Vous aimerez peut-être aussi
- Optocoupler Selection GuideDocument28 pagesOptocoupler Selection GuideAnonymous 0CnvpxSPas encore d'évaluation
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 pagesFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisPas encore d'évaluation
- Digital Power-Conversion For The Analog EngineerDocument12 pagesDigital Power-Conversion For The Analog EngineerfjwoemcuPas encore d'évaluation
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDocument7 pagesAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VarghesePas encore d'évaluation
- TO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemDocument11 pagesTO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemLava KumarPas encore d'évaluation
- Regulated Power SupplyDocument12 pagesRegulated Power SupplySachie1912Pas encore d'évaluation
- Unit 1: 18Cs206 Basic of Electrical and Electronics EngineeringDocument21 pagesUnit 1: 18Cs206 Basic of Electrical and Electronics EngineeringAJAY SPas encore d'évaluation
- Time Domain Based Digital PWM Controller For DC-DC ConverterDocument12 pagesTime Domain Based Digital PWM Controller For DC-DC ConverterTetiHidayatiPas encore d'évaluation
- Raptor Ser Ies High Perfor Mance Mo Tor DrivesDocument7 pagesRaptor Ser Ies High Perfor Mance Mo Tor DrivesJohn-Michael 'J' BillsPas encore d'évaluation
- Doc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFDocument66 pagesDoc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFsivananda11Pas encore d'évaluation
- Power Supplies Module 03Document20 pagesPower Supplies Module 03LeonardoXanMPas encore d'évaluation
- Design A Single Phase Inverter With A LCL Filter: AbstractDocument4 pagesDesign A Single Phase Inverter With A LCL Filter: AbstractPham Viet QuanPas encore d'évaluation
- Mikromeia Board For PIC18FJDocument2 pagesMikromeia Board For PIC18FJmorghabiPas encore d'évaluation
- Active Power Factor Correction for Single Phase Full Bridge RectifierDocument6 pagesActive Power Factor Correction for Single Phase Full Bridge RectifierAnand KumarPas encore d'évaluation
- Technical HandbookDocument51 pagesTechnical HandbookBryan WahyuPas encore d'évaluation
- 4000 Series Logic and Analog CircuitryDocument13 pages4000 Series Logic and Analog Circuitrysage.electconPas encore d'évaluation
- dx-9100 Extended Digital ControllerDocument128 pagesdx-9100 Extended Digital Controllermubs73Pas encore d'évaluation
- Regression Model For Tuning PID ControllerDocument11 pagesRegression Model For Tuning PID ControllerSreepradha SivaramPas encore d'évaluation
- Siemens SIMATIC S5 Programmable Controller ManualDocument548 pagesSiemens SIMATIC S5 Programmable Controller Manualnasir_khan_24Pas encore d'évaluation
- Adaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesDocument6 pagesAdaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesMario SammyPas encore d'évaluation
- VLSI Digital Signal Processing Systems by Keshab K ParhiDocument25 pagesVLSI Digital Signal Processing Systems by Keshab K Parhirahil1650% (4)
- Intelligent Street Light Control While Obstacle PassingDocument32 pagesIntelligent Street Light Control While Obstacle Passingprashanthi_komatireddyPas encore d'évaluation
- Anu PDFDocument9 pagesAnu PDFAkhtarPas encore d'évaluation
- MTP 610 P 210 Manual Book LeonicsDocument2 pagesMTP 610 P 210 Manual Book LeonicsRido ManikPas encore d'évaluation
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992Pas encore d'évaluation
- Dkg-109 Automatic Mains Failure UnitDocument46 pagesDkg-109 Automatic Mains Failure UnitmohsenPas encore d'évaluation
- Hardware Used - Power Supply and MicrocontrollerDocument46 pagesHardware Used - Power Supply and MicrocontrollerRocky SinghPas encore d'évaluation
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiPas encore d'évaluation
