Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 1 KV 250 A 3150 Din 42530 67 3370221Document2 pages1 KV 250 A 3150 Din 42530 67 3370221Yigit SarıkayaPas encore d'évaluation
- Topic 3 BatteryDocument40 pagesTopic 3 BatterynisaPas encore d'évaluation
- Data Sheet (English) - 8036 Industrial ControlsDocument44 pagesData Sheet (English) - 8036 Industrial ControlsNabil ShaukatPas encore d'évaluation
- Digital Fabrication in Architecture PDFDocument192 pagesDigital Fabrication in Architecture PDFAndrada Iulia NeagPas encore d'évaluation
- SEPAM ProtectionDocument14 pagesSEPAM ProtectionYigit SarıkayaPas encore d'évaluation
- 36 KV 630 Din 42532 89 2606285Document1 page36 KV 630 Din 42532 89 2606285Yigit SarıkayaPas encore d'évaluation
- 7SR10 Argus FlyerDocument2 pages7SR10 Argus FlyerHoang EpuPas encore d'évaluation
- 7XG22 2RMLG Catalogue SheetDocument16 pages7XG22 2RMLG Catalogue SheetHtun SoePas encore d'évaluation
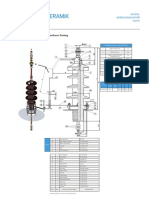
- 36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Document1 page36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Yigit SarıkayaPas encore d'évaluation
- Page 10 117: Bas耂c HTML Vers耂onDocument2 pagesPage 10 117: Bas耂c HTML Vers耂onYigit SarıkayaPas encore d'évaluation
- SL Ref542plus (En) A 1vcp000060Document63 pagesSL Ref542plus (En) A 1vcp000060Yigit SarıkayaPas encore d'évaluation
- MiCOM IDMT Curves CalculatorDocument2 pagesMiCOM IDMT Curves CalculatorYigit SarıkayaPas encore d'évaluation
- F0126405 PB OLTCsDocument24 pagesF0126405 PB OLTCsDEADMANPas encore d'évaluation
- Pac E100 Ayar KilavuzuDocument15 pagesPac E100 Ayar KilavuzuYigit Sarıkaya0% (1)
- GCRDocument2 pagesGCRYigit SarıkayaPas encore d'évaluation
- MiCOM IDMT Curves CalculatorDocument2 pagesMiCOM IDMT Curves CalculatorYigit SarıkayaPas encore d'évaluation
- Bushing PDFDocument92 pagesBushing PDFYigit SarıkayaPas encore d'évaluation
- High Power SwitchesDocument6 pagesHigh Power SwitchesYigit SarıkayaPas encore d'évaluation
- Terminal 01: External GridDocument2 pagesTerminal 01: External GridYigit SarıkayaPas encore d'évaluation
- DIgSILENT PDFDocument1 pageDIgSILENT PDFYigit SarıkayaPas encore d'évaluation
- Brosura PTE-100-C Plus 1Document1 pageBrosura PTE-100-C Plus 1Yigit SarıkayaPas encore d'évaluation
- Sepam Series 40 Protective Relays: User's ManualDocument256 pagesSepam Series 40 Protective Relays: User's ManualccrrzzPas encore d'évaluation
- Hint: User Name and Password Are Case SensitiveDocument1 pageHint: User Name and Password Are Case SensitiveYigit SarıkayaPas encore d'évaluation
- Products L3 Vac Contactors CPX CLX CBX V1 71016 enDocument2 pagesProducts L3 Vac Contactors CPX CLX CBX V1 71016 enYigit SarıkayaPas encore d'évaluation
- Friem Industry en 07 2010Document2 pagesFriem Industry en 07 2010Yigit SarıkayaPas encore d'évaluation
- Cat Comp D EngDocument3 pagesCat Comp D EngYigit SarıkayaPas encore d'évaluation
- Transformer BushingsDocument92 pagesTransformer BushingsYigit SarıkayaPas encore d'évaluation
- Promo Mors Smitt enDocument20 pagesPromo Mors Smitt enYigit SarıkayaPas encore d'évaluation
- Ac/Dc Converter: For The European Linear Particle Accelerator CERN Near GenevaDocument1 pageAc/Dc Converter: For The European Linear Particle Accelerator CERN Near GenevaYigit SarıkayaPas encore d'évaluation
- ErneuerbareEnergien PROSP enDocument8 pagesErneuerbareEnergien PROSP enYigit SarıkayaPas encore d'évaluation
- MT860 AngDocument2 pagesMT860 AngGuson KuntartoPas encore d'évaluation
- Bomb-280 enDocument2 pagesBomb-280 enYigit SarıkayaPas encore d'évaluation
- EW2.2 eDocument6 pagesEW2.2 eYigit SarıkayaPas encore d'évaluation
