Vous aimerez peut-être aussi
- K0842000012015400406-07 Estimation - 2D Projective TransformationsDocument57 pagesK0842000012015400406-07 Estimation - 2D Projective TransformationsjeasdsdasdaPas encore d'évaluation
- Lec 09Document56 pagesLec 09xuanzhengxie726Pas encore d'évaluation
- CSL7450 C8Document12 pagesCSL7450 C8Chirag (B19CSE026)Pas encore d'évaluation
- Design of Filters For Daubechies Wavelet TransformDocument21 pagesDesign of Filters For Daubechies Wavelet TransformLance WilliamsPas encore d'évaluation
- Introduction To The Theory of Ferromagnetism: Problem SolvingDocument8 pagesIntroduction To The Theory of Ferromagnetism: Problem SolvingAnderson GarciaPas encore d'évaluation
- For The Following Matrices A.: A At+ I .. Equ. (I)Document3 pagesFor The Following Matrices A.: A At+ I .. Equ. (I)api-3861295Pas encore d'évaluation
- Eigen Function: PY-501 Assignment 3aDocument2 pagesEigen Function: PY-501 Assignment 3aRupesh KannanPas encore d'évaluation
- Transient GWDocument5 pagesTransient GWJin AhmedPas encore d'évaluation
- Synchronous Machine Pu ModelDocument11 pagesSynchronous Machine Pu ModelDinesh ShettyPas encore d'évaluation
- Ain't No SunshineDocument5 pagesAin't No SunshineRobert TaylorPas encore d'évaluation
- HW 3Document12 pagesHW 39872315Pas encore d'évaluation
- C. Mate Sup 1Document5 pagesC. Mate Sup 1oliver basurto michuePas encore d'évaluation
- Tema 3 - Respuesta FrecuencialDocument5 pagesTema 3 - Respuesta FrecuencialLuyi WangPas encore d'évaluation
- Applied Mathematics and Computation: Feng-Gong Lang, Xiao-Ping XuDocument8 pagesApplied Mathematics and Computation: Feng-Gong Lang, Xiao-Ping XuMaiah DinglasanPas encore d'évaluation
- Random VariablesDocument46 pagesRandom VariablesraachelongPas encore d'évaluation
- Assignment 1 - IPDocument1 pageAssignment 1 - IPsaddfPas encore d'évaluation
- Summary of RectilinearDocument11 pagesSummary of RectilinearKARIM OmaryPas encore d'évaluation
- 3d Maths Cheat Sheet: VectorsDocument1 page3d Maths Cheat Sheet: VectorsChrist Ian PalomaresPas encore d'évaluation
- Math 3171 Test1 Spring 2016 SolutionDocument5 pagesMath 3171 Test1 Spring 2016 SolutionSaidPas encore d'évaluation
- AV411 Navigation Systems and Sensors: Department of AvionicsDocument4 pagesAV411 Navigation Systems and Sensors: Department of AvionicsDJ GamingPas encore d'évaluation
- M2 2019 Parametric Equations Lecture Notes For SLSDocument13 pagesM2 2019 Parametric Equations Lecture Notes For SLScoyite8695Pas encore d'évaluation
- Suhu 40 Oc Suhu 50 OcDocument1 pageSuhu 40 Oc Suhu 50 OcRizki Fitriana DewiPas encore d'évaluation
- Problem 2.28 PDFDocument2 pagesProblem 2.28 PDFKauê BrittoPas encore d'évaluation
- Graphs of Sine and Cosine FunctionsDocument5 pagesGraphs of Sine and Cosine Functionssmtm06Pas encore d'évaluation
- Lecture 2 - Quantum CircuitsDocument50 pagesLecture 2 - Quantum Circuitshu jackPas encore d'évaluation
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghPas encore d'évaluation
- Least Squares and Kalman Filtering: Questions: Email Me, Namrata@ece - Gatech.eduDocument17 pagesLeast Squares and Kalman Filtering: Questions: Email Me, Namrata@ece - Gatech.eduOmar Zeb KhanPas encore d'évaluation
- Robotics1 Test2 09.12.17Document6 pagesRobotics1 Test2 09.12.17asalifew belachewPas encore d'évaluation
