Vous aimerez peut-être aussi
- Subconscious MindDocument35 pagesSubconscious MindRohit Lad100% (3)
- FeedConunit 2Document51 pagesFeedConunit 2Jerc ZajPas encore d'évaluation
- Destiny Analysis of Roger FedererDocument4 pagesDestiny Analysis of Roger Federerjerryking685Pas encore d'évaluation
- Cucan Pemo - What Does Your Man Really Want PDFDocument34 pagesCucan Pemo - What Does Your Man Really Want PDFteslPas encore d'évaluation
- DJ Dunn Physical ModelsDocument28 pagesDJ Dunn Physical ModelsarietoxPas encore d'évaluation
- Class Field Theory, MilneDocument230 pagesClass Field Theory, MilneMiguel Naupay100% (1)
- A Research Paper For Comparative Public LawsDocument9 pagesA Research Paper For Comparative Public LawsYogesh KumarPas encore d'évaluation
- Barabas in Patimile Lui IisusDocument26 pagesBarabas in Patimile Lui IisusElena Catalina ChiperPas encore d'évaluation
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulPas encore d'évaluation
- 7e's Lesson Plan in Science 3Document2 pages7e's Lesson Plan in Science 3Donna Catbagan Agbunag91% (23)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Lesson Plan - Bullying 3Document3 pagesLesson Plan - Bullying 3api-438012581Pas encore d'évaluation
- Basic Elements of Control SystemDocument36 pagesBasic Elements of Control Systemeugeni madaPas encore d'évaluation
- Mathematical Models: Module - 2Document13 pagesMathematical Models: Module - 2Rajath UpadhyaPas encore d'évaluation
- Mathematical Modelling in Control SystemDocument2 pagesMathematical Modelling in Control System12343567890Pas encore d'évaluation
- EEE 3201 Week 3Document12 pagesEEE 3201 Week 3harun or rashidPas encore d'évaluation
- Module 2 Controls PDFDocument24 pagesModule 2 Controls PDFPrincess LutivaPas encore d'évaluation
- 15ECE302 Control Systems Engineering: Chapter 2: Modelling in Frequency DomainDocument41 pages15ECE302 Control Systems Engineering: Chapter 2: Modelling in Frequency DomainSandeepPas encore d'évaluation
- Experiment 2Document8 pagesExperiment 2Usama NadeemPas encore d'évaluation
- Chapter TwoDocument32 pagesChapter TwowabdushukurPas encore d'évaluation
- Modelling of Electrical SystemsDocument3 pagesModelling of Electrical SystemsPandu KPas encore d'évaluation
- Chapter 2 Mathematical Modeling of Dynamic SystemDocument56 pagesChapter 2 Mathematical Modeling of Dynamic SystemAmanuel AsfawPas encore d'évaluation
- Unit 2: Transfer Function: PrefaceDocument9 pagesUnit 2: Transfer Function: PrefaceNeans PlanterasPas encore d'évaluation
- Summary of Topic Covered in ECE408Document89 pagesSummary of Topic Covered in ECE408Nishikata ManipolPas encore d'évaluation
- Chapter ThreeDocument13 pagesChapter ThreeGetahun tuluPas encore d'évaluation
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- Ic6501 Control SystemsDocument67 pagesIc6501 Control SystemsK.Sushita VISTASPas encore d'évaluation
- Instructor: Asst Prof Dr. Muhammad Imran Lecture 2Document53 pagesInstructor: Asst Prof Dr. Muhammad Imran Lecture 2Muhammad ZainPas encore d'évaluation
- 15MC405 Control System Assignment 1Document3 pages15MC405 Control System Assignment 1sivaeeinfoPas encore d'évaluation
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoPas encore d'évaluation
- MSD2Document47 pagesMSD2moePas encore d'évaluation
- EEE 3201: Control System I: Week 2: Lecture 1Document11 pagesEEE 3201: Control System I: Week 2: Lecture 1harun or rashidPas encore d'évaluation
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahPas encore d'évaluation
- EEN 407 Sample QuestionsDocument41 pagesEEN 407 Sample QuestionsAbu SiddiquePas encore d'évaluation
- Mathematical ModelingDocument7 pagesMathematical ModelingTahmid ShihabPas encore d'évaluation
