Vous aimerez peut-être aussi
- Lab2 MotorControl 08Document18 pagesLab2 MotorControl 08ĐạiDương100% (1)
- Isolated Power Supply 30wDocument43 pagesIsolated Power Supply 30wchinnadurai20006034100% (1)
- PosterDocument2 pagesPostervic_silva100% (1)
- DC Motor Control Using CDocument6 pagesDC Motor Control Using Cankitguptaims100% (2)
- Embedded System: From Wikipedia, The Free EncyclopediaDocument12 pagesEmbedded System: From Wikipedia, The Free EncyclopediaAndrei Ursac100% (1)
- Tinytile Product Brief Feb2017Document1 pageTinytile Product Brief Feb2017ajoaomv100% (1)
- Simple Icom CI-V InterfaceDocument2 pagesSimple Icom CI-V InterfaceMike100% (1)
- Pic-Web Development Board Users Manual: Rev.A, July 2008Document14 pagesPic-Web Development Board Users Manual: Rev.A, July 2008darazzi100% (1)
- TC8129CKWDocument17 pagesTC8129CKWVukica Ivic100% (1)
- Introdution To The DsPIC30FDocument17 pagesIntrodution To The DsPIC30Fboyluca100% (1)
- 1KM Power FM TransmitterDocument5 pages1KM Power FM TransmitterAntonio José Montaña Pérez de Cristo100% (1)
- Implementing A Bootloader For The PIC16F87X: OperationDocument24 pagesImplementing A Bootloader For The PIC16F87X: Operationboslim1580100% (1)
- FPGA Implementation of RS232 To Universal Serial Bus ConverterDocument6 pagesFPGA Implementation of RS232 To Universal Serial Bus Converterchaitanya s100% (1)
- Understanding Modern ElectronicsDocument3 pagesUnderstanding Modern ElectronicsNarayana Mugalur100% (1)
- 8-Bit PIC® MicrocontrollersDocument12 pages8-Bit PIC® Microcontrollersகாஸ்ட்ரோ சின்னா100% (1)
- LCD 16 X 2Document9 pagesLCD 16 X 2Pradeev Balakrishnan100% (1)
- USB Solutions: Robust USB Portfolio Including Support For USB-C™ and Power DeliveryDocument12 pagesUSB Solutions: Robust USB Portfolio Including Support For USB-C™ and Power DeliveryCasan No100% (1)
- MM53200 Encoder Decoder Application GuideDocument6 pagesMM53200 Encoder Decoder Application Guidekurtm22100% (1)
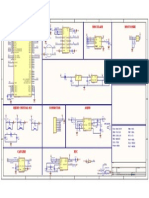
- Can Bus SCHDocument1 pageCan Bus SCHhoangdai100% (3)
- Adc Pic18f452Document8 pagesAdc Pic18f452Muhammad Ummair100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- Embedded SystemsDocument27 pagesEmbedded Systemsnavneet100% (1)
- 20090525021407ury0q9 (HAC-UAN480 Data RF Module)Document17 pages20090525021407ury0q9 (HAC-UAN480 Data RF Module)Agung Duemilanove100% (3)
- Pic Based PLCDocument21 pagesPic Based PLCWaqas Maqsud100% (1)
- How USB Works: A Concise Guide to the Universal Serial BusDocument7 pagesHow USB Works: A Concise Guide to the Universal Serial Bus123.shalini100% (1)
- Serial CommunicationsDocument23 pagesSerial CommunicationsPhuoc Trung Tran100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- Motor StepperDocument4 pagesMotor Stepperfavour ukpai100% (1)
- By Marl Us: Lighting The Right To TheDocument7 pagesBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- Introduction To SpiDocument21 pagesIntroduction To SpiDivya Priyadharshini M100% (1)
- Basics of SPI Communication ProtocolDocument19 pagesBasics of SPI Communication ProtocolNEETHU PRAKASH100% (1)
- USART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherDocument4 pagesUSART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherMohamed Ashraf100% (1)
