Vous aimerez peut-être aussi
- Sistemas de Varios Grados de LibertadDocument17 pagesSistemas de Varios Grados de LibertadDaniel González Ortega50% (2)
- 3.1 Análisis de Un Sistema Sujeto A Fuerza Armónica ExternaDocument1 page3.1 Análisis de Un Sistema Sujeto A Fuerza Armónica ExternaEdwin Hernandez50% (2)
- Soberanes Hernandez Luis Alberto 1.2. Componentes y Funcionamiento de Los Sistemas Auxiliares de Los Motores de Combustión Interna ReciprocantesDocument22 pagesSoberanes Hernandez Luis Alberto 1.2. Componentes y Funcionamiento de Los Sistemas Auxiliares de Los Motores de Combustión Interna ReciprocantesMichel EspinozaPas encore d'évaluation
- Unidad 1 Diseño Mecánico 1Document559 pagesUnidad 1 Diseño Mecánico 1Adrian Lopez80% (5)
- Vibraciones de Sistemas de Un Grado de Libertad Con Excitación ArmónicaDocument5 pagesVibraciones de Sistemas de Un Grado de Libertad Con Excitación ArmónicaOsvaldo VRPas encore d'évaluation
- Unidad 5. Sistemas de Varios Grados de Libertad: 5.2 Acoplamiento de Coordenadas y Coordenadas PrincipalesDocument4 pagesUnidad 5. Sistemas de Varios Grados de Libertad: 5.2 Acoplamiento de Coordenadas y Coordenadas PrincipalesIvan ZamoraPas encore d'évaluation
- Aplicaciones de Mecanismos en Diferentes Sistemas MecánicosDocument11 pagesAplicaciones de Mecanismos en Diferentes Sistemas MecánicosEduardo RomoPas encore d'évaluation
- UNIDAD - III Teoria y Criterio de Fallas Por Carga DinamicasDocument7 pagesUNIDAD - III Teoria y Criterio de Fallas Por Carga DinamicasArquimedes Storm92% (12)
- Unidad 4 Métodos EnergéticosDocument5 pagesUnidad 4 Métodos EnergéticosDaniel Rosas33% (3)
- 4.2-Metodos de AplicacionDocument5 pages4.2-Metodos de AplicacionBautista AldoPas encore d'évaluation
- Unidad 5 Sistemas de Grados de LibertadDocument29 pagesUnidad 5 Sistemas de Grados de LibertadSergio Elizalde100% (1)
- Metodo Analitico Series de FourierDocument12 pagesMetodo Analitico Series de FourierVampy Sacrifice100% (1)
- Potencia de Una Bomba Centrifuga Entre Una Cisterna y Un Deposito ElevadoDocument25 pagesPotencia de Una Bomba Centrifuga Entre Una Cisterna y Un Deposito ElevadoAntonioCruzVargas60% (10)
- Materiales EjemplosDocument3 pagesMateriales EjemplosSalimPas encore d'évaluation
- 3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosDocument22 pages3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosJose ReginoPas encore d'évaluation
- Balanceo EstaticoDocument6 pagesBalanceo EstaticoNerio Elguera Medina0% (1)
- Kloomok MuffleyDocument17 pagesKloomok MuffleyluisPas encore d'évaluation
- Diagrama EsfuerzoDocument4 pagesDiagrama EsfuerzoMiguel Sanchez100% (1)
- Teoria de Mohr Modificado I Y ESFUERZO NDocument3 pagesTeoria de Mohr Modificado I Y ESFUERZO NDiann LeePas encore d'évaluation
- Propiedades OrtogonalesDocument7 pagesPropiedades OrtogonalesCarlos HernandezPas encore d'évaluation
- Analisis y Sint. Unidad 4Document14 pagesAnalisis y Sint. Unidad 4edgarPas encore d'évaluation
- Grafica Esfuerzo - Numero de CiclosDocument6 pagesGrafica Esfuerzo - Numero de CiclosRobert Hilario Mar Oc100% (1)
- Análisis de Un Sistema Sujeto A Fuerza Armónica ExternaDocument3 pagesAnálisis de Un Sistema Sujeto A Fuerza Armónica ExternaWilbert CabreraPas encore d'évaluation
- 5.8 EntropiaDocument9 pages5.8 EntropiaJuan SotoPas encore d'évaluation
- 5.5 Movimiento de Un Cuerpo RigidoDocument5 pages5.5 Movimiento de Un Cuerpo RigidoChucho MoralesPas encore d'évaluation
- Tres EjerciciosDocument4 pagesTres EjerciciosCamila LopezPas encore d'évaluation
- Estudio de Las Vibraciones y Aplicaciones en Diversos Medios 11Document13 pagesEstudio de Las Vibraciones y Aplicaciones en Diversos Medios 11Alfredo Alejandro Valenzuela100% (1)
- Principio de Funcionamiento de Los Motores Reciprocantes de Combustión Externa, (Motor Stirling), Osuna FloresDocument11 pagesPrincipio de Funcionamiento de Los Motores Reciprocantes de Combustión Externa, (Motor Stirling), Osuna FloresBrandon Osuna100% (1)
