Vous aimerez peut-être aussi
- Levantamiento Por RadiaciónDocument20 pagesLevantamiento Por RadiaciónVASQUEZ CERQUIN LUIS ANGELPas encore d'évaluation
- Propiedades de Los RefrigerantesDocument18 pagesPropiedades de Los RefrigerantesJuan Escobar Rodriguez100% (1)
- Transmisión Hidrostática LindeDocument16 pagesTransmisión Hidrostática LindeLorenzo100% (1)
- Operaciones Proposicionales y Lenguaje Formal - ActividadDocument8 pagesOperaciones Proposicionales y Lenguaje Formal - ActividadDiego OrozcoPas encore d'évaluation
- Evaluacion de Expresiones AlgebraicasDocument15 pagesEvaluacion de Expresiones AlgebraicasSimombo Matematicando60% (10)
- Programación de Robots IDocument181 pagesProgramación de Robots IMaldito SudacaPas encore d'évaluation
- Seminario Subestaciones ElectricasDocument4 pagesSeminario Subestaciones ElectricasMaldito SudacaPas encore d'évaluation
- Gestion Mtto IndustrialDocument7 pagesGestion Mtto IndustrialMaldito SudacaPas encore d'évaluation
- Analisis de EstructurasDocument24 pagesAnalisis de EstructurasMaldito SudacaPas encore d'évaluation
- Sistemas ElectricosDocument4 pagesSistemas ElectricosMaguiña Polanco EricPas encore d'évaluation
- Trabajo Dinamica PDFDocument23 pagesTrabajo Dinamica PDFMaldito SudacaPas encore d'évaluation
- PEPP Instr Autom y CTRL Proc 2011Document7 pagesPEPP Instr Autom y CTRL Proc 2011Jun LeePas encore d'évaluation
- Gestion Del Mantto Equipo PesadoDocument7 pagesGestion Del Mantto Equipo Pesadojesusmcc100% (2)
- Máquinas Reales - Eficiencia MecanicaDocument13 pagesMáquinas Reales - Eficiencia MecanicaMaldito SudacaPas encore d'évaluation
- Horario Pedro DíazDocument1 pageHorario Pedro DíazMaldito SudacaPas encore d'évaluation
- Procesos InteligentesDocument8 pagesProcesos InteligentesMaldito SudacaPas encore d'évaluation
- Bombas de Slurry - Índice de Degradación Desgaste PromedioDocument2 pagesBombas de Slurry - Índice de Degradación Desgaste PromedioMaldito SudacaPas encore d'évaluation
- Historia Del MantenimientoDocument24 pagesHistoria Del MantenimientoMaldito SudacaPas encore d'évaluation
- Gestion y Distribucion de Plantas IndustrialesDocument8 pagesGestion y Distribucion de Plantas IndustrialesMaldito SudacaPas encore d'évaluation
- DinámicaDocument6 pagesDinámicaMaldito SudacaPas encore d'évaluation
- Redes y TeleprocesosDocument6 pagesRedes y TeleprocesosMaldito SudacaPas encore d'évaluation
- Maquinaria Industrial IIDocument8 pagesMaquinaria Industrial IIMaldito SudacaPas encore d'évaluation
- Administración, Diagnostico y Evaluación de Empresas IndustrialesDocument8 pagesAdministración, Diagnostico y Evaluación de Empresas IndustrialesMaldito SudacaPas encore d'évaluation
- Diseño de Un Brazo A Partir Del Principio de Una Pala Hidráulica y Mecánica - PaperDocument15 pagesDiseño de Un Brazo A Partir Del Principio de Una Pala Hidráulica y Mecánica - PaperMaldito SudacaPas encore d'évaluation
- Maquinaria Industrial IDocument8 pagesMaquinaria Industrial IMaldito SudacaPas encore d'évaluation
- Termodinámica IIDocument6 pagesTermodinámica IIMaldito SudacaPas encore d'évaluation
- Suministros EnergéticosDocument6 pagesSuministros EnergéticosMaldito SudacaPas encore d'évaluation
- Termodinámica IDocument6 pagesTermodinámica IMaldito SudacaPas encore d'évaluation
- Medidas EléctricasDocument3 pagesMedidas EléctricasMaldito SudacaPas encore d'évaluation
- Cronograma Examenes 2015 PARDocument6 pagesCronograma Examenes 2015 PARMaldito SudacaPas encore d'évaluation
- Redes y TeleprocesosDocument6 pagesRedes y TeleprocesosMaldito SudacaPas encore d'évaluation
