Vous aimerez peut-être aussi
- Invoice - 119Document1 pageInvoice - 119Arijit AcharyaPas encore d'évaluation
- Astrolabe Free Chart From HTTP - AlabeDocument2 pagesAstrolabe Free Chart From HTTP - AlabeArijit AcharyaPas encore d'évaluation
- BabaDocument1 pageBabaArijit AcharyaPas encore d'évaluation
- Nsec 13Document75 pagesNsec 13Arijit AcharyaPas encore d'évaluation
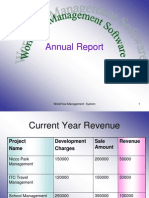
- Annual Report: Workflow Management System 1Document4 pagesAnnual Report: Workflow Management System 1Arijit AcharyaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Us 20030209635 A 1Document11 pagesUs 20030209635 A 1Sergio ArredondoPas encore d'évaluation
- C57 124-1991 PDFDocument32 pagesC57 124-1991 PDFEdwin CapdepomtPas encore d'évaluation
- Guide For RDS-PSDocument9 pagesGuide For RDS-PSyoonghmPas encore d'évaluation
- MARCH 2022 Surplus Record Machinery & Equipment DirectoryDocument720 pagesMARCH 2022 Surplus Record Machinery & Equipment DirectorySurplus RecordPas encore d'évaluation
- Lecture 7 & 8 Load Frequency ControlDocument28 pagesLecture 7 & 8 Load Frequency ControlKundan Dutta100% (1)
- Hydro Power Solutions Alstom 2012Document20 pagesHydro Power Solutions Alstom 2012MarcWorldPas encore d'évaluation
- Tavner PeterDocument303 pagesTavner PeterManigandanPas encore d'évaluation
- Electromagnetism QuestionsDocument20 pagesElectromagnetism QuestionsAbhay BhingradiaPas encore d'évaluation
- US6362718 Meg Tom Bearden 1Document15 pagesUS6362718 Meg Tom Bearden 1Mihai DanielPas encore d'évaluation
- Electrom Winding AnalyzerDocument6 pagesElectrom Winding AnalyzerMin LwinPas encore d'évaluation
- Scanning of Manuals Scanning Project Reference RRPL: Output Filename: Ip0839v01 PDFDocument328 pagesScanning of Manuals Scanning Project Reference RRPL: Output Filename: Ip0839v01 PDFsyamsidiPas encore d'évaluation
- Bodinehandbook All ChaptersDocument264 pagesBodinehandbook All Chaptersabs0001Pas encore d'évaluation
- Renr7941-00 Caterpillar Digital Voltage Regulator ManualDocument56 pagesRenr7941-00 Caterpillar Digital Voltage Regulator ManualGeorge Jhonson100% (2)
- Parallel Operation of AC GeneratorsDocument4 pagesParallel Operation of AC Generatorsgsantosh06Pas encore d'évaluation
- The Suitability of The IEC 61400-2 Wind Model ForDocument8 pagesThe Suitability of The IEC 61400-2 Wind Model ForWanna MsAbstractPas encore d'évaluation
- Brochure Off Grid, Back Up and Island Systems - EN - Web PDFDocument84 pagesBrochure Off Grid, Back Up and Island Systems - EN - Web PDFfaspPas encore d'évaluation
- My TestDocument10 pagesMy TestLakshmi GanapathyPas encore d'évaluation
- Mepl-Design and Engg StatusDocument170 pagesMepl-Design and Engg StatusMathivanan AnbazhaganPas encore d'évaluation
- ATS Training Outline: What Is A Transfer Switch? What Makes A Transfer Switch Reliable?Document48 pagesATS Training Outline: What Is A Transfer Switch? What Makes A Transfer Switch Reliable?mentongPas encore d'évaluation
- Sheet (8) Synchronous Machine Problem (1) :: SolutionDocument5 pagesSheet (8) Synchronous Machine Problem (1) :: Solutionمكاريوس عيادPas encore d'évaluation
- Bee Project Detials Sem I (2020-21)Document1 pageBee Project Detials Sem I (2020-21)Sb creationPas encore d'évaluation
- Instruction Manual: FOR Underfrequency/Overvoltage Module Models: UFOV 250A & UFOV 260ADocument22 pagesInstruction Manual: FOR Underfrequency/Overvoltage Module Models: UFOV 250A & UFOV 260ATurnerPas encore d'évaluation
- Apd NG150Document5 pagesApd NG150Magaly PeraltaPas encore d'évaluation
- Peralatan TBSM 1Document12 pagesPeralatan TBSM 1Adiy Jawil WusthoPas encore d'évaluation
- Electrical Power Generation in Aircraft: Review, Challenges, and OpportunitiesDocument15 pagesElectrical Power Generation in Aircraft: Review, Challenges, and Opportunitiesvogid38712Pas encore d'évaluation
- DC Machines - Section - 2018Document73 pagesDC Machines - Section - 2018Abdulrahman JaliliPas encore d'évaluation
- Aggreko - 100kW User Manual PDFDocument103 pagesAggreko - 100kW User Manual PDFrosemberg_trujillo100% (1)
- Small Signal Stability Analysis of Multi Machine Power Systems Interfaced With Micro Grid IJERTV3IS080275Document8 pagesSmall Signal Stability Analysis of Multi Machine Power Systems Interfaced With Micro Grid IJERTV3IS080275Emílio CamargoPas encore d'évaluation
- Excitation System - MarunII-Thyricon Operation Manual FullDocument61 pagesExcitation System - MarunII-Thyricon Operation Manual FullGanesh Kumar ArumugamPas encore d'évaluation
- Teslaaaaaaaaaaaaaaaaaaaaaaaa PDFDocument3 pagesTeslaaaaaaaaaaaaaaaaaaaaaaaa PDFKESH MusicPas encore d'évaluation