Vous aimerez peut-être aussi
- Thermodynamics of A Rotating Detonation EngineDocument217 pagesThermodynamics of A Rotating Detonation EngineBenmoussa AliPas encore d'évaluation
- Immortals Handbook Epic Bestiary volume two pdfDocument2 pagesImmortals Handbook Epic Bestiary volume two pdfisber7abdoPas encore d'évaluation
- Module 10 Practice PaperDocument25 pagesModule 10 Practice PaperAbdulla Khan67% (3)
- Commercial Communications SatellitesDocument1 pageCommercial Communications SatellitesCarlos Alvarez100% (1)
- Atomic Robo Character SheetDocument1 pageAtomic Robo Character SheetQunariPas encore d'évaluation
- Timeline - Argonopedia, The X Series WikiDocument1 pageTimeline - Argonopedia, The X Series Wikiwarlock36Pas encore d'évaluation
- Spacecraft Description Boilerplate 13Document144 pagesSpacecraft Description Boilerplate 13jackie_fisher_email8329100% (1)
- NASA's Contributions To Aeronautics - Volume 1 (Gnv64)Document973 pagesNASA's Contributions To Aeronautics - Volume 1 (Gnv64)ulys1922Pas encore d'évaluation
- Klingon Character CreationDocument28 pagesKlingon Character Creationmiles1739100% (1)
- Summary of Some Useful Equations: HYPERS301.x Hypersonics From Shock Waves To ScramjetsDocument28 pagesSummary of Some Useful Equations: HYPERS301.x Hypersonics From Shock Waves To ScramjetsShivam AgarwalPas encore d'évaluation
- Guidance Equations For LaunchDocument40 pagesGuidance Equations For Launchedkyle99Pas encore d'évaluation
- 200,000 Year Old Statue Found On Moon - ThecritDocument8 pages200,000 Year Old Statue Found On Moon - ThecritTanya Michaela KneidingerPas encore d'évaluation
- Star Trek Ascendancy Unofficial Complete Rulebook 3-0Document68 pagesStar Trek Ascendancy Unofficial Complete Rulebook 3-0Ross WhitehornPas encore d'évaluation
- SpaceX Voluntary FurDocument49 pagesSpaceX Voluntary Furmichaelkan1Pas encore d'évaluation
- Parametric AerospikeDocument13 pagesParametric AerospikeAjay NathePas encore d'évaluation
- Traversable Achronal Retrograde Domains in Spacetime: Btippett@mail - Ubc.ca Dtsang@physics - Mcgill.caDocument8 pagesTraversable Achronal Retrograde Domains in Spacetime: Btippett@mail - Ubc.ca Dtsang@physics - Mcgill.caAkshay DiwakarPas encore d'évaluation
- PURSUIT Newsletter No. 20, October 1972 - Ivan T. SandersonDocument32 pagesPURSUIT Newsletter No. 20, October 1972 - Ivan T. SandersonuforteanPas encore d'évaluation
- Dynamics and Kinematics Analysis and Simulation of Lower Extremity Power-Assisted ExoskeletonDocument12 pagesDynamics and Kinematics Analysis and Simulation of Lower Extremity Power-Assisted ExoskeletonCesar Augusto Arriaga Arriaga100% (1)
- Satellite NavigationDocument30 pagesSatellite Navigationzakiannuar100% (1)
- ENG-2013-UMN002-R002 Xeva User Manual PDFDocument103 pagesENG-2013-UMN002-R002 Xeva User Manual PDFvalpoloPas encore d'évaluation
- One Prod FalconDocument6 pagesOne Prod FalconSyed Huzaifa Ahmed (Larf Nalavale)Pas encore d'évaluation
- Higher Engineering Mathematics Scilab CodesDocument188 pagesHigher Engineering Mathematics Scilab CodesRahul Gupta100% (1)
- ('Christos Papadimitriou', 'Midterm 2', ' (Solution) ') Fall 2010 PDFDocument5 pages('Christos Papadimitriou', 'Midterm 2', ' (Solution) ') Fall 2010 PDFJohn SmithPas encore d'évaluation
- x3 Reunion XTM Ship Stats 073 v2Document25 pagesx3 Reunion XTM Ship Stats 073 v2ferenc5schvanbergerPas encore d'évaluation
- Star Trek RPG Analysis FASA (1983) Last Unicorn (1999) DECIPHER (2002) MOPHIDIUS (2017) Rule SystemDocument1 pageStar Trek RPG Analysis FASA (1983) Last Unicorn (1999) DECIPHER (2002) MOPHIDIUS (2017) Rule SystemedemaitrePas encore d'évaluation
- Monsters: Demons II Monsters: Demons II: 419 PointsDocument39 pagesMonsters: Demons II Monsters: Demons II: 419 Pointstvb1973Pas encore d'évaluation
- A) True: Chap1 Question 1 (1 Point)Document78 pagesA) True: Chap1 Question 1 (1 Point)Sung-il LeePas encore d'évaluation
- Bfme2 Map TipsDocument4 pagesBfme2 Map Tipsdarklord20Pas encore d'évaluation
- Pyramid - Adventurous Occupations - Computer Expert (For Gurps 4e)Document5 pagesPyramid - Adventurous Occupations - Computer Expert (For Gurps 4e)answeringthecalPas encore d'évaluation
- Vulcan Survey Ship Propulsion DataDocument4 pagesVulcan Survey Ship Propulsion DataTess MercerPas encore d'évaluation
- Slide 20-30Document174 pagesSlide 20-30Gaurav MasandPas encore d'évaluation
