Vous aimerez peut-être aussi
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Document5 pagesWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiPas encore d'évaluation
- Quantitative School of ManagementDocument3 pagesQuantitative School of ManagementVAIBHAV JAIN100% (1)
- Solving ODE Symbolically in MATLABDocument5 pagesSolving ODE Symbolically in MATLABjojonPas encore d'évaluation
- Solving Ordinary Differential Equations With MatlabDocument22 pagesSolving Ordinary Differential Equations With MatlabMario ZamoraPas encore d'évaluation
- The Fokker-Planck EquationDocument12 pagesThe Fokker-Planck EquationslamPas encore d'évaluation
- FORTRAN 77 Lesson 7: 1 Numerical IntegrationDocument7 pagesFORTRAN 77 Lesson 7: 1 Numerical IntegrationManjita BudhirajaPas encore d'évaluation
- The Cube Roots of Unity: David Arnold February 25, 2003Document16 pagesThe Cube Roots of Unity: David Arnold February 25, 2003Rituraj BoruahPas encore d'évaluation
- Advanced DifferentiationDocument13 pagesAdvanced Differentiationangry_granPas encore d'évaluation
- Maulina Putri Lestari - M0220052 - Tugas 3Document10 pagesMaulina Putri Lestari - M0220052 - Tugas 3Maulina Putri LestariPas encore d'évaluation
- Tai Lieu MatlabDocument4 pagesTai Lieu MatlabLê Công HiếuPas encore d'évaluation
- ENEE 660 HW Sol #7Document8 pagesENEE 660 HW Sol #7PeacefulLionPas encore d'évaluation
- Examples NLSDocument5 pagesExamples NLSKirti Deo MishraPas encore d'évaluation
- Lab Maple8 TutorialDocument10 pagesLab Maple8 TutorialPop RobertPas encore d'évaluation
- Runge-Kutta Methods For ODE Systems: Ordinary Differential EquationsDocument8 pagesRunge-Kutta Methods For ODE Systems: Ordinary Differential EquationsEmir NezirićPas encore d'évaluation
- Assignment 1Document2 pagesAssignment 1Prasanna ⎝⏠⏝⏠⎠Pas encore d'évaluation
- ECE 602 Solution To Homework Assignment 4Document7 pagesECE 602 Solution To Homework Assignment 4souleyman hassanPas encore d'évaluation
- Hicstat FDEDocument19 pagesHicstat FDEPravita Agustin CahyaningrumPas encore d'évaluation
- Numerical Methods For Second Order Differential EquationDocument15 pagesNumerical Methods For Second Order Differential Equationfarshan296015Pas encore d'évaluation
- Poisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DDocument6 pagesPoisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DRuben Dario Guerrero EPas encore d'évaluation
- Hour Exam 3 SolutionsDocument4 pagesHour Exam 3 SolutionscekardPas encore d'évaluation
- Winter07 Rosen ReflectionsDocument10 pagesWinter07 Rosen ReflectionsSourav SahaPas encore d'évaluation
- Using Integration TablesDocument7 pagesUsing Integration TablesDagoberto de la FuentePas encore d'évaluation
- Kuliah1 2015Document36 pagesKuliah1 2015wiraPas encore d'évaluation
- Finite Difference ProofDocument7 pagesFinite Difference Proofsatish315kumarPas encore d'évaluation
- Math2800 ODE's IntroductionDocument31 pagesMath2800 ODE's Introductionleopard9987Pas encore d'évaluation
- Matlab Code 3Document29 pagesMatlab Code 3kthshlxyzPas encore d'évaluation
- Weatherwax - Conte - Solution - Manual Capitulo 2 y 3Document59 pagesWeatherwax - Conte - Solution - Manual Capitulo 2 y 3Jorge EstebanPas encore d'évaluation
- BTE 4225 Computer Simulation in Biological System: International Islamic University Malaysia Kulliyyah of EngineeringDocument12 pagesBTE 4225 Computer Simulation in Biological System: International Islamic University Malaysia Kulliyyah of EngineeringHana HamidPas encore d'évaluation
- Z TransformDocument28 pagesZ TransformmfchinPas encore d'évaluation
- Matlab For MA320Document14 pagesMatlab For MA320Shelly ChandlerPas encore d'évaluation
- GATE Mathematics Paper-2007Document11 pagesGATE Mathematics Paper-2007RajkumarPas encore d'évaluation
