Vous aimerez peut-être aussi
- Flexible Jumper Design PremiseDocument12 pagesFlexible Jumper Design PremiseAgus BudionoPas encore d'évaluation
- Lazy AssignmentDocument5 pagesLazy Assignmentthefoot39Pas encore d'évaluation
- (ANSYS AQWA) Study On Mooring System Design of Floating Offshore Wind Turbine in Jeju Offshore AreaDocument9 pages(ANSYS AQWA) Study On Mooring System Design of Floating Offshore Wind Turbine in Jeju Offshore AreaychodnekerPas encore d'évaluation
- Technical Paper - Modelling Suction Pile Lowering Through The SplashzoneDocument9 pagesTechnical Paper - Modelling Suction Pile Lowering Through The Splashzonecxb07164Pas encore d'évaluation
- Installation of Steel and Flexible Pipelines in Sideway CurrentDocument144 pagesInstallation of Steel and Flexible Pipelines in Sideway CurrentJohari A. KasimPas encore d'évaluation
- Microsoft Word - PRELIMINARY MOORING ANALISYS DSV TS504Document48 pagesMicrosoft Word - PRELIMINARY MOORING ANALISYS DSV TS504halimPas encore d'évaluation
- 4subsea - PSA-Norway - Flexibles-Rev5 - Un-Bonded Flexible Risers - Recent Field Experience and Actions For Increased RobustnessDocument78 pages4subsea - PSA-Norway - Flexibles-Rev5 - Un-Bonded Flexible Risers - Recent Field Experience and Actions For Increased RobustnessyuniariwibowoPas encore d'évaluation
- MWA ReportDocument75 pagesMWA ReportCyrus HongPas encore d'évaluation
- Offshore Pipeline Design, Analys and Methods PDFDocument199 pagesOffshore Pipeline Design, Analys and Methods PDFddaalayamoct313024Pas encore d'évaluation
- Steel Catenary RisersDocument29 pagesSteel Catenary RisersZadeh NormanPas encore d'évaluation
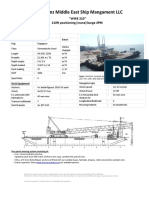
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathPas encore d'évaluation
- OrcaFlex Training in ChennaiDocument7 pagesOrcaFlex Training in ChennaipradewoPas encore d'évaluation
- Training MetoceanDocument68 pagesTraining MetoceanChiedu Okondu100% (3)
- OrcaFlex Demonstration IIT MadrasDocument11 pagesOrcaFlex Demonstration IIT MadrasvigambetkarPas encore d'évaluation
- Deepwater Riser Design Study ReportDocument98 pagesDeepwater Riser Design Study ReportStephen McCannPas encore d'évaluation
- OMAE2012 84121 PresentationDocument16 pagesOMAE2012 84121 PresentationsojanvasudevanPas encore d'évaluation
- Structural Integrity Assessment of Offshore Conversions - ISE and TSADocument21 pagesStructural Integrity Assessment of Offshore Conversions - ISE and TSAAnonymous100% (2)
- Design by AnsysDocument103 pagesDesign by AnsysHoang Tien DungPas encore d'évaluation
- Structural Design and Cost Factors in Submersible Vehicle DevelopmentDocument49 pagesStructural Design and Cost Factors in Submersible Vehicle DevelopmentMuhammad Rafi SiratPas encore d'évaluation
- Master Thesis 2010-Review and Verification of Marine Riser Analysis ProgramsDocument113 pagesMaster Thesis 2010-Review and Verification of Marine Riser Analysis Programsmghu70Pas encore d'évaluation
- 8 9-Approach To The Noninear Soil Model For OrcaFlex - Y.T.KimDocument20 pages8 9-Approach To The Noninear Soil Model For OrcaFlex - Y.T.KimYoungtae KimPas encore d'évaluation
- Analysis of offshore jacket platform responsesDocument8 pagesAnalysis of offshore jacket platform responsesrobert.johns1028Pas encore d'évaluation
