Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 1990 2004.yamaha - Yfm350x.warrior - Factory.service - ManualDocument3 pages1990 2004.yamaha - Yfm350x.warrior - Factory.service - ManualBobbi Jo Bach-Oachs50% (2)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
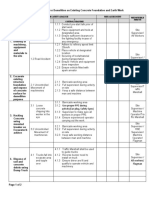
- ULSADO-JSA-Demolation Existing Concrete FoundationDocument2 pagesULSADO-JSA-Demolation Existing Concrete FoundationKelvin Tan75% (4)
- Wetex Middle East Exhibitors 2016Document7 pagesWetex Middle East Exhibitors 2016Dinkar JoshiPas encore d'évaluation
- Mosquito RepellentDocument6 pagesMosquito RepellentJai MurugeshPas encore d'évaluation
- Ship Rudder Types and Design FeaturesDocument10 pagesShip Rudder Types and Design FeaturesAurvin SinghPas encore d'évaluation
- Domino A Series Classic Spares CatalogueDocument137 pagesDomino A Series Classic Spares CatalogueKoos Roets100% (2)
- Boiler FormulasDocument5 pagesBoiler FormulasAnonymous 6Mb7PZjPas encore d'évaluation
- Event Study PostDocument5 pagesEvent Study PostPete Jacopo Belbo CayaPas encore d'évaluation
- Book Notes - The Thirty Years War PDFDocument1 pageBook Notes - The Thirty Years War PDFPete Jacopo Belbo CayaPas encore d'évaluation
- Scientific Computing Assignment 1Document5 pagesScientific Computing Assignment 1Pete Jacopo Belbo CayaPas encore d'évaluation
- Set 5Document52 pagesSet 5Ron ChanPas encore d'évaluation
- Notes 2: Additional Vocab, Sobolev SpacesDocument1 pageNotes 2: Additional Vocab, Sobolev SpacesPete Jacopo Belbo CayaPas encore d'évaluation
- Bias Variance and Cross Validation NotesDocument1 pageBias Variance and Cross Validation NotesPete Jacopo Belbo CayaPas encore d'évaluation
- Re SamplingDocument10 pagesRe SamplingPete Jacopo Belbo CayaPas encore d'évaluation
- Notes 1: Introduction and DefinitionsDocument3 pagesNotes 1: Introduction and DefinitionsPete Jacopo Belbo CayaPas encore d'évaluation
- Bias Variance and Cross Validation NotesDocument1 pageBias Variance and Cross Validation NotesPete Jacopo Belbo CayaPas encore d'évaluation
- Logistic Regression Analysis of Credit Card Default RiskDocument29 pagesLogistic Regression Analysis of Credit Card Default RiskPete Jacopo Belbo Caya100% (1)
- Re SamplingDocument10 pagesRe SamplingPete Jacopo Belbo CayaPas encore d'évaluation
- Exploratory Analysis1Document2 pagesExploratory Analysis1Pete Jacopo Belbo CayaPas encore d'évaluation
- Study Guide For The Mathematics of Statistical Learning: Peter Caya 2/26/2016Document3 pagesStudy Guide For The Mathematics of Statistical Learning: Peter Caya 2/26/2016Pete Jacopo Belbo CayaPas encore d'évaluation
- Covar Matrix Proof StudentizedResidualsDocument3 pagesCovar Matrix Proof StudentizedResidualsPete Jacopo Belbo CayaPas encore d'évaluation
- Linear Regression Notes and PitfallsDocument5 pagesLinear Regression Notes and PitfallsPete Jacopo Belbo CayaPas encore d'évaluation
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionDocument4 pagesESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaPas encore d'évaluation
- Question 4 Scientific ComputingDocument3 pagesQuestion 4 Scientific ComputingPete Jacopo Belbo CayaPas encore d'évaluation
- Chapter 5: Basis Functions and RegularizationDocument4 pagesChapter 5: Basis Functions and RegularizationPete Jacopo Belbo CayaPas encore d'évaluation
- Scientific Computing Notes 10-17Document2 pagesScientific Computing Notes 10-17Pete Jacopo Belbo CayaPas encore d'évaluation
- Morozov's Principle for Regularizing Inverse ProblemsDocument4 pagesMorozov's Principle for Regularizing Inverse ProblemsPete Jacopo Belbo CayaPas encore d'évaluation