- Tre Ci Kolokvij Iz Matematike II 2009./2010.: R Diferencijabilna Funkcija Dviju Varijabli., yDocument8 pagesTre Ci Kolokvij Iz Matematike II 2009./2010.: R Diferencijabilna Funkcija Dviju Varijabli., yTARELIC1802Pas encore d'évaluation
- 5 Calculus VariationDocument13 pages5 Calculus VariationTan Jia En FeliciaPas encore d'évaluation
- Legendre PolynomialsDocument6 pagesLegendre PolynomialsFrancis Jr CastroPas encore d'évaluation
- Solutions To Exercises 7.1: X Has Period TDocument16 pagesSolutions To Exercises 7.1: X Has Period TTri Phương NguyễnPas encore d'évaluation
- Numerical Solution To Ordinary Differential EquationsDocument11 pagesNumerical Solution To Ordinary Differential EquationsLexzyrie Sybelle S. TolarbaPas encore d'évaluation
- Lecture 2 Linear First-Order PDEs PDFDocument7 pagesLecture 2 Linear First-Order PDEs PDFSrinivas JangiliPas encore d'évaluation
- Solution of Question No. 1Document6 pagesSolution of Question No. 1shaheer mustafaPas encore d'évaluation
- Potential Assignment MCEN90008 2016Document9 pagesPotential Assignment MCEN90008 2016Umar AshrafPas encore d'évaluation
- Chapter 4 - Solved Problems: Solutions To Solved Problem 4.1Document12 pagesChapter 4 - Solved Problems: Solutions To Solved Problem 4.1cilentPas encore d'évaluation
- Final Exam of Applied Linear Algebra - Math 270 April 19, 2011Document5 pagesFinal Exam of Applied Linear Algebra - Math 270 April 19, 2011Syed Murtaza RizviPas encore d'évaluation
- Sturm-Liouville Eigenvalue ProblemsDocument7 pagesSturm-Liouville Eigenvalue Problemshammoudeh13Pas encore d'évaluation
- MatodeDocument11 pagesMatodeVijayaraghavan GPas encore d'évaluation
- Simple Quadrature For Singular Integral Equations With Variable Coe CientsDocument20 pagesSimple Quadrature For Singular Integral Equations With Variable Coe CientsGloomsyPas encore d'évaluation
- A Tutorial On The Aitken Convergence AcceleratorDocument13 pagesA Tutorial On The Aitken Convergence AcceleratorPablo RodriguezPas encore d'évaluation
- Chapter 3. Polynomial Interpolation/Function ApproximationDocument11 pagesChapter 3. Polynomial Interpolation/Function ApproximationAnonymous 80p9OVPas encore d'évaluation
- Introduction and Setup: Mathematics 244: Lab 5 Trajectories in The Phase Plane Spring 2006Document4 pagesIntroduction and Setup: Mathematics 244: Lab 5 Trajectories in The Phase Plane Spring 2006Raqqasyi Rahmatullah MusafirPas encore d'évaluation
- Project 1Document5 pagesProject 1yvsreddyPas encore d'évaluation
- Wavelets 3Document29 pagesWavelets 3ac.diogo487Pas encore d'évaluation
- GATE Mathematics Paper 2011Document8 pagesGATE Mathematics Paper 2011RajkumarPas encore d'évaluation
- Solution 8Document22 pagesSolution 8Sigan ChenPas encore d'évaluation
- Differentialequations EC400 MT2013 PDFDocument20 pagesDifferentialequations EC400 MT2013 PDFAvijit PuriPas encore d'évaluation
- 10.Error-Evaluator: The Syndrome ComponentsDocument14 pages10.Error-Evaluator: The Syndrome Componentsisrael_zamora6389Pas encore d'évaluation
- Numerical Linear Algebra With MatlabDocument16 pagesNumerical Linear Algebra With MatlabOSBALDO1205Pas encore d'évaluation
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsD'EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsPas encore d'évaluation
- Elementary Differential Equations with Linear AlgebraD'EverandElementary Differential Equations with Linear AlgebraPas encore d'évaluation
- Transmutation and Operator Differential EquationsD'EverandTransmutation and Operator Differential EquationsPas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesD'EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesPas encore d'évaluation
- RA-080202 - PROFESSIONAL TEACHER - Secondary (Mathematics) - KORONADAL CITY - 10-2022Document39 pagesRA-080202 - PROFESSIONAL TEACHER - Secondary (Mathematics) - KORONADAL CITY - 10-2022Fretzie CambiadoPas encore d'évaluation
- CTS Company Profile Rev0Document11 pagesCTS Company Profile Rev0khalesnabilPas encore d'évaluation
