Vous aimerez peut-être aussi
- First Order OdeDocument43 pagesFirst Order OdeAkshat KhandelwalPas encore d'évaluation
- Be NG 2 Probst at Final 2009Document5 pagesBe NG 2 Probst at Final 2009AthinaPas encore d'évaluation
- First Order OdeDocument49 pagesFirst Order OdeKuma Ravelu100% (1)
- Bruker XRDSNB11 Stress&TextureDocument55 pagesBruker XRDSNB11 Stress&TexturethuronPas encore d'évaluation
- Polarimeter by MR - CharisDocument4 pagesPolarimeter by MR - CharisCharis Israel AnchaPas encore d'évaluation
- EM700p Advanced Engineering MathematicsDocument3 pagesEM700p Advanced Engineering MathematicsDHT845Pas encore d'évaluation
- AtKins Chapter 1Document57 pagesAtKins Chapter 1Ebook Download0% (1)
- Second-Order Differential Equations: A Second-Order Differential Equation Is Called Linear If It Can Be WrittenDocument33 pagesSecond-Order Differential Equations: A Second-Order Differential Equation Is Called Linear If It Can Be WrittenAaron MuellerPas encore d'évaluation
- Vdocuments - MX Differential Equations ManualDocument99 pagesVdocuments - MX Differential Equations ManualJohn Carlo TeodonesPas encore d'évaluation
- First Order Differential EquationsDocument7 pagesFirst Order Differential Equationsjhames09Pas encore d'évaluation
- O Level A Maths 2014 Paper 1Document9 pagesO Level A Maths 2014 Paper 1Lawrence Lim Ah KowPas encore d'évaluation
- Properties of Laplace Transform - Advance Engineering Mathematics ReviewDocument4 pagesProperties of Laplace Transform - Advance Engineering Mathematics Reviewcarl eliotPas encore d'évaluation
- CH 8 - Multiple IntegralsDocument48 pagesCH 8 - Multiple IntegralsSolewinnerPas encore d'évaluation
- First and Second Linear Order ODEDocument35 pagesFirst and Second Linear Order ODEImam MumtazPas encore d'évaluation
- Partial DifferentiationDocument8 pagesPartial DifferentiationAmirah NasirPas encore d'évaluation
- Formulas For Derivatives and IntegralsDocument1 pageFormulas For Derivatives and IntegralsAcapSuiPas encore d'évaluation
- 24 First Order Diff Eqs: (Great For Differential Equations Students, #Diffeqmarathon)Document3 pages24 First Order Diff Eqs: (Great For Differential Equations Students, #Diffeqmarathon)Cedrixe MadridPas encore d'évaluation
- WEEK 7 3 5 Variation of Parameters To Find A Particular Solution 3 6 Cauchy Euler Differential EquationsDocument19 pagesWEEK 7 3 5 Variation of Parameters To Find A Particular Solution 3 6 Cauchy Euler Differential EquationsMaryem ZubairPas encore d'évaluation
- Differential Equations - Solved Assignments - Semester Fall 2007Document38 pagesDifferential Equations - Solved Assignments - Semester Fall 2007Muhammad UmairPas encore d'évaluation
- Answers To Test Yourself Questions: Topic 8Document7 pagesAnswers To Test Yourself Questions: Topic 8Abel CruzPas encore d'évaluation
- Calculus Better Explained 2018-1Document324 pagesCalculus Better Explained 2018-1mashimbyewf100% (2)
- 8.indefinite IntegrationExerciseDocument46 pages8.indefinite IntegrationExerciseDina KoutonPas encore d'évaluation
- Chapter 6 (Integration Techniques) : DX X XDocument27 pagesChapter 6 (Integration Techniques) : DX X XArap DomPas encore d'évaluation
- Ordinary Differential EquationDocument13 pagesOrdinary Differential EquationMich LadycanPas encore d'évaluation
- Method of Undetermined Coefficients, Variation of Parameters, SuperpositionDocument16 pagesMethod of Undetermined Coefficients, Variation of Parameters, SuperpositionKhyzer HayyatPas encore d'évaluation
- 2012 JC1 Promo RevisionDocument477 pages2012 JC1 Promo RevisionVincent SeePas encore d'évaluation
- AodDocument41 pagesAodAditya BansalPas encore d'évaluation
- Eee Formula Sheet PDFDocument143 pagesEee Formula Sheet PDFKiran Patil0% (1)
- Exact Equations Notes 3Document19 pagesExact Equations Notes 3CARLO JEMBO JAMAGO LABISPas encore d'évaluation
- Atkins Chapter07.Lect02Document11 pagesAtkins Chapter07.Lect02Qisthy Hanifati HazrinaPas encore d'évaluation
