Vous aimerez peut-être aussi
- Ingenieria Industrial 2018Document4 pagesIngenieria Industrial 2018Anthony Porras Mendez67% (3)
- Informe de ConsolidacionDocument36 pagesInforme de ConsolidacionGary Chavez VasquezPas encore d'évaluation
- Norma Iso 9001-2015Document30 pagesNorma Iso 9001-2015ERICK ALBERTO WHANG CASTILLOPas encore d'évaluation
- Cuadro Comparativo Modelos PedagogicosDocument3 pagesCuadro Comparativo Modelos PedagogicosDiana Aguilar100% (1)
- Parámetros Más Importantes para La Selección de Una TurbinaDocument7 pagesParámetros Más Importantes para La Selección de Una TurbinaAnthony Porras MendezPas encore d'évaluation
- Ventiladores IndustrialesDocument20 pagesVentiladores IndustrialesAnthony Porras Mendez60% (5)
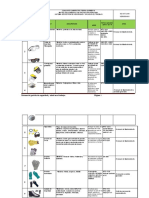
- Matriz EPPDocument7 pagesMatriz EPPGiovanny AbadiaPas encore d'évaluation
- La Causalidad Del Primer Motor InmóvilDocument24 pagesLa Causalidad Del Primer Motor InmóvilDavid AgustínPas encore d'évaluation
- Reconozco Y Manejo Mis Emociones: Sesión de Aprendizaje de TutoríaDocument6 pagesReconozco Y Manejo Mis Emociones: Sesión de Aprendizaje de TutoríaNenita Aguilar100% (1)
- Beneficios de La Implementación Del BIMDocument156 pagesBeneficios de La Implementación Del BIMJuan Javier Macalupu Cuadros100% (1)
- Matriz de DecisionDocument7 pagesMatriz de DecisionAnthony Porras MendezPas encore d'évaluation
- Reflexiones Periodismo Redes SocialesDocument63 pagesReflexiones Periodismo Redes Socialescdperiodismo80% (15)
- Formulario FinanzasDocument2 pagesFormulario FinanzasAnthony Porras MendezPas encore d'évaluation
- Esquemas Neumaticos PDFDocument8 pagesEsquemas Neumaticos PDFAnthony Porras MendezPas encore d'évaluation
- Tablas Normal Chi T F PDFDocument6 pagesTablas Normal Chi T F PDFAnonymous WIDbfSVEPas encore d'évaluation
- Dilema ÉticoDocument8 pagesDilema ÉticoAnthony Porras MendezPas encore d'évaluation
- TEMA13 Triaxial (CD)Document20 pagesTEMA13 Triaxial (CD)Fernando Pacuri ZapanaPas encore d'évaluation
- Prehistoria y Edad Media de EnfermeriaDocument5 pagesPrehistoria y Edad Media de EnfermeriaHenry Fernando ILTW0% (1)
- Factores Influyentes en La VentaDocument10 pagesFactores Influyentes en La VentaJheymy Fabian YauriPas encore d'évaluation
- Esquema - Perfil de Proyecto de IESTPDocument8 pagesEsquema - Perfil de Proyecto de IESTPchascalucero14738Pas encore d'évaluation
- 03 Carga Axial 04.11.2016Document25 pages03 Carga Axial 04.11.2016alfredo polin reyesPas encore d'évaluation
- Poder y Estudios de Las Danzas en El PeruDocument78 pagesPoder y Estudios de Las Danzas en El PeruJonathan Cahuana TacuriPas encore d'évaluation
- Mixtura Metodológica en La Investigación Educativa FinalDocument12 pagesMixtura Metodológica en La Investigación Educativa FinaldocjorsePas encore d'évaluation
- MRUVDocument5 pagesMRUVJulio Cesar Callata RojasPas encore d'évaluation
- Cargador Frontal PartesDocument8 pagesCargador Frontal PartesterranokiaPas encore d'évaluation
- Porque Soy Un Pueblo CelosoDocument34 pagesPorque Soy Un Pueblo CelosoraguerrePas encore d'évaluation
- George Chagua-Niveles de Comprension LectoraDocument127 pagesGeorge Chagua-Niveles de Comprension LectoraAzu GutiérrezPas encore d'évaluation
- 1-Rectificadores y Parametros de RendimientoDocument7 pages1-Rectificadores y Parametros de RendimientoAndrés GutierrezPas encore d'évaluation
- Sigam Guamal MagdalenaDocument22 pagesSigam Guamal Magdalenakey100% (1)
- Trabajo Contextualizado ColaborativoDocument7 pagesTrabajo Contextualizado ColaborativoJose Osorio100% (1)
- CinematicaDocument22 pagesCinematicaCamy ZambranoPas encore d'évaluation
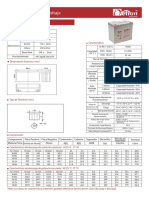
- Batería Gel 150AHDocument2 pagesBatería Gel 150AHsantiago navarroPas encore d'évaluation
- Prueba de Conocimiento Seleccion OperativaDocument3 pagesPrueba de Conocimiento Seleccion OperativaCarlos GaitanPas encore d'évaluation
- Separata N°1 - Biología PDFDocument2 pagesSeparata N°1 - Biología PDFYessy Quispe100% (1)
- Avance y Rev. para MahuelosDocument6 pagesAvance y Rev. para MahuelosErick VidalPas encore d'évaluation
- Manual Makro Gold Kruzer EspañolDocument32 pagesManual Makro Gold Kruzer EspañolreynaldoPas encore d'évaluation
- Comunicación AntonimoDocument2 pagesComunicación AntonimoAngel MaciasPas encore d'évaluation
- TALLER QUIMICA No. 6-LA MATERIA Y SUS PROPIEDADES (II)Document3 pagesTALLER QUIMICA No. 6-LA MATERIA Y SUS PROPIEDADES (II)maria fernandaPas encore d'évaluation