Vous aimerez peut-être aussi
- System Development Life CycleDocument22 pagesSystem Development Life CycleakashniranjanePas encore d'évaluation
- Operating SystemDocument35 pagesOperating SystemVasudevPas encore d'évaluation
- ARC132 U Toronto SyllabusDocument6 pagesARC132 U Toronto SyllabusEcon StudentPas encore d'évaluation
- System Development Life Cycle AssignmentDocument5 pagesSystem Development Life Cycle AssignmentAugustine Barlow67% (3)
- Operating System NotesDocument168 pagesOperating System Notesishahma100% (1)
- Writing ProposalDocument18 pagesWriting Proposalchippychip100% (1)
- Networking Fundamentals AssignDocument8 pagesNetworking Fundamentals AssignNadia BakerPas encore d'évaluation
- History of Operating System:: AssignmentDocument3 pagesHistory of Operating System:: AssignmentTaimoorPas encore d'évaluation
- System Development Life CycleDocument3 pagesSystem Development Life CycleGaurav100% (1)
- QuestionnaireDocument5 pagesQuestionnaireAminaHodžićPas encore d'évaluation
- InterruptsDocument10 pagesInterruptsVijay PandeyPas encore d'évaluation
- IT1205 Computer Systems 1Document10 pagesIT1205 Computer Systems 1vishwajePas encore d'évaluation
- Lecture12 - Vertical Fragmentation - IIDocument15 pagesLecture12 - Vertical Fragmentation - IIButtPas encore d'évaluation
- Theory of Computation Question BankDocument17 pagesTheory of Computation Question BankAnand SharmaPas encore d'évaluation
- Operating Systems Assignment 1Document2 pagesOperating Systems Assignment 1rajeevvanchaPas encore d'évaluation
- Hciu AssignmentDocument74 pagesHciu AssignmentAakash Bathla50% (2)
- CH 05 - OS8eDocument91 pagesCH 05 - OS8eAnonymous dDhOhsJPas encore d'évaluation
- Digital Notes Operating Systems (R20a0504)Document161 pagesDigital Notes Operating Systems (R20a0504)Kalpana MrcetPas encore d'évaluation
- 5 SDLC Systems Development Life CycleDocument105 pages5 SDLC Systems Development Life CycleCarlyn Joy Paculba100% (1)
- Computer System ArchitectureDocument22 pagesComputer System ArchitectureParth ViraniPas encore d'évaluation
- Level 4 Diploma in Computing: Computer Network Cupcake Cyber CaféDocument21 pagesLevel 4 Diploma in Computing: Computer Network Cupcake Cyber CaféAngel AdoptantePas encore d'évaluation
- COMP 3511 - Operating SystemDocument38 pagesCOMP 3511 - Operating SystemLinh TaPas encore d'évaluation
- Operating Systems: Faqs: Questions in This LectureDocument19 pagesOperating Systems: Faqs: Questions in This LectureAdvRocksPas encore d'évaluation
- Operating SystemDocument103 pagesOperating SystemYUVRAJ WAGH100% (1)
- Operating Systems Notes (MSC IT)Document203 pagesOperating Systems Notes (MSC IT)Ram Kumar100% (1)
- 02 - FootPrintingDocument91 pages02 - FootPrintingThiện Châu Ngọc BảoPas encore d'évaluation
- Operating SystemDocument66 pagesOperating SystemDr. Hitesh MohapatraPas encore d'évaluation
- Computer Architecture Quick NotesDocument2 pagesComputer Architecture Quick NotesAgrippa MungaziPas encore d'évaluation
- 17 Concurrency IDocument69 pages17 Concurrency IKiev DemidovichPas encore d'évaluation
- Notes On Operating SystemsDocument256 pagesNotes On Operating SystemsKroff DemedPas encore d'évaluation
- UNIT I Notes PDFDocument27 pagesUNIT I Notes PDFAjith MadhanPas encore d'évaluation
- Concurrency: Mutual Exclusion and Synchronization: Operating Systems: Internals and Design PrinciplesDocument69 pagesConcurrency: Mutual Exclusion and Synchronization: Operating Systems: Internals and Design PrinciplesAmnaPas encore d'évaluation
- Risk Management (CSM - 735) Final ReportDocument13 pagesRisk Management (CSM - 735) Final ReportrahulPas encore d'évaluation