- Design and Implementation of Uart Serial Communication ProtocolDocument35 pagesDesign and Implementation of Uart Serial Communication Protocolpinky2810100% (2)
- Pic TCP Ip StackDocument94 pagesPic TCP Ip StackHania Umar100% (1)
- We First Discuss The Universal Synchronous Asynchronous Receive Transmit (USART) ProtocolDocument58 pagesWe First Discuss The Universal Synchronous Asynchronous Receive Transmit (USART) Protocolsuraj singh100% (1)
- Brushless DC Electric Motor Control by CPLDDocument6 pagesBrushless DC Electric Motor Control by CPLDIonela100% (3)
- USB to RS232 Converter Using Atmel MicrocontrollersDocument4 pagesUSB to RS232 Converter Using Atmel MicrocontrollersNugraha Indrawan100% (2)
- Timer/Counter Configuration for LED BlinkingDocument96 pagesTimer/Counter Configuration for LED BlinkingAgung Prastyo100% (1)
- Embedded ARM Starter KitDocument3 pagesEmbedded ARM Starter KitEmblitz Rajajinagar100% (2)
- PIC Programming Module USB and Traffic Light System ControllerDocument26 pagesPIC Programming Module USB and Traffic Light System ControllerJosh, LRT100% (1)
- Loaders and Linkers Chapter 3 OverviewDocument36 pagesLoaders and Linkers Chapter 3 Overviewckakorot92100% (1)
- MICROCHIPDocument20 pagesMICROCHIPHector David100% (1)
- Industrial Electronics Document Explains How DIACs and Triacs Work for Phase Control ApplicationsDocument15 pagesIndustrial Electronics Document Explains How DIACs and Triacs Work for Phase Control ApplicationsFrancis Valdez Lopez100% (1)
- LPC P2148Document19 pagesLPC P2148Sharath Babu100% (1)
- Serial Communication - Usart, Uart, Rs232, Usb, Spi, I2c, TTLDocument1 pageSerial Communication - Usart, Uart, Rs232, Usb, Spi, I2c, TTLvedhh100% (2)
- DMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalDocument6 pagesDMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalharinik7100% (1)
- I2C Interface To Serial EEPROMDocument8 pagesI2C Interface To Serial EEPROMShri Kulkarni100% (1)
- Micro Smart ManualDocument455 pagesMicro Smart ManualJuan Carlos100% (1)
- Pic18 Interrupt 2Document19 pagesPic18 Interrupt 2adamwaiz100% (3)
- Pic 18 1Document2 pagesPic 18 1alpesh100% (1)
- Introduction To Embedded SystemsDocument33 pagesIntroduction To Embedded Systemscharanpreetg1100% (1)
- 9-Serial Comm (Autosaved)Document48 pages9-Serial Comm (Autosaved)M ADNAN Z100% (1)
- Newbie's Guide To AVR TimersDocument23 pagesNewbie's Guide To AVR TimersNitish Kumar100% (1)
- Fully Integrated On-Chip Switched Capacitor DC-DC ConvertersDocument136 pagesFully Integrated On-Chip Switched Capacitor DC-DC ConvertersasamarahPas encore d'évaluation
- Three Phase 500W Inverter As An Induction Motor Drive: by Duke Gray Nathan Brown Quasar HamiraniDocument18 pagesThree Phase 500W Inverter As An Induction Motor Drive: by Duke Gray Nathan Brown Quasar HamiraniJerry PendergraftPas encore d'évaluation
- BLDC Motor Open Loop ControlDocument20 pagesBLDC Motor Open Loop ControlShiva SuryaPas encore d'évaluation
- EE198B - Wireless Battery Charger PDFDocument21 pagesEE198B - Wireless Battery Charger PDFV'nod Rathode BPas encore d'évaluation
- A6 - Three Phase Inverter PDFDocument40 pagesA6 - Three Phase Inverter PDFPedro Carvalho100% (2)
- InverterDocument31 pagesInverterĐẹp PhanPas encore d'évaluation
