Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Operate A Word Processing Application BasicDocument46 pagesOperate A Word Processing Application Basicapi-24787158267% (3)
- Jack Pumpkinhead of Oz - L. Frank BaumDocument68 pagesJack Pumpkinhead of Oz - L. Frank BaumbobbyejaynePas encore d'évaluation
- Pneumatic Reciprocating Hacksaw Machine: March 2016Document6 pagesPneumatic Reciprocating Hacksaw Machine: March 2016SaurabhPas encore d'évaluation
- Anchoring ScriptDocument2 pagesAnchoring ScriptThomas Shelby100% (2)
- Problem-Solution Essay Final DraftDocument4 pagesProblem-Solution Essay Final Draftapi-490864786Pas encore d'évaluation
- Finite Element Analysis - 2 Marks - All 5 UnitsDocument13 pagesFinite Element Analysis - 2 Marks - All 5 UnitsMohan Prasad.M77% (30)
- Worcester Vs Ocampo - DigestDocument1 pageWorcester Vs Ocampo - DigestMaria Raisa Helga YsaacPas encore d'évaluation
- Fundamentals of Biochemical Engineering Dutta Solution ManualDocument6 pagesFundamentals of Biochemical Engineering Dutta Solution Manualhimanshu18% (22)
- Semi-Detailed Lesson Plan in Tle (Cookery) Mhaylani O. Otanes-Flores 1 February 16, 2022 (Wednesday) 7 TLE-Cookery 1 10Document4 pagesSemi-Detailed Lesson Plan in Tle (Cookery) Mhaylani O. Otanes-Flores 1 February 16, 2022 (Wednesday) 7 TLE-Cookery 1 10Mhaylani Otanes100% (1)
- Lab Report: SimulinkDocument2 pagesLab Report: SimulinkM Luqman FarooquiPas encore d'évaluation
- Renewable Energy SourcesDocument27 pagesRenewable Energy SourcesgkarthikeyanPas encore d'évaluation
- SN DiagramDocument7 pagesSN DiagramManas Kotru100% (1)
- Call Option Agreement Free SampleDocument2 pagesCall Option Agreement Free Sampleapi-235666177Pas encore d'évaluation
- Atomic ModelsDocument34 pagesAtomic Modelsmuli aniPas encore d'évaluation
- New Theory of RelativityDocument20 pagesNew Theory of RelativitygkarthikeyanPas encore d'évaluation
- Logic GatesDocument24 pagesLogic GatesgkarthikeyanPas encore d'évaluation
- Rent AgreementDocument4 pagesRent AgreementgkarthikeyanPas encore d'évaluation
- Conversion Gate01Document44 pagesConversion Gate01gkarthikeyanPas encore d'évaluation
- "Anyone Who Can Contemplate Quantum Mechanics Without Getting Dizzy Hasn't Understood It." - Niels BohrDocument31 pages"Anyone Who Can Contemplate Quantum Mechanics Without Getting Dizzy Hasn't Understood It." - Niels BohrgkarthikeyanPas encore d'évaluation
- Michelson and MorleyDocument7 pagesMichelson and MorleygkarthikeyanPas encore d'évaluation
- Physics7 141013112342 Conversion Gate02Document11 pagesPhysics7 141013112342 Conversion Gate02gkarthikeyanPas encore d'évaluation
- ME 6503 DME 2 Marks With AnswerDocument15 pagesME 6503 DME 2 Marks With AnswerheartyseePas encore d'évaluation
- Hedu e 20 2020 PDFDocument35 pagesHedu e 20 2020 PDFgkarthikeyanPas encore d'évaluation
- Department of Mechanical Engineering BM 7103 Fuels and Combustion Question BankDocument7 pagesDepartment of Mechanical Engineering BM 7103 Fuels and Combustion Question BankgkarthikeyanPas encore d'évaluation
- MtapDocument1 pageMtapraymart zalunPas encore d'évaluation
- Design and Fabrication of Go Kart Electric Vehicle Ijariie9739Document3 pagesDesign and Fabrication of Go Kart Electric Vehicle Ijariie9739gkarthikeyanPas encore d'évaluation
- Me6602 2M RejinpaulDocument21 pagesMe6602 2M Rejinpaulfahamith ahamedPas encore d'évaluation
- Calendar of Events 19 20Document2 pagesCalendar of Events 19 20MUTHUKUMARPas encore d'évaluation
- UGC Regulations 2016Document10 pagesUGC Regulations 2016gkarthikeyanPas encore d'évaluation
- Automobile Engg 2 MarksDocument20 pagesAutomobile Engg 2 Markskrishna8808Pas encore d'évaluation