- Data Access ProgrammingDocument7 pagesData Access ProgrammingMaica Albert BallanganPas encore d'évaluation
- Notes Xii Dec 2020Document82 pagesNotes Xii Dec 2020Liza MalikPas encore d'évaluation
- Computer NetworkingDocument26 pagesComputer Networkingprashanth100% (2)
- Predicate Logic 1Document24 pagesPredicate Logic 1miriyala nagendraPas encore d'évaluation
- Time ComplexityDocument3 pagesTime ComplexityFahad KhanPas encore d'évaluation
- Stqa Unit 3 NotesDocument22 pagesStqa Unit 3 Noteschandan kumar giriPas encore d'évaluation
- Computer Networks NetworkingDocument7 pagesComputer Networks Networkingzohebdhuka_libraPas encore d'évaluation
- Parallel Processing Assignment 1Document14 pagesParallel Processing Assignment 1RobelPas encore d'évaluation
- Research in Computer ScienceDocument41 pagesResearch in Computer ScienceIrika100% (1)
- 2mark and 16 OperatingSystemsDocument24 pages2mark and 16 OperatingSystemsDhanusha Chandrasegar SabarinathPas encore d'évaluation
- Embedded System: Real-Time Operating SystemsDocument44 pagesEmbedded System: Real-Time Operating SystemsSamuel Adamu100% (1)
- Operating System Assignment For SYBCA: The Following Assignment Have To Be Submitted On 23 Jan 2012. OS QuestionsDocument3 pagesOperating System Assignment For SYBCA: The Following Assignment Have To Be Submitted On 23 Jan 2012. OS QuestionsPriti Khemani TalrejaPas encore d'évaluation
- 9.2 Desirable Features of Good Distributed File SystemDocument20 pages9.2 Desirable Features of Good Distributed File SystemAbitha DPas encore d'évaluation
- Unix OsDocument23 pagesUnix OsParvathi Goud100% (1)
- UML NoteDocument7 pagesUML NoteRajashreeRajPas encore d'évaluation
- DS Answer PDFDocument79 pagesDS Answer PDFBirat KarkiPas encore d'évaluation
- 1 Introduction Module 1Document64 pages1 Introduction Module 1Ranjitha JayaramaiahPas encore d'évaluation
- Concurrency: Mutual Exclusion and Synchronization: Operating Systems: Internals and Design PrinciplesDocument61 pagesConcurrency: Mutual Exclusion and Synchronization: Operating Systems: Internals and Design PrinciplesRamadan ElhendawyPas encore d'évaluation
- Aikman Series Multiple Choice Questions CH# 1Document9 pagesAikman Series Multiple Choice Questions CH# 1AdnanPas encore d'évaluation
- Pert and CPMDocument7 pagesPert and CPMRanveer RanaPas encore d'évaluation
- A To Z PPT NotesDocument62 pagesA To Z PPT NotesKarthikeyan RamajayamPas encore d'évaluation
- Chap 4Document15 pagesChap 4Tú B Mai100% (1)
- 2.operating System 2.introduction To LinuxDocument23 pages2.operating System 2.introduction To LinuxSri VardhanPas encore d'évaluation
- Systems Development Life Cycle - SDLCDocument12 pagesSystems Development Life Cycle - SDLCkangsirodjPas encore d'évaluation
- Understanding Operating Systems Sixth EditionDocument46 pagesUnderstanding Operating Systems Sixth EditionBSIT3_IT116100% (3)
- Operating Systems Assignment PDFDocument8 pagesOperating Systems Assignment PDFfaisal saghirPas encore d'évaluation
- Question: Explain Context SwitchingDocument10 pagesQuestion: Explain Context SwitchingpathakpranavPas encore d'évaluation
- If If: CF I3'Rpf Ij1R11I 31fli, CF Ij1Rf1IDocument34 pagesIf If: CF I3'Rpf Ij1R11I 31fli, CF Ij1Rf1IashivaramakrishnaPas encore d'évaluation
- Manu Dharma PDFDocument232 pagesManu Dharma PDFashivaramakrishna100% (1)
- Name: Swati Acharya Emp ID: 49447 - FS Grade: C1 Designation: Senior ConsultantDocument16 pagesName: Swati Acharya Emp ID: 49447 - FS Grade: C1 Designation: Senior ConsultantashivaramakrishnaPas encore d'évaluation
- Vdocuments - in Sri Rudram SanskritDocument7 pagesVdocuments - in Sri Rudram Sanskritashivaramakrishna0% (1)
- Hpayta: 4afa, Ta, Aafa, YtafaDocument4 pagesHpayta: 4afa, Ta, Aafa, YtafaashivaramakrishnaPas encore d'évaluation
