BafiliPas encore d'évaluation
- Caduta Gravi TOTALEDocument12 pagesCaduta Gravi TOTALEmarcotalla86Pas encore d'évaluation
- Esercitazione 3 PDFDocument3 pagesEsercitazione 3 PDFCristian RossiPas encore d'évaluation
- 2006.02.13 - III - Appello - Testo - SoluzioniDocument6 pages2006.02.13 - III - Appello - Testo - Soluzionigesu.promettimiPas encore d'évaluation
- Esercitazione 2 PDFDocument3 pagesEsercitazione 2 PDFCristian RossiPas encore d'évaluation
- Fisica1 Febbraio 2020Document5 pagesFisica1 Febbraio 2020matteoPas encore d'évaluation
- AnalisiModale PDFDocument19 pagesAnalisiModale PDFGiacPas encore d'évaluation
- Trave Su Suolo ElasticoDocument13 pagesTrave Su Suolo ElasticoevvivaevvivaevvaiPas encore d'évaluation
- Trasduttore PiezolelettricoDocument14 pagesTrasduttore PiezolelettricoinblindwetrustPas encore d'évaluation
- Cal Colo FlangeDocument31 pagesCal Colo FlangeAnonymous yQ7SQrPas encore d'évaluation
- Cinematica PDFDocument6 pagesCinematica PDFMarco GambiPas encore d'évaluation
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019D'EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Pas encore d'évaluation
- Relazione Prof. Modoni - CroceDocument35 pagesRelazione Prof. Modoni - CrocemaztortonPas encore d'évaluation
- NTC 2018Document1 pageNTC 2018maztortonPas encore d'évaluation
- 02 Urtt Regione Toscana Interventi Minimi Eccezionali Non Ammessi 310114Document8 pages02 Urtt Regione Toscana Interventi Minimi Eccezionali Non Ammessi 310114maztortonPas encore d'évaluation
- Rig 1979 2 137Document18 pagesRig 1979 2 137JezzaclarksonPas encore d'évaluation
- 11 Istruzioni Montaggio Domino Style FontanotDocument40 pages11 Istruzioni Montaggio Domino Style FontanotmaztortonPas encore d'évaluation
- 01 Ntc2008 Qualifica Materiali Unibg Marini 31143Document38 pages01 Ntc2008 Qualifica Materiali Unibg Marini 31143maztortonPas encore d'évaluation
- Il Degrado Delle Strutture in Cemento Armato Tra Teoria e Sperimentazione La Corrosione Delle Armature Per Carbonatazione Del Calcestruzzo DWBBDocument16 pagesIl Degrado Delle Strutture in Cemento Armato Tra Teoria e Sperimentazione La Corrosione Delle Armature Per Carbonatazione Del Calcestruzzo DWBBmaztortonPas encore d'évaluation
- 01 Ntc2008 Qualifica Materiali Unibg Marini 31143Document38 pages01 Ntc2008 Qualifica Materiali Unibg Marini 31143maztortonPas encore d'évaluation
- Lavorazione TeleguidataDocument2 pagesLavorazione TeleguidatamaztortonPas encore d'évaluation
- 04 NTC 11 MaterialiDocument33 pages04 NTC 11 MaterialimaztortonPas encore d'évaluation
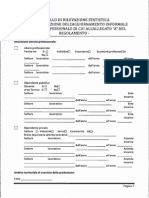
- 03 Modulo Di Rilevazione StatisticaDocument2 pages03 Modulo Di Rilevazione StatisticamaztortonPas encore d'évaluation
- Pali - Prove Dinamiche Ad Alta DeformazioneDocument14 pagesPali - Prove Dinamiche Ad Alta DeformazioneValentino PiescoPas encore d'évaluation
- CTS - Linee Guida - 01-11Document4 pagesCTS - Linee Guida - 01-11maztortonPas encore d'évaluation
- Argini FluvialiDocument32 pagesArgini FluvialimaztortonPas encore d'évaluation
- Fondazioni Turbo Alternatori A3-014387Document63 pagesFondazioni Turbo Alternatori A3-014387maztortonPas encore d'évaluation
- Manual e Install Azi One Trali CC IDocument86 pagesManual e Install Azi One Trali CC ImaztortonPas encore d'évaluation
- ENEL It Lineeguida Capitolo5 5 ATTRAVERSAMENTIDocument36 pagesENEL It Lineeguida Capitolo5 5 ATTRAVERSAMENTImaztortonPas encore d'évaluation
- Progettazione Sismica TanksDocument9 pagesProgettazione Sismica TanksmaztortonPas encore d'évaluation
- Ormus CompletoDocument3 pagesOrmus CompletoKunga Legpa100% (1)
- L Inquinamento AmbientaleDocument19 pagesL Inquinamento AmbientaleTheStarsOfYoutube TSOYTPas encore d'évaluation
- Valitutti PPT 82074 c16Document32 pagesValitutti PPT 82074 c16Matilde IemmoloPas encore d'évaluation