Vous aimerez peut-être aussi
- Voltage Stability of Electric Power Systems PDFDocument375 pagesVoltage Stability of Electric Power Systems PDFdinhqui73% (11)
- Applied Mechanics SopDocument2 pagesApplied Mechanics Sopneerajmohanvp100% (3)
- LEMP-synchronous Electric MotorsDocument65 pagesLEMP-synchronous Electric MotorsadnanhusikaPas encore d'évaluation
- Vacuum Brake ReportDocument65 pagesVacuum Brake ReportsasikumarPas encore d'évaluation
- 98r06 PDFDocument75 pages98r06 PDFElias GabrielPas encore d'évaluation
- Variable Speed Drive For Converter Fed Synchronous Machine - PCS 8000 Variable-Speed Converter - (Converters For Pumped Storage Plants - ) - ABBDocument3 pagesVariable Speed Drive For Converter Fed Synchronous Machine - PCS 8000 Variable-Speed Converter - (Converters For Pumped Storage Plants - ) - ABBDeepak GehlotPas encore d'évaluation
- Appl 17 Protection of Three Winding Transformer enDocument10 pagesAppl 17 Protection of Three Winding Transformer enSristi MitraPas encore d'évaluation
- Catalogo 13 Eng - Nuovo Needle ValvesDocument8 pagesCatalogo 13 Eng - Nuovo Needle ValvesDheeraj ThakurPas encore d'évaluation
- Abb SKDocument27 pagesAbb SKtonPas encore d'évaluation
- EvaPower For HydropowerDocument15 pagesEvaPower For HydropowerTamboli EnergiPas encore d'évaluation
- 22kv Simosec EngDocument44 pages22kv Simosec Engmimran18Pas encore d'évaluation
- 10.1007@978 3 030 37618 5 PDFDocument543 pages10.1007@978 3 030 37618 5 PDFRafael TrujilloPas encore d'évaluation
- ABB 1HDX580101en ELK04Document32 pagesABB 1HDX580101en ELK04gejiro73100% (1)
- Calculation of Flow Duration CurveDocument7 pagesCalculation of Flow Duration Curvepushkar078Pas encore d'évaluation
- PSH FAST Commissioning Technical Report ORNLDocument101 pagesPSH FAST Commissioning Technical Report ORNLJesusAlejandroEcheverryMendozaPas encore d'évaluation
- Manual de Pararrayos SiemensDocument120 pagesManual de Pararrayos SiemensfvicunaePas encore d'évaluation
- Challenges and Opportunities For New Pumped Storage DevelopmentDocument33 pagesChallenges and Opportunities For New Pumped Storage Developmentsaradhi26Pas encore d'évaluation
- GEA34801 PHS - Development - Australia - WP - R2 - Full Fed Multiple ProjectsDocument20 pagesGEA34801 PHS - Development - Australia - WP - R2 - Full Fed Multiple ProjectsDeepak GehlotPas encore d'évaluation
- USACE - Water Hammer and Mass Oscillation (WHAMO) Ver. 3.0 - UserDocument256 pagesUSACE - Water Hammer and Mass Oscillation (WHAMO) Ver. 3.0 - UserAdrian FrantescuPas encore d'évaluation
- 300 MW Variable Speed Drives For Pump-Storage Plant Application GoldisthalDocument24 pages300 MW Variable Speed Drives For Pump-Storage Plant Application GoldisthalMiguel Esteban MartinezPas encore d'évaluation
- Unitrol 6000Document12 pagesUnitrol 6000mixed25465688Pas encore d'évaluation
- Kaigah HPP - Executive SummaryDocument27 pagesKaigah HPP - Executive SummaryAli Nawaz Khan100% (1)
- Tr01 11e Shunt Reactors Revision 9Document73 pagesTr01 11e Shunt Reactors Revision 9Sakthi RajPas encore d'évaluation
- GEA33306 BN Hydro Application Guide - R7Document48 pagesGEA33306 BN Hydro Application Guide - R7Viet DinhTrongPas encore d'évaluation
- Lci BrochureDocument20 pagesLci BrochureSergey PavlovPas encore d'évaluation
- 3.6 Guidelines For Electrical Design For SHP Plants Including SwitchyardDocument160 pages3.6 Guidelines For Electrical Design For SHP Plants Including SwitchyardFarid Ahmad Shalahuddin100% (1)
- Silting Problems in Hydro Power Plants - Proceedings of The First ..Document1 pageSilting Problems in Hydro Power Plants - Proceedings of The First ..Rakesh NemadePas encore d'évaluation