- List of Tally Shortcuts: Navigation KeyDocument1 pageList of Tally Shortcuts: Navigation KeyashivaramakrishnaPas encore d'évaluation
- Sandhyavandana Bhashyam Telugu PDFDocument139 pagesSandhyavandana Bhashyam Telugu PDFashivaramakrishnaPas encore d'évaluation
- Payment Summary: Payment Details General Transaction DetailsDocument1 pagePayment Summary: Payment Details General Transaction DetailsashivaramakrishnaPas encore d'évaluation
- Krishna Yajurveda Taitiriya Samhita PDFDocument478 pagesKrishna Yajurveda Taitiriya Samhita PDFashivaramakrishna100% (1)
- Operating Systems AssignmentDocument11 pagesOperating Systems AssignmentashivaramakrishnaPas encore d'évaluation
- Dept. of Information Technology Vasavi College of Engineering IV Yr. IT-Information SecurityDocument3 pagesDept. of Information Technology Vasavi College of Engineering IV Yr. IT-Information SecurityashivaramakrishnaPas encore d'évaluation
- VLSI Design Outcomes Mapping 2014-15Document3 pagesVLSI Design Outcomes Mapping 2014-15ashivaramakrishnaPas encore d'évaluation
- Department of Information Technology Vasavi College of EngineeringDocument8 pagesDepartment of Information Technology Vasavi College of EngineeringashivaramakrishnaPas encore d'évaluation
- Based On Students Who Are Above Minimum LevelDocument3 pagesBased On Students Who Are Above Minimum LevelashivaramakrishnaPas encore d'évaluation
- Schedule For November 2014: Setting The Table Servers CleanupDocument2 pagesSchedule For November 2014: Setting The Table Servers CleanupashivaramakrishnaPas encore d'évaluation
- Alumni MeetDocument2 pagesAlumni MeetashivaramakrishnaPas encore d'évaluation
- Prayer - Bro. Reuben - Bro. Reuben: Prayer & Singing Prayer & Singing Prayer & SingingDocument1 pagePrayer - Bro. Reuben - Bro. Reuben: Prayer & Singing Prayer & Singing Prayer & SingingashivaramakrishnaPas encore d'évaluation
- Calvary Point December 2014 TemplateDocument1 pageCalvary Point December 2014 TemplateashivaramakrishnaPas encore d'évaluation
- VLSI Design Outcomes Mapping 2014-15Document3 pagesVLSI Design Outcomes Mapping 2014-15ashivaramakrishnaPas encore d'évaluation
- Dept. of Information Technology Vasavi College of Engineering III Yr. IT-Operating SystemsDocument4 pagesDept. of Information Technology Vasavi College of Engineering III Yr. IT-Operating SystemsashivaramakrishnaPas encore d'évaluation
- TOA - Assignment Rubrics For EvaluationDocument2 pagesTOA - Assignment Rubrics For EvaluationashivaramakrishnaPas encore d'évaluation
- Calvary Point NOVEMBER 2014Document2 pagesCalvary Point NOVEMBER 2014ashivaramakrishnaPas encore d'évaluation
- Rahul Kishore Singh, (2010 Passed Out) : Co-Founder & Director, PlaceteamDocument1 pageRahul Kishore Singh, (2010 Passed Out) : Co-Founder & Director, PlaceteamashivaramakrishnaPas encore d'évaluation
- S.no Questions Roll Nos: N.davidraju@staff - Vce.ac - inDocument1 pageS.no Questions Roll Nos: N.davidraju@staff - Vce.ac - inashivaramakrishnaPas encore d'évaluation
- DW Architecture & Best PracticesDocument67 pagesDW Architecture & Best Practicesapi-19730613Pas encore d'évaluation
- CA AutoSys WA-CAAutoSys WCC Workload Automation r11 TroubleshootingDocument33 pagesCA AutoSys WA-CAAutoSys WCC Workload Automation r11 Troubleshootingsimondclinch100% (1)
- Sage Accpac LanPak Installation GuideDocument19 pagesSage Accpac LanPak Installation GuideKeith Chia WeijinPas encore d'évaluation
- Data From WOA13 1.00deg 1955-2012 AprilDocument405 pagesData From WOA13 1.00deg 1955-2012 AprilHariantoPas encore d'évaluation
- Netezza Stored Procedures GuideDocument88 pagesNetezza Stored Procedures Guidenek555Pas encore d'évaluation
