Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Speed Control PWM CaterpillarDocument7 pagesSpeed Control PWM CaterpillarJavier Moronta100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Laptop Power Sequence Training 100pdf PDFDocument52 pagesLaptop Power Sequence Training 100pdf PDFPc Laptop Care Mukesh67% (3)
- ZLTL-1 Truck ZTC250-ZTC800 Operating ManualDocument75 pagesZLTL-1 Truck ZTC250-ZTC800 Operating ManualSubkhi FauzanPas encore d'évaluation
- Line Following RobotDocument17 pagesLine Following RobotSon TeaPas encore d'évaluation
- Power Analysis of PWM Motor Drives PDFDocument22 pagesPower Analysis of PWM Motor Drives PDFJaime Vanegas IriartePas encore d'évaluation
- Power Inverter 12VDC To 230VAC 3000WDocument19 pagesPower Inverter 12VDC To 230VAC 3000WGhazali Zuberi100% (4)
- NNXX 2 XXX RDocument40 pagesNNXX 2 XXX RPatrice PaulPas encore d'évaluation
- Coolset™-F3: Off-Line Smps Current Mode Controller With Integrated 650V Startup Cell/Coolmos™Document30 pagesCoolset™-F3: Off-Line Smps Current Mode Controller With Integrated 650V Startup Cell/Coolmos™ثائر حربPas encore d'évaluation
- An-CM-302 SPWM Generator For Inverter DesignDocument18 pagesAn-CM-302 SPWM Generator For Inverter DesignRana ThakurPas encore d'évaluation
- Pic Lab BD ManualDocument24 pagesPic Lab BD ManualprabhumadhavPas encore d'évaluation
- Lab Viva SolvedDocument8 pagesLab Viva SolvedMuhammad Umair100% (2)
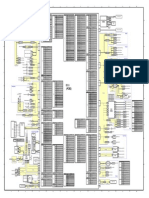
- D117/D118 Point To Point Diagram: Controller BoardDocument9 pagesD117/D118 Point To Point Diagram: Controller BoardLediano PradoPas encore d'évaluation
- Development of Hardware-in-the-Loop (HIL) and Fast Prototyping Tool (FPT) Using OPAL-RTDocument18 pagesDevelopment of Hardware-in-the-Loop (HIL) and Fast Prototyping Tool (FPT) Using OPAL-RTaboofazilPas encore d'évaluation
- ÕëÖ Óô úÔË Ê Ê ¿ØÖÆ ÊõDocument6 pagesÕëÖ Óô úÔË Ê Ê ¿ØÖÆ ÊõArieHanggoroPas encore d'évaluation
- Nano 10 UserManualDocument206 pagesNano 10 UserManualasimnaqvi2003Pas encore d'évaluation
- Advanced LED Temperature Indicator - Electronics Project PDFDocument6 pagesAdvanced LED Temperature Indicator - Electronics Project PDFRomainPas encore d'évaluation
- Power Electronics Lab ManualDocument6 pagesPower Electronics Lab ManualsathyasonyPas encore d'évaluation
- Bluetooth - Based Lamp ControllerDocument59 pagesBluetooth - Based Lamp Controllerbvkarthik2711Pas encore d'évaluation
- 02 Course SyllabusDocument6 pages02 Course SyllabusZulkharnain MuhammadPas encore d'évaluation
- Product Overview: NCV71208: Octal Solenoid Current Controller With N-FET PredriversDocument1 pageProduct Overview: NCV71208: Octal Solenoid Current Controller With N-FET PredriversDimitar PetrovPas encore d'évaluation
- Simple Self-Oscillating Class D Amplifier With Full Output Filter ControlDocument9 pagesSimple Self-Oscillating Class D Amplifier With Full Output Filter ControlEliecerPas encore d'évaluation
- Fuzzy Logic Control For A Speed Control of Induction Motor Using Space Vector Pulse Width ModulationDocument7 pagesFuzzy Logic Control For A Speed Control of Induction Motor Using Space Vector Pulse Width ModulationIr Solly Aryza MengPas encore d'évaluation
- AQUA Drive FC 202: Programming GuideDocument294 pagesAQUA Drive FC 202: Programming Guiderony sheekPas encore d'évaluation
- Pam 199 P enDocument48 pagesPam 199 P enomar alamoriPas encore d'évaluation
- Ee693 PWM Converters and ApplicationsDocument6 pagesEe693 PWM Converters and ApplicationsDilipPas encore d'évaluation
- DC Motor Speed Control Part I: Open-Loop CommandDocument5 pagesDC Motor Speed Control Part I: Open-Loop CommandEbd RahmanPas encore d'évaluation
- DatasheetDocument20 pagesDatasheetcucamucaPas encore d'évaluation
- Ups European Guide - CemepDocument36 pagesUps European Guide - CemepMarcosPas encore d'évaluation
- Compact Analytical Solutions For Determining The Spectral Characteristics of Multicarrier-Based Multilevel PWMDocument9 pagesCompact Analytical Solutions For Determining The Spectral Characteristics of Multicarrier-Based Multilevel PWMKarthikMannemPas encore d'évaluation