- Assembly Manual K2639Document32 pagesAssembly Manual K2639Asse NavPas encore d'évaluation
- Power Electronic (Pe) SystemDocument63 pagesPower Electronic (Pe) SystemFarid DafaPas encore d'évaluation
- Manual Pluto DataDocument8 pagesManual Pluto DataDouglas RodriguesPas encore d'évaluation
- Simatic Net S7-400 - Industrial Ethernet CP 443-1 (EX30)Document80 pagesSimatic Net S7-400 - Industrial Ethernet CP 443-1 (EX30)Ale LoveraPas encore d'évaluation
- NPS711B9Document504 pagesNPS711B9funkyznPas encore d'évaluation
- 5.3 Plasma Surface Transition: 5.3.1 Plasma Boundary Sheath, Bohm CriterionDocument8 pages5.3 Plasma Surface Transition: 5.3.1 Plasma Boundary Sheath, Bohm CriterioniordachePas encore d'évaluation
- Cover Sheet of Block Logic Diagram and Schematic Diagram Drawings Bus Transfer System (BTS) Panel Block Logic Diagram and Schematic DiagramDocument17 pagesCover Sheet of Block Logic Diagram and Schematic Diagram Drawings Bus Transfer System (BTS) Panel Block Logic Diagram and Schematic Diagramindrajit mondalPas encore d'évaluation
- Data Communication Lab GuideDocument105 pagesData Communication Lab GuideTalha HashmiPas encore d'évaluation
- Three-Phase SCR Battery Charger Installation GuideDocument20 pagesThree-Phase SCR Battery Charger Installation GuideJohnTPPas encore d'évaluation
- 2080-LC10-12DWD: M810 8di 4ai Config 4do Source 12V DC Catalogue NoDocument3 pages2080-LC10-12DWD: M810 8di 4ai Config 4do Source 12V DC Catalogue NojkhkbkbjbjhPas encore d'évaluation
- LL MSL 100G PDFDocument36 pagesLL MSL 100G PDFAlexandre FurtadoPas encore d'évaluation
- Eb355 80 4Document44 pagesEb355 80 4David CochlinPas encore d'évaluation
- Three Phase SCR Power Converter Controlled by MicrocontrollerDocument8 pagesThree Phase SCR Power Converter Controlled by MicrocontrollerIsmael Ochoa JimenezPas encore d'évaluation
- Buck Boost Transformer - Push Pull TransformerDocument4 pagesBuck Boost Transformer - Push Pull Transformermaka27Pas encore d'évaluation
- DSE2541 Installation Instructions PDFDocument2 pagesDSE2541 Installation Instructions PDFBERANGER DAVESNE DJOMALIA SIEWEPas encore d'évaluation
- How To Remove The SVCHOST - Exe Virus - EhowDocument5 pagesHow To Remove The SVCHOST - Exe Virus - EhowJelena ZafirovicPas encore d'évaluation
- 486 N20038 PDFDocument6 pages486 N20038 PDFguddu13481Pas encore d'évaluation
- Robot Programming in "C": Tak Auyeung, Ph.D. February 15, 2006Document160 pagesRobot Programming in "C": Tak Auyeung, Ph.D. February 15, 2006MaYur D AeronPas encore d'évaluation
- Fuzzy Based Reconfigurable Controller For BLDC MotorDocument7 pagesFuzzy Based Reconfigurable Controller For BLDC MotorkandibanPas encore d'évaluation
- DsPIC Elmer 166 en USDocument78 pagesDsPIC Elmer 166 en USnawzat100% (2)
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaPas encore d'évaluation
- MATLAB Based Analysis and Simulation of Multilevel InvertersDocument3 pagesMATLAB Based Analysis and Simulation of Multilevel InvertersMalikAlrahabiPas encore d'évaluation
- Smart Relay: Ordering InformationDocument5 pagesSmart Relay: Ordering InformationbhagyeshPas encore d'évaluation
- Fire Bird Software ManualDocument62 pagesFire Bird Software ManualEyantra_resourcesPas encore d'évaluation
- Design of Microstrip Patch Antenna Using Slotted Partial Ground and Addition of Stairs and Stubs For UWB ApplicationDocument8 pagesDesign of Microstrip Patch Antenna Using Slotted Partial Ground and Addition of Stairs and Stubs For UWB ApplicationNidhi PanditPas encore d'évaluation
- Digital Modified Sine Wave Inverter CircuitDocument6 pagesDigital Modified Sine Wave Inverter CircuitMaster RajaPas encore d'évaluation
- WinCE Development NoteDocument3 pagesWinCE Development Noteadmred_quimicosPas encore d'évaluation
- PDC Lab ManualDocument33 pagesPDC Lab ManualBhanu SriPas encore d'évaluation