- Nonlinear Transient Analysis of Doubly CurvedDocument13 pagesNonlinear Transient Analysis of Doubly CurvedVenkata Swamy Naidu NeigapulaPas encore d'évaluation
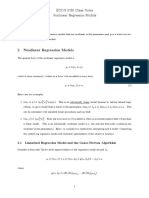
- ECON 5350 Class Notes Nonlinear Regression Models: 2.1 Linearized Regression Model and The Gauss-Newton AlgorithmDocument11 pagesECON 5350 Class Notes Nonlinear Regression Models: 2.1 Linearized Regression Model and The Gauss-Newton AlgorithmRaul SolesPas encore d'évaluation
- The Mathematics of Arbitrage 27Document1 pageThe Mathematics of Arbitrage 27Ibadul QadeerPas encore d'évaluation
- Homework 3 - 1D FDTD Update EquationsDocument2 pagesHomework 3 - 1D FDTD Update Equationspearl301010Pas encore d'évaluation
- Ducks On The PondDocument2 pagesDucks On The Pondilya neviditsinPas encore d'évaluation
- 5.thermodynamics and Statistical Physics NET-JRF VKSDocument30 pages5.thermodynamics and Statistical Physics NET-JRF VKSvijay_iete0% (1)
- Plotting and Transforming A Circle in 3D: C C C CDocument8 pagesPlotting and Transforming A Circle in 3D: C C C CAbdulmuttalip ÇekliPas encore d'évaluation
- AssignmentDocument2 pagesAssignmentAaqid BhatPas encore d'évaluation
- Problem 2.27: Given: Find: SolutionDocument1 pageProblem 2.27: Given: Find: SolutionKauê BrittoPas encore d'évaluation
- Mathematical Morphological ModelsDocument9 pagesMathematical Morphological Modelssalt2009Pas encore d'évaluation
- Inverse Kinematics-3Document51 pagesInverse Kinematics-3Nahom AlemnewPas encore d'évaluation
- 1974 AD, Pahilo Junema - Jaso Gara Je BhanaDocument7 pages1974 AD, Pahilo Junema - Jaso Gara Je BhanaAndreasPas encore d'évaluation
- Chapter 5 FourierDocument85 pagesChapter 5 Fourieryug varshneyPas encore d'évaluation
- Linear Functions (Straight Lines) General Form: + When M 0 When M 0Document10 pagesLinear Functions (Straight Lines) General Form: + When M 0 When M 0Nixnew LimPas encore d'évaluation
- Tut 2Document1 pageTut 2Catherine WhitewoodPas encore d'évaluation
- Docs Gate User GuideDocument2 pagesDocs Gate User GuideJinu AugustinePas encore d'évaluation
- Laplace 3rd Slide - Sin and Cos IntegralsDocument15 pagesLaplace 3rd Slide - Sin and Cos Integralsbeautyhowlader79Pas encore d'évaluation
- Chemical Bonding 1Document2 pagesChemical Bonding 1Jigyansa DashPas encore d'évaluation
- Portico Ejm ClaseayudDocument5 pagesPortico Ejm Claseayudalexander Rodriguez LenizPas encore d'évaluation
- ps3 Report PDFDocument6 pagesps3 Report PDFTalha YILMAZPas encore d'évaluation
- Geometric Phase in Quantum Theory - Pritam Sarkar - 201901000302038 - 2019UG038Document43 pagesGeometric Phase in Quantum Theory - Pritam Sarkar - 201901000302038 - 2019UG038Pritam SarkarPas encore d'évaluation
- QM Formula SheetDocument2 pagesQM Formula SheetdavitmatPas encore d'évaluation
- Lesson 2Document2 pagesLesson 2bonifacio gianga jrPas encore d'évaluation
- 2.1 - 2.4 DifferentiationDocument37 pages2.1 - 2.4 DifferentiationMUHAMMAD NOR FAISAL NOR SULAIMANPas encore d'évaluation
- MTK3005 Chapter 2Document5 pagesMTK3005 Chapter 2nurulattiyaPas encore d'évaluation
- Chapter 11, Solution 34Document1 pageChapter 11, Solution 34LUIS ALEXANDER RODRIGUEZ ZAPATAPas encore d'évaluation
- MSE3207 Lec18Document5 pagesMSE3207 Lec18Kasu NiPas encore d'évaluation
- 2018-Midsem SolnDocument5 pages2018-Midsem SolnRaj KumarPas encore d'évaluation