- 1.1 General Scope of Work and Instructions To Bidders Etame-100 Offshore InstallationDocument112 pages1.1 General Scope of Work and Instructions To Bidders Etame-100 Offshore InstallationWilliam O OkolotuPas encore d'évaluation
- OrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Document19 pagesOrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Abam Joshua100% (1)
- Orca Flex 1Document376 pagesOrca Flex 1autienhaiPas encore d'évaluation
- Flaws S NDocument23 pagesFlaws S Nadiraju07Pas encore d'évaluation
- Export SCR Riser Analysis Report - Kim Young TaeDocument30 pagesExport SCR Riser Analysis Report - Kim Young TaeYoungtae Kim100% (1)
- Aqwa LineDocument153 pagesAqwa LineEl riza annaml100% (1)
- Concrete Mattresses FlysheetDocument3 pagesConcrete Mattresses FlysheetDave M MichaelPas encore d'évaluation
- Thesis Report EAF Pigeaud PS Platform DesignDocument142 pagesThesis Report EAF Pigeaud PS Platform DesignPrathamesh OmtechPas encore d'évaluation
- FEA Buckling AnalysisDocument10 pagesFEA Buckling AnalysisalexrodriguezabcPas encore d'évaluation
- Simple Stability MosesDocument11 pagesSimple Stability Mosesikhwanul_muslimPas encore d'évaluation
- OrcaFlex For PipelayDocument4 pagesOrcaFlex For PipelaySandeep RangapurePas encore d'évaluation
- 6 - Soil Data in Orcaflex-Y.T.kimDocument9 pages6 - Soil Data in Orcaflex-Y.T.kimYoungtae KimPas encore d'évaluation
- Mooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PDocument12 pagesMooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PaaPas encore d'évaluation
- A Study On Engineering Critical Assessment of Subsea Pipeline Girth Welds For Reeling Instalation PDFDocument210 pagesA Study On Engineering Critical Assessment of Subsea Pipeline Girth Welds For Reeling Instalation PDFAllan DiasPas encore d'évaluation
- FragmDocument51 pagesFragmAnonymous Ub9nEDlPas encore d'évaluation
- EN8000 Aqwa Tutorial: Aqwa-Line Aqwa-Fer Aqwa-Librium Aqwa-Drift Aqwa-NautDocument13 pagesEN8000 Aqwa Tutorial: Aqwa-Line Aqwa-Fer Aqwa-Librium Aqwa-Drift Aqwa-NautDani GarciaPas encore d'évaluation
- Project Brief For OrcaflexDocument4 pagesProject Brief For OrcaflexyogacruisePas encore d'évaluation
- Installation of Anchors For Mooring System of Floating Wind TurbinesDocument134 pagesInstallation of Anchors For Mooring System of Floating Wind Turbines정재영100% (1)
- Vessel Motions and Mooring Line Tensions in Very Shallow WaterDocument91 pagesVessel Motions and Mooring Line Tensions in Very Shallow WaterPatrick SilvaPas encore d'évaluation
- Analyzing Static and Dynamic Lifting Process of Topside PlatformDocument63 pagesAnalyzing Static and Dynamic Lifting Process of Topside Platformpriyanka pertiwiPas encore d'évaluation
- OMAE2008-57082: A New Wind and Wave Atlas of The Hellenic SeasDocument9 pagesOMAE2008-57082: A New Wind and Wave Atlas of The Hellenic SeaspanPas encore d'évaluation
- Practical Design of Control SurfaceDocument40 pagesPractical Design of Control SurfaceRyder SahithPas encore d'évaluation
- Bonga Pipe in Pipe LayDocument66 pagesBonga Pipe in Pipe LayWilliam O OkolotuPas encore d'évaluation
- Aqwa Tether Manual PDFDocument178 pagesAqwa Tether Manual PDFHari SreenivasanPas encore d'évaluation
- ABS Fatigue Life Assessment 2014Document1 pageABS Fatigue Life Assessment 2014Fandy SipataPas encore d'évaluation