- LcurveDocument23 pagesLcurvePete Jacopo Belbo CayaPas encore d'évaluation
- Kunisch and Zou NotesDocument7 pagesKunisch and Zou NotesPete Jacopo Belbo CayaPas encore d'évaluation
- Lecture 2 NPDEDocument3 pagesLecture 2 NPDEPete Jacopo Belbo CayaPas encore d'évaluation
- Homework 9 Q1Document2 pagesHomework 9 Q1Pete Jacopo Belbo CayaPas encore d'évaluation
- Advection Equation NotesDocument2 pagesAdvection Equation NotesPete Jacopo Belbo CayaPas encore d'évaluation
- Basic Notes Project 2Document3 pagesBasic Notes Project 2Pete Jacopo Belbo CayaPas encore d'évaluation
- Npde Notes 10 - 30Document4 pagesNpde Notes 10 - 30Pete Jacopo Belbo CayaPas encore d'évaluation
- Linear PDE Plane Wave Dispersion RelationDocument2 pagesLinear PDE Plane Wave Dispersion RelationPete Jacopo Belbo CayaPas encore d'évaluation
- Fact Sheet Functional AnalysisDocument9 pagesFact Sheet Functional AnalysisPete Jacopo Belbo CayaPas encore d'évaluation
- Digital Logic Families GuideDocument82 pagesDigital Logic Families Guidemoney_kandan2004Pas encore d'évaluation
- Main Engine Fuel Pump Drive Roller Damage: Return To TOCDocument2 pagesMain Engine Fuel Pump Drive Roller Damage: Return To TOCTunaPas encore d'évaluation
- Company Profile Pt. DutaflowDocument62 pagesCompany Profile Pt. DutaflowRizkiRamadhanPas encore d'évaluation
- 20&604 WDSeriesDocument2 pages20&604 WDSeriesbiteme99Pas encore d'évaluation
- Radiography 2 ProcedureDocument9 pagesRadiography 2 ProceduresheikmoinPas encore d'évaluation
- PW DebugDocument2 pagesPW DebugAimeeFieldsPas encore d'évaluation
- Multiple Stiffened Cold-Formed Steel Profiles For Cylindrical Vault Roofing SystemsDocument24 pagesMultiple Stiffened Cold-Formed Steel Profiles For Cylindrical Vault Roofing SystemsTiago LopesPas encore d'évaluation
- Lecture - Force MethodDocument73 pagesLecture - Force MethodF FPas encore d'évaluation
- Tobaco VaccDocument19 pagesTobaco VaccSisay KebebePas encore d'évaluation
- Aegis Multifunction RelayDocument4 pagesAegis Multifunction RelaySuranjana DasPas encore d'évaluation
- GRI - GM22 SpecificationDocument30 pagesGRI - GM22 SpecificationГригорий ЛевашовPas encore d'évaluation
- Microstrip AntennaDocument24 pagesMicrostrip AntennaUdit Sharma100% (1)
- Oracle Silent InstallDocument5 pagesOracle Silent InstallAnuj SinghPas encore d'évaluation
- WRCLA Designers HandbookDocument11 pagesWRCLA Designers HandbookHoang NguyenPas encore d'évaluation
- E1 - Controlled Rectifiers PDF NotesDocument84 pagesE1 - Controlled Rectifiers PDF NotesSatyanarayana Gurram100% (1)
- QSEE6800+H Signal Monitor Video and Thumbnail Streamer: Installation and Operation ManualDocument86 pagesQSEE6800+H Signal Monitor Video and Thumbnail Streamer: Installation and Operation ManualTechne PhobosPas encore d'évaluation
- Acer Ferrari 3400 Laptop ManualDocument113 pagesAcer Ferrari 3400 Laptop Manualmoming1Pas encore d'évaluation
- Trouble ShootingDocument3 pagesTrouble Shootingsami4330Pas encore d'évaluation
- Furniture Plans How To Build A Rocking ChairDocument10 pagesFurniture Plans How To Build A Rocking ChairAntónio SousaPas encore d'évaluation
- Galaxy Electrical: Zener DiodesDocument3 pagesGalaxy Electrical: Zener Diodesdragon-red0816Pas encore d'évaluation
- 2023.04.24 BSNL FTTH LeafletDocument2 pages2023.04.24 BSNL FTTH LeafletSatan SinghPas encore d'évaluation
- High Precision Ball Bearings SolutionsDocument71 pagesHigh Precision Ball Bearings SolutionsTravis DavisPas encore d'évaluation