Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Damping Calculations for Race Vehicle SuspensionDocument99 pagesDamping Calculations for Race Vehicle SuspensionManu PantPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- DOOSAN DL200-3 WHEELED LOADER Service Repair Manual PDFDocument55 pagesDOOSAN DL200-3 WHEELED LOADER Service Repair Manual PDFdfjjskemmdm100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Bicycle Frames: Standard Test Methods ForDocument6 pagesBicycle Frames: Standard Test Methods ForFelipe ArcePas encore d'évaluation
- Unit 08.26 - Komatsu 930E Haul TruckDocument19 pagesUnit 08.26 - Komatsu 930E Haul TruckJose Pablo Fuentes100% (1)
- Design and Fabrication of Automated Manual Gear Transmission in Motor BikesDocument57 pagesDesign and Fabrication of Automated Manual Gear Transmission in Motor Bikesanmol6237Pas encore d'évaluation
- Sri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet NoDocument1 pageSri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet Noanmol6237Pas encore d'évaluation
- Nissan Walkin Chennai 1Document2 pagesNissan Walkin Chennai 1anmol6237Pas encore d'évaluation
- HW Starter Manual March HresolutionDocument23 pagesHW Starter Manual March HresolutionCharan KumarPas encore d'évaluation
- Nissan Walkin ChennaiDocument2 pagesNissan Walkin Chennaianmol6237Pas encore d'évaluation
- ME 443/643: Introduction to HyperMeshDocument37 pagesME 443/643: Introduction to HyperMeshanmol6237Pas encore d'évaluation
- Industrial EnclosuresDocument56 pagesIndustrial Enclosuresanmol6237Pas encore d'évaluation
- List of over 150 Solidworks clientsDocument4 pagesList of over 150 Solidworks clientsanmol6237Pas encore d'évaluation
- RGB Color TableDocument5 pagesRGB Color Tableanmol6237Pas encore d'évaluation
- Nissan Walkin ChennaiDocument2 pagesNissan Walkin Chennaianmol6237Pas encore d'évaluation
- Sri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet NoDocument2 pagesSri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet Noanmol6237Pas encore d'évaluation
- Creo2 Adv PrimerDocument174 pagesCreo2 Adv PrimerAmit JhaPas encore d'évaluation
- Nissan Walkin ChennaiDocument2 pagesNissan Walkin Chennaianmol6237Pas encore d'évaluation
- M Tech Project List 2015 NewDocument5 pagesM Tech Project List 2015 Newanmol6237Pas encore d'évaluation
- Tool Design TerminologyDocument5 pagesTool Design Terminologyanmol6237Pas encore d'évaluation
- Parametric Modeling With Creo ParametricDocument41 pagesParametric Modeling With Creo Parametricfrancesca050168Pas encore d'évaluation
- Press Tool Cutting ForceDocument1 pagePress Tool Cutting Forceanmol6237Pas encore d'évaluation
- GD AdvantagesDocument1 pageGD Advantagesanmol6237Pas encore d'évaluation
- GDDocument2 pagesGDanmol6237Pas encore d'évaluation
- Term - 1 - Class - X Communicative English - 2010Document27 pagesTerm - 1 - Class - X Communicative English - 2010Nitin GargPas encore d'évaluation
- Train Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD PassengerDocument1 pageTrain Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD Passengeranmol6237Pas encore d'évaluation
- Ceed Model Question PaperDocument21 pagesCeed Model Question PaperSatvender SinghPas encore d'évaluation
- SHEARINGDocument6 pagesSHEARINGanmol6237Pas encore d'évaluation
- Gate Syllabus For Mech EnggDocument4 pagesGate Syllabus For Mech Engganmol6237Pas encore d'évaluation
- More Than 100 Keyboard Shortcuts Must ReadDocument3 pagesMore Than 100 Keyboard Shortcuts Must ReadChenna Keshav100% (1)
- Train Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD PassengerDocument1 pageTrain Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD Passengeranmol6237Pas encore d'évaluation