- Preliminary Design Hydroelectric Station Problem Without Prime UnitsDocument13 pagesPreliminary Design Hydroelectric Station Problem Without Prime UnitsadnanPas encore d'évaluation
- Converting To Variable Speed at A Pumped-Storage PlantDocument9 pagesConverting To Variable Speed at A Pumped-Storage Plantle hoai NamPas encore d'évaluation
- (ED 01-2017) DoubleFlangedButterfly - WEBDocument28 pages(ED 01-2017) DoubleFlangedButterfly - WEBGourav SharmaPas encore d'évaluation
- Variable Speed OperationDocument10 pagesVariable Speed Operationmunagala balasubramanyamPas encore d'évaluation
- Potential PakistanDocument91 pagesPotential PakistanWasif Bin ArifPas encore d'évaluation
- RE BIZZ Final ReportDocument123 pagesRE BIZZ Final ReportWessel SimonsPas encore d'évaluation
- Selecting Turbine and Generator PDFDocument160 pagesSelecting Turbine and Generator PDFDodik IstiantoPas encore d'évaluation
- Metnum 09Document47 pagesMetnum 09Kdash Kdash SxgaPas encore d'évaluation
- Kaplan TurbineDocument72 pagesKaplan TurbinerizhaypPas encore d'évaluation
- SELEKhrhhCIJA HIDROTURBINADocument107 pagesSELEKhrhhCIJA HIDROTURBINADalibor-Jelena VlaškiPas encore d'évaluation
- Transmission Cost AssumptionsDocument7 pagesTransmission Cost AssumptionsBADRI VENKATESHPas encore d'évaluation
- Hydroelectric Station in IndonesiaDocument7 pagesHydroelectric Station in IndonesiaAhmad FikriPas encore d'évaluation
- Line Cable Parameter Calculation User ManualDocument59 pagesLine Cable Parameter Calculation User Manualamit77999Pas encore d'évaluation
- Modal Analysis Applied To The Stability Study of Hydroelectric Systems With Modular Structures PDFDocument218 pagesModal Analysis Applied To The Stability Study of Hydroelectric Systems With Modular Structures PDFRaghavendra NaikPas encore d'évaluation
- The Benefits of Pumped Storage Hydro To The UKDocument49 pagesThe Benefits of Pumped Storage Hydro To The UKGisa Elsa josePas encore d'évaluation
- Designing of Load Response Generation Synchronized 15MW Hydropower Station and Simulation Based Electromechanical and Structural AnalysisDocument17 pagesDesigning of Load Response Generation Synchronized 15MW Hydropower Station and Simulation Based Electromechanical and Structural AnalysismilanPas encore d'évaluation
- Design of Cross Flow Turbine: March 2018Document40 pagesDesign of Cross Flow Turbine: March 2018Anonymous Hy5Ir9QXPas encore d'évaluation
- Evaluation of CFD Model For Kaplan Draft TubeDocument67 pagesEvaluation of CFD Model For Kaplan Draft Tubeteguh hady aPas encore d'évaluation
- TidongDocument162 pagesTidongSandeep AggarwalPas encore d'évaluation
- EM CostDocument5 pagesEM CosttfahrenkPas encore d'évaluation
- Micro Hydro: Guidance Manual of Procedures For Assessment of Micro Hydro PotentialDocument261 pagesMicro Hydro: Guidance Manual of Procedures For Assessment of Micro Hydro Potentialjamjam75Pas encore d'évaluation
- KhabDocument237 pagesKhabRicha Lal0% (1)
- Draft Tube Calculations Using OpenFOAM-1.5dev and Validation With FLINDT DataDocument26 pagesDraft Tube Calculations Using OpenFOAM-1.5dev and Validation With FLINDT DataKhairy ElsayedPas encore d'évaluation
- Hydro 1Document48 pagesHydro 1Rens Bakker100% (2)
- Rehabilitation of HydropowerDocument103 pagesRehabilitation of HydropowerFrancisco UrbanoPas encore d'évaluation
- PQD Riali-Ii HPPDocument61 pagesPQD Riali-Ii HPPkhanshah1Pas encore d'évaluation
- Daneshkah (2010) - Parametric Design of A Francis Turbine (Método Inverso)Document11 pagesDaneshkah (2010) - Parametric Design of A Francis Turbine (Método Inverso)HorácioPas encore d'évaluation
