Vous aimerez peut-être aussi
- Electronics Practicals 2 (Ibrahim, 2015)Document444 pagesElectronics Practicals 2 (Ibrahim, 2015)Titi TDPas encore d'évaluation
- Identification of Torsional Vibration Features in Electrical Powered Rotating EquipmentDocument9 pagesIdentification of Torsional Vibration Features in Electrical Powered Rotating EquipmentHasan PashaPas encore d'évaluation
- Motor Protection Calculation Tool For SPAM 150 C: User S Manual and Technical DescriptionDocument28 pagesMotor Protection Calculation Tool For SPAM 150 C: User S Manual and Technical Descriptionhizbi7Pas encore d'évaluation
- A123 PRODUCT SPEC FOR 8ah LFP CELLDocument9 pagesA123 PRODUCT SPEC FOR 8ah LFP CELLnishant_dreamviewerPas encore d'évaluation
- Commissioning Manual - FinalDocument161 pagesCommissioning Manual - FinalRagab Tolba100% (1)
- Modal Analysis and Condition MonitoringDocument5 pagesModal Analysis and Condition Monitoringbidyutkr30100% (2)
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocument6 pagesComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Pas encore d'évaluation
- Developing EV Charging Stations in VietnamDocument28 pagesDeveloping EV Charging Stations in VietnamQuang Linh Lê100% (1)
- Bus Bar SchemesDocument26 pagesBus Bar SchemesSoorya Priya GopalakrishnaPas encore d'évaluation
- Neural NetworksDocument114 pagesNeural Networksrian ngganden100% (2)
- Buchholz Relay Guide for Gas & Oil Operated Protective DevicesDocument4 pagesBuchholz Relay Guide for Gas & Oil Operated Protective DevicesMonish Nawal100% (1)
- Finalpaper 135Document6 pagesFinalpaper 135vinaynitw257Pas encore d'évaluation
- Jeas 0408 94Document7 pagesJeas 0408 94Jun Chee LimPas encore d'évaluation
- Application of Space Vector Modulation in Direct Torque Control of PMSMDocument4 pagesApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilPas encore d'évaluation
- Rotor Position Sensor Fault Detection Isolation and Reconfiguration of A Doubly Fed Induction Machine ControlDocument10 pagesRotor Position Sensor Fault Detection Isolation and Reconfiguration of A Doubly Fed Induction Machine Controlabdeldjabbar14Pas encore d'évaluation
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiPas encore d'évaluation
- Sensorless PMSM Control Using Luenberger ObserverDocument5 pagesSensorless PMSM Control Using Luenberger ObserverSandeep RaiPas encore d'évaluation
- New DTC WRKDocument8 pagesNew DTC WRKNAENWI YAABARIPas encore d'évaluation
- Combining The Principles of Variable Structure, Direct Torque Control, and Space Vector Modulation For Induction Motor Fed by Matrix ConverterDocument7 pagesCombining The Principles of Variable Structure, Direct Torque Control, and Space Vector Modulation For Induction Motor Fed by Matrix ConverterGacem AminaPas encore d'évaluation
- Generator Load Angle MeasurementDocument8 pagesGenerator Load Angle MeasurementFahim Faruqui100% (1)
- Direct Torque Control Using Space Vector Modulation and Dynamic Performance of The Drive, Via A Fuzzy Logic Controller For Speed RegulationDocument10 pagesDirect Torque Control Using Space Vector Modulation and Dynamic Performance of The Drive, Via A Fuzzy Logic Controller For Speed RegulationAnimesh NayakPas encore d'évaluation
- Torque Sensors: Common Sensing MethodsDocument32 pagesTorque Sensors: Common Sensing MethodsvishiwizardPas encore d'évaluation
- System1 Plots - Machinery-Diagnostic - Part1Document16 pagesSystem1 Plots - Machinery-Diagnostic - Part1Thyagaraju PalisettyPas encore d'évaluation
- A Sensorless Robust Vector Control of Induction Motor DrivesDocument6 pagesA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarPas encore d'évaluation
- Gear Fault Detection Using The Geometric Properties of Electrical Currents in Three-Phase Induction Motor-Based SystemsDocument12 pagesGear Fault Detection Using The Geometric Properties of Electrical Currents in Three-Phase Induction Motor-Based SystemsydydPas encore d'évaluation
- Speed Control of PMSM by Using DSVM - DTC TechniqueDocument5 pagesSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraPas encore d'évaluation
- Dynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesDocument5 pagesDynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesRaspy ReddyPas encore d'évaluation
- Active Disturbance Rejection Control of A MEMS GyroscopeDocument5 pagesActive Disturbance Rejection Control of A MEMS GyroscopekazimPas encore d'évaluation
- Sensorless Control of PMSM Motors Using Novel Estimation MethodsDocument25 pagesSensorless Control of PMSM Motors Using Novel Estimation MethodsSteve DemirelPas encore d'évaluation
- Extracting sensitive indicators for early fault diagnosis in rotating machineryDocument15 pagesExtracting sensitive indicators for early fault diagnosis in rotating machineryDjelloul DjelloulPas encore d'évaluation
- Multi-Motor DrivesDocument6 pagesMulti-Motor DrivessriabolfazlPas encore d'évaluation
- Speed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerDocument6 pagesSpeed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerVijay KumarPas encore d'évaluation
- 4.3 ServomechanismsDocument65 pages4.3 ServomechanismsYousef Asmar100% (1)
- 30th Annual IEEE Conference on Industrial ElectronicsDocument6 pages30th Annual IEEE Conference on Industrial Electronicsdjoo77Pas encore d'évaluation
- Synchro Appl GuideDocument5 pagesSynchro Appl GuideAlexandre Anderson AlvesPas encore d'évaluation
- 10 - Chapter 3Document29 pages10 - Chapter 3SriramPas encore d'évaluation
- InTech-Speed Sensorless Control of Motor For Railway VehiclesDocument25 pagesInTech-Speed Sensorless Control of Motor For Railway VehiclesdimitaringPas encore d'évaluation
- System Level Simulation of Servo Accelerometer in SimulinkDocument8 pagesSystem Level Simulation of Servo Accelerometer in Simulinkohpigha6048Pas encore d'évaluation
- 165-Article Text-732-1-10-20110321Document4 pages165-Article Text-732-1-10-20110321Cody BargholzPas encore d'évaluation
- Simulation and Analysis of Modified DTC of PMSMDocument10 pagesSimulation and Analysis of Modified DTC of PMSMpreetivermaeeePas encore d'évaluation
- Linköping University Post PrintDocument9 pagesLinköping University Post PrintGopal AthaniPas encore d'évaluation
- Minimizing Torque Ripple in DTC of Induction Motors Using Fuzzy Duty Cycle ControlDocument8 pagesMinimizing Torque Ripple in DTC of Induction Motors Using Fuzzy Duty Cycle ControlSanker VikramPas encore d'évaluation
- 03 2008 JA PS A 1 008 CleanDocument6 pages03 2008 JA PS A 1 008 CleanBentarfa IslamPas encore d'évaluation
- Solid State Drives Short BookDocument25 pagesSolid State Drives Short BookGomathi Raja MPas encore d'évaluation
- Objective QuestionsDocument15 pagesObjective QuestionsAyyappa JavangulaPas encore d'évaluation
- Microcontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protection PDFDocument7 pagesMicrocontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protection PDFarsalanhamidPas encore d'évaluation
- Technologies 08 00011 v2 PDFDocument11 pagesTechnologies 08 00011 v2 PDFroro silalaPas encore d'évaluation
- Sensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed EstimatorDocument9 pagesSensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed Estimatormechernene_aek9037Pas encore d'évaluation
- Wind Turbine Doubly-Fed Induction Generator Defects Diagnosis Under Voltage DipsDocument13 pagesWind Turbine Doubly-Fed Induction Generator Defects Diagnosis Under Voltage DipsTELKOMNIKAPas encore d'évaluation
- Rapport InductosynDocument13 pagesRapport InductosynHemant SavlaPas encore d'évaluation
- Load AngleDocument8 pagesLoad Anglejosette100% (1)
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicPas encore d'évaluation
- Interpolation Technique For Encoder Resolution Improvement in Permanent Magnet Synchronous Motor Drives PDFDocument6 pagesInterpolation Technique For Encoder Resolution Improvement in Permanent Magnet Synchronous Motor Drives PDFarenasjaPas encore d'évaluation
- Comparison of Different FE Calculation Methods For The Electromagnetic Torque of PM MachinesDocument8 pagesComparison of Different FE Calculation Methods For The Electromagnetic Torque of PM Machinesmlkz_01Pas encore d'évaluation