- Spiderman EvolutionDocument14 pagesSpiderman EvolutionLuis IvanPas encore d'évaluation
- Taoism: Michelle Azutea Lei Llabres Laurisse Anne Magpayo Juniel Tuazon Zaldy Bryan BajadaDocument26 pagesTaoism: Michelle Azutea Lei Llabres Laurisse Anne Magpayo Juniel Tuazon Zaldy Bryan Bajadana2than-1Pas encore d'évaluation
- Lesson 6 Intercultural ComDocument25 pagesLesson 6 Intercultural ComBrave MitraPas encore d'évaluation
- Professional Ethics in Human ValuesDocument25 pagesProfessional Ethics in Human Valuesdips03275% (4)
- The Old Calendarists: A Social Psychological Profile of A Greek Orthodox MinorityDocument9 pagesThe Old Calendarists: A Social Psychological Profile of A Greek Orthodox MinorityNilsonMarianoFilhoPas encore d'évaluation
- Legal Insights Issue 4 2018Document24 pagesLegal Insights Issue 4 2018Weicong TanPas encore d'évaluation
- Alternative Forms of BusOrgDocument16 pagesAlternative Forms of BusOrgnatalie clyde matesPas encore d'évaluation
- Orthogonal Curvilinear CoordinatesDocument16 pagesOrthogonal Curvilinear CoordinatesstriaukasPas encore d'évaluation
- NO KEY Synonyms-And-Antonyms-Describing-Character-Grammar-Drills-Wordsearches - 81561Document1 pageNO KEY Synonyms-And-Antonyms-Describing-Character-Grammar-Drills-Wordsearches - 81561Helena MariñoPas encore d'évaluation
- Law 431 Course Outline (Aug 22-23)Document3 pagesLaw 431 Course Outline (Aug 22-23)Precious OmphithetsePas encore d'évaluation
- Caldecott WinnersDocument1 pageCaldecott Winnersbenanas6Pas encore d'évaluation
- Introduction and Assessment of The Renal - Urological SystemDocument182 pagesIntroduction and Assessment of The Renal - Urological SystemValerie Suge-Michieka100% (1)
- Anatomy - Nervous System - Spinal Cord and Motor and Sensory PathwaysDocument43 pagesAnatomy - Nervous System - Spinal Cord and Motor and Sensory PathwaysYAMINIPRIYAN100% (1)
- Evaluation Sheet For RankingDocument6 pagesEvaluation Sheet For RankingSonny MatiasPas encore d'évaluation
- (2017) (Enfield) Distributed AgencyDocument305 pages(2017) (Enfield) Distributed Agencyjose100% (1)
- GRADE 11 Gen Math Inverse FunctionsDocument13 pagesGRADE 11 Gen Math Inverse FunctionsAiejhay Bordaje100% (1)
- International Accounting Standard 36 (IAS 36), Impairment of AssetsDocument10 pagesInternational Accounting Standard 36 (IAS 36), Impairment of AssetsMadina SabayevaPas encore d'évaluation
- River: A Boon or A BaneDocument3 pagesRiver: A Boon or A BaneIJELS Research JournalPas encore d'évaluation
- Opinion Essay: ECPE - Michigan Proficiency The (5) Types of ESSAYSDocument4 pagesOpinion Essay: ECPE - Michigan Proficiency The (5) Types of ESSAYSelpidavekriPas encore d'évaluation
- Anguyo Emmanuel Research ReportDocument51 pagesAnguyo Emmanuel Research ReportTendo PaulPas encore d'évaluation
- Yangkam WordlistDocument19 pagesYangkam Wordlistxdboy2006Pas encore d'évaluation
- Information Technology SECTORDocument2 pagesInformation Technology SECTORDACLUB IBSbPas encore d'évaluation
- Essay On NumbersDocument1 pageEssay On NumbersTasneem C BalindongPas encore d'évaluation
- Types of Drills PDFDocument8 pagesTypes of Drills PDFSummer nightsPas encore d'évaluation
- Chemical Engineering Science: N. Ratkovich, P.R. Berube, I. NopensDocument15 pagesChemical Engineering Science: N. Ratkovich, P.R. Berube, I. Nopensvasumalhotra2001Pas encore d'évaluation
- 25 - A Hard Days NightDocument2 pages25 - A Hard Days NightBruno GovernatoriPas encore d'évaluation
- Tutorial-Midterm - CHEM 1020 General Chemistry - IB - AnsDocument71 pagesTutorial-Midterm - CHEM 1020 General Chemistry - IB - AnsWing Chi Rainbow TamPas encore d'évaluation