Vous aimerez peut-être aussi
- Arm7 Interfacing Examples PDFDocument21 pagesArm7 Interfacing Examples PDFDenise NelsonPas encore d'évaluation
- Intelligent Water Control System Using 8051 (AT89C51) : Project ReportDocument12 pagesIntelligent Water Control System Using 8051 (AT89C51) : Project ReportNadeem AnjumPas encore d'évaluation
- Unit 5 NotesDocument25 pagesUnit 5 NoteskaustubhPas encore d'évaluation
- Handson Technology: 1 Channel 5V Optical Isolated Relay ModuleDocument9 pagesHandson Technology: 1 Channel 5V Optical Isolated Relay ModuleRifhando NadeakPas encore d'évaluation
- ESD NPTEL SummaryDocument47 pagesESD NPTEL SummaryrahulpikalePas encore d'évaluation
- Automated parking system detects empty slotsDocument27 pagesAutomated parking system detects empty slotsJust4 Shop100% (1)
- Microprocessor and Systems Lab Electrical Engineering Uet Taxila Home AutomationDocument12 pagesMicroprocessor and Systems Lab Electrical Engineering Uet Taxila Home AutomationKashif HassanPas encore d'évaluation
- 2Ch Relay PDFDocument7 pages2Ch Relay PDFkrlos_adrianPas encore d'évaluation
- Expand Port ArduinoDocument8 pagesExpand Port Arduino5tificoPas encore d'évaluation
- Training Program Day2 RAKESHDocument56 pagesTraining Program Day2 RAKESHtansnvarmaPas encore d'évaluation
- LPC2148Document5 pagesLPC2148kaushikei22Pas encore d'évaluation
- Peripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!Document44 pagesPeripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!malhiavtarsinghPas encore d'évaluation
- Emb Lab ManualDocument73 pagesEmb Lab ManualBharath RamanPas encore d'évaluation
- XC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBDocument8 pagesXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBnareshhhhhPas encore d'évaluation
- Embedded SystemsDocument12 pagesEmbedded SystemsAl-Amin BhuiyanPas encore d'évaluation
- Iot Unit 2 & 3Document22 pagesIot Unit 2 & 3lakshmiPas encore d'évaluation
- Description Alternate Function: SFDFDGFBGFDocument8 pagesDescription Alternate Function: SFDFDGFBGFnareshhhhhPas encore d'évaluation
- Spark V Exp 2Document7 pagesSpark V Exp 2yogeshPas encore d'évaluation
- Studentcompanion - Co.za-Connecting Light Emitting Diodes LED To A PIC Microcontroller XC8 PDFDocument5 pagesStudentcompanion - Co.za-Connecting Light Emitting Diodes LED To A PIC Microcontroller XC8 PDFreemasajinPas encore d'évaluation
- Atmega16 Microcontroller Pinout and InterruptsDocument8 pagesAtmega16 Microcontroller Pinout and InterruptsnareshhhhhPas encore d'évaluation
- Sdsafgdshgfvnbvnvnvnb: Description Alternate FunctionDocument8 pagesSdsafgdshgfvnbvnvnvnb: Description Alternate FunctionnareshhhhhPas encore d'évaluation
- 2Ch RelayDocument9 pages2Ch RelayD3TE MuhammadJoharWahyuAnandaPas encore d'évaluation
- ES RecordDocument39 pagesES Recordramachandran061185Pas encore d'évaluation
- Xddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionDocument8 pagesXddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionnareshhhhhPas encore d'évaluation
- Industrial Fault Indication System With Over Voltage Over TemperatureDocument46 pagesIndustrial Fault Indication System With Over Voltage Over Temperaturedivanshu16decPas encore d'évaluation
- Arduino Project Burglar Zone Input TesterDocument4 pagesArduino Project Burglar Zone Input TesterCezary Jan JaronczykPas encore d'évaluation
- Automatic Room Light ControllerDocument36 pagesAutomatic Room Light Controllerlove2honney100% (1)
- Input Output Port and InterfacingDocument44 pagesInput Output Port and Interfacingsk087510100% (1)