- A Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueDocument8 pagesA Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueAkash VermaPas encore d'évaluation
- Synchros and ResolversDocument29 pagesSynchros and ResolversjennybunnyomgPas encore d'évaluation
- Direct Torque Control of Inverter Fed PMSM Drive Using SVMDocument7 pagesDirect Torque Control of Inverter Fed PMSM Drive Using SVMInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Coopertitchener Trifilar1Document30 pagesCoopertitchener Trifilar1api-24490620450% (2)
- 3.2 Sensors and TransducersDocument38 pages3.2 Sensors and Transducersjohanna shaanyenengePas encore d'évaluation
- Compensation of Friction and Backlash Effects in An Electrical Actuator by MerzoukiDocument10 pagesCompensation of Friction and Backlash Effects in An Electrical Actuator by MerzoukijacobwatsonPas encore d'évaluation
- Synchro Application Guide: TransmitterDocument9 pagesSynchro Application Guide: TransmitterLeviatan McbluePas encore d'évaluation
- SYNCHROS AND RESOLVERS GUIDEDocument29 pagesSYNCHROS AND RESOLVERS GUIDEjennybunnyomgPas encore d'évaluation
- Jia 2012Document6 pagesJia 2012Anonymous hDJIZwEuoPas encore d'évaluation
- An Optimal Balancing Structure For Small and Medium Electrical Machine RotorsDocument9 pagesAn Optimal Balancing Structure For Small and Medium Electrical Machine Rotorsikram09568519Pas encore d'évaluation
- Microcontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault ProtectionDocument7 pagesMicrocontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protectiondebasishmee5808Pas encore d'évaluation
- FD-HG8221C GPON ONU 1GE+1FE+CATV+WiFi+POT Spec SheetDocument9 pagesFD-HG8221C GPON ONU 1GE+1FE+CATV+WiFi+POT Spec SheetEric KerrPas encore d'évaluation
- Tejas Brochure Flexible Gpon Ont14b EuropeDocument2 pagesTejas Brochure Flexible Gpon Ont14b EuropeEric KerrPas encore d'évaluation
- The KingDocument1 pageThe KingEric KerrPas encore d'évaluation
- DS1820 1-Wire Digital ThermometerDocument27 pagesDS1820 1-Wire Digital ThermometerIsaias Ortiz ReyesPas encore d'évaluation
- Huawei HG8245H5Document2 pagesHuawei HG8245H5Eric KerrPas encore d'évaluation
- Solution ToYegnRame2001Document107 pagesSolution ToYegnRame2001Mahesh GondiPas encore d'évaluation
- Resume of Mechatronics Engineer with Experience in PC Maintenance and Control SystemsDocument1 pageResume of Mechatronics Engineer with Experience in PC Maintenance and Control SystemsEric KerrPas encore d'évaluation
- OLT ConfigurationDocument3 pagesOLT ConfigurationEric KerrPas encore d'évaluation
- UntitledDocument1 pageUntitledEric KerrPas encore d'évaluation
- MechatronDocument1 pageMechatronEric KerrPas encore d'évaluation
- Stirling CycleDocument4 pagesStirling CycleEric KerrPas encore d'évaluation
- Technological Development of Stirling Cycle EnginesDocument38 pagesTechnological Development of Stirling Cycle EnginesDuy TùngPas encore d'évaluation
- DH RepresentationDocument42 pagesDH RepresentationSaravanan SPas encore d'évaluation
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDocument44 pagesIntroduction To ROBOTICS: Kinematics of Robot ManipulatorEric KerrPas encore d'évaluation
- L4 - Forward Kinematics 1 V1Document76 pagesL4 - Forward Kinematics 1 V1zul_fadhli_1988Pas encore d'évaluation
- Energy Methods: MAE 314 - Solid Mechanics Y. ZhuDocument15 pagesEnergy Methods: MAE 314 - Solid Mechanics Y. ZhufabukePas encore d'évaluation
- Denavit-Hartenberg convention robot kinematicsDocument17 pagesDenavit-Hartenberg convention robot kinematicsHarris ChackoPas encore d'évaluation
- Work Energy Methods W PDFDocument17 pagesWork Energy Methods W PDFvsanthanamPas encore d'évaluation
- Work Energy Methods W PDFDocument17 pagesWork Energy Methods W PDFvsanthanamPas encore d'évaluation
- Understanding DSB-LC AM ModulationDocument23 pagesUnderstanding DSB-LC AM ModulationEric KerrPas encore d'évaluation
