Vous aimerez peut-être aussi
- Unidad 2 Programación CNC (Parte 2)Document13 pagesUnidad 2 Programación CNC (Parte 2)Samanta AranaPas encore d'évaluation
- Resumen Control Numerico y Robotica IndustrialDocument2 pagesResumen Control Numerico y Robotica IndustrialDavid Hill50% (2)
- Resumen Control Numerico y Robotica Insutrial, Hercilia CabreraDocument9 pagesResumen Control Numerico y Robotica Insutrial, Hercilia CabreraHERCILIA EUNICE CABRERA DIVASPas encore d'évaluation
- Principio de FuncionamientoDocument2 pagesPrincipio de FuncionamientoBRAYAN ESTEVEZPas encore d'évaluation
- Cad Cam Control NumericoDocument17 pagesCad Cam Control NumericoJuan GimenezPas encore d'évaluation
- El Control Numérico o Control Decimal NuméricoDocument3 pagesEl Control Numérico o Control Decimal NuméricoLuis NavaPas encore d'évaluation
- Informe - Centro de Mecanizado CNCDocument6 pagesInforme - Centro de Mecanizado CNCRafael ChaparroPas encore d'évaluation
- Tutorial de Programación de CNCDocument19 pagesTutorial de Programación de CNCJulia GomezPas encore d'évaluation
- CNC controla movimientos fabricaciónDocument7 pagesCNC controla movimientos fabricaciónEsk SosaPas encore d'évaluation
- Clasificación de Los Tipos de Control Numérico - Equipo 2 (Hernandez, Aviles, Medina, Tzab)Document6 pagesClasificación de Los Tipos de Control Numérico - Equipo 2 (Hernandez, Aviles, Medina, Tzab)Rafael Hernandez GuerreroPas encore d'évaluation
- Control Numerico ComputarizadoDocument14 pagesControl Numerico ComputarizadoCesar Emilio AguilarPas encore d'évaluation
- Presentación Manufactura CNC 232604Document36 pagesPresentación Manufactura CNC 232604Susy FgPas encore d'évaluation
- Principios básicos de CNCDocument15 pagesPrincipios básicos de CNCJesus Perez Perez100% (1)
- Procesos de Manufactura Con CNCDocument9 pagesProcesos de Manufactura Con CNCRoberto Magaña GarciaPas encore d'évaluation
- Control NumericoDocument11 pagesControl NumericoJORGE ENRIQUE GUTIERREZ ROLDANPas encore d'évaluation
- Tarea 1Document17 pagesTarea 1Luis VazquezPas encore d'évaluation
- CNCDocument7 pagesCNCjhimbo12Pas encore d'évaluation
- Cap 7Document139 pagesCap 7Areli MuñozPas encore d'évaluation
- Control Numerico Computarizado (CNC) .Document21 pagesControl Numerico Computarizado (CNC) .Alexis Millan0% (1)
- Control Numero Computarizado (CNC)Document4 pagesControl Numero Computarizado (CNC)santiago100% (1)
- Resumen Unidad 1 ControlDocument10 pagesResumen Unidad 1 Control007skyline001100% (1)
- Optativa 1Document5 pagesOptativa 1Jose Reyes Olvera baezaPas encore d'évaluation
- Gustavo CNCDocument10 pagesGustavo CNCremixscitoPas encore d'évaluation
- Control Numérico Computarizado e Impresora 3dDocument14 pagesControl Numérico Computarizado e Impresora 3dAndres PatiñoPas encore d'évaluation
- Control Numérico Unidad 3Document18 pagesControl Numérico Unidad 3Luis GuerreroPas encore d'évaluation
- Man 8055m ExaDocument11 pagesMan 8055m ExaEdgardo BadanoPas encore d'évaluation
- CNC y CodigosDocument10 pagesCNC y CodigosJose CurielPas encore d'évaluation
- Funciones de Interpolacion CNCDocument9 pagesFunciones de Interpolacion CNCjosuerichardriveraparedesPas encore d'évaluation
- Resumen Ejecutivo CNCDocument3 pagesResumen Ejecutivo CNCdaf1830Pas encore d'évaluation
- Manufactura Asistida Por ComputadoraDocument11 pagesManufactura Asistida Por ComputadoranestorPas encore d'évaluation