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Lecture 2b ModelingDocument40 pagesLecture 2b ModelingCharles CalibrePas encore d'évaluation
- Mathematical Models of SystemsDocument45 pagesMathematical Models of SystemsSaid Ahmed AliPas encore d'évaluation
- Simulation of Electric Machinery and Power Electronics InterfacingDocument6 pagesSimulation of Electric Machinery and Power Electronics Interfacingadilo7780Pas encore d'évaluation
- MCC Mini ProjetDocument5 pagesMCC Mini ProjetMohammed Amine SayehPas encore d'évaluation
- Modeling of Electrical SystemsDocument32 pagesModeling of Electrical SystemsMohamedElsawiPas encore d'évaluation
- Modeling in The Time DomainDocument19 pagesModeling in The Time DomainAnonymous 55cH67eIxPas encore d'évaluation
- Reviewer ControlDocument10 pagesReviewer ControlDioyo, ArviePas encore d'évaluation
- Control Systems-Part-3Document45 pagesControl Systems-Part-3Engr. Muhammad IkhlaqPas encore d'évaluation
- Mini Problem s2 2023Document5 pagesMini Problem s2 2023Annette TageufouePas encore d'évaluation
- Notes Chapter 2aDocument6 pagesNotes Chapter 2aMohd Hafiz Zainol AbidinPas encore d'évaluation
- 01 Automatic Control System Modeling and RepresentationDocument55 pages01 Automatic Control System Modeling and RepresentationPaul BonaPas encore d'évaluation
- Module 1Document30 pagesModule 1Vibin NivasPas encore d'évaluation
- Mathetical ModelDocument3 pagesMathetical ModelOscar AvilesPas encore d'évaluation
- Load Flow or Power Flow Analysis-Converted-CompressedDocument8 pagesLoad Flow or Power Flow Analysis-Converted-CompressedPreetam MandalPas encore d'évaluation
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CPas encore d'évaluation
- AE6505 Control EngineeringDocument9 pagesAE6505 Control Engineeringsathesh waranPas encore d'évaluation
- Nonlinear Model Identification For Inverter of AMB-Flywheel SystemDocument6 pagesNonlinear Model Identification For Inverter of AMB-Flywheel SystemCyberJournals MultidisciplinaryPas encore d'évaluation
- Chap 2 1 Modeling in Freq 1Document48 pagesChap 2 1 Modeling in Freq 1Furkan DedePas encore d'évaluation
- Modeling of Multi-Converter More Electric Ship Power Systems Using The Generalized State Space MethodDocument6 pagesModeling of Multi-Converter More Electric Ship Power Systems Using The Generalized State Space MethodSandy RonaldoPas encore d'évaluation
- 1 Transfer FunctionDocument56 pages1 Transfer FunctionAbdulGhaffar100% (1)
- Modeling and Experimental Validation of A First Order Plant Model: DC Servo MotorDocument17 pagesModeling and Experimental Validation of A First Order Plant Model: DC Servo Motormeghraj01Pas encore d'évaluation
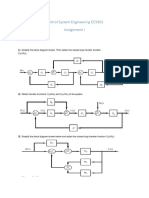
- Control System Engineering EC3301 Assignment I: Practice Following ProblemsDocument2 pagesControl System Engineering EC3301 Assignment I: Practice Following ProblemsAparajita PanigrahiPas encore d'évaluation
- CH 2Document95 pagesCH 2유지상Pas encore d'évaluation
- Transfer FunctionDocument8 pagesTransfer FunctionAzharul IslamPas encore d'évaluation
- Harmonic Analysis of Three Phase PWM Inverter Systems Using MatlabDocument8 pagesHarmonic Analysis of Three Phase PWM Inverter Systems Using Matlabturbo385Pas encore d'évaluation
- Gujarat Technological University: InstructionsDocument4 pagesGujarat Technological University: Instructionsvatsalshah24Pas encore d'évaluation
- EE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignDocument4 pagesEE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignAbdalla FathyPas encore d'évaluation
- CS 2255 Control Systems Question BankDocument62 pagesCS 2255 Control Systems Question BankreporterrajiniPas encore d'évaluation
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDocument22 pagesInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidPas encore d'évaluation