- The Chain Rule: 1 General MethodDocument4 pagesThe Chain Rule: 1 General MethodybPas encore d'évaluation
- Mathematical Tripos: Monday 11 June 2001 9 To 11Document4 pagesMathematical Tripos: Monday 11 June 2001 9 To 11KaustubhPas encore d'évaluation
- I / & P Á Þ o Æ I (MATH161) :, 0) X+ y 1, X 0, y 0. Ydy Xtan X X + Sec X, - X - 1Document3 pagesI / & P Á Þ o Æ I (MATH161) :, 0) X+ y 1, X 0, y 0. Ydy Xtan X X + Sec X, - X - 1서정민Pas encore d'évaluation
- 22.058 - Lecture 3a. Examples of Fourier TransformsDocument15 pages22.058 - Lecture 3a. Examples of Fourier TransformssriPas encore d'évaluation
- Medical ImagingDocument6 pagesMedical ImagingsriPas encore d'évaluation
- Linear Imaging Systems Example: The Pinhole Camera: OutlineDocument36 pagesLinear Imaging Systems Example: The Pinhole Camera: OutlinesriPas encore d'évaluation
- Robabilistic Egmentation: Computer Science and Engineering, Indian Institute of Technology KharagpurDocument63 pagesRobabilistic Egmentation: Computer Science and Engineering, Indian Institute of Technology KharagpursriPas encore d'évaluation
- Egmentation: Computer Science and Engineering, Indian Institute of Technology KharagpurDocument29 pagesEgmentation: Computer Science and Engineering, Indian Institute of Technology KharagpursriPas encore d'évaluation
- C V: T - V G: Omputer Ision Hree IEW EometryDocument15 pagesC V: T - V G: Omputer Ision Hree IEW EometrysriPas encore d'évaluation
- C V: C M: Omputer Ision Amera OdelsDocument53 pagesC V: C M: Omputer Ision Amera OdelssriPas encore d'évaluation
- C V: L S M: Omputer Ision East Quares InimizationDocument35 pagesC V: L S M: Omputer Ision East Quares InimizationsriPas encore d'évaluation
- C V: S V D: Omputer Ision Ingular Alue EcompositionDocument11 pagesC V: S V D: Omputer Ision Ingular Alue EcompositionsriPas encore d'évaluation
- C V: C C M: Omputer Ision Omputation of Amera AtrixDocument47 pagesC V: C C M: Omputer Ision Omputation of Amera AtrixsriPas encore d'évaluation
- C V: P G 3D: Omputer Ision Rojective EometryDocument15 pagesC V: P G 3D: Omputer Ision Rojective EometrysriPas encore d'évaluation
- Micro Cantilever Bio DetectionDocument25 pagesMicro Cantilever Bio DetectionsriPas encore d'évaluation
- Image Stitching Using MatlabDocument5 pagesImage Stitching Using Matlabอภิฌาน กาญจนวาปสถิตย์Pas encore d'évaluation
- Writeup 3D PerceptionDocument21 pagesWriteup 3D Perceptiongoutam guptaPas encore d'évaluation
- Automatic Panoramic Image Stitching Using Invariant FeaturesDocument16 pagesAutomatic Panoramic Image Stitching Using Invariant FeaturesApoorva JoshiPas encore d'évaluation
- Alignment and Object Instance Recognition: Computer Vision Jia-Bin Huang, Virginia TechDocument71 pagesAlignment and Object Instance Recognition: Computer Vision Jia-Bin Huang, Virginia TechDUDEKULA VIDYASAGARPas encore d'évaluation
- RANSAC Vs ICP PDFDocument15 pagesRANSAC Vs ICP PDFSaransh Vora100% (1)
- Proceedings of CIC 2016 Track 1 Final PDDocument136 pagesProceedings of CIC 2016 Track 1 Final PDDevkant SharmaPas encore d'évaluation
- Designing A Pulsed Eddy Current Sensing Set-Up For Cast Iron Thickness AssessmentDocument7 pagesDesigning A Pulsed Eddy Current Sensing Set-Up For Cast Iron Thickness Assessmentpurushottam nimjePas encore d'évaluation