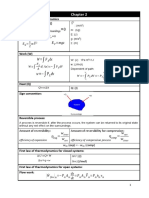
- Chapter 2 FormulasDocument6 pagesChapter 2 FormulasShellyPas encore d'évaluation
- O Level Maths Notes (Quadratic Formula)Document1 pageO Level Maths Notes (Quadratic Formula)Love Peace HarmonyPas encore d'évaluation
- Experiment 2. Vapor Pressure.Document4 pagesExperiment 2. Vapor Pressure.Esmeralda A OcampoPas encore d'évaluation
- Mixing ProblemDocument28 pagesMixing ProblemAllen Castor50% (2)
- Riccati EquationDocument4 pagesRiccati Equationletter_ashish4444Pas encore d'évaluation
- Study at NTU 2022 - 23Document16 pagesStudy at NTU 2022 - 23MarcPas encore d'évaluation
- Undetermined CoefficientsDocument3 pagesUndetermined CoefficientsPawee RamasPas encore d'évaluation
- Chapter 3 - Multiple IntegralDocument56 pagesChapter 3 - Multiple IntegralTuan Jalai100% (1)
- Differential Equations - Linear Differential Equations - 2 PDFDocument26 pagesDifferential Equations - Linear Differential Equations - 2 PDFRicky PerezPas encore d'évaluation
- Organic Chemistry-I Reactive Intermeditate - Carbo Cation, Carbanion, Free Radicals and Carbenes.Document29 pagesOrganic Chemistry-I Reactive Intermeditate - Carbo Cation, Carbanion, Free Radicals and Carbenes.boopathi_chemist3628Pas encore d'évaluation
- W4 Applications of First Order Differential Equations - ModuleDocument6 pagesW4 Applications of First Order Differential Equations - ModuleRaison MichPas encore d'évaluation
- Problems Differential EquationsDocument121 pagesProblems Differential EquationsRazes50% (4)
- Differentiation FormulasDocument1 pageDifferentiation Formulasslipper_crazy5335Pas encore d'évaluation
- 13.4 Green's TheoremDocument8 pages13.4 Green's TheoremDaniel Gaytan-JenkinsPas encore d'évaluation
- Bruker Wli Sop - Nt9100Document2 pagesBruker Wli Sop - Nt9100gopa99Pas encore d'évaluation
- Integration Using Algebraic SolutionDocument6 pagesIntegration Using Algebraic SolutionAANPas encore d'évaluation
- NJC Differential Equation Lecture Notes Teachers EditionDocument15 pagesNJC Differential Equation Lecture Notes Teachers EditionbhimabiPas encore d'évaluation
- Empirical and Molecular Formulae WorksheetDocument3 pagesEmpirical and Molecular Formulae WorksheetJohnclyde Ferry100% (1)
- Chapter 5 Eigenvalues and EigenvectorsDocument50 pagesChapter 5 Eigenvalues and EigenvectorsJulius100% (1)
- Bond Energy Worksheet: 3. What Do You Notice?Document4 pagesBond Energy Worksheet: 3. What Do You Notice?Leo LiuPas encore d'évaluation
- Differential Equations Class 12 Notes and Important QuestionsDocument7 pagesDifferential Equations Class 12 Notes and Important QuestionsNarinder KumarPas encore d'évaluation
- Transformation of Functions MsDocument4 pagesTransformation of Functions MssalmasomaPas encore d'évaluation
- Engineering Mathematics Ii MA-2001: Dr. Umber SheikhDocument66 pagesEngineering Mathematics Ii MA-2001: Dr. Umber Sheikhaswar teknikPas encore d'évaluation
- Math3B TrigIntegrals SolutionsDocument8 pagesMath3B TrigIntegrals SolutionsZander Rein FernandezPas encore d'évaluation
- 1.1 Definitions and TerminologyDocument9 pages1.1 Definitions and TerminologyIzzati KamalPas encore d'évaluation
- Tut-sheet-2-PHL120-13 With Final Answers PDFDocument2 pagesTut-sheet-2-PHL120-13 With Final Answers PDFjgrgpt33Pas encore d'évaluation
- A Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsD'EverandA Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsPas encore d'évaluation
- Chapter 02 2nd-Order Linear ODEsDocument18 pagesChapter 02 2nd-Order Linear ODEsSider HsiaoPas encore d'évaluation
- Build The Amazing FET Cir Clot RonDocument14 pagesBuild The Amazing FET Cir Clot RonDHT845Pas encore d'évaluation
- EM703p Higher Order Linear ODEsDocument10 pagesEM703p Higher Order Linear ODEsDHT845Pas encore d'évaluation
- EM701p First-Order Ordinary Differential EquationsDocument31 pagesEM701p First-Order Ordinary Differential EquationsDHT845Pas encore d'évaluation