- Control NuméricoDocument28 pagesControl NuméricoPOLLO12394% (17)
- Control Numérico Por Computador1Document2 pagesControl Numérico Por Computador1Pedro DíazPas encore d'évaluation
- Control numérico y robótica industrialDocument2 pagesControl numérico y robótica industrialAlexPas encore d'évaluation
- Manual Centro de Maquinado CNCDocument49 pagesManual Centro de Maquinado CNCRaquel GonzalezPas encore d'évaluation
- Unidad 3 Programacion CNCDocument158 pagesUnidad 3 Programacion CNCgusuarzhdzPas encore d'évaluation
- Control numérico: fundamentos y programaciónDocument62 pagesControl numérico: fundamentos y programaciónedprezPas encore d'évaluation
- Manual Centro de Maquinado CNC (1.3) PDFDocument49 pagesManual Centro de Maquinado CNC (1.3) PDFJuan Blancas100% (1)
- Manual de Fresadora de CNC Triac FapucDocument39 pagesManual de Fresadora de CNC Triac FapucJOCOVI1987Pas encore d'évaluation
- Maquinas Herramientas CNCDocument17 pagesMaquinas Herramientas CNCdavidPas encore d'évaluation
- CNC ReporteDocument17 pagesCNC Reporteernesto9100% (2)
- Centro de Mecanizado CNCDocument99 pagesCentro de Mecanizado CNCJhon CastroPas encore d'évaluation
- Apunte Nuevo Curso CNCDocument31 pagesApunte Nuevo Curso CNCEstevez Corena ExequielPas encore d'évaluation
- Sistemas de control numérico: historia y componentes básicosDocument79 pagesSistemas de control numérico: historia y componentes básicosJavier Paredes AvilaPas encore d'évaluation
- Máquina CNCDocument7 pagesMáquina CNCFernando Javier FrancoPas encore d'évaluation
- Características y Tipos de Sistemas CNCDocument7 pagesCaracterísticas y Tipos de Sistemas CNCNelly ChaconPas encore d'évaluation
- UNIDAD 1 Fundamentos Básicos e Introducción Al CNCDocument38 pagesUNIDAD 1 Fundamentos Básicos e Introducción Al CNCNassim asenPas encore d'évaluation
- Marco TeoricoDocument34 pagesMarco TeoricoFranciscoPas encore d'évaluation
- Introducción Al C NDocument4 pagesIntroducción Al C NElmer Gabriel Chan PechPas encore d'évaluation
- Máquinas CNCDocument5 pagesMáquinas CNCOMAR FERNANDO CARRILLO ALVARADOPas encore d'évaluation
- Practica 2Document27 pagesPractica 2pumakrakerPas encore d'évaluation
- Fase 2 CNC AporteDocument7 pagesFase 2 CNC AporteHarold Favian Diaz LeonisPas encore d'évaluation
- Fresadora CNCDocument20 pagesFresadora CNCVictor Manuel Garcia RamirezPas encore d'évaluation
- Sistemas CAD/CAM y fabricación asistida por ordenadorDocument16 pagesSistemas CAD/CAM y fabricación asistida por ordenadoredgar100% (1)
- Sistema de Coordenadas y Control de MovimientosDocument2 pagesSistema de Coordenadas y Control de MovimientosJorge Canales100% (1)
- Informe CNC (Recuperado)Document21 pagesInforme CNC (Recuperado)Chris RoblesPas encore d'évaluation
- Control Numérico: Ir A La Navegaciónir A La BúsquedaDocument2 pagesControl Numérico: Ir A La Navegaciónir A La BúsquedaJosé Ignacio Aguilar PérezPas encore d'évaluation
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109D'EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Pas encore d'évaluation
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalD'EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalÉvaluation : 5 sur 5 étoiles5/5 (4)
- Especificaciones técnicas en procesos de mecanizado por corte y conformado. FMEH0209D'EverandEspecificaciones técnicas en procesos de mecanizado por corte y conformado. FMEH0209Pas encore d'évaluation