- ES Lab FileDocument37 pagesES Lab FileMøhït JáñgírPas encore d'évaluation
- ARM Embedded Controller ManualDocument28 pagesARM Embedded Controller ManualGagan NaiduPas encore d'évaluation
- TRISC 0 // Set Direction To Be Output 0 Output 1 InputDocument7 pagesTRISC 0 // Set Direction To Be Output 0 Output 1 Inputiri_scribdPas encore d'évaluation
- MAX6956 Programming GuideDocument5 pagesMAX6956 Programming GuideJonathan JaegerPas encore d'évaluation
- Digital Theromometer Using 8051Document17 pagesDigital Theromometer Using 8051BALASUBRAMANIAN N BALASUBRAMANIAN NPas encore d'évaluation
- 2.7GHz Frequency Synthesizer IC GuideDocument15 pages2.7GHz Frequency Synthesizer IC GuideVanderlei MarcariniPas encore d'évaluation
- Esd Lab - 9Document19 pagesEsd Lab - 9Jampani sarath chandraPas encore d'évaluation
- HBridgeMotorControl With PICDocument11 pagesHBridgeMotorControl With PICcoceicr100% (3)
- Pic Example2Document6 pagesPic Example2UYeMin HtikePas encore d'évaluation
- Chapter 1. OverviewDocument58 pagesChapter 1. OverviewmgitecetechPas encore d'évaluation
- MCP2016 16 Bit I-O I2C PDFDocument38 pagesMCP2016 16 Bit I-O I2C PDFwhynot05Pas encore d'évaluation
- Micro Lab 6Document10 pagesMicro Lab 6Hacker YousafzaiPas encore d'évaluation
- Tty To Rs232Document8 pagesTty To Rs232sandeepverma8257100% (2)
- Hardware Kit:: LAB-6 Date: 12/03/18Document15 pagesHardware Kit:: LAB-6 Date: 12/03/18Devanshi HindkaPas encore d'évaluation
- MicrocontrollerDocument25 pagesMicrocontrollersupriyaPas encore d'évaluation
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnPas encore d'évaluation
- Digital Thermometer Final ReportDocument22 pagesDigital Thermometer Final Reportrayedkhan100% (1)
- ShortTest2-2016 SolutionDocument2 pagesShortTest2-2016 SolutionYash MaharajPas encore d'évaluation
- Module 4 Embedded SystemsDocument51 pagesModule 4 Embedded SystemsnpottiPas encore d'évaluation
- Rtes L 7-9Document4 pagesRtes L 7-9Xyed Haider BukhariPas encore d'évaluation
- Analog Device Micro ConverterDocument20 pagesAnalog Device Micro ConvertershaileshPas encore d'évaluation
- Programming The MSP430 For Data Acquisition and Processing: Application NoteDocument6 pagesProgramming The MSP430 For Data Acquisition and Processing: Application NoteJarfoPas encore d'évaluation
- Evd19i018-Esdp Lab 9Document18 pagesEvd19i018-Esdp Lab 9Jampani sarath chandraPas encore d'évaluation
- Programming PIC16F877A Microcontroller for LED Pattern Display and Sensor ReadingDocument57 pagesProgramming PIC16F877A Microcontroller for LED Pattern Display and Sensor ReadingDoodee Mohammed100% (4)
- Bhuvnesh Yony ProjectDocument13 pagesBhuvnesh Yony ProjectbktonyPas encore d'évaluation
- Uninterruptible Power Supply Circuitry Design Apc Smartups 1000Document19 pagesUninterruptible Power Supply Circuitry Design Apc Smartups 1000Negru P. PlantatiePas encore d'évaluation
- LAB Manual - Microprocessor Lab - DraftDocument27 pagesLAB Manual - Microprocessor Lab - DraftVipin V APas encore d'évaluation
- Tsa5512 CNV 3Document21 pagesTsa5512 CNV 3soft4gsmPas encore d'évaluation
- Experiment 20: infrared remote control: 1、Infrared receiving head introductionDocument8 pagesExperiment 20: infrared remote control: 1、Infrared receiving head introductionSahbi Marrouchi100% (1)
- Code LockDocument3 pagesCode Lockpinku0077Pas encore d'évaluation
- How to Use an ADC PeripheralDocument37 pagesHow to Use an ADC PeripheralpatelgausPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- List of College Conduction M.SC - Chemistry PhysicsDocument12 pagesList of College Conduction M.SC - Chemistry PhysicscontrasterPas encore d'évaluation
