Vous aimerez peut-être aussi
- Devices and Communication Buses For Devices NetworkDocument211 pagesDevices and Communication Buses For Devices NetworkDhrumeet PatelPas encore d'évaluation
- Communication InterfaceDocument45 pagesCommunication Interfaceprabhabathi devi100% (1)
- RS-485 Tech NoteDocument21 pagesRS-485 Tech NoteAshley Sequeira100% (3)
- Msp430 Adc12Document40 pagesMsp430 Adc12Sunny SharmaPas encore d'évaluation
- Introduction To Spi CommunicationDocument5 pagesIntroduction To Spi Communicationjoyal jose100% (2)
- RS 485Document51 pagesRS 485mgitecetech100% (1)
- Training F4 V1.3 PDFDocument219 pagesTraining F4 V1.3 PDFdie6o_brPas encore d'évaluation
- Architecture of FPGAs and CPLDS: A TutorialDocument41 pagesArchitecture of FPGAs and CPLDS: A Tutorialgongster100% (5)
- Tiva C Series LaunchPadDocument152 pagesTiva C Series LaunchPadhuyvt01Pas encore d'évaluation
- PWMDocument57 pagesPWMAhmed Mortuza Saleque SaikotPas encore d'évaluation
- Arm7 LPC2148 1Document48 pagesArm7 LPC2148 1Roberta Fisher100% (2)
- EmbeddedSystemsAndLabsForARM-V1 2 PDFDocument287 pagesEmbeddedSystemsAndLabsForARM-V1 2 PDFKCB MEPas encore d'évaluation
- FPGA ArchitectureDocument39 pagesFPGA ArchitectureeeshgargPas encore d'évaluation
- USB Protocol Specification: Data Encoding/DecodingDocument12 pagesUSB Protocol Specification: Data Encoding/DecodingUtpal100% (5)
- Modbus ProtocolDocument67 pagesModbus ProtocolVaibhav Tripathi100% (3)
- Pic Based PLCDocument21 pagesPic Based PLCWaqas Maqsud100% (1)
- Haps-54 March2009 ManualDocument74 pagesHaps-54 March2009 Manualjohn92691Pas encore d'évaluation
- Haps 80 BrochureDocument14 pagesHaps 80 BrochurevivekvlsiPas encore d'évaluation
- Week 12 - Control SystemDocument30 pagesWeek 12 - Control SystemAzizan Anuar100% (1)
- An Introduction To JTAG Boundary Scan From Sun MicroelectronicsDocument10 pagesAn Introduction To JTAG Boundary Scan From Sun MicroelectronicsJoemill Veloso FlordelisPas encore d'évaluation
- Convert ASCII Characters To Keyboard Scan CodesDocument3 pagesConvert ASCII Characters To Keyboard Scan Codesejmelchiors100% (1)
- RS 485Document6 pagesRS 485Venkatesh Venkataramani100% (1)
- Introduction To ARM Systems-11!17!2012Document203 pagesIntroduction To ARM Systems-11!17!2012imoptra143Pas encore d'évaluation
- Module 01-MicrocontrollerDocument15 pagesModule 01-MicrocontrollerRejwan TanzinPas encore d'évaluation
- RS-232 and RS-485 Serial InterfacesDocument10 pagesRS-232 and RS-485 Serial InterfacesSPAPUKYAN100% (3)
- Programming On-Chip Flash Memories of 56F80X Devices Using The Jtag/Once InterfaceDocument20 pagesProgramming On-Chip Flash Memories of 56F80X Devices Using The Jtag/Once InterfaceTaiwoPas encore d'évaluation
- ProductSpec Triconex Tricon 4351BDocument36 pagesProductSpec Triconex Tricon 4351BARTURPas encore d'évaluation
- USB: Universal Serial BusDocument38 pagesUSB: Universal Serial Buscma8888100% (3)
- SPI For Multiprocessor CommunicationDocument44 pagesSPI For Multiprocessor CommunicationFaizan Ali HaiderPas encore d'évaluation
- Low Power Uart DeviceDocument19 pagesLow Power Uart DeviceparnabmasterPas encore d'évaluation