- Design and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)Document23 pagesDesign and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)uzair aminPas encore d'évaluation
- Buget and Accountability GuidelinesDocument2 pagesBuget and Accountability GuidelinesSamuel MushakaPas encore d'évaluation
- Complex Analysis Christer BennewitzDocument116 pagesComplex Analysis Christer BennewitzDivy ChhayaPas encore d'évaluation
- Electrical Design and CostingDocument4 pagesElectrical Design and CostingSamuel MushakaPas encore d'évaluation
- Lect 2Document6 pagesLect 2Samuel MushakaPas encore d'évaluation
- Cellular NetworksDocument60 pagesCellular NetworksT FPas encore d'évaluation
- CCVT Transients Revisited - ABBDocument13 pagesCCVT Transients Revisited - ABBwas00266100% (1)
- CSC23 CH 4Document23 pagesCSC23 CH 4Samuel MushakaPas encore d'évaluation
- Project DTMFDocument34 pagesProject DTMFSamuel MushakaPas encore d'évaluation
- Cellular NetworksDocument60 pagesCellular NetworksT FPas encore d'évaluation
- Kabale University Quality Assurance GuidelinesDocument3 pagesKabale University Quality Assurance GuidelinesSamuel MushakaPas encore d'évaluation
- Ewb 2013Document3 pagesEwb 2013Samuel MushakaPas encore d'évaluation
- IEEE9 Model Documentation R0Document13 pagesIEEE9 Model Documentation R0Nando LópezPas encore d'évaluation
- Mini Electronic Voting Machine GuideDocument51 pagesMini Electronic Voting Machine GuideKiran RakshithPas encore d'évaluation
- Kabale University Quality Assurance GuidelinesDocument3 pagesKabale University Quality Assurance GuidelinesSamuel MushakaPas encore d'évaluation
- Notes18 TransformersDocument64 pagesNotes18 TransformersSamuel MushakaPas encore d'évaluation
- GLV - Drum Filter (PGS) LR PDFDocument8 pagesGLV - Drum Filter (PGS) LR PDFSamuel MushakaPas encore d'évaluation
- Chapter 12: Three-Phase Transformers: 10/13/2003 Electromechanical Dynamics 1Document15 pagesChapter 12: Three-Phase Transformers: 10/13/2003 Electromechanical Dynamics 1Berthy EtonePas encore d'évaluation
- 30 LED ProjectsDocument60 pages30 LED ProjectsfrioycalorPas encore d'évaluation
- Mvs Sve Chapter02Document32 pagesMvs Sve Chapter02Muhamad HassanPas encore d'évaluation
- Funda Electrical Tech.Document20 pagesFunda Electrical Tech.Samuel MushakaPas encore d'évaluation
- 2n2222a PDFDocument5 pages2n2222a PDFSamuel MushakaPas encore d'évaluation
- Singh Biofuels 1Document12 pagesSingh Biofuels 1nangkarak8201Pas encore d'évaluation
- Eagle TutorialDocument9 pagesEagle TutorialSamuel MushakaPas encore d'évaluation
- Poetic DevicesDocument9 pagesPoetic Devicesapi-262266786100% (1)
- InTech-Cassava Bioethanol PDFDocument31 pagesInTech-Cassava Bioethanol PDFSamuel MushakaPas encore d'évaluation
- Poetic DevicesDocument9 pagesPoetic Devicesapi-262266786100% (1)
- Stanley D PDFDocument7 pagesStanley D PDFSamuel MushakaPas encore d'évaluation
- Production of Ethanol From Cassava StarchDocument2 pagesProduction of Ethanol From Cassava StarchSamuel MushakaPas encore d'évaluation
- 2 PBDocument6 pages2 PBSamuel MushakaPas encore d'évaluation
- Hive Cleaning and SterilisationDocument12 pagesHive Cleaning and SterilisationSamuel MushakaPas encore d'évaluation