Vous aimerez peut-être aussi
- MEDAL How To InstallDocument35 pagesMEDAL How To InstallsantoshmphilPas encore d'évaluation
- Basic Embedded System Design Tutorial PDFDocument204 pagesBasic Embedded System Design Tutorial PDFsantoshmphilPas encore d'évaluation
- ResearchDocument20 pagesResearchsantoshmphilPas encore d'évaluation
- LCDDocument4 pagesLCDsantoshmphilPas encore d'évaluation
- Edsin 51Document34 pagesEdsin 51santoshmphilPas encore d'évaluation
- Edsin 51Document34 pagesEdsin 51santoshmphilPas encore d'évaluation
- Java Objects: Academic Resource CenterDocument16 pagesJava Objects: Academic Resource CentersantoshmphilPas encore d'évaluation
- XLX s6 Lx75t Dev-Ug Reva032811Document36 pagesXLX s6 Lx75t Dev-Ug Reva032811santoshmphilPas encore d'évaluation
- EdSim51 - Notes On The 8051Document16 pagesEdSim51 - Notes On The 8051santoshmphilPas encore d'évaluation
- XLX s6 Lx75t Dev-Ug Reva032811Document36 pagesXLX s6 Lx75t Dev-Ug Reva032811santoshmphilPas encore d'évaluation
- Xilinx Motor Solutions ADI Short June 2012Document56 pagesXilinx Motor Solutions ADI Short June 2012santoshmphilPas encore d'évaluation
- LCDDocument4 pagesLCDsantoshmphilPas encore d'évaluation
- Xilinx Motor Solutions ADI Short June 2012Document56 pagesXilinx Motor Solutions ADI Short June 2012santoshmphilPas encore d'évaluation
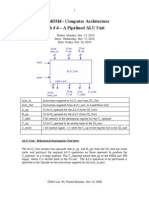
- ECE 4DM4 - Computer Architecture Lab # 4 - A Pipelined ALU UnitDocument8 pagesECE 4DM4 - Computer Architecture Lab # 4 - A Pipelined ALU UnitsantoshmphilPas encore d'évaluation
- CH 3Document58 pagesCH 3Ajay PariharPas encore d'évaluation
- Signalexpress™ Tektronix Edition (Te) Software: Seamless Instrument-To-Pc Connectivity SolutionDocument2 pagesSignalexpress™ Tektronix Edition (Te) Software: Seamless Instrument-To-Pc Connectivity SolutionsantoshmphilPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Software Testing ToolsDocument79 pagesSoftware Testing ToolsPrabu DevaPas encore d'évaluation
- 11.SAP BO InfoView PDFDocument46 pages11.SAP BO InfoView PDFMaryem SAKETPas encore d'évaluation
- Bank Management System MS SQLDocument18 pagesBank Management System MS SQLmsc csPas encore d'évaluation
- PA - 00271 Software Support Policy - General OverviewDocument2 pagesPA - 00271 Software Support Policy - General Overviewimtiaz1113Pas encore d'évaluation
- Gelinas 9e - CH 04 - Documenting Information Systems PDFDocument44 pagesGelinas 9e - CH 04 - Documenting Information Systems PDFJean FlordelizPas encore d'évaluation
- SAP How To Step by Step Guide With Screen ShotDocument41 pagesSAP How To Step by Step Guide With Screen ShotKishore ReddyPas encore d'évaluation
- ASM1-Presentation - Nguyen Tat TrungDocument38 pagesASM1-Presentation - Nguyen Tat TrungTrung Nguyễn TấtPas encore d'évaluation
- Incompletion Log in SDDocument9 pagesIncompletion Log in SDLokamPas encore d'évaluation
- CCNA Training New CCNA - SNMP QuestionsDocument2 pagesCCNA Training New CCNA - SNMP Questionsokotete evidencePas encore d'évaluation
- Firewalls: Dr.P.V.Lakshmi Information Technology GIT, GITAM UniversityDocument31 pagesFirewalls: Dr.P.V.Lakshmi Information Technology GIT, GITAM UniversityNishant MadaanPas encore d'évaluation
- AdsfDocument3 pagesAdsfrohit malviPas encore d'évaluation
- CPP AssignmentDocument13 pagesCPP AssignmentNiranga Dilshan Gonapinuwala WithanagePas encore d'évaluation
- FT-FGT-INF - FortiGate InfrastructureDocument3 pagesFT-FGT-INF - FortiGate InfrastructurezayalaksmePas encore d'évaluation
- Grid Upgrade& PSU Patch Steps - 21-08-14Document21 pagesGrid Upgrade& PSU Patch Steps - 21-08-14Pradeep SPas encore d'évaluation
- CS8662 - Mobile Application Development Lab ManualDocument66 pagesCS8662 - Mobile Application Development Lab ManualBharath kumar67% (3)
- PokemonGo Bot Install - BatDocument2 pagesPokemonGo Bot Install - BatariPas encore d'évaluation
- X2R2-WP6-D-BTS-051-01 - System Requirements Specification (SRS) For Integration LayerDocument197 pagesX2R2-WP6-D-BTS-051-01 - System Requirements Specification (SRS) For Integration LayerDaniel DulanPas encore d'évaluation
- Master Direction Draft On Information Technology Governance Risk ControlsDocument15 pagesMaster Direction Draft On Information Technology Governance Risk Controlsabee narayanPas encore d'évaluation
- Rel 3.0.0.30092021 - CloudSAMS SchoolsDocument5 pagesRel 3.0.0.30092021 - CloudSAMS SchoolsTest 4Pas encore d'évaluation
- Console Bacula PDFDocument51 pagesConsole Bacula PDFPedro TovarPas encore d'évaluation
- Find The List of SAP Transaction CodesDocument1 pageFind The List of SAP Transaction Codeskheidee2Pas encore d'évaluation
- PassfileDocument27 pagesPassfileDaniel Smk60% (5)
- Introduction To Database Management System: 1.1 DataDocument9 pagesIntroduction To Database Management System: 1.1 DataNabin ShresthaPas encore d'évaluation
- BigFix Patch AIX User GuideDocument139 pagesBigFix Patch AIX User GuideR VPas encore d'évaluation
- Connectivity Set Up - SAP EWM and S4 HANADocument5 pagesConnectivity Set Up - SAP EWM and S4 HANAAruna DasPas encore d'évaluation
- Free PDF Ebook - Com OsCommerce TutorialDocument17 pagesFree PDF Ebook - Com OsCommerce TutorialLeo TranPas encore d'évaluation
- Unit 1: Business Consolidation With SAP Group Reporting OverviewDocument3 pagesUnit 1: Business Consolidation With SAP Group Reporting Overviews4hanasd 1809Pas encore d'évaluation
- Am51 Error RefDocument892 pagesAm51 Error Refseenu651Pas encore d'évaluation
- RPM Command Cheat Sheet For LinuxDocument1 pageRPM Command Cheat Sheet For LinuxAvidPas encore d'évaluation
- Security, Backup, Recovery, Tuning, Testing of Data Mining and WarehousingDocument16 pagesSecurity, Backup, Recovery, Tuning, Testing of Data Mining and Warehousingdeepika2804Pas encore d'évaluation