Vous aimerez peut-être aussi
- Spark: Opportunity To Carryout Research/ Thesis Work in Csir C-MmacsDocument1 pageSpark: Opportunity To Carryout Research/ Thesis Work in Csir C-MmacsMandar ChikatePas encore d'évaluation
- A.1 - Analytical Position Solution For Four-Bar: PpendixDocument4 pagesA.1 - Analytical Position Solution For Four-Bar: PpendixMandar ChikatePas encore d'évaluation
- Stronger Together en WebDocument8 pagesStronger Together en WebMandar ChikatePas encore d'évaluation
- Passive Vibration Control Via Unusual Geometries: The Application of Genetic Algorithm Optimization To Structural DesignDocument13 pagesPassive Vibration Control Via Unusual Geometries: The Application of Genetic Algorithm Optimization To Structural DesignMandar ChikatePas encore d'évaluation
- Brand Buzz - To Differentiate Itself Through Creative Marketing CommunicationDocument3 pagesBrand Buzz - To Differentiate Itself Through Creative Marketing CommunicationMandar ChikatePas encore d'évaluation
- Vodafone The Zoozoo CampaignPART1Document24 pagesVodafone The Zoozoo CampaignPART1Mandar ChikatePas encore d'évaluation
- AdamsDocument42 pagesAdamsMandar ChikatePas encore d'évaluation
- CylindersDocument17 pagesCylindersMandar ChikatePas encore d'évaluation
- Electrochemical Machining: Dr. P KuppanDocument35 pagesElectrochemical Machining: Dr. P KuppanMandar ChikatePas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- List of Useful Keyboard Shortcuts For Command Prompt in WindowsDocument7 pagesList of Useful Keyboard Shortcuts For Command Prompt in WindowsMahmudul HasanPas encore d'évaluation
- Solid Fuel Boiler Control Standard 2: Version 1.0) Version 1.0) Version 1.0) Version 1.0)Document26 pagesSolid Fuel Boiler Control Standard 2: Version 1.0) Version 1.0) Version 1.0) Version 1.0)Ana Odzaklieska Krste SmileskiPas encore d'évaluation
- Open Foundation With Eccentric Loading and Moments-FinalDocument6 pagesOpen Foundation With Eccentric Loading and Moments-FinalMahadev Sastry100% (1)
- Anmlab 67 5451074084 5451074092Document9 pagesAnmlab 67 5451074084 5451074092Quoc Vuong HoangPas encore d'évaluation
- Grafico Miller 1965 PDFDocument1 pageGrafico Miller 1965 PDFJaviera AlejandraPas encore d'évaluation
- SIEMENS Manfred Pohl 20120523cigre2012Document23 pagesSIEMENS Manfred Pohl 20120523cigre2012suraiyya begumPas encore d'évaluation
- History: Aviation Is The Practical Aspect or Art ofDocument3 pagesHistory: Aviation Is The Practical Aspect or Art ofEarle J ZaficoPas encore d'évaluation
- Digital Time StampingDocument22 pagesDigital Time StampingSunil Vicky VohraPas encore d'évaluation
- Regular Expressions in QTPDocument15 pagesRegular Expressions in QTPBhargav S RajendraPas encore d'évaluation
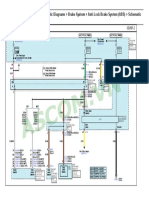
- 2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsDocument1 page2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsHuy Trần QuốcPas encore d'évaluation
- Brushless ExcitationDocument4 pagesBrushless Excitationmsovais6792100% (2)
- 2.1 System Requirement SpecificationDocument30 pages2.1 System Requirement SpecificationAtif NiazPas encore d'évaluation
- Passive Trap Filter For Harmonic ReductionDocument9 pagesPassive Trap Filter For Harmonic ReductionShiva KumarPas encore d'évaluation
- Industrial Training ReportDocument19 pagesIndustrial Training ReportRam PandeyPas encore d'évaluation
- Noise Mapping in FactoryDocument5 pagesNoise Mapping in FactoryNor RazmanPas encore d'évaluation
- Week 1: Directing and Managing Project ExecutionDocument10 pagesWeek 1: Directing and Managing Project ExecutionAnonymous 4eQB3WZPas encore d'évaluation
- Evo BSC 8200Document14 pagesEvo BSC 8200muhammadasifrashid78% (9)
- An ARN 147V Data SheetDocument2 pagesAn ARN 147V Data SheetStrawichDanielPas encore d'évaluation
- L14 15 ABCD and S ParametersDocument15 pagesL14 15 ABCD and S ParametersAmeya KadamPas encore d'évaluation
- Call For Interview Phase V - Mbeya University.Document13 pagesCall For Interview Phase V - Mbeya University.Rashid BumarwaPas encore d'évaluation
- Brosur SikaDocument7 pagesBrosur SikachaerulPas encore d'évaluation
- Introduction of Technical Drawing (Automotive Major)Document10 pagesIntroduction of Technical Drawing (Automotive Major)Jake Casiple100% (1)
- Crusher House OperationDocument21 pagesCrusher House Operationratan das0% (1)
- Parts Manual CB 434dDocument667 pagesParts Manual CB 434dMarceloGago100% (2)
- SurgeTest EPCOSDocument33 pagesSurgeTest EPCOSSabina MaukoPas encore d'évaluation
- FLOOR PLAN - PDF Version 1Document1 pageFLOOR PLAN - PDF Version 1Carlisle ChuaPas encore d'évaluation
- Float Switch Price ChartDocument3 pagesFloat Switch Price ChartratneshtPas encore d'évaluation
- Extended Aeration Treatment System 22Document13 pagesExtended Aeration Treatment System 22ashe zinab0% (1)
- H-DC-0023 (AP) Economy Manual Dishwashing LiquidDocument1 pageH-DC-0023 (AP) Economy Manual Dishwashing LiquidShiraz Khan83% (6)
- db2 Fundamentals Aix PDFDocument503 pagesdb2 Fundamentals Aix PDFpndeepika50% (2)