- Diploma QPDocument2 pagesDiploma QPgkarthikeyanPas encore d'évaluation
- Automobile Engineering.M1Document14 pagesAutomobile Engineering.M1gkarthikeyanPas encore d'évaluation
- Automobile Engineering (May2014) PDFDocument2 pagesAutomobile Engineering (May2014) PDFgkarthikeyanPas encore d'évaluation
- Automobile Engg 2 MarksDocument20 pagesAutomobile Engg 2 Markskrishna8808Pas encore d'évaluation
- Automobile Engg 2 MarksDocument20 pagesAutomobile Engg 2 Markskrishna8808Pas encore d'évaluation
- Chapter 02 Multiple Choice Questions With AnswersDocument2 pagesChapter 02 Multiple Choice Questions With AnswersKuldeep Kushwaha100% (2)
- Chapter 02 Multiple Choice Questions With AnswersDocument2 pagesChapter 02 Multiple Choice Questions With AnswersKuldeep Kushwaha100% (2)
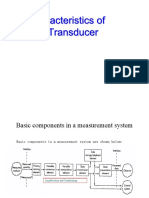
- Characteristic of TransducerDocument40 pagesCharacteristic of Transducergkarthikeyan50% (2)
- Machine Design - Lesson 14 Design of ShaftsDocument4 pagesMachine Design - Lesson 14 Design of ShaftsgkarthikeyanPas encore d'évaluation
- 4 Transistor Miniature FM TransmitterDocument2 pages4 Transistor Miniature FM Transmitterrik206Pas encore d'évaluation
- Leseprobe Aus: "Multilingualism in The Movies" Von Lukas BleichenbacherDocument20 pagesLeseprobe Aus: "Multilingualism in The Movies" Von Lukas BleichenbachernarrverlagPas encore d'évaluation
- Pakistan's Professor Mafia - Pakistan - DAWNDocument5 pagesPakistan's Professor Mafia - Pakistan - DAWNMuhammad Bilal A. RPas encore d'évaluation
- What Is ForexDocument8 pagesWhat Is ForexnurzuriatyPas encore d'évaluation
- GrandEsta - Double Eyelid Surgery PDFDocument2 pagesGrandEsta - Double Eyelid Surgery PDFaniyaPas encore d'évaluation
- HTMLDocument115 pagesHTMLBoppana yaswanthPas encore d'évaluation
- Engineering Academy: ESE Conventional Revision TEST - IDocument8 pagesEngineering Academy: ESE Conventional Revision TEST - Ividya chakitwarPas encore d'évaluation
- WE) The Accentual Structure of English WordsDocument8 pagesWE) The Accentual Structure of English Wordszhannatagabergen2606Pas encore d'évaluation
- Audi A4 Quattro 3.0 Liter 6-Cyl. 5V Fuel Injection & IgnitionDocument259 pagesAudi A4 Quattro 3.0 Liter 6-Cyl. 5V Fuel Injection & IgnitionNPPas encore d'évaluation
- Thermal ComfortDocument6 pagesThermal ComfortHoucem Eddine MechriPas encore d'évaluation
- ContinentalDocument61 pagesContinentalSuganya RamachandranPas encore d'évaluation
- Types of Sutures and Their IndicationsDocument6 pagesTypes of Sutures and Their IndicationsAdina BurciuPas encore d'évaluation
- Chapter 2 - Professinal Ethics Legal LiabilityDocument29 pagesChapter 2 - Professinal Ethics Legal LiabilityThị Hải Yến TrầnPas encore d'évaluation
- NefelometriaDocument25 pagesNefelometriaJuan Marcos Martinez ZevallosPas encore d'évaluation
- Recurrent: or Reinfection Susceptible People: Adult With Low Im Munity (Especially HIV Patient) Pathologic ChangesDocument36 pagesRecurrent: or Reinfection Susceptible People: Adult With Low Im Munity (Especially HIV Patient) Pathologic ChangesOsama SaidatPas encore d'évaluation
- My AnalysisDocument4 pagesMy AnalysisMaricris CastillanoPas encore d'évaluation
- Jurnal Upload DR Selvi PDFDocument8 pagesJurnal Upload DR Selvi PDFRudi ChyprutPas encore d'évaluation
- Richards and Wilson Creative TourismDocument15 pagesRichards and Wilson Creative Tourismgrichards1957Pas encore d'évaluation
- Lesson 6 S and V AgreementDocument6 pagesLesson 6 S and V AgreementLinh Ngọc NguyễnPas encore d'évaluation
- MNT-Notes Pt. 2Document58 pagesMNT-Notes Pt. 2leemon.mary.alipao8695Pas encore d'évaluation
- Experiment No 5 ZenerDocument3 pagesExperiment No 5 ZenerEugene Christina EunicePas encore d'évaluation