- Slide 2Document89 pagesSlide 2EnesVSPas encore d'évaluation
- Introduction and Chapter Objectives: Real Analog - Circuits 1 Chapter 4: Systems and Network TheoremsDocument42 pagesIntroduction and Chapter Objectives: Real Analog - Circuits 1 Chapter 4: Systems and Network TheoremskrajasekarantutiPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- Cambridge Assessment International Education: Islamiyat 0493/22 May/June 2018Document9 pagesCambridge Assessment International Education: Islamiyat 0493/22 May/June 2018kashmalaPas encore d'évaluation
- Demon The Fallen CoreDocument49 pagesDemon The Fallen CoreGolub87Pas encore d'évaluation
- Math Unit PlanDocument9 pagesMath Unit Planapi-351100842Pas encore d'évaluation
- (Hinduism) John M. Denton - Gems of Advaita Vedanta - Philosophy of Unity_ A Sanskrit Reader with Selected Significant Philosophical Excerpts from the Upanishads, Bhagavad Gita, Vivekacudamani and OthDocument144 pages(Hinduism) John M. Denton - Gems of Advaita Vedanta - Philosophy of Unity_ A Sanskrit Reader with Selected Significant Philosophical Excerpts from the Upanishads, Bhagavad Gita, Vivekacudamani and OthAlexandre RosasPas encore d'évaluation
- Capital Investment Decisions: Cornerstones of Managerial Accounting, 4eDocument38 pagesCapital Investment Decisions: Cornerstones of Managerial Accounting, 4eGeorgia HolstPas encore d'évaluation
- Names and Titles of Shaykh 'Abd Al-Qadir Al-Jilani Radi ALLAHu Ta'ala AnhoDocument7 pagesNames and Titles of Shaykh 'Abd Al-Qadir Al-Jilani Radi ALLAHu Ta'ala AnhoMohammed Abdul Hafeez, B.Com., Hyderabad, India100% (1)
- No. 07 A'rafDocument31 pagesNo. 07 A'rafNafee MahatabPas encore d'évaluation
- Meridith Neuer ResumeDocument3 pagesMeridith Neuer Resumeapi-317819795Pas encore d'évaluation
- Psychological Science: Facial Expressions of Emotion: New Findings, New QuestionsDocument6 pagesPsychological Science: Facial Expressions of Emotion: New Findings, New QuestionsIoana PascalPas encore d'évaluation
- Polymorphic or Pantheistic Deities PDFDocument16 pagesPolymorphic or Pantheistic Deities PDFsoha elmahdyPas encore d'évaluation
- 7 Augustine PDFDocument6 pages7 Augustine PDFJonabel OsioPas encore d'évaluation
- SST Vs BBTDocument7 pagesSST Vs BBTFlaxkikare100% (1)
- Bob Plant - Derrida and PyrrhonismDocument20 pagesBob Plant - Derrida and PyrrhonismMark CohenPas encore d'évaluation
- Romantic Criticism of Shakespearen DramaDocument202 pagesRomantic Criticism of Shakespearen DramaRafael EscobarPas encore d'évaluation
- Annotated Bibliography For Defining Religion in Philippine ContextDocument10 pagesAnnotated Bibliography For Defining Religion in Philippine ContextMike FastPas encore d'évaluation
- ACFrOgBDKi7L1cjBgGefL7nMk MmkqaNMh67RuEedOJi KAScEvPQvDBRntnzxzUthm D0fySj9r4 3R8YQm7rV4Pk3o6OXf PDKYOR6qc 6DvQKTzphz8W2ayh 5KPHcmNR2CvPFvNrYr0IALooDocument5 pagesACFrOgBDKi7L1cjBgGefL7nMk MmkqaNMh67RuEedOJi KAScEvPQvDBRntnzxzUthm D0fySj9r4 3R8YQm7rV4Pk3o6OXf PDKYOR6qc 6DvQKTzphz8W2ayh 5KPHcmNR2CvPFvNrYr0IALooAvijit dasPas encore d'évaluation
- Eid Milad Un NabiDocument5 pagesEid Milad Un NabiShahid Khan100% (1)
- Business Ethics Decision SheetDocument1 pageBusiness Ethics Decision SheetChanchal PriyaPas encore d'évaluation
- Module 1 Crim 4Document25 pagesModule 1 Crim 4Emmanuel James BasPas encore d'évaluation
- Avi 3 MsyllabusDocument3 pagesAvi 3 Msyllabusapi-352095206Pas encore d'évaluation
- Fundamentals of Shipping - Final Lesson PlanDocument11 pagesFundamentals of Shipping - Final Lesson PlanRamalingam Chandrasekharan100% (1)
- Dispelling Some Common Myths About AstrologyDocument14 pagesDispelling Some Common Myths About AstrologyAlesha RosePas encore d'évaluation