Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Optimum Design of Honeycomb Sandwich StructuresDocument4 pagesOptimum Design of Honeycomb Sandwich StructuresShabbir AliPas encore d'évaluation
- 101+ Logo Design ResourcesDocument6 pages101+ Logo Design ResourcesÁlex Moreno60% (5)
- Control Systems Unit I NotesDocument55 pagesControl Systems Unit I NotesShabbir AliPas encore d'évaluation
- Wing and Tail Aerodynamic Properties Wing and Tail Aerodynamic Properties Wing and Tail Aerodyn Amic Properti ESDocument13 pagesWing and Tail Aerodynamic Properties Wing and Tail Aerodynamic Properties Wing and Tail Aerodyn Amic Properti ESShabbir Ali100% (1)
- Project Work File Format 2015-16Document24 pagesProject Work File Format 2015-16Shabbir AliPas encore d'évaluation
- Market Ke TrendDocument68 pagesMarket Ke TrendDemo AccountPas encore d'évaluation
- Introduction and Basic Concepts: (I) Historical Development and Model BuildingDocument18 pagesIntroduction and Basic Concepts: (I) Historical Development and Model Buildingslv_prasaadPas encore d'évaluation
- List of Holidays-2015Document2 pagesList of Holidays-2015Shabbir AliPas encore d'évaluation
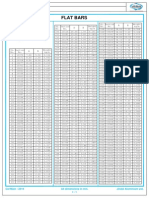
- 1) Flat Bars & Hexagonal BarDocument3 pages1) Flat Bars & Hexagonal BarShabbir AliPas encore d'évaluation
- Study Gap Affidavit: Board in The Year - With PCM - % & English - %Document1 pageStudy Gap Affidavit: Board in The Year - With PCM - % & English - %Shabbir AliPas encore d'évaluation
- E3Dv5 Assembly ManualDocument3 pagesE3Dv5 Assembly ManualShabbir AliPas encore d'évaluation
- M-Tech 2013 Computer Science EngineeringDocument25 pagesM-Tech 2013 Computer Science EngineeringShabbir AliPas encore d'évaluation
- Optimum Design of A Honeycomb Sandwich Beams & PanelsDocument1 pageOptimum Design of A Honeycomb Sandwich Beams & PanelsShabbir AliPas encore d'évaluation
- Engineering - Optimization Dec 2012Document1 pageEngineering - Optimization Dec 2012Shabbir AliPas encore d'évaluation
- Hash Based IndexingDocument23 pagesHash Based IndexingShabbir AliPas encore d'évaluation
- Compose ItDocument1 pageCompose ItShabbir AliPas encore d'évaluation
- Engineering Optimization Hw2 SolutionDocument17 pagesEngineering Optimization Hw2 SolutionShabbir AliPas encore d'évaluation
- As Lab Manual NewDocument70 pagesAs Lab Manual NewShabbir AliPas encore d'évaluation
- 010 - Chapter 3 - L7 - (02-10-2013)Document13 pages010 - Chapter 3 - L7 - (02-10-2013)Shabbir AliPas encore d'évaluation
- AVS 2 Mid BitsDocument20 pagesAVS 2 Mid BitsShabbir AliPas encore d'évaluation
- Concurrency Control and RecoveryDocument19 pagesConcurrency Control and RecoveryShabbir AliPas encore d'évaluation
- The Bare Basics: Storing Data On Disks and FilesDocument33 pagesThe Bare Basics: Storing Data On Disks and FilesRavi Kumar ReddyPas encore d'évaluation
- Academic Calendar 2014-15Document1 pageAcademic Calendar 2014-15simalaraviPas encore d'évaluation
- CFDDocument15 pagesCFDClemente SonPas encore d'évaluation
- JNTUH Convocation Process-UpdatedDocument8 pagesJNTUH Convocation Process-UpdatedbrtchPas encore d'évaluation
- Annex UreaDocument1 pageAnnex UreaavcschaudhariPas encore d'évaluation
- AerodynamicsDocument23 pagesAerodynamicsShabbir AliPas encore d'évaluation
- Aero Dynamics-I 2010Document8 pagesAero Dynamics-I 2010Shabbir AliPas encore d'évaluation
- Aircraft Performance NPTELDocument538 pagesAircraft Performance NPTELShabbir Ali100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Flood Modeling Prediction and Mitigation PDFDocument431 pagesFlood Modeling Prediction and Mitigation PDFgerardo hernandezPas encore d'évaluation
