Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Fabiola Cruz Lesson 4.1 - Electrons in Atoms - Light and Quantized EnergyDocument6 pagesFabiola Cruz Lesson 4.1 - Electrons in Atoms - Light and Quantized EnergyFabiola Cruz0% (1)
- Science - Satrun Voyager 1981 PDFDocument30 pagesScience - Satrun Voyager 1981 PDFLuis Romero100% (2)
- Irctcs E Ticketing Service Electronic Reservation Slip (Personal User)Document1 pageIrctcs E Ticketing Service Electronic Reservation Slip (Personal User)Prashanth ShyamalaPas encore d'évaluation
- Concepts Electro MDocument21 pagesConcepts Electro MPrashanth ShyamalaPas encore d'évaluation
- Easy ModDocument18 pagesEasy ModPrashanth ShyamalaPas encore d'évaluation
- SCORe CardDocument2 pagesSCORe CardPrashanth ShyamalaPas encore d'évaluation
- Tutorial 2Document2 pagesTutorial 2Prashanth Shyamala0% (1)
- Oregon SentinelDocument15 pagesOregon SentinelPrashanth ShyamalaPas encore d'évaluation
- Particle Size Analysis Cocoa PowdersDocument3 pagesParticle Size Analysis Cocoa PowdersAhmad S MohamadPas encore d'évaluation
- Modeling of Rotary Kiln in Cement IndustryDocument12 pagesModeling of Rotary Kiln in Cement IndustryFilipe FreirePas encore d'évaluation
- Heat and Mass TransferDocument31 pagesHeat and Mass TransferRavi RanePas encore d'évaluation
- WORKSHOPDocument9 pagesWORKSHOPManjunatha EikilaPas encore d'évaluation
- Batch Crystallizer Manual FDocument12 pagesBatch Crystallizer Manual FShoaib PathanPas encore d'évaluation
- Why Kinetics Is Very Important in PharmacyDocument13 pagesWhy Kinetics Is Very Important in PharmacyRavi KantPas encore d'évaluation
- Pile CapDocument5 pagesPile CapAzriel FirmansyahPas encore d'évaluation
- Lampiran 3. WPS of Pile JointDocument3 pagesLampiran 3. WPS of Pile JointDoni TriatmojoPas encore d'évaluation
- Photography - Depth of FieldDocument3 pagesPhotography - Depth of FieldmirnafarahatPas encore d'évaluation
- Comparison Between Edge and Screw DislocationDocument5 pagesComparison Between Edge and Screw DislocationAshok PradhanPas encore d'évaluation
- Kidde Fire Systems HPCO2 Component Description: Stop (Directional) Valves, 1/2-Inch Thru 2-InchDocument1 pageKidde Fire Systems HPCO2 Component Description: Stop (Directional) Valves, 1/2-Inch Thru 2-InchElemsa InstalacionesPas encore d'évaluation
- Project VTUDocument16 pagesProject VTUsameekshaPas encore d'évaluation
- Corrosion On Ships and Countermeasures - Dwidaya KorosindoDocument6 pagesCorrosion On Ships and Countermeasures - Dwidaya KorosindoMekinePas encore d'évaluation
- Motion Chp. NumericalsDocument6 pagesMotion Chp. NumericalsSatwik AroraPas encore d'évaluation
- Hydraulics LaboratoryDocument5 pagesHydraulics LaboratoryBernard PalmerPas encore d'évaluation
- Timber Ridge Beam Calculation Report 2Document5 pagesTimber Ridge Beam Calculation Report 2CartecSyriaPas encore d'évaluation
- CasingTables 2008Document53 pagesCasingTables 2008Timothy PopikPas encore d'évaluation
- EC201 (Rev) Tcm92 22934kompressDocument12 pagesEC201 (Rev) Tcm92 22934kompressJoe GoparPas encore d'évaluation
- H041612-00-GA TWC Assembly DWG Rev BDocument1 pageH041612-00-GA TWC Assembly DWG Rev BJitendra BhosalePas encore d'évaluation
- Env Law End TermDocument13 pagesEnv Law End TermSadhvi SinghPas encore d'évaluation
- TDLMultiCell 20Document2 pagesTDLMultiCell 20sapprjhPas encore d'évaluation
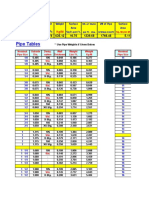
- Pipe Table For Smart EngineersDocument12 pagesPipe Table For Smart EngineersJade ClemenoPas encore d'évaluation
- Chemistry ProjectDocument18 pagesChemistry ProjectAPARNA GANGWARPas encore d'évaluation
- MDSP SET O3Document26 pagesMDSP SET O3BrilliantJohnMalandacRubiaPas encore d'évaluation
- Letter To Editor On The Effects of Climate Change On The EnvironmentDocument2 pagesLetter To Editor On The Effects of Climate Change On The EnvironmentKAYANNA LAWRENCEPas encore d'évaluation
- API Datasheet 101-PA-18 18ADocument1 pageAPI Datasheet 101-PA-18 18Arameshkarthik810Pas encore d'évaluation
- Modern Physics PDFDocument20 pagesModern Physics PDFkaushik247Pas encore d'évaluation