Vous aimerez peut-être aussi
- Sitara Boot Camp 10 Uboot Linux Kernel Board PortDocument110 pagesSitara Boot Camp 10 Uboot Linux Kernel Board PortP MPas encore d'évaluation
- Introduction To Embedded LinuxDocument89 pagesIntroduction To Embedded Linuxsalman shariffPas encore d'évaluation
- Hacking Windows CeDocument29 pagesHacking Windows Cemaq213Pas encore d'évaluation
- Boot Camp Local 20120904 v1Document138 pagesBoot Camp Local 20120904 v1anniyanPas encore d'évaluation
- Building Embedded LinuxDocument26 pagesBuilding Embedded Linux21151500Pas encore d'évaluation
- Introduction and Details of Embedded Linux Platform Developer Training CourseDocument7 pagesIntroduction and Details of Embedded Linux Platform Developer Training CourseVedaSolutionsPas encore d'évaluation
- Hands On Opencl: Created by Simon Mcintosh-Smith and Tom DeakinDocument258 pagesHands On Opencl: Created by Simon Mcintosh-Smith and Tom DeakinLinh NguyenPas encore d'évaluation
- Ch2 BootloaderDocument42 pagesCh2 BootloaderKather Rafi IbrahimPas encore d'évaluation
- XilinxDocument107 pagesXilinxmarkostankoPas encore d'évaluation
- Introduction to Sitara Linux SDKDocument39 pagesIntroduction to Sitara Linux SDKEdson GarridoPas encore d'évaluation
- VHDL Quartus II LED Project & Combinational LogicDocument34 pagesVHDL Quartus II LED Project & Combinational LogicDaniaPas encore d'évaluation
- Porting Linux: Embedded Linux Conference (Europe)Document48 pagesPorting Linux: Embedded Linux Conference (Europe)satoni12Pas encore d'évaluation
- Porting U-Boot and Linux To T4240Document11 pagesPorting U-Boot and Linux To T4240m3y54mPas encore d'évaluation
- Microblaze Linux: Using An FPGA-based Processor Is: Very Intelligent Very Stupid Don't KnowDocument53 pagesMicroblaze Linux: Using An FPGA-based Processor Is: Very Intelligent Very Stupid Don't Knowgaurav311086Pas encore d'évaluation
- Linux DriverDocument31 pagesLinux DriverTrạngPas encore d'évaluation
- Embedded Linux WorkshopsDocument6 pagesEmbedded Linux WorkshopsAadhi BotlaguntaPas encore d'évaluation
- U-Boot-v2: A Bootloader for Kernel HackersDocument36 pagesU-Boot-v2: A Bootloader for Kernel HackersshashikanthPas encore d'évaluation
- I.mx Linux User's GuideDocument56 pagesI.mx Linux User's GuideVageesh KM100% (1)
- Xenomai On NIOS II Softcore Processor Guide-V1.2Document31 pagesXenomai On NIOS II Softcore Processor Guide-V1.2Lalit BhatiPas encore d'évaluation
- Introduction & Update: UEFI Spring Plugfest - May 8-10, 2012 Andrew N. Sloss (ARM)Document26 pagesIntroduction & Update: UEFI Spring Plugfest - May 8-10, 2012 Andrew N. Sloss (ARM)Rajesh raviPas encore d'évaluation
- Week 4Document89 pagesWeek 4abbazh rakhondePas encore d'évaluation
- U Bootdoc PDFDocument13 pagesU Bootdoc PDFDineshkumarparamesPas encore d'évaluation
- P51 - Lab 1, Introduction To Netfpga: DR Noa Zilberman Lent, 2018/19Document15 pagesP51 - Lab 1, Introduction To Netfpga: DR Noa Zilberman Lent, 2018/19Yatheesh KaggerePas encore d'évaluation
- Real Time Operating System IIDocument25 pagesReal Time Operating System IIsrgperumalPas encore d'évaluation
- Embedded Linux Workshop On Blueboard-AT91: B. Vasu DevDocument30 pagesEmbedded Linux Workshop On Blueboard-AT91: B. Vasu DevJOHNSON JOHNPas encore d'évaluation
- DES-N1973 Hands-On Workshop Master Development On The LPCXpresso Toolchain With Our LPCOpen Development KitDocument125 pagesDES-N1973 Hands-On Workshop Master Development On The LPCXpresso Toolchain With Our LPCOpen Development Kitmagnum1966Pas encore d'évaluation