- 2016, TRiageDocument9 pages2016, TRiageaurelio casillasPas encore d'évaluation
- Construction Project CharterDocument2 pagesConstruction Project CharterKushagra SharmaPas encore d'évaluation
- Faulting and Seismic Zones of The PhilippinesDocument23 pagesFaulting and Seismic Zones of The PhilippinesAlskduiPas encore d'évaluation
- Professional EthicsDocument2 pagesProfessional Ethicsmanoj mahorePas encore d'évaluation
- NCM 113 Lecture Trans (Finals)Document9 pagesNCM 113 Lecture Trans (Finals)Jullia SollezaPas encore d'évaluation
- Practice Test 9 - 1Document9 pagesPractice Test 9 - 1Phuong DaoPas encore d'évaluation
- Local Faith Community (LFC) Children and Youths As Catalysts For Disaster Resilience: Experience Sharing From Pathfinders in IndonesiaDocument5 pagesLocal Faith Community (LFC) Children and Youths As Catalysts For Disaster Resilience: Experience Sharing From Pathfinders in IndonesiakyriakosePas encore d'évaluation
- SMSDocument228 pagesSMSemilemil11100% (1)
- Blast Resistant Design With Structural Steel PDFDocument6 pagesBlast Resistant Design With Structural Steel PDFMatthieuPas encore d'évaluation
- Is 800-2007Document150 pagesIs 800-2007Nagesh ThotaPas encore d'évaluation
- IT Audit ChecklistDocument90 pagesIT Audit ChecklistVishnuCholayil78% (9)
- The Philippines A Century HenceDocument5 pagesThe Philippines A Century HencezhayyyPas encore d'évaluation
- Seminar Report (Roll No. 143040044) - Structural Health Monitoring of Concrete StructuresDocument30 pagesSeminar Report (Roll No. 143040044) - Structural Health Monitoring of Concrete StructuresSouradeep Sen86% (7)
- Lesson Plan MESP - 1630327152Document21 pagesLesson Plan MESP - 1630327152HolySpirit StationFourteenPas encore d'évaluation
- Aci 5501R-01Document16 pagesAci 5501R-01JoseagushPas encore d'évaluation
- Sample Essay 1:: (Written by - Darwin Lesmana)Document4 pagesSample Essay 1:: (Written by - Darwin Lesmana)Nirra IndriiPas encore d'évaluation
- Disaster Nursing SAS Session 20Document5 pagesDisaster Nursing SAS Session 20Niceniadas CaraballePas encore d'évaluation
- Understanding TyphoonDocument43 pagesUnderstanding TyphoonJosene Mae Banang Maghari88% (8)
- Livelihoods - Key Concepts: 1 What Is A Livelihood?Document8 pagesLivelihoods - Key Concepts: 1 What Is A Livelihood?Bharat MishraPas encore d'évaluation
- SagaDocument13 pagesSagarashidkingPas encore d'évaluation
- MCMURDO E5 - SmartfindPlus - User ManualDocument52 pagesMCMURDO E5 - SmartfindPlus - User ManualANDREASBOULPas encore d'évaluation
- NSTP EssayDocument2 pagesNSTP EssayXiao ZhanPas encore d'évaluation
- Chapter 1 Research Paper in Civil EngineeringDocument9 pagesChapter 1 Research Paper in Civil EngineeringDave Khyl Josol BosquePas encore d'évaluation
- Siamese TragedyDocument3 pagesSiamese TragedydisthanPas encore d'évaluation
- DM Plan Ukhia Upazila Coxsbazar District - English Version-2014Document75 pagesDM Plan Ukhia Upazila Coxsbazar District - English Version-2014CDMP Bangladesh100% (4)
- HaitiDocument1 pageHaitiReshanth VangalapudiPas encore d'évaluation
- Steel Shield Temporary Fencing Risk Assessment and Method Statement For ErectionDocument7 pagesSteel Shield Temporary Fencing Risk Assessment and Method Statement For ErectionIrfan Prima AldiPas encore d'évaluation
- 2012 Hamlet Teacher's GuideDocument59 pages2012 Hamlet Teacher's GuideCalifornia Shakespeare Theater100% (7)
- Typhoon Ketsana in ManilaDocument12 pagesTyphoon Ketsana in ManilaHajira Anjum100% (1)