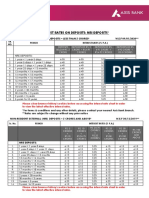
- Interest Rates On Domestic DepositsDocument3 pagesInterest Rates On Domestic Depositsvijay chPas encore d'évaluation
- Digital Multimeters 34460A, 34461A, 34465A (6 Digit), 34470A (7 Digit)Document28 pagesDigital Multimeters 34460A, 34461A, 34465A (6 Digit), 34470A (7 Digit)contrasterPas encore d'évaluation
- Tea1507 PDFDocument20 pagesTea1507 PDFmiltoncg100% (1)
- Brief On Pradhan Mantri Shram Yogi Maan-DhanDocument3 pagesBrief On Pradhan Mantri Shram Yogi Maan-DhanSreekala SudheeshPas encore d'évaluation
- Domestic Fixed Deposit Plus 18 1 2019 PDFDocument1 pageDomestic Fixed Deposit Plus 18 1 2019 PDFMukul ParasharPas encore d'évaluation
- Nri Callable Deposits Wef 09 01 2020Document3 pagesNri Callable Deposits Wef 09 01 2020contrasterPas encore d'évaluation
- Interest Rates On Domestic DepositsDocument3 pagesInterest Rates On Domestic Depositsvijay chPas encore d'évaluation
- Mobile WallpapersDocument12 pagesMobile WallpaperscontrasterPas encore d'évaluation
- Communication EngineeringDocument3 pagesCommunication EngineeringcontrasterPas encore d'évaluation
- En DM00462805Document26 pagesEn DM00462805contrasterPas encore d'évaluation
- Opa 615Document34 pagesOpa 615contrasterPas encore d'évaluation
- The Bold-Extra Package: Robin Fairbairns, Rf10@cam - Ac.uk November 2001Document1 pageThe Bold-Extra Package: Robin Fairbairns, Rf10@cam - Ac.uk November 2001RohitDhirPas encore d'évaluation
- Curriculum: Department of Electrical EngineeringDocument3 pagesCurriculum: Department of Electrical EngineeringcontrasterPas encore d'évaluation
- BTech ECE SyllabusDocument67 pagesBTech ECE SyllabuscontrasterPas encore d'évaluation
- TestDocument2 pagesTestcontrasterPas encore d'évaluation
- IIT Bombay Electrical Engineering MTech CurriculumDocument3 pagesIIT Bombay Electrical Engineering MTech CurriculumcontrasterPas encore d'évaluation
- MTECHBROUCHURE2016 1716marchDocument43 pagesMTECHBROUCHURE2016 1716marchcontrasterPas encore d'évaluation
- Wa0005 PDFDocument2 pagesWa0005 PDFsrinivasanPas encore d'évaluation
- 09cell NetworksDocument29 pages09cell NetworkscontrasterPas encore d'évaluation
- LM78XX, LM78XXA - 3-Terminal 1 A Positive Voltage RegulatorDocument5 pagesLM78XX, LM78XXA - 3-Terminal 1 A Positive Voltage RegulatorcontrasterPas encore d'évaluation
- BE 2008 Electronics&Telecommunication PDFDocument71 pagesBE 2008 Electronics&Telecommunication PDFcontrasterPas encore d'évaluation
- CNC Machining - Industrial Applications - PRV Engineering BlogPRV Engineering BlogDocument2 pagesCNC Machining - Industrial Applications - PRV Engineering BlogPRV Engineering BlogcontrasterPas encore d'évaluation
- S.E - SPL 2 30 3 16Document15 pagesS.E - SPL 2 30 3 16contrasterPas encore d'évaluation
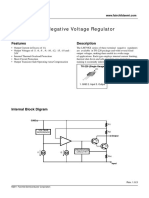
- LM7905Document4 pagesLM7905contrasterPas encore d'évaluation
- AN3114Document32 pagesAN3114contrasterPas encore d'évaluation
- Datasheet PhotodiodeDocument6 pagesDatasheet PhotodiodecontrasterPas encore d'évaluation
- T.E - Spl4 4 16Document19 pagesT.E - Spl4 4 16contrasterPas encore d'évaluation
- Ths 6002Document46 pagesThs 6002contrasterPas encore d'évaluation
- Tilt DetectorDocument7 pagesTilt DetectorcontrasterPas encore d'évaluation
- Phase Shift Oscillator Circuit AnalysisDocument13 pagesPhase Shift Oscillator Circuit AnalysisNafis Mustakin100% (1)
- An-Najah National University Electrical Engineering Dept Faculty of EngineeringDocument4 pagesAn-Najah National University Electrical Engineering Dept Faculty of EngineeringKhalid W Al-sheakhPas encore d'évaluation