- Iefem English Guide Reported Speech 3Document6 pagesIefem English Guide Reported Speech 3Laury Yocely Perea MenaPas encore d'évaluation
- Appendix A: Sample Plan A Vacation TableDocument3 pagesAppendix A: Sample Plan A Vacation TableChristian Xander LauretePas encore d'évaluation
- Session Nos. 26 - 31: Cities of Mandaluyong and PasigDocument25 pagesSession Nos. 26 - 31: Cities of Mandaluyong and PasigLego AlbertPas encore d'évaluation
- An Exploration of The Concept of Identity Crisis in Salman Rushdie's GrimusDocument3 pagesAn Exploration of The Concept of Identity Crisis in Salman Rushdie's GrimusIJELS Research JournalPas encore d'évaluation
- Unit 5Document3 pagesUnit 5api-665951284Pas encore d'évaluation
- Final Exam For EappDocument2 pagesFinal Exam For EappReychel NecorPas encore d'évaluation
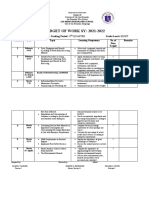
- BUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3Document2 pagesBUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3michelle dayritPas encore d'évaluation
- Rd6appspecDocument2 pagesRd6appspecravi00098Pas encore d'évaluation
- Sheree Hendersonresume 2Document3 pagesSheree Hendersonresume 2api-265774249Pas encore d'évaluation
- Updated References PDFDocument8 pagesUpdated References PDFFrancine Dawn MoloPas encore d'évaluation
- Đề Trung Học Thực Hành Đại Học Sư Phạm 2020-2021Document8 pagesĐề Trung Học Thực Hành Đại Học Sư Phạm 2020-2021Chi Vũ LinhPas encore d'évaluation
- Basic Science AssigDocument5 pagesBasic Science AssigdomromeoPas encore d'évaluation
- Contact Inform 2002 OldDocument22 pagesContact Inform 2002 OldBelajar PurboPas encore d'évaluation
- What Is Emergency Lighting Circuit DiagramDocument14 pagesWhat Is Emergency Lighting Circuit DiagramjackPas encore d'évaluation
- Foundations For Low Loss GRIN Fiber CouplingDocument16 pagesFoundations For Low Loss GRIN Fiber CouplingpsylabsPas encore d'évaluation
- Engineering Physics - PHY 1701 N. Punithavelan, Assistant Professor, Physics Division, VIT-ChennaiDocument6 pagesEngineering Physics - PHY 1701 N. Punithavelan, Assistant Professor, Physics Division, VIT-ChennaiRamyasai MunnangiPas encore d'évaluation
- h1 Styleclearboth Idcontentsection0the Only Guide To Commercial Fisheries Reviewh1jbfch PDFDocument14 pagesh1 Styleclearboth Idcontentsection0the Only Guide To Commercial Fisheries Reviewh1jbfch PDFgalleymark22Pas encore d'évaluation
- Solar Ifc ReportDocument40 pagesSolar Ifc ReportSIVA NAGA SUDHEER SIDDANIPas encore d'évaluation
- AS Level Mathematics Statistics (New)Document49 pagesAS Level Mathematics Statistics (New)Alex GoldsmithPas encore d'évaluation
- Scaffold 2Document3 pagesScaffold 2Mahmoud Elsayed MohamedPas encore d'évaluation
- Test - Reading Explorer 3 8A - QuizletDocument4 pagesTest - Reading Explorer 3 8A - QuizletTatjana Modea SibulPas encore d'évaluation
- Astm D2777 Determinacion de La Precision y El Sesgo PDFDocument21 pagesAstm D2777 Determinacion de La Precision y El Sesgo PDFAlvaro Pérez PérezPas encore d'évaluation
- Marine Ecosystem Restoration and Biodiversity OffsetDocument10 pagesMarine Ecosystem Restoration and Biodiversity OffsetMiriam TorresPas encore d'évaluation
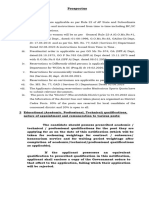
- Prospectus: 1 ReservationsDocument8 pagesProspectus: 1 ReservationsvarunPas encore d'évaluation
- دهانات الإيبوكسي الخالي من المذيب لخزانات ومواسير مياه الشرب-eDocument9 pagesدهانات الإيبوكسي الخالي من المذيب لخزانات ومواسير مياه الشرب-eabdelnasser hasanPas encore d'évaluation
- Abstract On Face Recognition TechnologyDocument1 pageAbstract On Face Recognition TechnologyParas Pareek60% (5)
- (J. García-Prada) Methodology To Characterize The Von Misses Stress in The Contact Between Wheel and Rail (Test-Rig)Document5 pages(J. García-Prada) Methodology To Characterize The Von Misses Stress in The Contact Between Wheel and Rail (Test-Rig)luigi12244Pas encore d'évaluation