- EM700p Advanced Engineering MathematicsDocument3 pagesEM700p Advanced Engineering MathematicsDHT845Pas encore d'évaluation
- IndexDocument52 pagesIndexDHT845Pas encore d'évaluation
- RDH Radiotron Designer's Handbook TocDocument32 pagesRDH Radiotron Designer's Handbook TocDHT845Pas encore d'évaluation
- MultidisciplinaryDocument20 pagesMultidisciplinaryrabiaPas encore d'évaluation
- Anya Detonnancourt - Student Filmmaker ReflectionsDocument2 pagesAnya Detonnancourt - Student Filmmaker Reflectionsapi-550252062Pas encore d'évaluation
- Mercado Vs Manzano Case DigestDocument3 pagesMercado Vs Manzano Case DigestalexparungoPas encore d'évaluation
- Isl Isl StyleguideDocument50 pagesIsl Isl StyleguideCole FranklinPas encore d'évaluation
- Exercises 2Document7 pagesExercises 2Taseen Junnat SeenPas encore d'évaluation
- A Beginner's Guide To Reading Jung - Jungian Center For The Spiritual SciencesDocument6 pagesA Beginner's Guide To Reading Jung - Jungian Center For The Spiritual SciencesRosa ChacónPas encore d'évaluation
- 07 Indian WeddingDocument2 pages07 Indian WeddingNailah Al-FarafishahPas encore d'évaluation
- Stdy RhrupDocument331 pagesStdy RhrupSugesan SmileyPas encore d'évaluation
- Knee Jerk Libertarianism by Frank Van DunnDocument9 pagesKnee Jerk Libertarianism by Frank Van DunnLuis Eduardo Mella GomezPas encore d'évaluation
- Maxima Book Chapter 4Document43 pagesMaxima Book Chapter 4prakush_prakushPas encore d'évaluation
- The Relationship Between Emotional Intelligence and Job Performance of Myanmar School TeachersDocument16 pagesThe Relationship Between Emotional Intelligence and Job Performance of Myanmar School TeachersAmadeus Fernando M. PagentePas encore d'évaluation
- O Level Physics QuestionsDocument9 pagesO Level Physics QuestionsMichael Leung67% (3)
- Aron Nimzowitsch-My System & Chess Praxis-New in Chess (2016) PDFDocument1 029 pagesAron Nimzowitsch-My System & Chess Praxis-New in Chess (2016) PDFMomin Fayzan100% (9)
- Vampire Lord Strategy - FinalDocument8 pagesVampire Lord Strategy - FinalMarco RadiciPas encore d'évaluation
- Abella vs. CSCDocument17 pagesAbella vs. CSCRocky Diente SenupePas encore d'évaluation
- Sonali IF CommodityDocument22 pagesSonali IF CommoditySonali DhimmarPas encore d'évaluation
- NO KEY Synonyms-And-Antonyms-Describing-Character-Grammar-Drills-Wordsearches - 81561Document1 pageNO KEY Synonyms-And-Antonyms-Describing-Character-Grammar-Drills-Wordsearches - 81561Helena MariñoPas encore d'évaluation
- Chapter 9Document35 pagesChapter 9Cameron LeishmanPas encore d'évaluation
- 4 Modes Operations RC4Document37 pages4 Modes Operations RC4Komal BansalPas encore d'évaluation
- Devi Strotam PDFDocument9 pagesDevi Strotam PDFDiary Of A Wise ManPas encore d'évaluation
- Dwnload Full Social Psychology 4th Edition Gilovich Test Bank PDFDocument35 pagesDwnload Full Social Psychology 4th Edition Gilovich Test Bank PDFalilonghidotardlyq71i7f100% (8)
- CONTARE Notes and ReviewerDocument4 pagesCONTARE Notes and ReviewerApong VillegasPas encore d'évaluation
- Question Bank of Financial Management - 2markDocument16 pagesQuestion Bank of Financial Management - 2marklakkuMSPas encore d'évaluation
- 1.CH 211 IntraductionDocument13 pages1.CH 211 IntraductionCarlos BuchwaPas encore d'évaluation
- Graph Theory and ApplicationsDocument45 pagesGraph Theory and Applicationssubramanyam62Pas encore d'évaluation
- DapusDocument2 pagesDapusIneke PutriPas encore d'évaluation
- IIT JEE Maths Mains 2000Document3 pagesIIT JEE Maths Mains 2000Ayush SharmaPas encore d'évaluation
- The Mind-Body ProblemDocument6 pagesThe Mind-Body ProblemCarlos Mendez PerezPas encore d'évaluation
- Project (Ravi Saxena) 2 PDFDocument11 pagesProject (Ravi Saxena) 2 PDFVishal SaxenaPas encore d'évaluation
- The AmazonsDocument18 pagesThe AmazonsJoan Grace Laguitan100% (1)