- Claassens Transient 2008Document365 pagesClaassens Transient 2008ramaiitrPas encore d'évaluation
- IEC Motor Data CalculatorDocument6 pagesIEC Motor Data Calculatordcf67myPas encore d'évaluation
- ERHARD Needle Valve BrochureDocument20 pagesERHARD Needle Valve BrochurephanishankarPas encore d'évaluation
- WEG Hydrogenerators Gh20 14824113 Manual EnglishDocument51 pagesWEG Hydrogenerators Gh20 14824113 Manual EnglishGuilherme RosaPas encore d'évaluation
- TechRef 3-W-Transformer 3phaseDocument40 pagesTechRef 3-W-Transformer 3phaseTorrez JeanPas encore d'évaluation
- Etu02 Mux Plus Manv101Document70 pagesEtu02 Mux Plus Manv101max72ggoPas encore d'évaluation
- G Programming Reference ManualDocument592 pagesG Programming Reference Manualpelouse23Pas encore d'évaluation
- SC-2042-RTD: User ManualDocument40 pagesSC-2042-RTD: User ManualSarath ChandraPas encore d'évaluation
- Manuel SC 2043 SGDocument50 pagesManuel SC 2043 SGgermanPas encore d'évaluation
- The Complete Street Epistemology Guide 1st EdDocument31 pagesThe Complete Street Epistemology Guide 1st Edstipe_curlin5242Pas encore d'évaluation
- Pole Slip Protection On 400 KV Transsmision LineDocument4 pagesPole Slip Protection On 400 KV Transsmision Linestipe_curlin5242Pas encore d'évaluation
- Text StructureDocument2 pagesText Structureapi-322660744Pas encore d'évaluation
- Te) - Te,: (Aû°0) (Aj ') + (0) (Avb)Document2 pagesTe) - Te,: (Aû°0) (Aj ') + (0) (Avb)stipe_curlin5242Pas encore d'évaluation
- ANSI Codes PDFDocument3 pagesANSI Codes PDFelectrical_1012000100% (2)
- Load Representation For Dynamic Performance AnalysisDocument11 pagesLoad Representation For Dynamic Performance AnalysisrnmukerjeePas encore d'évaluation
- Generator DroopDocument60 pagesGenerator DroopGanti1977100% (1)
- Per Unit Calculation MethodDocument3 pagesPer Unit Calculation Methodevonik123456Pas encore d'évaluation
- Load ModellingDocument321 pagesLoad Modellingsrinivascooldude58Pas encore d'évaluation
- Ajjarapu Reactive Power PsercDocument126 pagesAjjarapu Reactive Power Psercstipe_curlin5242Pas encore d'évaluation
- On The Persistence of Dominant Inter-Area Oscillation Paths in Large-Scale Power NetworksDocument6 pagesOn The Persistence of Dominant Inter-Area Oscillation Paths in Large-Scale Power Networksstipe_curlin5242Pas encore d'évaluation
- Modelling Hs08 Script 02Document183 pagesModelling Hs08 Script 02Muhammad Mahfud RosyidiPas encore d'évaluation
- VAriable Speed TurbinesDocument6 pagesVAriable Speed TurbinesmuazeemKPas encore d'évaluation
- Robust Damping of Interarea Oscillations With PDFDocument6 pagesRobust Damping of Interarea Oscillations With PDFAkshay SharmaPas encore d'évaluation
- Damping of Low Frequency Interarea Oscillations Using HVDC Modulation and SVC Voltage SupportDocument16 pagesDamping of Low Frequency Interarea Oscillations Using HVDC Modulation and SVC Voltage SupportSherif HelmyPas encore d'évaluation
- Analysis of Inter-Area Oscillations Via Non-Linear Time Series Analysis TechniquesDocument7 pagesAnalysis of Inter-Area Oscillations Via Non-Linear Time Series Analysis Techniquespramod_bhatt68868Pas encore d'évaluation
- Example of Ajustment Speed ModelDocument5 pagesExample of Ajustment Speed Modelmarinimafe45Pas encore d'évaluation
- Choice of FACTS Device Control Inputs For Damping Interarea OscillationsDocument9 pagesChoice of FACTS Device Control Inputs For Damping Interarea Oscillationsstipe_curlin5242Pas encore d'évaluation
- A New Approach Using Load Control To Dampen Interarea Frequency OscillationsDocument5 pagesA New Approach Using Load Control To Dampen Interarea Frequency Oscillationsstipe_curlin5242Pas encore d'évaluation