- Image Stitching: Shangliang Jiang Kate HarrisonDocument63 pagesImage Stitching: Shangliang Jiang Kate HarrisonTrung PhanPas encore d'évaluation
- Robotic Harvesting of Asparagus Using Machine Learning - B180129MEDocument28 pagesRobotic Harvesting of Asparagus Using Machine Learning - B180129METejo NathPas encore d'évaluation
- Computer Vision: Homework 5 3D ReconstructionDocument6 pagesComputer Vision: Homework 5 3D ReconstructionNorah M KiggunduPas encore d'évaluation
- Real-Time 3D Computer Vision Shape Analysis of Cuttings and CavingsDocument16 pagesReal-Time 3D Computer Vision Shape Analysis of Cuttings and CavingsFabian Andrey DiazPas encore d'évaluation
- PNP DLT RansacDocument9 pagesPNP DLT RansacWhatSoAverPas encore d'évaluation
- Robust Navigation of UAV's by Fusion of Vision, InS and GPSDocument38 pagesRobust Navigation of UAV's by Fusion of Vision, InS and GPSNavya Krishna RamuniPas encore d'évaluation
- Image Forgery Detection: A Survey of Recent Deep-Learning ApproachesDocument46 pagesImage Forgery Detection: A Survey of Recent Deep-Learning Approachesaya zuhdPas encore d'évaluation
- Visual Odometry: Part II - Matching, Robustness, and ApplicationsDocument12 pagesVisual Odometry: Part II - Matching, Robustness, and ApplicationsHein HtetPas encore d'évaluation
- 3D Computer Vision Assignment 4Document13 pages3D Computer Vision Assignment 4darvenlosshartPas encore d'évaluation
- Octree-Based Region Growing For Point Cloud SegmentationDocument38 pagesOctree-Based Region Growing For Point Cloud SegmentationJENNY HUANCA ANQUISEPas encore d'évaluation
- PCL TutorialDocument38 pagesPCL TutorialAjay ZapadiyaPas encore d'évaluation
- Cengage Book ListDocument54 pagesCengage Book ListVijayalakshmi Suresh100% (1)
- Laboratory 5. Feature Detection and Content Descriptors For Matching ApplicationsDocument11 pagesLaboratory 5. Feature Detection and Content Descriptors For Matching ApplicationsIulian NeagaPas encore d'évaluation
- 20906-Texto Del Artículo-92707-1-10-20221019Document21 pages20906-Texto Del Artículo-92707-1-10-20221019Francisco DiasPas encore d'évaluation
- Lane Detection Techniques: A Review: Gurveen Kaur Dinesh KumarDocument5 pagesLane Detection Techniques: A Review: Gurveen Kaur Dinesh KumarnemePas encore d'évaluation
- Homography (Computer Vision)Document3 pagesHomography (Computer Vision)Kostas VlahosPas encore d'évaluation
- Lane Detection of Curving Road For Structural High-Way With Straight-Curve Model On VisionDocument10 pagesLane Detection of Curving Road For Structural High-Way With Straight-Curve Model On Visionkrishna reddyPas encore d'évaluation
- 3D Is Here: Point Cloud Library (PCL)Document4 pages3D Is Here: Point Cloud Library (PCL)Renu TyagiPas encore d'évaluation
- 10 30897-Ijegeo 300724-287071Document8 pages10 30897-Ijegeo 300724-287071Albert KuriaPas encore d'évaluation
- A Study On The Geometric Correction Using Satellite ImagesDocument8 pagesA Study On The Geometric Correction Using Satellite ImagesridhuanPas encore d'évaluation
- Research PaperDocument7 pagesResearch Papervaibhav.asthanaPas encore d'évaluation
- GLCM FeaturesDocument494 pagesGLCM FeaturessubhartiPas encore d'évaluation
- The International Journal of Advanced Manufacturing TechnologyDocument8 pagesThe International Journal of Advanced Manufacturing TechnologyonepunchogrePas encore d'évaluation