- Diseño de Un Brazo A Partir Del Principio de Una Pala Hidráulica y MecánicaDocument20 pagesDiseño de Un Brazo A Partir Del Principio de Una Pala Hidráulica y MecánicaMaldito SudacaPas encore d'évaluation
- Diseño de Un Brazo A Partir Del Principio de Una Pala Hidráulica y Mecánica - InformeDocument41 pagesDiseño de Un Brazo A Partir Del Principio de Una Pala Hidráulica y Mecánica - InformeMaldito SudacaPas encore d'évaluation
- 2015 IMPAR - Cronograma - Examenes PDFDocument5 pages2015 IMPAR - Cronograma - Examenes PDFJhonathan Ever Meneses LopezPas encore d'évaluation
- Universidad Católica de Santa MaríaDocument2 pagesUniversidad Católica de Santa MaríaCristoval VargasPas encore d'évaluation
- Boe A 2023 15833Document2 486 pagesBoe A 2023 15833Jhonatan PacificoPas encore d'évaluation
- Reporte Practica 1Document12 pagesReporte Practica 1Rodea Azcona Erick AlbertoPas encore d'évaluation
- El TeodolitoDocument48 pagesEl TeodolitoYesseña Abegail33% (3)
- S4INGLES4TVDocument7 pagesS4INGLES4TVRosario JimenezPas encore d'évaluation
- Tabla de Caracticisticas Extrema PresionDocument1 pageTabla de Caracticisticas Extrema PresionGeorgePas encore d'évaluation
- Lista Cotejo MAPA CONCEPTUALDocument3 pagesLista Cotejo MAPA CONCEPTUALDaniel Torres JuárezPas encore d'évaluation
- Teorema de BayesDocument2 pagesTeorema de Bayesvice.cursosPas encore d'évaluation
- TEMA 4 - Fuentes de FinanciaciónDocument44 pagesTEMA 4 - Fuentes de FinanciaciónCora 76Pas encore d'évaluation
- 04 Innovacion y Competitividad Empresarial. Leonel Corona TrevinoDocument11 pages04 Innovacion y Competitividad Empresarial. Leonel Corona TrevinoJean Janssen Matos ManguinuriPas encore d'évaluation
- Prácticas de Laboratorio Fundamentos de Circuitos Eléctricos 2021BDocument42 pagesPrácticas de Laboratorio Fundamentos de Circuitos Eléctricos 2021BKAGGHGPas encore d'évaluation
- Accounting Alert BA VEN NIF 12 Fe de Errata PDFDocument9 pagesAccounting Alert BA VEN NIF 12 Fe de Errata PDFAndrés E. Salazar G.Pas encore d'évaluation
- Creativo PobreDocument2 pagesCreativo PobreDiego ValdezPas encore d'évaluation
- Syphon Filter The Omega StrainDocument18 pagesSyphon Filter The Omega StrainAlfredo ArenasPas encore d'évaluation
- Tecnicas para La Solucion de ProblemasDocument3 pagesTecnicas para La Solucion de ProblemasBeth OrioPas encore d'évaluation
- Tarea V de Etiqueta y ProtocoloDocument6 pagesTarea V de Etiqueta y ProtocoloMarfri Luko MoretaPas encore d'évaluation
- Aproximación de La Binomial Por La de PoissonDocument3 pagesAproximación de La Binomial Por La de PoissonMiguel OrdoñezPas encore d'évaluation
- Universidad Nacional Autonoma de Honduras.: Luis Andrés Pineda ZúnigaDocument5 pagesUniversidad Nacional Autonoma de Honduras.: Luis Andrés Pineda ZúnigaDarwin PinedaPas encore d'évaluation
- Analisis Del Expediente Tecnico SifonDocument4 pagesAnalisis Del Expediente Tecnico SifonOscar Deynard ChecyaPas encore d'évaluation
- Chapter 11 EspDocument17 pagesChapter 11 EspRudy Gil DíazPas encore d'évaluation
- MimeógrafoDocument5 pagesMimeógrafoSantiago GonzalesPas encore d'évaluation
- Ingreso Solicitud AuxuniDocument7 pagesIngreso Solicitud AuxuniAlvaro De la OssaPas encore d'évaluation
- Informe BlogDocument18 pagesInforme BlogMary JordanPas encore d'évaluation
- Hoja de Vida Estefania Guarin L PDFDocument7 pagesHoja de Vida Estefania Guarin L PDFestefa rodas rodasPas encore d'évaluation
- CISCODocument4 pagesCISCONatalia Suyon VenturaPas encore d'évaluation
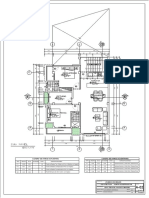
- Dormitorio: Cuadro de Vanos de PuertasDocument1 pageDormitorio: Cuadro de Vanos de PuertasManuel BazanPas encore d'évaluation