- Lal Usb Interface Vlsi 2010Document22 pagesLal Usb Interface Vlsi 2010Ygb RedaPas encore d'évaluation
- All About FPGAsDocument11 pagesAll About FPGAsSujeet SharmaPas encore d'évaluation
- PLC Signal ConditioningDocument8 pagesPLC Signal ConditioningJyotiska DePas encore d'évaluation
- Programming I2C/TWI Using AVR MicrocontrollerDocument9 pagesProgramming I2C/TWI Using AVR MicrocontrollerAzam RafiquePas encore d'évaluation
- High Efficiency RF and Microwave Solid State Power AmplifiersD'EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersÉvaluation : 1 sur 5 étoiles1/5 (1)
- Lvds Thesis 1Document27 pagesLvds Thesis 1Avinash ThotaPas encore d'évaluation
- Programming PIC MCU PDFDocument117 pagesProgramming PIC MCU PDFletrongtan00100% (4)
- Implementation of Uart and Ethernet Using FpgaDocument15 pagesImplementation of Uart and Ethernet Using FpgaBANDARU SRI RAM SAI GANESH BANDARU SRI RAM SAI GANESHPas encore d'évaluation
- Modbus ManualDocument93 pagesModbus ManualjunsanaPas encore d'évaluation
- RS485 & RS422 BasicsDocument6 pagesRS485 & RS422 Basicslaoxdat100% (1)
- Serial PortDocument31 pagesSerial Porttariq7868100% (2)
- l3 - Part 2 - Computer Buses - v22Document35 pagesl3 - Part 2 - Computer Buses - v22Pham Xuan ThuyPas encore d'évaluation
- 9-Serial Comm (Autosaved)Document48 pages9-Serial Comm (Autosaved)M ADNAN Z100% (1)
- Serial Interfaces I2C, Spi, I2SDocument37 pagesSerial Interfaces I2C, Spi, I2Seugen lupu100% (2)
- Essential Electronics & Microcontrollers: FYS3240-4240 Data Acquisition & ControlDocument26 pagesEssential Electronics & Microcontrollers: FYS3240-4240 Data Acquisition & ControljackPas encore d'évaluation
- Microcontroller BasicsDocument19 pagesMicrocontroller BasicsMohammed AliPas encore d'évaluation
- Micro InterfacingDocument31 pagesMicro InterfacingVinod KumarPas encore d'évaluation
- Lecture Notes 2Document42 pagesLecture Notes 2Prabal RawatPas encore d'évaluation
- Serial Interfaces, Part Deux C and SPI: December 4, 2002 Presented by Eugene HoDocument18 pagesSerial Interfaces, Part Deux C and SPI: December 4, 2002 Presented by Eugene HoPronadeep BoraPas encore d'évaluation
- Io Ports - CommunicationDocument42 pagesIo Ports - CommunicationRajesh KonePas encore d'évaluation
- T3 Serial CommunicationsDocument67 pagesT3 Serial Communicationschaudhary kiranPas encore d'évaluation
- Micro InterfacingDocument15 pagesMicro InterfacingDeepesh KhanejaPas encore d'évaluation
- Block Diagram of Intel Atom ProcessorDocument23 pagesBlock Diagram of Intel Atom Processorfestio94Pas encore d'évaluation
- Interfacing MCDocument57 pagesInterfacing MCMaha DevanPas encore d'évaluation
- KBS SerialPortDocument59 pagesKBS SerialPortMurugadas HarnanPas encore d'évaluation
- I2C Serial Communication Protocol: Inter Integrated CircuitDocument7 pagesI2C Serial Communication Protocol: Inter Integrated CircuitSameer NandagavePas encore d'évaluation
- Re - Understanding Caffe - IoDocument1 pageRe - Understanding Caffe - Iojustme8Pas encore d'évaluation
- C4 Comparing StructureDocument2 pagesC4 Comparing Structurejustme8100% (1)
- Accounting ImagesDocument1 pageAccounting Imagesjustme8Pas encore d'évaluation