- 17 Case Study Risk Repsonse Planning PDFDocument22 pages17 Case Study Risk Repsonse Planning PDFmoPas encore d'évaluation
- UMTS OverviewDocument9 pagesUMTS OverviewaksasinghPas encore d'évaluation
- Birla Institute of Technology and Science, Pilani KK Birla - Goa CampusDocument2 pagesBirla Institute of Technology and Science, Pilani KK Birla - Goa CampusShubham PandiaPas encore d'évaluation
- 2.software and Hardware Requirement SpecificationDocument3 pages2.software and Hardware Requirement Specificationnaba221085Pas encore d'évaluation
- Gadget Comparison - Mi 1c - 02 - Ahmad Ridlo Suhardi#14 - Gita Kartika Pariwara#21 - Putri Dian IstianaDocument8 pagesGadget Comparison - Mi 1c - 02 - Ahmad Ridlo Suhardi#14 - Gita Kartika Pariwara#21 - Putri Dian IstianaGita Kartika PariwaraPas encore d'évaluation
- Shreyon ResumeDocument1 pageShreyon ResumeShameek BarmanPas encore d'évaluation
- Attributed Profitability Segments in Copa For SfinDocument9 pagesAttributed Profitability Segments in Copa For SfinMOORTHYPas encore d'évaluation
- HSSLiVE XII Practical Exam Commerce Comp Accountancy Scheme Model QuestionsDocument18 pagesHSSLiVE XII Practical Exam Commerce Comp Accountancy Scheme Model QuestionsDrAshish VashisthaPas encore d'évaluation
- Management Information Systems: Managing The Digital Firm: Fifteenth EditionDocument19 pagesManagement Information Systems: Managing The Digital Firm: Fifteenth EditionShaunak RawkePas encore d'évaluation
- Chap 3: General OOP Concepts: Computer ScienceDocument3 pagesChap 3: General OOP Concepts: Computer ScienceSurya SinghaPas encore d'évaluation
- 2-Vlsicad-Compbool PDFDocument63 pages2-Vlsicad-Compbool PDFVishnu KSPas encore d'évaluation
- (IJCST-V5I6P21) :babasaheb .S. Satpute, Dr. Raghav YadavDocument4 pages(IJCST-V5I6P21) :babasaheb .S. Satpute, Dr. Raghav YadavEighthSenseGroupPas encore d'évaluation
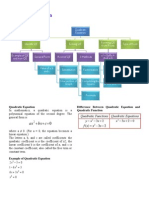
- Quadratic Equation: Ax BXCDocument9 pagesQuadratic Equation: Ax BXCMalaysiaBoleh98% (56)
- Dimensional Tolerance TutorialDocument9 pagesDimensional Tolerance TutorialstansilawPas encore d'évaluation
- Cs 111Document5 pagesCs 111nnoopPas encore d'évaluation
- W To Remove Palevo From Your ComputerDocument11 pagesW To Remove Palevo From Your ComputerMartaSekulicPas encore d'évaluation
- Qtiplot Manual enDocument390 pagesQtiplot Manual enjovita georgePas encore d'évaluation
- AIA CPC XML Documentation PDFDocument38 pagesAIA CPC XML Documentation PDFAnonymous 9I5YIasIpPas encore d'évaluation
- Example - Software Architecture DocumentDocument13 pagesExample - Software Architecture DocumentSubbu6502Pas encore d'évaluation
- Leica Geo Office Datasheet enDocument2 pagesLeica Geo Office Datasheet enPavlos IordanidisPas encore d'évaluation
- Websams Training Staff 2014Document68 pagesWebsams Training Staff 2014api-230427224Pas encore d'évaluation
- Quiz # 3 Answers and Solution: Outputs (In Units) Fixed Cost Variable Cost Total Cost Total Revenue ProfitDocument2 pagesQuiz # 3 Answers and Solution: Outputs (In Units) Fixed Cost Variable Cost Total Cost Total Revenue ProfitJolina AynganPas encore d'évaluation
- Avaya IP Telephony Implementation GuideDocument71 pagesAvaya IP Telephony Implementation GuideJuni78089100% (2)
- McGhee Productivity Solutions To Host "Take Back Your Life!" Program On Personal Productivity in Orange County, CADocument2 pagesMcGhee Productivity Solutions To Host "Take Back Your Life!" Program On Personal Productivity in Orange County, CAPR.comPas encore d'évaluation
- Silabus SAP Dasar Sistem Dan Kendali Cerdas v2Document2 pagesSilabus SAP Dasar Sistem Dan Kendali Cerdas v2Rahmat MuttaqinPas encore d'évaluation