- Elaboración de programas de CNC para la fabricación de piezas por corte y conformado. FMEH0209D'EverandElaboración de programas de CNC para la fabricación de piezas por corte y conformado. FMEH0209Pas encore d'évaluation
- ValvulasDocument1 pageValvulasBacilio MartinezPas encore d'évaluation
- ValvulasDocument1 pageValvulasBacilio MartinezPas encore d'évaluation
- Costos y PresupuestosDocument209 pagesCostos y PresupuestosDaniel Cab SalazarPas encore d'évaluation
- Norma de CodigosDocument1 pageNorma de CodigosBacilio MartinezPas encore d'évaluation
- Fórmulas Empíricas para Pérdidas en TuberiasDocument9 pagesFórmulas Empíricas para Pérdidas en TuberiasDanilo Portillo PatiñoPas encore d'évaluation
- Sprinter 15Document11 pagesSprinter 15Bacilio MartinezPas encore d'évaluation
- Plastic OsDocument47 pagesPlastic OsCarlos Choton AbantoPas encore d'évaluation
- Cono 1000 X 460 PDFDocument2 pagesCono 1000 X 460 PDFBacilio MartinezPas encore d'évaluation
- 019613Document1 page019613Bacilio MartinezPas encore d'évaluation
- Lista de ProveedoresDocument4 pagesLista de ProveedoresBacilio MartinezPas encore d'évaluation
- CPE Tecsup Trujillo Septiembre - Diciembre 2017Document2 pagesCPE Tecsup Trujillo Septiembre - Diciembre 2017Bacilio MartinezPas encore d'évaluation
- Sheet Metal Parameters AlibreDocument7 pagesSheet Metal Parameters AlibreJohn HenryPas encore d'évaluation
- Sprinter 12Document14 pagesSprinter 12Bacilio MartinezPas encore d'évaluation
- Formato Check List1Document1 pageFormato Check List1Luigi Mendoza JiibajaPas encore d'évaluation
- Sistema Electrohidraulico-Bravo 180s - Full 3000Document13 pagesSistema Electrohidraulico-Bravo 180s - Full 3000Bacilio MartinezPas encore d'évaluation
- Tesis de Grado Anell-AlexDocument208 pagesTesis de Grado Anell-AlexBacilio MartinezPas encore d'évaluation
- Docent eDocument1 pageDocent eBacilio MartinezPas encore d'évaluation
- Escena NDocument1 pageEscena NBacilio MartinezPas encore d'évaluation
- LCH-Procesos laminado acero calienteDocument13 pagesLCH-Procesos laminado acero calienteEdson AbelPas encore d'évaluation
- Constancia de Aprobacion CortezDocument1 pageConstancia de Aprobacion CortezBacilio MartinezPas encore d'évaluation
- Anexo 4Document2 pagesAnexo 4Bacilio MartinezPas encore d'évaluation
- Suspension para GranaleroDocument2 pagesSuspension para GranaleroBacilio MartinezPas encore d'évaluation
- Anexo 3Document2 pagesAnexo 3Bacilio MartinezPas encore d'évaluation
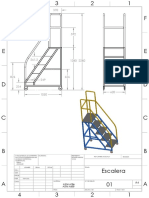
- ESACALERADocument1 pageESACALERABacilio MartinezPas encore d'évaluation
- EsacaleraDocument1 pageEsacaleraBacilio MartinezPas encore d'évaluation
- EsacaleraDocument1 pageEsacaleraBacilio MartinezPas encore d'évaluation
- Fabricacion y Servicios Multiples Uceda SDocument1 pageFabricacion y Servicios Multiples Uceda SBacilio MartinezPas encore d'évaluation
- Autocad y Solidworks LinkbucksDocument3 pagesAutocad y Solidworks LinkbucksJoel VasquezPas encore d'évaluation
- Muelle Tercer EjeDocument10 pagesMuelle Tercer EjeBacilio MartinezPas encore d'évaluation
- Calculo de La PaltaDocument24 pagesCalculo de La PaltaBacilio MartinezPas encore d'évaluation
- CNC 8025 T manuales erroresDocument308 pagesCNC 8025 T manuales erroresFrancisco Lopez NavesPas encore d'évaluation
- CENTRO DE MECANIZADO CNC DMTG VDL-1300 TCDocument3 pagesCENTRO DE MECANIZADO CNC DMTG VDL-1300 TCCotizaciones TalentoPas encore d'évaluation