- AaaDocument2 pagesAaajustme8Pas encore d'évaluation
- 55W 17291 6 0Document28 pages55W 17291 6 0justme8Pas encore d'évaluation
- Elec2219 Fd+tas 2015@usmc PDFDocument7 pagesElec2219 Fd+tas 2015@usmc PDFjustme8Pas encore d'évaluation
- First Coursework Sheet ELEC2220 Control and CommunicationsDocument3 pagesFirst Coursework Sheet ELEC2220 Control and Communicationsjustme8Pas encore d'évaluation
- ADocument1 pageAjustme8Pas encore d'évaluation
- Embedded CDocument37 pagesEmbedded Cchithrasreemod100% (1)
- "LCD.H": Main (Init - LCD Display - String )Document5 pages"LCD.H": Main (Init - LCD Display - String )justme8Pas encore d'évaluation
- Student Profile Maintenance University of Southampton Malaysia CampusDocument2 pagesStudent Profile Maintenance University of Southampton Malaysia Campusjustme8Pas encore d'évaluation
- EE-606: Solid State Devices: Lecture 2: Geometry of Periodic CrystalsDocument27 pagesEE-606: Solid State Devices: Lecture 2: Geometry of Periodic CrystalspiksyPas encore d'évaluation
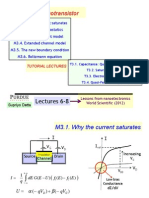
- Optical TransistorDocument3 pagesOptical Transistorjustme8Pas encore d'évaluation
- Multiple Choice QuestionsDocument51 pagesMultiple Choice QuestionsHem Jain100% (1)
- Simplified Rules in Limits To InfinityDocument3 pagesSimplified Rules in Limits To Infinityjustme8Pas encore d'évaluation
- 5 OptoelectronicsDocument62 pages5 OptoelectronicsMicro EmissionPas encore d'évaluation
- Spring MassDocument12 pagesSpring Massjustme8Pas encore d'évaluation
- Spring MassDocument12 pagesSpring Massjustme8Pas encore d'évaluation
- Electrostatic Potential EnergyDocument2 pagesElectrostatic Potential Energyjustme8Pas encore d'évaluation
- Integrate Cos - 1xDocument4 pagesIntegrate Cos - 1xjustme8Pas encore d'évaluation
- Flip-Flops & Sequential CircuitsDocument7 pagesFlip-Flops & Sequential Circuitsmanishbhardwaj8131Pas encore d'évaluation
- 3-Frequency Dependent CircuitsDocument63 pages3-Frequency Dependent CircuitsDaisy PriyaPas encore d'évaluation
- Integrate Cos - 1xDocument4 pagesIntegrate Cos - 1xjustme8Pas encore d'évaluation
- Week5 HomeworkDocument2 pagesWeek5 Homeworkjustme8Pas encore d'évaluation
- Week3 Lecture SlidesDocument11 pagesWeek3 Lecture Slidesjustme8Pas encore d'évaluation
- PolarizationDocument2 pagesPolarizationjustme8100% (1)
- Week4 HomeworkDocument2 pagesWeek4 Homeworkjustme8Pas encore d'évaluation
- 携带照相机者名单Document1 page携带照相机者名单justme8Pas encore d'évaluation
- Data Communication & Networking MCQs For IBPS IT Specialist OfficerDocument227 pagesData Communication & Networking MCQs For IBPS IT Specialist OfficerchapoonkzPas encore d'évaluation
- CCENT Certification All-In-One For Dummies: Cheat SheetDocument17 pagesCCENT Certification All-In-One For Dummies: Cheat SheetBayac Ramehr50% (2)
- Naganath: Key Skills Profile SummaryDocument4 pagesNaganath: Key Skills Profile SummarySendil KumarPas encore d'évaluation
- Executive's Guide To Software-Defined NetworkingDocument24 pagesExecutive's Guide To Software-Defined Networkingiica98100% (1)
- GT30 User Manual V6.1Document20 pagesGT30 User Manual V6.1GlennPas encore d'évaluation