- The Universal Boot Loader ("Das U Boot") : Table of ContentsDocument13 pagesThe Universal Boot Loader ("Das U Boot") : Table of ContentsRamesh Ramasamy100% (2)
- 15 - Low Layer Library - Init Functions - 2pagesDocument15 pages15 - Low Layer Library - Init Functions - 2pagesjean-christophe ToussaintPas encore d'évaluation
- Firewall Lab SessionDocument31 pagesFirewall Lab SessionRohan KatariaPas encore d'évaluation
- Vlsi ppts1-1Document63 pagesVlsi ppts1-1naveensilveriPas encore d'évaluation
- Ubuntu On Zedboard Tutorial v14.4 01Document92 pagesUbuntu On Zedboard Tutorial v14.4 01Muhammad Qasim RaufPas encore d'évaluation
- ELT048 - Embedded Operational Systems: Rodrigo Maximiano Antunes de Almeida @rmaalmeida Universidade Federal de ItajubáDocument150 pagesELT048 - Embedded Operational Systems: Rodrigo Maximiano Antunes de Almeida @rmaalmeida Universidade Federal de Itajubánelson_herreraPas encore d'évaluation
- MicroBlaze EDK TutorialDocument69 pagesMicroBlaze EDK Tutorialsreedhar_vkPas encore d'évaluation
- Mychaela Falconia (She/her) 760 787 0545: Core Skill AreasDocument6 pagesMychaela Falconia (She/her) 760 787 0545: Core Skill AreasKritika ShuklaPas encore d'évaluation
- OpenVMS State of Port 20171006Document39 pagesOpenVMS State of Port 20171006KiranPas encore d'évaluation
- Hands On Codes!: Luca Baiotti Osaka UniversityDocument7 pagesHands On Codes!: Luca Baiotti Osaka Universityapi-364051818Pas encore d'évaluation
- Ccs V 6 Fundamentals Ms P 430Document66 pagesCcs V 6 Fundamentals Ms P 430tilak k cPas encore d'évaluation
- Linux Kernel and Driver Development Training Lab Book: Free ElectronsDocument39 pagesLinux Kernel and Driver Development Training Lab Book: Free ElectronsSoni BhattaPas encore d'évaluation
- U-Boot Porting Guide: (MPC5200B)Document10 pagesU-Boot Porting Guide: (MPC5200B)lndyaBhaiPas encore d'évaluation
- 01 Beagle BoneDocument16 pages01 Beagle BoneSamraj ECEPas encore d'évaluation
- Programming Embedded Systems with MSP430 and CDocument29 pagesProgramming Embedded Systems with MSP430 and CMinh ThuanPas encore d'évaluation
- AC6 System Workbench - 0Document29 pagesAC6 System Workbench - 0Mayam AyoPas encore d'évaluation
- Lab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusDocument23 pagesLab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusNguyễn Trường Giang100% (1)
- Getting Started With Nuvoton NUC140 32-Bit ARM Cortex-M0 Microcontroller PDFDocument7 pagesGetting Started With Nuvoton NUC140 32-Bit ARM Cortex-M0 Microcontroller PDFoktaPas encore d'évaluation
- Introduction to routing and packet forwardingDocument95 pagesIntroduction to routing and packet forwardingPollyne Shee MuigaiPas encore d'évaluation
- Boot Time Labs PDFDocument28 pagesBoot Time Labs PDFVaibhav DhinganiPas encore d'évaluation
- SOC EncounterDocument69 pagesSOC Encountermaxxtorr723Pas encore d'évaluation
- Yocto Stm32 LabsDocument24 pagesYocto Stm32 LabsMasterson ByornPas encore d'évaluation
- Introduction To Programming Massively Parallel Graphics ProcessorsDocument84 pagesIntroduction To Programming Massively Parallel Graphics ProcessorsdjrivePas encore d'évaluation
- 02 Creating HW LabDocument5 pages02 Creating HW LabgpuonlinePas encore d'évaluation
- Lab 3: A First Look at Petalinux: AcknowledgementsDocument4 pagesLab 3: A First Look at Petalinux: Acknowledgements0106062007Pas encore d'évaluation
- Introduction To ARM Systems-11!17!2012Document203 pagesIntroduction To ARM Systems-11!17!2012imoptra143Pas encore d'évaluation