- Examen Sistemas MecatronicosDocument17 pagesExamen Sistemas MecatronicosLuis Alberto NegretePas encore d'évaluation
- Fabricacion de Un Molde Prototipo para Un Rin de Una Llanta PDFDocument129 pagesFabricacion de Un Molde Prototipo para Un Rin de Una Llanta PDFDIEGO ARMANDO VANEGAS DUQUEPas encore d'évaluation
- Fabricación de Barrenadora PortatilDocument113 pagesFabricación de Barrenadora PortatilAlexander Ching Alvarez100% (2)
- Programación CNC torno FanucDocument127 pagesProgramación CNC torno FanucJimmy Carlos Tone LimaPas encore d'évaluation
- Manual Operaciones 8035-TDocument232 pagesManual Operaciones 8035-TJr' OntthiverosPas encore d'évaluation
- Manual de Usuario Router ASPI Panel OfflineDocument44 pagesManual de Usuario Router ASPI Panel Offlineyonathan guerraPas encore d'évaluation
- Guía de aprendizaje sobre automatización industrial y sus componentesDocument7 pagesGuía de aprendizaje sobre automatización industrial y sus componentesRicardo CondePas encore d'évaluation
- Fernandez Banda Emmanuel TesisDocument24 pagesFernandez Banda Emmanuel TesisGonzalo FernandezPas encore d'évaluation
- Estructura de Un Programa CNCDocument27 pagesEstructura de Un Programa CNCtiburon_asesino4400100% (1)
- Butaca ergonómica estudiantilDocument32 pagesButaca ergonómica estudiantilfrancisco fernandez vazquezPas encore d'évaluation
- Coordenadas CNCDocument19 pagesCoordenadas CNCErick Flores Olivares100% (3)
- Varillas de Bombeo MecánicoDocument8 pagesVarillas de Bombeo MecánicoJuan Simon Soto CastilloPas encore d'évaluation
- Informe TornoDocument12 pagesInforme TornoLuis Fernando LaverdePas encore d'évaluation
- Tecnico Mantenimiento Mecanico de Maquinaria IndustrialDocument26 pagesTecnico Mantenimiento Mecanico de Maquinaria IndustrialMecanizado SenaPas encore d'évaluation
- Historia Del Torno ManufacturaDocument7 pagesHistoria Del Torno ManufacturaIsrael_jasidPas encore d'évaluation
- Perfil Competencia Mantenedor Electronico de Maquinas Herramientas ConvencionalesDocument3 pagesPerfil Competencia Mantenedor Electronico de Maquinas Herramientas ConvencionalesRoberto Vera RamosPas encore d'évaluation
- Tecnología Mecánica Básica 2017278 ProgramaDocument14 pagesTecnología Mecánica Básica 2017278 ProgramaPachajoa FelipePas encore d'évaluation
- Protocolos de Comunicaciones IndustrialesDocument9 pagesProtocolos de Comunicaciones IndustrialesErick Fernando RivasPas encore d'évaluation
- Práctica 2 Puesta A Punto Del Torno ViwaDocument9 pagesPráctica 2 Puesta A Punto Del Torno ViwaJosé Ávila BPas encore d'évaluation
- Cad Cam 3Document7 pagesCad Cam 3Roberto AlemanPas encore d'évaluation
- E01 Interaccion A Pie de Maquina Con Torno CNCDocument12 pagesE01 Interaccion A Pie de Maquina Con Torno CNCNext MillPas encore d'évaluation
- Semana 11 Cam Torno CNC Rosca 2020-20Document66 pagesSemana 11 Cam Torno CNC Rosca 2020-20Jhon TantaleanPas encore d'évaluation
- Insertos para TornoDocument5 pagesInsertos para TornoIsmael Fg100% (1)
- 08 0724 MDocument231 pages08 0724 Mkeeviin224Pas encore d'évaluation
- Códigos CNCDocument4 pagesCódigos CNCAldnoah_LordPas encore d'évaluation
- Tipos de Máquina CNCDocument6 pagesTipos de Máquina CNCDavid James RodriguezPas encore d'évaluation
- Unidad 1 Introduccic3b3n Al Cad Cam CaeDocument13 pagesUnidad 1 Introduccic3b3n Al Cad Cam CaeLuis Fredy Sanchez DiazPas encore d'évaluation