- 0029 - ND Rev - 0 22-Jun-13 Guidelines For Submarine Pipeline InstallationDocument54 pages0029 - ND Rev - 0 22-Jun-13 Guidelines For Submarine Pipeline InstallationGiray Çıvak100% (1)
- SHEAR7 Version4.4 2005 TheoryManual ADocument43 pagesSHEAR7 Version4.4 2005 TheoryManual Auktaindra50% (2)
- Offshore WInd Energy - Indian PerspectiveDocument55 pagesOffshore WInd Energy - Indian PerspectiveAmanat Ali AnsariPas encore d'évaluation
- 4 Rum2013 Saipem Palazzetti PDFDocument35 pages4 Rum2013 Saipem Palazzetti PDFGuomin JiPas encore d'évaluation
- REE Panning Ipelines: R P DNV-RP-F105Document39 pagesREE Panning Ipelines: R P DNV-RP-F105Paula CamargosPas encore d'évaluation
- Fatigue Methods PDFDocument91 pagesFatigue Methods PDFGodwin100% (1)
- SHELL - Provision of FPSO Integrity and Specialized Pipeline Inspection and Maintenance Services On Bonga - 20221002Document4 pagesSHELL - Provision of FPSO Integrity and Specialized Pipeline Inspection and Maintenance Services On Bonga - 20221002Wale OyeludePas encore d'évaluation
- Mooring Installation and AnalysisDocument1 pageMooring Installation and AnalysisKim OanhPas encore d'évaluation
- Splash Zone Lifting Analysis of Subsea StructuresDocument11 pagesSplash Zone Lifting Analysis of Subsea StructuresAnonymous PibYPghPas encore d'évaluation
- Wave LoadingDocument10 pagesWave Loadingmyusuf_engineerPas encore d'évaluation
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityD'EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityPas encore d'évaluation
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsD'EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsPas encore d'évaluation
- Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsD'EverandNumerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsPas encore d'évaluation
- VC - AutocityDocument27 pagesVC - AutocityMinTzHoPas encore d'évaluation
- Offshore StructuresDocument189 pagesOffshore StructuresMinTzHoPas encore d'évaluation
- Design of STPDocument21 pagesDesign of STPMinTzHoPas encore d'évaluation
- Guide to Steel EmbedmentsDocument14 pagesGuide to Steel Embedmentsvinku90% (1)
- The Role of PM in The Career Growth of EngineersDocument4 pagesThe Role of PM in The Career Growth of EngineersLim KaixianPas encore d'évaluation
- Design of StructureDocument33 pagesDesign of StructureMinTzHoPas encore d'évaluation
- Column Design BS8110Document7 pagesColumn Design BS8110MinTzHo0% (1)
- Pipeline Design PDFDocument437 pagesPipeline Design PDFgilbertotiburcio100% (2)
- Water Hyacinth and Biogas ProductionDocument8 pagesWater Hyacinth and Biogas ProductiongiulioPas encore d'évaluation
- Fluid Flow FundamentalsDocument27 pagesFluid Flow FundamentalsUri BabaPas encore d'évaluation
- Characteristics of ExplosivesDocument4 pagesCharacteristics of ExplosivesMerced Baneza Cahuana100% (1)
- Analysis System: SteamDocument22 pagesAnalysis System: SteamGaurav KumarPas encore d'évaluation
- Ammonia Plant Selection, Sizing and Troubleshooting, Kolmetz Handbook of Process Equipment DesignDocument24 pagesAmmonia Plant Selection, Sizing and Troubleshooting, Kolmetz Handbook of Process Equipment DesignHelena AdamPas encore d'évaluation
- Andorra's Energy Profile and Progress Towards Sustainable Development GoalsDocument4 pagesAndorra's Energy Profile and Progress Towards Sustainable Development GoalsBrian ChangPas encore d'évaluation