- Bootloader NotesDocument22 pagesBootloader NotesvibhorkrnitrklPas encore d'évaluation
- Gilas PC MaintenanceDocument97 pagesGilas PC MaintenanceEmmanuel Jimenez-Bacud, CSE-Professional,BA-MA Pol SciPas encore d'évaluation
- Problem Statement: Aim Theory:: Assignment No-1Document33 pagesProblem Statement: Aim Theory:: Assignment No-1shubham shindePas encore d'évaluation
- Programming Your Nucleo Board: Updated:Wednesday, March 14, 2018Document46 pagesProgramming Your Nucleo Board: Updated:Wednesday, March 14, 2018LittleantPas encore d'évaluation
- Xilinx CORE GeneratorDocument39 pagesXilinx CORE GeneratorSuhas ShirolPas encore d'évaluation
- Xilinx System Gen DSP (Programming Hardware in Loop)Document9 pagesXilinx System Gen DSP (Programming Hardware in Loop)Pandu MahiPas encore d'évaluation
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.D'EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Pas encore d'évaluation
- PlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6D'EverandPlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6Pas encore d'évaluation
- M Tech Brochure 201729 MarchDocument41 pagesM Tech Brochure 201729 MarchtuzarahulPas encore d'évaluation
- DsPIC Programmers Reference 70157CDocument364 pagesDsPIC Programmers Reference 70157CEce Ozarici100% (1)
- PIC24H Family DatasheetDocument290 pagesPIC24H Family DatasheettuzarahulPas encore d'évaluation
- Rectifier Diode DatasheetDocument4 pagesRectifier Diode DatasheettuzarahulPas encore d'évaluation
- Lpc236x DsDocument47 pagesLpc236x DstuzarahulPas encore d'évaluation
- Profibus Technical DescriptionDocument36 pagesProfibus Technical Descriptiontuzarahul100% (1)
- Uc 80C32E DatasheetDocument20 pagesUc 80C32E DatasheettuzarahulPas encore d'évaluation
- HF Cearmic Balun DatasheetDocument2 pagesHF Cearmic Balun DatasheettuzarahulPas encore d'évaluation
- White LED DatasheetDocument22 pagesWhite LED DatasheettuzarahulPas encore d'évaluation
- Current Sensors DatasheetDocument1 pageCurrent Sensors DatasheettuzarahulPas encore d'évaluation
- High-Speed Switching Diodes GuideDocument2 pagesHigh-Speed Switching Diodes GuidetuzarahulPas encore d'évaluation
- Rectifier Diode DatasheetDocument4 pagesRectifier Diode DatasheettuzarahulPas encore d'évaluation
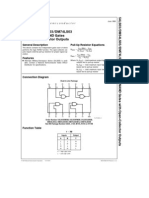
- 74LS27Document6 pages74LS27akulPas encore d'évaluation
- 74LS21Document6 pages74LS21akulPas encore d'évaluation
- 74LS22Document7 pages74LS22tuzarahulPas encore d'évaluation
- IC TTL 74LS00 4x Two Input NANDDocument6 pagesIC TTL 74LS00 4x Two Input NANDZimmyAndikaPutraPas encore d'évaluation
- 74LS20Document6 pages74LS20akulPas encore d'évaluation
- 74LS28Document6 pages74LS28tuzarahulPas encore d'évaluation
- 74LS02Document6 pages74LS02akulPas encore d'évaluation
- 74LS26Document5 pages74LS26tuzarahulPas encore d'évaluation
- DCS Series Data Sheet 0110002-03Document8 pagesDCS Series Data Sheet 0110002-03tuzarahulPas encore d'évaluation
- 74LS30Document6 pages74LS30akulPas encore d'évaluation
- 74LS05Document4 pages74LS05tuzarahulPas encore d'évaluation
- 74LS01Document6 pages74LS01Adam FordPas encore d'évaluation
- 74LS04Document10 pages74LS04tuzarahulPas encore d'évaluation
- 89s52 DatasheetDocument30 pages89s52 DatasheetAnkit TaklePas encore d'évaluation
- 74LS03Document6 pages74LS03tuzarahulPas encore d'évaluation
- Khalil Gibran - The ProphetDocument58 pagesKhalil Gibran - The Prophetshanky4u17Pas encore d'évaluation