- 4.6 Aplicación de ContadoresDocument6 pages4.6 Aplicación de ContadoresnicolPas encore d'évaluation
- Cinemática de La VibraciónDocument18 pagesCinemática de La VibraciónJoshua RomeroPas encore d'évaluation
- Unidad 5 Vibraciones MecanicasDocument24 pagesUnidad 5 Vibraciones MecanicasRaul Alain Ramirez CuadradoPas encore d'évaluation
- Unidad 4 HidraulicaDocument16 pagesUnidad 4 HidraulicatrastePas encore d'évaluation
- Dinamica 1Document42 pagesDinamica 1Joel50% (2)
- Método de Las Fuerzas para El Análisis de Sistemas (326434 Bytes)Document6 pagesMétodo de Las Fuerzas para El Análisis de Sistemas (326434 Bytes)Hecthor HdezPas encore d'évaluation
- Unidad 6 Vibraciones MecanicasDocument7 pagesUnidad 6 Vibraciones MecanicasPeter Jimenez Martinez100% (1)
- 3.3.2 Cálculo Por El Método de Superposición.Document4 pages3.3.2 Cálculo Por El Método de Superposición.Nestor AltamiranoPas encore d'évaluation
- 2.3 Estequiometría de La Combustión: 2.4 La Primera Ley de La Termodinamica y La CombustionDocument3 pages2.3 Estequiometría de La Combustión: 2.4 La Primera Ley de La Termodinamica y La CombustionSergio ElizaldePas encore d'évaluation
- Investigacion Unidad 3Document23 pagesInvestigacion Unidad 3Leonel FernandezPas encore d'évaluation
- Estado de Esfuerzos Principales 1Document11 pagesEstado de Esfuerzos Principales 1Erik Quispe CruzPas encore d'évaluation
- Cinemática de La VibraciónDocument15 pagesCinemática de La VibraciónDaniel González Ortega100% (1)
- Nomenclatura, Clasificación y Arreglos Comunes de Los Mecanismos de Leva y SeguidorDocument11 pagesNomenclatura, Clasificación y Arreglos Comunes de Los Mecanismos de Leva y SeguidorEduardo Romo100% (1)
- Componentes y Funcionamiento Delos Sistemas Auxiliares de Los Motores de Combustion Interna Reciprocantes.Document12 pagesComponentes y Funcionamiento Delos Sistemas Auxiliares de Los Motores de Combustion Interna Reciprocantes.Fernando GarSa0% (1)
- Uso e Importancia de Las Maquinas de Fluidos IncompresiblesDocument3 pagesUso e Importancia de Las Maquinas de Fluidos IncompresiblesEduar Alejos Mendoza100% (1)
- Refrigeración Por Compresión de Vapor de Pasos MúltiplesDocument6 pagesRefrigeración Por Compresión de Vapor de Pasos MúltiplesAnderson TorresPas encore d'évaluation
- Teoría de Fallas, Concentración de Esfuerzos y FatigaDocument32 pagesTeoría de Fallas, Concentración de Esfuerzos y FatigaJacob Vazquez Carrillo100% (2)
- Elemento ResorteDocument2 pagesElemento ResorteElielPerezPas encore d'évaluation
- Apoyos RedundantesDocument8 pagesApoyos RedundantesGerardo ChahuaPas encore d'évaluation
- Transformación de Esfuerzo PlanoDocument5 pagesTransformación de Esfuerzo PlanoJorge Cruz Henry0% (1)
- Sistemas Sin AmortiguamientoDocument3 pagesSistemas Sin AmortiguamientoTomas MontesPas encore d'évaluation
- Movimiento de Varias Partículas PDFDocument2 pagesMovimiento de Varias Partículas PDFelkmaleonPas encore d'évaluation
- 4.1 Energia de DeformacionDocument11 pages4.1 Energia de DeformacionIvanPacheco50% (2)
- Resumen 1.6 Procedimiento para El Diseño de Un EjeDocument2 pagesResumen 1.6 Procedimiento para El Diseño de Un EjeLuis Angel Campos ValadezPas encore d'évaluation
- 1.4 Teoria de FallasDocument6 pages1.4 Teoria de FallasHermilo López MendozaPas encore d'évaluation
- 1.5 Uniones AtornilladasDocument8 pages1.5 Uniones AtornilladasJuan CanoPas encore d'évaluation
- Movimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoDocument11 pagesMovimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoAlan Ramirez RojasPas encore d'évaluation
- Oscilaciones y Ondas MecánicasDocument20 pagesOscilaciones y Ondas MecánicasKaren M Serrano TPas encore d'évaluation
- Capitulo 3 PDFDocument15 pagesCapitulo 3 PDFAlvaro Nicolas Bejarano Parada0% (1)
- Capitulo 3 PDFDocument15 pagesCapitulo 3 PDFAlvaro Nicolas Bejarano ParadaPas encore d'évaluation
