Vous aimerez peut-être aussi
- Principles and Characteristics of Distance ProtectionDocument5 pagesPrinciples and Characteristics of Distance ProtectionFrancisco MartinezPas encore d'évaluation
- Frequency RelayDocument9 pagesFrequency RelayLanya AramPas encore d'évaluation
- Conclusions and Scope For Future WorkDocument5 pagesConclusions and Scope For Future WorkPreet ChahalPas encore d'évaluation
- EMPT Modeling Spring08Document6 pagesEMPT Modeling Spring08Long LeoPas encore d'évaluation
- Overcurrent Relay Advances for Modern Electricity NetworksD'EverandOvercurrent Relay Advances for Modern Electricity NetworksPas encore d'évaluation
- Power System Protection Studies and Relay CoordinationDocument9 pagesPower System Protection Studies and Relay CoordinationJeya Kannan100% (1)
- Voltage sag studies in industrial plantsDocument6 pagesVoltage sag studies in industrial plantscaetanoPas encore d'évaluation
- Current Differential Line Protection Setting ConsiderationsDocument28 pagesCurrent Differential Line Protection Setting ConsiderationskankokwahPas encore d'évaluation
- Chapter One: Introduction 1.1 Background of The StudyDocument30 pagesChapter One: Introduction 1.1 Background of The StudyUzoma FrancisPas encore d'évaluation
- Protection Relay SettingsDocument3 pagesProtection Relay SettingssmsbondPas encore d'évaluation
- Design HDocument7 pagesDesign HJohn Mark DalidaPas encore d'évaluation
- Improved Power Transformer Protection Using Numerical RelaysDocument17 pagesImproved Power Transformer Protection Using Numerical RelayssegamegaPas encore d'évaluation
- Protection Principles and ComponentsDocument10 pagesProtection Principles and ComponentsMuhammad TaufikPas encore d'évaluation
- A Report On Fault Analysis of Power Distribution SystemsDocument19 pagesA Report On Fault Analysis of Power Distribution SystemsKalyan Ranjan100% (3)
- Why Primary Injection TestsDocument6 pagesWhy Primary Injection TestsEdward Osore100% (2)
- Robust Non-Communication Line Protection Scheme Using Novel QuantitiesDocument8 pagesRobust Non-Communication Line Protection Scheme Using Novel QuantitiessunitharajababuPas encore d'évaluation
- Relayoperationprinciples 141126065914 Conversion Gate01Document43 pagesRelayoperationprinciples 141126065914 Conversion Gate01kenlavie2Pas encore d'évaluation
- High Speed Numerical Techniques For Transmission Line Protection S D A PickeringDocument4 pagesHigh Speed Numerical Techniques For Transmission Line Protection S D A Pickeringkvasquez1979Pas encore d'évaluation
- Ramu IntroductionDocument5 pagesRamu IntroductionRamuPas encore d'évaluation
- Numerical RelaysDocument38 pagesNumerical Relaysashutosh2009Pas encore d'évaluation
- 01397508Document6 pages01397508Rafi MuhammedPas encore d'évaluation
- Estimating Voltage Sag Using PSCAD SimulationDocument5 pagesEstimating Voltage Sag Using PSCAD Simulationpramod_bhatt192991Pas encore d'évaluation
- Microprocessor Based RelayDocument3 pagesMicroprocessor Based RelayHaseeb AhmedPas encore d'évaluation
- Transmission Line Fault Detection and Classification: Abstract-Transmission Line Protection Is An Important Issue inDocument8 pagesTransmission Line Fault Detection and Classification: Abstract-Transmission Line Protection Is An Important Issue innidhichauhan0288Pas encore d'évaluation
- Power System RelayingDocument22 pagesPower System RelayingKhairul AshrafPas encore d'évaluation
- The Fundamentals of Protection Relay Co-Ordination and Timecurrent Grading PrinciplesDocument9 pagesThe Fundamentals of Protection Relay Co-Ordination and Timecurrent Grading Principlesfredhalder99Pas encore d'évaluation