- E2SEM1MT2TD06102012Document3 pagesE2SEM1MT2TD06102012anmol6237Pas encore d'évaluation
- Intro To CFD ProblemDocument1 pageIntro To CFD ProblemlinoPas encore d'évaluation
- Ansys Training Book.Document15 pagesAnsys Training Book.Sarath Babu SPas encore d'évaluation
- 3406 Marine Engine PDFDocument2 pages3406 Marine Engine PDFHamilton Miranda50% (4)
- Steering Column Parts ListDocument20 pagesSteering Column Parts ListNaimahSulistianingsihPas encore d'évaluation
- Julia Eco Entertainer Coach Sale SheetDocument7 pagesJulia Eco Entertainer Coach Sale Sheetauweia1Pas encore d'évaluation
- 19L1370124F1 PDFDocument23 pages19L1370124F1 PDFRaul Soteras EstebanPas encore d'évaluation
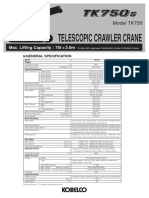
- Telescopic Crawler Crane: Model TK750Document6 pagesTelescopic Crawler Crane: Model TK750Mohan CharanchathPas encore d'évaluation
- Aircraft Landing Gear SystemsDocument120 pagesAircraft Landing Gear SystemsAldwin Ipac Naguiat100% (2)
- Manitou MSI MH 20 EN PDFDocument8 pagesManitou MSI MH 20 EN PDFPeterPas encore d'évaluation
- Can-Am Off-Road - Catalogue Accessories ATV MY21 - EMEA enDocument35 pagesCan-Am Off-Road - Catalogue Accessories ATV MY21 - EMEA enTOTYAPas encore d'évaluation
- Conectores PCM Jeep Grand Cherokee 4.7 2008Document11 pagesConectores PCM Jeep Grand Cherokee 4.7 2008yanbarrientos100% (1)
- Aurtta004 TestDocument9 pagesAurtta004 Testgreat hubPas encore d'évaluation
- BRUTE FORCE 750 4x4i Eps PDFDocument190 pagesBRUTE FORCE 750 4x4i Eps PDFDANIEL BELLAPas encore d'évaluation
- 2021 RE 4S - 205 Facelift UG ProvisionalDocument92 pages2021 RE 4S - 205 Facelift UG Provisionalchip3944096Pas encore d'évaluation
- SECTION 211-03 Steering LinkageDocument5 pagesSECTION 211-03 Steering LinkageTiến Phát Công ty TNHH Đầu Tư Xây DựngPas encore d'évaluation
- MODEL 963, 964 With CODE Z1G (EBS, Knorr) Without CODE Z1H (EBS, Wabco)Document7 pagesMODEL 963, 964 With CODE Z1G (EBS, Knorr) Without CODE Z1H (EBS, Wabco)Mahmoud FaragPas encore d'évaluation
- Brosur Axor 2528 CH PDFDocument4 pagesBrosur Axor 2528 CH PDFyogi ganda pratamaPas encore d'évaluation
- Mitsubishi F4A-51: 4 SPEED FWD With Lock Up (Electronic Con Trol)Document2 pagesMitsubishi F4A-51: 4 SPEED FWD With Lock Up (Electronic Con Trol)Krzysztof KjbPas encore d'évaluation
- Terminos Siglas Obd IIDocument6 pagesTerminos Siglas Obd IIPipe MejiaPas encore d'évaluation
- Comparation Gas Engine 030714Document2 pagesComparation Gas Engine 030714GunturMudaAliAkbarPas encore d'évaluation
- Buick V 6 Casting Numbers and Internal SpecsDocument5 pagesBuick V 6 Casting Numbers and Internal SpecsAnonymous vyUisZImrPas encore d'évaluation
- JD PC2322 PreviewDocument41 pagesJD PC2322 Previewpiter suarezPas encore d'évaluation
- Types of Electric VehiclesDocument17 pagesTypes of Electric VehiclesjokerPas encore d'évaluation
- Suspension MK7Document378 pagesSuspension MK7Tiburon TigrePas encore d'évaluation
- 5664 3 4CX Eco T4 FINALDocument8 pages5664 3 4CX Eco T4 FINALAndrei AndreiPas encore d'évaluation
- TRCR Aac 2.0 Cat 91-97Document1 pageTRCR Aac 2.0 Cat 91-97Sam Van NieuwenhovenPas encore d'évaluation
- Powerkit Engine 6M21 Series: General SpecificationsDocument2 pagesPowerkit Engine 6M21 Series: General SpecificationsstorkbPas encore d'évaluation
- Real Time Simulation and Parametric Optimization Applied To Racing Cars The BMW Team Brasil Case PDFDocument47 pagesReal Time Simulation and Parametric Optimization Applied To Racing Cars The BMW Team Brasil Case PDFDebra JacksonPas encore d'évaluation
- SSP483 - Audi A7 Sportback - Convenience Electronics and Audi Active Lane AssistDocument36 pagesSSP483 - Audi A7 Sportback - Convenience Electronics and Audi Active Lane AssistSaepudin JuhriPas encore d'évaluation