- Carga ArmónicaDocument21 pagesCarga ArmónicaDeysi Becerra AlvitresPas encore d'évaluation
- Libro de Vibra - IngMarciano PDFDocument83 pagesLibro de Vibra - IngMarciano PDFDavid AcostaPas encore d'évaluation
- Uniones Soldadas y AtornilladasDocument18 pagesUniones Soldadas y AtornilladasDaniel González Ortega50% (2)
- Balanceo de RotoresDocument18 pagesBalanceo de RotoresDaniel González OrtegaPas encore d'évaluation
- Cinemática de La VibraciónDocument15 pagesCinemática de La VibraciónDaniel González Ortega100% (1)
- Simbologia ISADocument48 pagesSimbologia ISADaniel González OrtegaPas encore d'évaluation
- Manufactura CeramicosDocument18 pagesManufactura CeramicosDaniel González OrtegaPas encore d'évaluation
- Cardenal, Ernesto - Cantico Cosmico PDFDocument289 pagesCardenal, Ernesto - Cantico Cosmico PDFfloresran100% (1)
- Práctica 6 Caida LibreDocument5 pagesPráctica 6 Caida LibreVanesa OrdoñezPas encore d'évaluation
- CapacitoresDocument7 pagesCapacitoresMaria Alejandra Colon OsorioPas encore d'évaluation
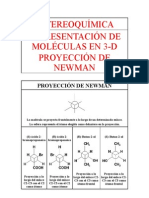
- EstereoquÍmicaDocument18 pagesEstereoquÍmicaanon-410997100% (2)
- Problemas de Fisica Dinamica y EstaticaDocument60 pagesProblemas de Fisica Dinamica y EstaticaMaria Del Mar Mendez0% (1)
- Ensayo de FlexiónDocument5 pagesEnsayo de FlexiónjuanPas encore d'évaluation
- Dinámica RotacionalDocument11 pagesDinámica RotacionalDiego MartinezPas encore d'évaluation
- Biografia de Albert EinsteinDocument16 pagesBiografia de Albert EinsteinharlynriveraPas encore d'évaluation
- Tubo en UDocument6 pagesTubo en Uidonotloveyou67% (3)
- Miraglia e 3Document253 pagesMiraglia e 3Nacho PeritoPas encore d'évaluation
- Códigos de Error Lavadoras - LavarropasDocument54 pagesCódigos de Error Lavadoras - LavarropasPpr0% (1)
- AGUJEROS NEGROS InvestigacionDocument6 pagesAGUJEROS NEGROS Investigacionsantiago emmanuel juarezPas encore d'évaluation
- Las Inductancias o BobinasDocument8 pagesLas Inductancias o BobinasEdixson SantelizPas encore d'évaluation
- Coordenadas GeograficasDocument9 pagesCoordenadas Geograficasrodrigo0% (1)
- Huella de CarbonoDocument9 pagesHuella de CarbonoSInamiPas encore d'évaluation
- Desempeno 3 Guia 2Document4 pagesDesempeno 3 Guia 2jano0% (2)
- PRACT9Document6 pagesPRACT9Juls FloresPas encore d'évaluation
- ENVOLTURA ATÓMICA IIF 2023 - ResoluciónDocument6 pagesENVOLTURA ATÓMICA IIF 2023 - ResoluciónÁlvaro Cáceres CáceresPas encore d'évaluation
- Ejercicios Propuestos N 02Document9 pagesEjercicios Propuestos N 02Melanie ChavezPas encore d'évaluation
- William Rowan HamiltonDocument16 pagesWilliam Rowan HamiltonIsmael PinedaPas encore d'évaluation
- Https WWW - Ingenieriaparatodos.com 2018 01 Partes-Un-Horno-Microondas - HTMLDocument1 pageHttps WWW - Ingenieriaparatodos.com 2018 01 Partes-Un-Horno-Microondas - HTMLSilvia Lepez MurgoPas encore d'évaluation
- Catalogo Deformacion de MaterialDocument72 pagesCatalogo Deformacion de MaterialDaniel SolerPas encore d'évaluation
- Ejercicios2 Propedeútico Electromagnetismo IIDocument2 pagesEjercicios2 Propedeútico Electromagnetismo IIMarco Rodríguez GarcíaPas encore d'évaluation
- Ejercicio 2 CienciasDocument24 pagesEjercicio 2 CienciasJhonatan Franco100% (2)
- Informe Q 7Document5 pagesInforme Q 7mayumiPas encore d'évaluation
- Circuito Regenerativo Proyecto 11Document11 pagesCircuito Regenerativo Proyecto 11Lubrication´s Room100% (1)
- Antecedentes Históricos Del Enlace QuímicoDocument5 pagesAntecedentes Históricos Del Enlace QuímicoManuel CamposPas encore d'évaluation
- Pavimentos de Arena-Asfalto en FríoDocument27 pagesPavimentos de Arena-Asfalto en FríoIvan Dario Betancourt ChaparroPas encore d'évaluation
- Transferencia de Calor Guia 2Document14 pagesTransferencia de Calor Guia 2Jesus RojasPas encore d'évaluation
- Materiales No Elásticos YesoDocument4 pagesMateriales No Elásticos YesoAho OMPas encore d'évaluation