- Literature Review On Relay Coordination Using Software TechniquesDocument4 pagesLiterature Review On Relay Coordination Using Software TechniquesMohitPas encore d'évaluation
- Switchgear Application Issues For Mission Critical Power Systems, Part OneDocument12 pagesSwitchgear Application Issues For Mission Critical Power Systems, Part OneMithra Sathish KumarPas encore d'évaluation
- Synchro Measurement Based Intelligent Fault Identification and Location of Parallel Transmission LineDocument6 pagesSynchro Measurement Based Intelligent Fault Identification and Location of Parallel Transmission LineSundaraPandiyanPas encore d'évaluation
- IJRET Power Grid Synchronization Failure Detection and RecoveryDocument3 pagesIJRET Power Grid Synchronization Failure Detection and RecoveryAasif Mushtaq BhatPas encore d'évaluation
- Co-Ordination of Overcurrent Relay For Chemical Industrial Plant Using ETAPDocument5 pagesCo-Ordination of Overcurrent Relay For Chemical Industrial Plant Using ETAPHimdad Tahir0% (1)
- Eng-Function Based Optimized-Mohamed AfifiDocument14 pagesEng-Function Based Optimized-Mohamed AfifiImpact JournalsPas encore d'évaluation
- Power Management in Sensor Networks: Vijay Bhuse CS, WmuDocument31 pagesPower Management in Sensor Networks: Vijay Bhuse CS, WmuchryPas encore d'évaluation
- Protecting Transmission Line With Series Capacitor, A New Innovative MethodDocument14 pagesProtecting Transmission Line With Series Capacitor, A New Innovative MethodShree VEDA Gate CoachingPas encore d'évaluation
- Distance Relay ModellingDocument10 pagesDistance Relay ModellingpavanrajhrPas encore d'évaluation
- Thesis On Power System PDFDocument6 pagesThesis On Power System PDFvxjtklxff100% (2)
- Wide Area Monitoring Systems (WAMS) - Power System Operation and ProtectionDocument11 pagesWide Area Monitoring Systems (WAMS) - Power System Operation and ProtectionChristopher EarnshawPas encore d'évaluation
- Power System Contingency AnalysisDocument9 pagesPower System Contingency AnalysisAdedokun AbayomiPas encore d'évaluation
- Control and Protection of Hydro Electric Power PlantDocument181 pagesControl and Protection of Hydro Electric Power PlantMd Abdul Raheman33% (3)
- EE 466 Power System Protection: University of HailDocument22 pagesEE 466 Power System Protection: University of Hailselvithimmarajan@gmail.comPas encore d'évaluation
- ZERO CrossingDocument6 pagesZERO CrossingjosePas encore d'évaluation
- Effect of Power Swing on Distance ProtectionDocument10 pagesEffect of Power Swing on Distance Protectionसौरभ जांगड़ाPas encore d'évaluation
- A New Method For Detection of Faults During Power Swing Using Two-End MeasurementsDocument4 pagesA New Method For Detection of Faults During Power Swing Using Two-End MeasurementsFelix GamarraPas encore d'évaluation
- Itees Feb 2021 JPDocument18 pagesItees Feb 2021 JPDr O H GuptaPas encore d'évaluation
- Relay Coordination 1 PDFDocument5 pagesRelay Coordination 1 PDFNikhil SainiPas encore d'évaluation
- Transmission Line Fault Detection Methods AnalysisDocument28 pagesTransmission Line Fault Detection Methods AnalysisAvinash ChimkarPas encore d'évaluation
- Bluetooth Fault Detection for Transmission LinesDocument10 pagesBluetooth Fault Detection for Transmission LinesKusha SatapathyPas encore d'évaluation
- Basic Power Protection Relaying Manual PDFDocument407 pagesBasic Power Protection Relaying Manual PDFmuaz_aminu1422Pas encore d'évaluation
- Distribution System DesignDocument14 pagesDistribution System DesignAhmed0% (1)
- WindowDocument4 pagesWindowsirisiri100Pas encore d'évaluation
- Modelling and Simulation of Reverse Power Relay For Loss of Mains Protection of Distributed Generation in MicrogridsDocument5 pagesModelling and Simulation of Reverse Power Relay For Loss of Mains Protection of Distributed Generation in MicrogridsthavaselvanPas encore d'évaluation