- Project - Report PDFDocument22 pagesProject - Report PDFVasu ThakurPas encore d'évaluation
- E7 Data and Results PUT RELAXATION OSCILLATORDocument3 pagesE7 Data and Results PUT RELAXATION OSCILLATORAaron Cyril NuisaPas encore d'évaluation
- Assignment 3 - 304, DcsDocument9 pagesAssignment 3 - 304, Dcsramjee26Pas encore d'évaluation
- Silicon PNP Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon PNP Power Transistors: Savantic Semiconductor Product SpecificationNatal2i2Pas encore d'évaluation
- Delta Sigma ADCDocument22 pagesDelta Sigma ADCAlexandre KennedyPas encore d'évaluation
- Dhanaraj K.J., Asst - Professor, ECED, NITC: I e o C C e IDocument2 pagesDhanaraj K.J., Asst - Professor, ECED, NITC: I e o C C e IRitu RoyPas encore d'évaluation
- App Note 7nm - v7Document23 pagesApp Note 7nm - v7NelarapuMaheshPas encore d'évaluation
- CMOS Assignment QuestionsDocument6 pagesCMOS Assignment QuestionsAkhilGovindPas encore d'évaluation
- Digital IC Trainer KitDocument4 pagesDigital IC Trainer KitShimjith Pullaniparamb50% (2)
- Switch: CircuitDocument8 pagesSwitch: CircuitAndres MolinaPas encore d'évaluation
- Academic Year 2021/22: Analogue Analysis and Design (ENG530/P21402) Item 1 - CW1/Laboratory ExerciseDocument4 pagesAcademic Year 2021/22: Analogue Analysis and Design (ENG530/P21402) Item 1 - CW1/Laboratory ExerciseMaharshiGohelPas encore d'évaluation
- Datasheet LM3915 PDFDocument24 pagesDatasheet LM3915 PDFq7jrdhh6dgPas encore d'évaluation
- Wireless For The Warrior, Various Series No. 4, Philips DR 30Document5 pagesWireless For The Warrior, Various Series No. 4, Philips DR 30Louis MeulsteePas encore d'évaluation
- BJT Transistor QuestionsDocument4 pagesBJT Transistor Questionsankit kumar sharmaPas encore d'évaluation
- Digital EletronicDocument12 pagesDigital Eletronicom14440% (1)
- Balun DesignDocument6 pagesBalun DesignYouli TianPas encore d'évaluation
- Verilog QuestionsDocument2 pagesVerilog QuestionsSAI SREEKANTHPas encore d'évaluation
- Solution Manual For Digital Systems Design Using Verilog 1st Edition by RothDocument16 pagesSolution Manual For Digital Systems Design Using Verilog 1st Edition by Rotha19397263917% (6)
- 3-1. Curriculum ObjecivesDocument1 page3-1. Curriculum ObjecivesMharco ColipapaPas encore d'évaluation
- VLSI C - V CharacteristicsDocument24 pagesVLSI C - V CharacteristicsMALATHI .LPas encore d'évaluation
- Programmable Timer Counters with the 8254Document20 pagesProgrammable Timer Counters with the 8254Ayush DusejaPas encore d'évaluation
- ECE PEC 151 Exp 1 ManualDocument10 pagesECE PEC 151 Exp 1 ManualSumit ChauhanPas encore d'évaluation
- 9-Channel Level Shifter With Gate Voltage Shaping and Discharge FunctionsDocument26 pages9-Channel Level Shifter With Gate Voltage Shaping and Discharge Functions1Pas encore d'évaluation
- Electronics: Quarter 3 - Module 3: Radio Receiver CircuitDocument24 pagesElectronics: Quarter 3 - Module 3: Radio Receiver CircuitDalissa Rivadeniera100% (2)
- Sequential Logic Circuits Types and ApplicationsDocument66 pagesSequential Logic Circuits Types and ApplicationsAngelica FangonPas encore d'évaluation
- EE Con-2Document8 pagesEE Con-2shishirgupta2007Pas encore d'évaluation
- CD4051, CD4051-SMD CD4052, CD4052-SMD, CD4053, CD4053-SMD: Description FeaturesDocument12 pagesCD4051, CD4051-SMD CD4052, CD4052-SMD, CD4053, CD4053-SMD: Description FeaturesAsallimitPas encore d'évaluation
- Lampiran 1. Source CodeDocument31 pagesLampiran 1. Source CodeAinur RizkyPas encore d'évaluation