- Programming CNC MachineDocument31 pagesProgramming CNC MachineEric KerrPas encore d'évaluation
- Theory of The Finite Element MethodDocument15 pagesTheory of The Finite Element MethodEric KerrPas encore d'évaluation
- Rayleigh RitzDocument23 pagesRayleigh Ritzjmam1992Pas encore d'évaluation
- Rayleigh RitzDocument23 pagesRayleigh Ritzjmam1992Pas encore d'évaluation
- Theory of The Finite Element MethodDocument15 pagesTheory of The Finite Element MethodEric KerrPas encore d'évaluation
- Chapter9 5-6Document11 pagesChapter9 5-6Arut MVPas encore d'évaluation
- 56 5 CHRDocument277 pages56 5 CHREric KerrPas encore d'évaluation
- SD Card Temp Logger Arduino CodeDocument5 pagesSD Card Temp Logger Arduino CodeEric KerrPas encore d'évaluation
- Stirling CycleDocument4 pagesStirling CycleEric KerrPas encore d'évaluation
- Small-Size Coupled-Fed Printed Pifa For Internal Eight-Band Lte/ Gsm/Umts Mobile Phone AntennaDocument6 pagesSmall-Size Coupled-Fed Printed Pifa For Internal Eight-Band Lte/ Gsm/Umts Mobile Phone AntennaShruthi MeshaPas encore d'évaluation
- K-LB-1.30 SPDDocument3 pagesK-LB-1.30 SPDAndy Kong KingPas encore d'évaluation
- Permanent Magnet DC Motor With Planetary Gearhead PerformaxDocument5 pagesPermanent Magnet DC Motor With Planetary Gearhead PerformaxMario Arturo RendonPas encore d'évaluation
- Seeb Vocational College Diploma CourceDocument2 pagesSeeb Vocational College Diploma CourceSiva Agora KarthikeyanPas encore d'évaluation
- L010228 - BLY17 Series Product SheetDocument3 pagesL010228 - BLY17 Series Product SheetnikanikolinaPas encore d'évaluation
- Designs For Generating The Jeff Cook Effect: Dimension LaboratoriesDocument7 pagesDesigns For Generating The Jeff Cook Effect: Dimension LaboratoriesBilisuma ZewduPas encore d'évaluation
- Light: Content Practice ADocument3 pagesLight: Content Practice ALegend btdPas encore d'évaluation
- Semiconductors Notes PDFDocument20 pagesSemiconductors Notes PDFVishalPas encore d'évaluation
- Data Sheet: Oxygen-Free Copper Cu-OF - Luvata Alloy OF-OKDocument2 pagesData Sheet: Oxygen-Free Copper Cu-OF - Luvata Alloy OF-OKMuhammad Asif IqbalPas encore d'évaluation
- NJYW1 Floatless Relay Technical OverviewDocument2 pagesNJYW1 Floatless Relay Technical OverviewPrince NeroPas encore d'évaluation
- Quick Start PF70Document18 pagesQuick Start PF70selvan_rsk761Pas encore d'évaluation
- Tugas Nilai Kalori Print WoDocument132 pagesTugas Nilai Kalori Print Wodedi sanatraPas encore d'évaluation
- Orient-Catalogue For Porcelain Pin Type InsulatorsDocument4 pagesOrient-Catalogue For Porcelain Pin Type InsulatorsSatish MalviyaPas encore d'évaluation
- Mehebub ElectromagnetismDocument29 pagesMehebub ElectromagnetismMehebub PhysicsPas encore d'évaluation
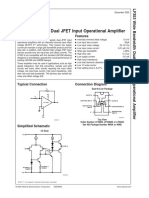
- Datasheet LF 353Document14 pagesDatasheet LF 353Anggridho MeilandanuPas encore d'évaluation
- Design Calculation of A Solar Power System For PTP Microwave Link SubscriberDocument11 pagesDesign Calculation of A Solar Power System For PTP Microwave Link Subscriberشـخـ صـﮱ اسـطورﮱPas encore d'évaluation
- Experiment Title: Measurement of Temperature Using Different Thermal Sensors/transducersDocument14 pagesExperiment Title: Measurement of Temperature Using Different Thermal Sensors/transducersZobaeir Akanda RatulPas encore d'évaluation
- Circuit Note: Fully Automatic High Performance Conductivity Measurement SystemDocument10 pagesCircuit Note: Fully Automatic High Performance Conductivity Measurement SystemSupolPas encore d'évaluation
- ps100 User Manual en - v7Document70 pagesps100 User Manual en - v7diogo_airjPas encore d'évaluation
- Ericsson Minilink TN R4Document15 pagesEricsson Minilink TN R4Ebenezer AnnanPas encore d'évaluation
- CELL-TO-MODULE LOSS SIMULATION FOR SHINGLED-CELL CONCEPTDocument5 pagesCELL-TO-MODULE LOSS SIMULATION FOR SHINGLED-CELL CONCEPTShrikanth SolaPas encore d'évaluation
- LG 55LA7900 CH LA34D PDFDocument129 pagesLG 55LA7900 CH LA34D PDFodilonsouzaPas encore d'évaluation
- Max8770gtl 1178390Document48 pagesMax8770gtl 1178390ruben riveraPas encore d'évaluation