- Voltage Collapse and Transient Energy FunctionsDocument158 pagesVoltage Collapse and Transient Energy Functionsstipe_curlin5242Pas encore d'évaluation
- Power System OscillationsDocument9 pagesPower System Oscillationssaghiram8071Pas encore d'évaluation
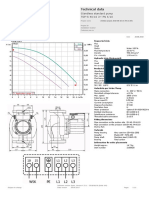
- BOMBAS PRIMARIAS - Data - Sheet - TOP-S - 40 - 10 - 3 - PN - 6 - 10Document1 pageBOMBAS PRIMARIAS - Data - Sheet - TOP-S - 40 - 10 - 3 - PN - 6 - 10Sebastian FuentesPas encore d'évaluation
- IA Search EngineDocument47 pagesIA Search EngineSiswand BIn Mohd AliPas encore d'évaluation
- Population Balance Modelling To Describe The Particle Aggregation Process: A ReviewDocument18 pagesPopulation Balance Modelling To Describe The Particle Aggregation Process: A ReviewAlexander FierroPas encore d'évaluation
- Parts ManualDocument239 pagesParts ManualDavid MaddenPas encore d'évaluation
- First LawDocument10 pagesFirst LawAhmed Al-ayatPas encore d'évaluation
- Norwegian Maritime-Equipment 2016Document568 pagesNorwegian Maritime-Equipment 2016budiazis100% (1)
- Flat Spiral SpringsDocument2 pagesFlat Spiral SpringsBharani DaranPas encore d'évaluation
- Almera n16 Europa Ec-K9kDocument214 pagesAlmera n16 Europa Ec-K9kMARK llPas encore d'évaluation
- Asb - 407 18 117Document15 pagesAsb - 407 18 117edsel jose diaz sarmientoPas encore d'évaluation
- Pleasant Street Hydraulic ManualDocument607 pagesPleasant Street Hydraulic ManualbadralislamPas encore d'évaluation
- Engine Mechanical SectionDocument202 pagesEngine Mechanical Sectionionbolo100% (2)
- Pressure Control For Air and Water Type CSDocument8 pagesPressure Control For Air and Water Type CSmilanPas encore d'évaluation
- 2.3.2 TensileTesting SIMDocument4 pages2.3.2 TensileTesting SIMRaymond NguyenPas encore d'évaluation
- Copeland cr34k6-pfv-875 Article 1377777672152 en SsDocument1 pageCopeland cr34k6-pfv-875 Article 1377777672152 en SsJesus GrilletPas encore d'évaluation
- 09 Silver 4 - M1 EdexcelDocument13 pages09 Silver 4 - M1 Edexcelsh.bonita.editsPas encore d'évaluation
- 2-1TS-60T0-R0 Alloy VerificationDocument17 pages2-1TS-60T0-R0 Alloy VerificationArooba AroojPas encore d'évaluation
- 9600HDDocument8 pages9600HDRodyConnorPas encore d'évaluation
- Confined SpacesDocument27 pagesConfined SpacesDivya RastogiPas encore d'évaluation
- MT4400 Front Brakes (Carlisle)Document15 pagesMT4400 Front Brakes (Carlisle)Brian CareelPas encore d'évaluation
- European Codes - Steel Design To Eurocode 3 (EN 1993-1-1:2005)Document16 pagesEuropean Codes - Steel Design To Eurocode 3 (EN 1993-1-1:2005)Nicoleta cristianPas encore d'évaluation
- Thermosolutal Convection Within A Vertical Porous Enclosure in The Case of A Buoyancy Ratio Balancing The Separation ParameterDocument9 pagesThermosolutal Convection Within A Vertical Porous Enclosure in The Case of A Buoyancy Ratio Balancing The Separation ParameterKheria ZitouniPas encore d'évaluation
- Iom Ad3878001 Powercore Cpc-3 To Cpc-48Document36 pagesIom Ad3878001 Powercore Cpc-3 To Cpc-48Pamukat TranggonoPas encore d'évaluation
- 2008 Carter 12Document38 pages2008 Carter 12PiousPas encore d'évaluation
- K GBDocument18 pagesK GBLuis Fernando Juchani MoralesPas encore d'évaluation
- Everything You Need To Know About CarburetorsDocument7 pagesEverything You Need To Know About CarburetorsDoran100% (1)
- Mechanics of Fluids 5th Edition Potter Wiggert Ramadan Test BankDocument12 pagesMechanics of Fluids 5th Edition Potter Wiggert Ramadan Test Banklynn100% (15)
- Tornado 1300 GIIIDocument46 pagesTornado 1300 GIIIFeRFer (FeRFEr)Pas encore d'évaluation