- Lpc23xx UmDocument706 pagesLpc23xx Umv1swaroopPas encore d'évaluation
- EU Declaration of Conformity: XFP Analogue Addressable Fire PanelsDocument1 pageEU Declaration of Conformity: XFP Analogue Addressable Fire PanelsAdrian SudituPas encore d'évaluation
- SEO-Optimized Title for Document of Book ListDocument22 pagesSEO-Optimized Title for Document of Book ListfilosPas encore d'évaluation
- ® Low-Loss Foam-Dielectric Coaxial Cable: 1/2" CellflexDocument2 pages® Low-Loss Foam-Dielectric Coaxial Cable: 1/2" CellflexMateus Lucas de Campos e SilvaPas encore d'évaluation
- Tutorial 520Document7 pagesTutorial 520George UrdeaPas encore d'évaluation
- ISF2 Catalog PDFDocument8 pagesISF2 Catalog PDFbdikicPas encore d'évaluation
- Redundant SOVDocument8 pagesRedundant SOVDidik PrasetyaPas encore d'évaluation
- Gemstone WarriorDocument14 pagesGemstone Warriorremow67% (3)
- What Is Ec/Io (And Eb/No) ?: Statistics CategoriesDocument11 pagesWhat Is Ec/Io (And Eb/No) ?: Statistics CategoriesSARVESHPas encore d'évaluation
- Manual 3RP25 Time Relay en-US PDFDocument90 pagesManual 3RP25 Time Relay en-US PDFZulfiqar ZaidiPas encore d'évaluation
- Maestro XS PDFDocument134 pagesMaestro XS PDFRenato García Espinosa100% (1)
- A630 A640 Advanced - Manual.enDocument147 pagesA630 A640 Advanced - Manual.enRogue AndreeaPas encore d'évaluation
- Quectel GSM EVB User Guide V3.4Document35 pagesQuectel GSM EVB User Guide V3.4smhzzPas encore d'évaluation
- tcp54vt25 PDFDocument144 pagestcp54vt25 PDFJay HunterPas encore d'évaluation
- WDS Specification SheetDocument2 pagesWDS Specification SheetWattsPas encore d'évaluation
- Impinj MultiReader 6 6 13 Release NotesDocument3 pagesImpinj MultiReader 6 6 13 Release Notesscribd3962Pas encore d'évaluation
- Profibus: Actuator ControlDocument8 pagesProfibus: Actuator ControlMrSarvan100% (1)
- Advanced Digital Electronics Training SetDocument2 pagesAdvanced Digital Electronics Training SetosamaPas encore d'évaluation
- U-Series Air Circuit Breakers Technical GuideDocument126 pagesU-Series Air Circuit Breakers Technical GuideNguyễn Mạnh TuấnPas encore d'évaluation
- Signal and System Lecture 6Document19 pagesSignal and System Lecture 6ali_rehman87Pas encore d'évaluation
- CH 6 - Voltage Regulator PDFDocument46 pagesCH 6 - Voltage Regulator PDFsureshy-ee213Pas encore d'évaluation
- Power Electronics Project Title PDFDocument4 pagesPower Electronics Project Title PDFpowerPas encore d'évaluation
- Memoria 27PC210 PLCC44Document15 pagesMemoria 27PC210 PLCC44fedePas encore d'évaluation
- POLARIUM Modbus Interface - DescriptionDocument2 pagesPOLARIUM Modbus Interface - DescriptionRaed Al-HajPas encore d'évaluation
- Basic Electrnic ComponenetsDocument73 pagesBasic Electrnic ComponenetsПавел ДимитровPas encore d'évaluation
- Modified Sine-Wave Inverter Enhanced With New WaveformDocument3 pagesModified Sine-Wave Inverter Enhanced With New WaveformJoão Pedro AlmeidaPas encore d'évaluation
- Final Model Foe Grade 12 2011 May (Recovered) PDFDocument18 pagesFinal Model Foe Grade 12 2011 May (Recovered) PDFwondimu0% (1)
- Dr. Nalini G Sundaram Materials Science DivisionDocument63 pagesDr. Nalini G Sundaram Materials Science Divisionlinni123Pas encore d'évaluation
- E Time Relays SHCETDocument27 pagesE Time Relays SHCEThanyalramady0% (1)
- Faraday's Law of Electromagnetic Induction ProjectDocument20 pagesFaraday's Law of Electromagnetic Induction ProjectUsha Pachu38% (8)
- Fisher Man Rescue SystemDocument16 pagesFisher Man Rescue SystemHelloprojectPas encore d'évaluation