- Space Vector Pulse Width Modulation-Libre PDFDocument6 pagesSpace Vector Pulse Width Modulation-Libre PDFlongPas encore d'évaluation
- B2 Spice Version 5Document163 pagesB2 Spice Version 5maria4nowPas encore d'évaluation
- Precision Curvature-Compensated CMOS Bandgap ReferenceDocument10 pagesPrecision Curvature-Compensated CMOS Bandgap ReferenceAnonymous TPVfFif6TOPas encore d'évaluation
- 8049Document239 pages8049adnantanPas encore d'évaluation
- Fully Integrated On-Chip Switched Capacitor DC-DC ConvertersDocument136 pagesFully Integrated On-Chip Switched Capacitor DC-DC ConvertersasamarahPas encore d'évaluation
- F.3 Odm-075v11n0Document1 pageF.3 Odm-075v11n0faapctba2913Pas encore d'évaluation
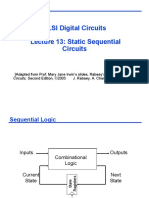
- Static Sequential CircuitsDocument23 pagesStatic Sequential CircuitsAnubhav SinghPas encore d'évaluation
- SRC1203Document3 pagesSRC1203RikenzPas encore d'évaluation
- PastPapersDownload (6) - 220227 - 212448Document11 pagesPastPapersDownload (6) - 220227 - 212448Deer DeerPas encore d'évaluation
- CCDs Convert Light to Digital ImagesDocument13 pagesCCDs Convert Light to Digital ImagesSourodeep BasuPas encore d'évaluation
- LG Spec-Sheet Lv340c 011972 PRDocument4 pagesLG Spec-Sheet Lv340c 011972 PRSanPas encore d'évaluation
- ECPC-201 Analysis and Synthesis of Networks Exam QuestionsDocument4 pagesECPC-201 Analysis and Synthesis of Networks Exam QuestionsANOOP GUPTAPas encore d'évaluation
- Hanstar SMD 'Hot Air' Rework StationsDocument5 pagesHanstar SMD 'Hot Air' Rework StationsFerdinand EstanislaoPas encore d'évaluation
- 308Mhz/315Mhz/418Mhz/433.92Mhz Low-Power, FSK Superheterodyne ReceiverDocument19 pages308Mhz/315Mhz/418Mhz/433.92Mhz Low-Power, FSK Superheterodyne ReceiverBlagoja GjakovskiPas encore d'évaluation
- 5 A &B Delta Modulation and Adaptive Delta ModulationDocument5 pages5 A &B Delta Modulation and Adaptive Delta Modulationkingibzz82Pas encore d'évaluation
- ELECTRICAL Sample QuestionDocument17 pagesELECTRICAL Sample QuestionSambit MohapatraPas encore d'évaluation
- Improve 3-Phase Motor Efficiency with CapacitorsDocument5 pagesImprove 3-Phase Motor Efficiency with CapacitorsBunny LuckyPas encore d'évaluation
- Spintronics Based Random Access Memory: A ReviewDocument19 pagesSpintronics Based Random Access Memory: A ReviewAgtc TandayPas encore d'évaluation
- DX DiagDocument34 pagesDX DiagjPas encore d'évaluation
- High-Speed Low-Power Viterbi Decoder Design For TCM DecodersDocument16 pagesHigh-Speed Low-Power Viterbi Decoder Design For TCM DecodersShruti Tajne100% (1)
- SLAM Manual 2009 - With DigitalDocument34 pagesSLAM Manual 2009 - With DigitalMohammed SairawanPas encore d'évaluation
- PM5100 User GuideDocument96 pagesPM5100 User GuideGerson ChavarriaPas encore d'évaluation
- I/A Series Hardware Intelligent Transmitter/ 0 To 20 Ma Output Interface Module (FBM39)Document8 pagesI/A Series Hardware Intelligent Transmitter/ 0 To 20 Ma Output Interface Module (FBM39)CHRISTIANABGPas encore d'évaluation
- Transmission Lines and WaveguidesDocument21 pagesTransmission Lines and WaveguidesVASANTHKUMAR M SPas encore d'évaluation
- GE-Surge Capacitors PDFDocument3 pagesGE-Surge Capacitors PDFjohesapaPas encore d'évaluation
- K35 Touchpanel ManualDocument15 pagesK35 Touchpanel ManualSamuel YipPas encore d'évaluation
- 1155dBTE 504Document13 pages1155dBTE 504Shubham AgrawalPas encore d'évaluation
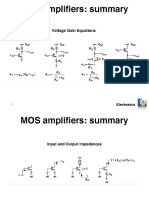
- MOS Transistor - ExerciseDocument22 pagesMOS Transistor - Exercisehasan bishPas encore d'évaluation
- AVR 33 Series 10 150 KVA 2Document2 pagesAVR 33 Series 10 150 KVA 2phyomauk htunPas encore d'évaluation
- Duty909-1-Phase - SI1S - CompleteDocument26 pagesDuty909-1-Phase - SI1S - Completevignesh kPas encore d'évaluation
- Chapter 5Document53 pagesChapter 5Sherkhan3Pas encore d'évaluation