- Optimal Over Current Relay Coordination Using Genetic AlgorithmsDocument4 pagesOptimal Over Current Relay Coordination Using Genetic AlgorithmsDrManohar SinghPas encore d'évaluation
- Sotl 2Document7 pagesSotl 2Syarifah AdrianaPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageD'EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StoragePas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsD'EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsD'EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsPas encore d'évaluation
- 7XG22 2RMLG Catalogue SheetDocument16 pages7XG22 2RMLG Catalogue SheetHtun SoePas encore d'évaluation
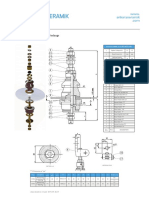
- 36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Document1 page36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Yigit SarıkayaPas encore d'évaluation
- 7SR10 Argus FlyerDocument2 pages7SR10 Argus FlyerHoang EpuPas encore d'évaluation
- 36 KV 630 Din 42532 89 2606285Document1 page36 KV 630 Din 42532 89 2606285Yigit SarıkayaPas encore d'évaluation
- SEPAM ProtectionDocument14 pagesSEPAM ProtectionYigit SarıkayaPas encore d'évaluation
- F0126405 PB OLTCsDocument24 pagesF0126405 PB OLTCsDEADMANPas encore d'évaluation
- MiCOM IDMT Curves CalculatorDocument2 pagesMiCOM IDMT Curves CalculatorYigit SarıkayaPas encore d'évaluation
- MiCOM IDMT Curves CalculatorDocument2 pagesMiCOM IDMT Curves CalculatorYigit SarıkayaPas encore d'évaluation
- Bushing PDFDocument92 pagesBushing PDFYigit SarıkayaPas encore d'évaluation
- 1 KV 250 A 3150 Din 42530 67 3370221Document2 pages1 KV 250 A 3150 Din 42530 67 3370221Yigit SarıkayaPas encore d'évaluation
- Pac E100 Ayar KilavuzuDocument15 pagesPac E100 Ayar KilavuzuYigit Sarıkaya0% (1)
- SL Ref542plus (En) A 1vcp000060Document63 pagesSL Ref542plus (En) A 1vcp000060Yigit SarıkayaPas encore d'évaluation
- Page 10 117: Bas耂c HTML Vers耂onDocument2 pagesPage 10 117: Bas耂c HTML Vers耂onYigit SarıkayaPas encore d'évaluation
- Hint: User Name and Password Are Case SensitiveDocument1 pageHint: User Name and Password Are Case SensitiveYigit SarıkayaPas encore d'évaluation
- Terminal 01: External GridDocument2 pagesTerminal 01: External GridYigit SarıkayaPas encore d'évaluation
- 36 kV 250A 450 mm Transformer Bushing Insulator Drawings and DocumentsDocument92 pages36 kV 250A 450 mm Transformer Bushing Insulator Drawings and DocumentsYigit SarıkayaPas encore d'évaluation
- ErneuerbareEnergien PROSP enDocument8 pagesErneuerbareEnergien PROSP enYigit SarıkayaPas encore d'évaluation
- DIgSILENT PDFDocument1 pageDIgSILENT PDFYigit SarıkayaPas encore d'évaluation
- High Power SwitchesDocument6 pagesHigh Power SwitchesYigit SarıkayaPas encore d'évaluation
- Brosura PTE-100-C Plus 1Document1 pageBrosura PTE-100-C Plus 1Yigit SarıkayaPas encore d'évaluation
- Sepam Series 40 Protective Relays: User's ManualDocument256 pagesSepam Series 40 Protective Relays: User's ManualccrrzzPas encore d'évaluation
- Digital power plant commander for generating setsDocument2 pagesDigital power plant commander for generating setsYigit SarıkayaPas encore d'évaluation
- Ac/Dc Converter: For The European Linear Particle Accelerator CERN Near GenevaDocument1 pageAc/Dc Converter: For The European Linear Particle Accelerator CERN Near GenevaYigit SarıkayaPas encore d'évaluation
- Promo Mors Smitt enDocument20 pagesPromo Mors Smitt enYigit SarıkayaPas encore d'évaluation
- Products L3 Vac Contactors CPX CLX CBX V1 71016 enDocument2 pagesProducts L3 Vac Contactors CPX CLX CBX V1 71016 enYigit SarıkayaPas encore d'évaluation