- Philippine Energy Plan 101: Asst. Dir. Carmencita A. BarisoDocument30 pagesPhilippine Energy Plan 101: Asst. Dir. Carmencita A. BarisoDominic SantiagoPas encore d'évaluation
- Reading Comprehension Exercise Subjects: Geography & English Sources of Renewable Energy"Document4 pagesReading Comprehension Exercise Subjects: Geography & English Sources of Renewable Energy"etwinningPas encore d'évaluation
- Industrial Waste ManagementDocument2 pagesIndustrial Waste ManagementUmma SabiraPas encore d'évaluation
- CHP Presentation Cat Gas and Diesel Generator Sets Performance Cost and Application DifferencesDocument77 pagesCHP Presentation Cat Gas and Diesel Generator Sets Performance Cost and Application DifferencesripalPas encore d'évaluation
- Non-Renewable Energy Resources v2.0Document33 pagesNon-Renewable Energy Resources v2.0Nauman QureshyPas encore d'évaluation
- Psychrometrics Fundamentals and Moist Air PropertiesDocument31 pagesPsychrometrics Fundamentals and Moist Air PropertiesBukhory TajudinPas encore d'évaluation
- Dahej Sir Presentation PDFDocument26 pagesDahej Sir Presentation PDFMaulik Yogesh ThakkarPas encore d'évaluation
- 9.3 Burner DS KG98-2-ONT-OMF-ME-HOTH-VD-081 - Rev.1 - CODE-1 (02.04.2021)Document7 pages9.3 Burner DS KG98-2-ONT-OMF-ME-HOTH-VD-081 - Rev.1 - CODE-1 (02.04.2021)Prabha KaranPas encore d'évaluation
- 2017 Directory of China's Natural Gas Pipelines PDFDocument12 pages2017 Directory of China's Natural Gas Pipelines PDFarapublicationPas encore d'évaluation
- Index - 2017 - Practical Onshore Gas Field EngineeringDocument22 pagesIndex - 2017 - Practical Onshore Gas Field EngineeringKirunda AndrewPas encore d'évaluation
- HydrotreatingPoster PDFDocument1 pageHydrotreatingPoster PDFekosmind100% (2)
- KARTE 02.b Prime Mover (Turbine & Engine)Document63 pagesKARTE 02.b Prime Mover (Turbine & Engine)TusenkrishPas encore d'évaluation
- Group Assignment Q1Document2 pagesGroup Assignment Q1Muhdhadi SajariPas encore d'évaluation
- Literature Review On Fuel Subsidy RemovalDocument7 pagesLiterature Review On Fuel Subsidy Removalafmabbpoksbfdp100% (1)
- Introduction to Casing Design CriteriaDocument12 pagesIntroduction to Casing Design CriteriaVñ ÕãdPas encore d'évaluation
- DIRECTIONS: Answer The Following Questions ProperlyDocument2 pagesDIRECTIONS: Answer The Following Questions ProperlyRacid Dollolasa ReyesPas encore d'évaluation
- Perm Select Silicone MembranesDocument4 pagesPerm Select Silicone MembranesVenkata Krishnan RamanujamPas encore d'évaluation
- OM&S-R - UpdatedDocument229 pagesOM&S-R - UpdatedTITU V100% (2)
- Making of PROM PDFDocument5 pagesMaking of PROM PDFAli BhanguPas encore d'évaluation
- B2 VOCABULARY - EnvironmentDocument7 pagesB2 VOCABULARY - Environmentdavid panadesPas encore d'évaluation
- As 1038.14.1-2003 Coal and Coke - Analysis and Testing Higher Rank Coal Ash and Coke Ash - Major and Minor ElDocument7 pagesAs 1038.14.1-2003 Coal and Coke - Analysis and Testing Higher Rank Coal Ash and Coke Ash - Major and Minor ElSAI Global - APACPas encore d'évaluation
- Oil RefiningDocument216 pagesOil RefiningPrabavathi PappuPas encore d'évaluation
- LMV 803Lr Data Sheet US FinalDocument2 pagesLMV 803Lr Data Sheet US Finaljamil ahmedPas encore d'évaluation