- Curriculum VitaeDocument3 pagesCurriculum Vitae1dzrbtcom ProfessionalprogramminglanguagePas encore d'évaluation
- Progress WebclientDocument4 pagesProgress WebclientsdawdwsqPas encore d'évaluation
- 3com S2900-CMW520-R1101P09 Usage GuidelinesDocument11 pages3com S2900-CMW520-R1101P09 Usage GuidelinesMichael AdornoPas encore d'évaluation
- E3: AT Commands by SSCOMDocument4 pagesE3: AT Commands by SSCOMCENTRAL UNITRACKERPas encore d'évaluation
- Pervasive Computing Lecture NotesDocument6 pagesPervasive Computing Lecture NotesVaishali RaviPas encore d'évaluation
- MPLS FaqDocument6 pagesMPLS FaqPrime RidesPas encore d'évaluation
- 1KHW001489-En Instruction Manual ETL600R3 (June 2012, Annex Updated March 2014)Document486 pages1KHW001489-En Instruction Manual ETL600R3 (June 2012, Annex Updated March 2014)Carlos Sulca NeiraPas encore d'évaluation
- TechCorner 15 - C-More Remote Access, Data Log, FTP File Transfer, and Email (Tutorial)Document15 pagesTechCorner 15 - C-More Remote Access, Data Log, FTP File Transfer, and Email (Tutorial)QuantumAutomationPas encore d'évaluation
- OTN-N215 Node: Open Transport Network (OTN)Document2 pagesOTN-N215 Node: Open Transport Network (OTN)mahroo_mirtaheriPas encore d'évaluation
- Rancangan Kebutuhan Lab TKJDocument9 pagesRancangan Kebutuhan Lab TKJRio HandokoPas encore d'évaluation
- NE40 SpecificationsDocument4 pagesNE40 Specificationsjarvik_gaPas encore d'évaluation
- Sdh/Sonet: Alarms & Performance MonitoringDocument141 pagesSdh/Sonet: Alarms & Performance MonitoringMohammed KumaylPas encore d'évaluation
- Cs601 Final Term Solve by Vu - ToperDocument112 pagesCs601 Final Term Solve by Vu - ToperUnknown UserPas encore d'évaluation
- Phoenix Contact Wlan5100Document96 pagesPhoenix Contact Wlan5100DanangBiantaraPas encore d'évaluation
- 2022-09-13 Cajas Electricidad Domoticas X Wifi - AMAZONDocument4 pages2022-09-13 Cajas Electricidad Domoticas X Wifi - AMAZONmr. guyPas encore d'évaluation
- MODBUSDocument9 pagesMODBUSSana KhanPas encore d'évaluation
- DSA For LTE Networks Why Dynamic SIM Allocation?Document2 pagesDSA For LTE Networks Why Dynamic SIM Allocation?LL ABPas encore d'évaluation
- 9.7.1: Packet Tracer Skills Integration Challenge Activity: Topology DiagramDocument4 pages9.7.1: Packet Tracer Skills Integration Challenge Activity: Topology DiagramEugene Embalzado Jr.Pas encore d'évaluation
- New OXE Features Introduced in OXE R12.4/M5.204.2.b/M5.204.7.cDocument51 pagesNew OXE Features Introduced in OXE R12.4/M5.204.2.b/M5.204.7.clocuras34100% (1)
- Usb3gig User Guide88Document10 pagesUsb3gig User Guide88IntikhabPas encore d'évaluation
- DCN Lab Final PaperDocument27 pagesDCN Lab Final PaperArsalan IshtiaqPas encore d'évaluation
- MPLS-TP and T-MPLSDocument11 pagesMPLS-TP and T-MPLS万尼杨Pas encore d'évaluation
- Juniper MX Sub MGMTDocument249 pagesJuniper MX Sub MGMTManaf Al OqlahPas encore d'évaluation
- Network Design AssignmentDocument2 pagesNetwork Design AssignmentFelixonah HunchoPas encore d'évaluation
- A Survey of Dos Attack and Its CountermeasuresDocument9 pagesA Survey of Dos Attack and Its CountermeasuresNurul Atikah100% (1)