- Cat Comp D EngDocument3 pagesCat Comp D EngYigit SarıkayaPas encore d'évaluation
- Friem Industry en 07 2010Document2 pagesFriem Industry en 07 2010Yigit SarıkayaPas encore d'évaluation
- Bomb-280 enDocument2 pagesBomb-280 enYigit SarıkayaPas encore d'évaluation
- MT860 Energy Measurement MeterDocument2 pagesMT860 Energy Measurement MeterGuson KuntartoPas encore d'évaluation
- EW2.2 eDocument6 pagesEW2.2 eYigit SarıkayaPas encore d'évaluation
- BV Rules - TransformersDocument3 pagesBV Rules - TransformersFebilaPas encore d'évaluation
- A User S Guide To Electrical Ppe Based On Nfpa 70 e Ray A. Jones and Jae G. Jones PDFDocument88 pagesA User S Guide To Electrical Ppe Based On Nfpa 70 e Ray A. Jones and Jae G. Jones PDFJairo FlechasPas encore d'évaluation
- Voltage Dip Immunity of Equipment and InstallationsDocument250 pagesVoltage Dip Immunity of Equipment and InstallationsHans De Keulenaer100% (1)
- Chauvin Arnoux Catalogue 2016 PDFDocument244 pagesChauvin Arnoux Catalogue 2016 PDFlilisanica6232Pas encore d'évaluation
- Transistor 2sc5815Document3 pagesTransistor 2sc5815Nachiket KshirsagarPas encore d'évaluation
- mrr1 eDocument18 pagesmrr1 eAyan MajiPas encore d'évaluation
- T1 Datasheet DZ BZX55C-SeriesDocument3 pagesT1 Datasheet DZ BZX55C-SeriesAlex GrigoriePas encore d'évaluation
- Dih 52Document7 pagesDih 52Sourav Kumar GuptaPas encore d'évaluation
- Television and DisplayDocument36 pagesTelevision and DisplayEbenezer HaulePas encore d'évaluation
- BK3120Document86 pagesBK3120Isaí LemusPas encore d'évaluation
- ADXL337Document17 pagesADXL337Anlles ChicaizaPas encore d'évaluation
- Electrical Measuring InstrumentsDocument10 pagesElectrical Measuring InstrumentsKhen RamosPas encore d'évaluation
- Peak Atlas DCA Pro: User GuideDocument49 pagesPeak Atlas DCA Pro: User GuideLaurentEunicePas encore d'évaluation
- Winding Factor - Pitch Factor - Distribution FactorDocument6 pagesWinding Factor - Pitch Factor - Distribution FactorM Kashif JunaidPas encore d'évaluation
- Electromagnetic Field MappingDocument2 pagesElectromagnetic Field MappingLim Hui Wen100% (1)
- 3.expannded Battery Treatment Service Guide - TCS BatteryDocument1 page3.expannded Battery Treatment Service Guide - TCS BatteryHICHAM el HAYAOUIPas encore d'évaluation
- H Series An ManualDocument5 pagesH Series An ManualraduldelPas encore d'évaluation
- EET301 2013 Chapter 4Document61 pagesEET301 2013 Chapter 4Lee Boon HongPas encore d'évaluation
- Blind StickDocument18 pagesBlind StickPratik Rajkumar UbalePas encore d'évaluation
- Progress Report of Minor ProjectDocument32 pagesProgress Report of Minor ProjectVaibhav DahiyaPas encore d'évaluation
- Wi Cswip 3.1 Part 13Document7 pagesWi Cswip 3.1 Part 13Ramakrishnan AmbiSubbiahPas encore d'évaluation
- Beam Penetration Method: PhosphorDocument3 pagesBeam Penetration Method: PhosphorToheebdarePas encore d'évaluation
- User Manual Rish Insu 10Document10 pagesUser Manual Rish Insu 10Manoj TyagiPas encore d'évaluation
- Journal Jpe 18-3 249301697Document8 pagesJournal Jpe 18-3 249301697Carlos DPPas encore d'évaluation
- Automatic Pump ON - OFF Based On FireDocument5 pagesAutomatic Pump ON - OFF Based On Firesmartxdigital marketPas encore d'évaluation
- MA5002VZ SM 130446-1amplificator ManualDocument140 pagesMA5002VZ SM 130446-1amplificator Manualtiganiada100% (1)
- Thermocouple: Seeback EffectDocument8 pagesThermocouple: Seeback EffectMuhammadHadiPas encore d'évaluation
- TIRODA THERMAL DESIGN REPORTDocument38 pagesTIRODA THERMAL DESIGN REPORTmithun46100% (2)
- OETI Carpet Classification enDocument4 pagesOETI Carpet Classification ensabry singerPas encore d'évaluation
- SBP17 Indar GeneratorsDocument20 pagesSBP17 Indar GeneratorsyijnuusPas encore d'évaluation