- APC ChameleonDocument4 pagesAPC ChameleonSolomaniRulerPas encore d'évaluation
- Counting Probability of Dice Tossing One Two and Three in MatlabDocument4 pagesCounting Probability of Dice Tossing One Two and Three in MatlabJans HendryPas encore d'évaluation
- HeroClix Army SheetDocument1 pageHeroClix Army Sheetchacha23Pas encore d'évaluation
- 2.1.3 Free Body DiagramsDocument2 pages2.1.3 Free Body DiagramsLuka VulinPas encore d'évaluation
- NRL Plasma FormularyDocument73 pagesNRL Plasma FormularyAditya ShrivastavaPas encore d'évaluation
- Setting Update AlphaDocument36 pagesSetting Update AlphaHelyPas encore d'évaluation
- Mass Effect - TimelineDocument2 pagesMass Effect - TimelineIvan Tomašević100% (1)
- 10-Lecture 41, 42 Pole PlacementDocument18 pages10-Lecture 41, 42 Pole PlacementHamza KhanPas encore d'évaluation
- Supply in TOAWDocument3 pagesSupply in TOAWJudykatorPas encore d'évaluation
- AtomicJ Users Manual PDFDocument124 pagesAtomicJ Users Manual PDFAlexandre PereiraPas encore d'évaluation
- Unisystem MM W ButtonsDocument42 pagesUnisystem MM W ButtonsSteve W.100% (1)
- SpaceshipsWorksheet PDFDocument1 pageSpaceshipsWorksheet PDFLeonCaldeiraPas encore d'évaluation
- Orbital Estimation Using Kalman and Least Squares Techniques for Small SatellitesDocument12 pagesOrbital Estimation Using Kalman and Least Squares Techniques for Small SatellitesRathod ShankarPas encore d'évaluation
- A Comparative Study On 6-DOF Trajectory Simulation of A Short Range Rocket Using Aerodynamic Coefficients From Experiments and Missile DATCOMDocument10 pagesA Comparative Study On 6-DOF Trajectory Simulation of A Short Range Rocket Using Aerodynamic Coefficients From Experiments and Missile DATCOMddeshkar8659Pas encore d'évaluation
- State-of-the-art survey of integrated attitude and orbit determinationDocument18 pagesState-of-the-art survey of integrated attitude and orbit determinationHilmi SanusiPas encore d'évaluation
- Aiaa 2009 4887Document12 pagesAiaa 2009 4887amin_127Pas encore d'évaluation
- (Preprint) Iaa-Aas-Dycoss1-11-05: Mauro Pontani and Paolo TeofilattoDocument19 pages(Preprint) Iaa-Aas-Dycoss1-11-05: Mauro Pontani and Paolo TeofilattoKartik ShankarPas encore d'évaluation
- G3LUH - PLAN-13 Satellite Position CalculationDocument11 pagesG3LUH - PLAN-13 Satellite Position CalculationScott HatherPas encore d'évaluation
- Stabilization of Inverted Pendulum On Cart Based On Pole Placement and LQRDocument5 pagesStabilization of Inverted Pendulum On Cart Based On Pole Placement and LQRCitra AlfaPas encore d'évaluation
- Design of Asymptotic Second-Order Sliding Mode Control For Satellite Formation FlyingDocument14 pagesDesign of Asymptotic Second-Order Sliding Mode Control For Satellite Formation FlyingAfshinPas encore d'évaluation
- Tuning of Extended Kalman Filter For Speed Estimation of PMSM Drive Using Particle Swarm OptimizationDocument8 pagesTuning of Extended Kalman Filter For Speed Estimation of PMSM Drive Using Particle Swarm OptimizationInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Walker-Delta Satellite Constellation For PDFDocument39 pagesWalker-Delta Satellite Constellation For PDFJoan Cebrian GalanPas encore d'évaluation
- 56 421Document10 pages56 421nguyendattdhPas encore d'évaluation
- Kalman Filter and Surveying ApplicationsDocument30 pagesKalman Filter and Surveying ApplicationskateborghiPas encore d'évaluation
- 2006249454Document20 pages2006249454sh_nk2010Pas encore d'évaluation
- Optimal Mars Trajectories via Combined Chemical/Electrical PropulsionDocument13 pagesOptimal Mars Trajectories via Combined Chemical/Electrical Propulsionsandra milena bastos molinaPas encore d'évaluation
- Satellite Attitude Control ThesisDocument7 pagesSatellite Attitude Control Thesisafkolhpbr100% (1)
- Constrained Predictive Control of a Servo-Driven Tracking TurretDocument6 pagesConstrained Predictive Control of a Servo-Driven Tracking TurretVu Duc TruongPas encore d'évaluation
- SHIP Rudder Roll StabilizationDocument8 pagesSHIP Rudder Roll StabilizationFrancesco CauzPas encore d'évaluation
- A Numerical Exploration of Parameter Dependence in Power Optimal Flapping FlightDocument31 pagesA Numerical Exploration of Parameter Dependence in Power Optimal Flapping FlightxebitPas encore d'évaluation
- ASimple Estimation Procedure For Roll Rate DerivativesDocument4 pagesASimple Estimation Procedure For Roll Rate DerivativesyararaPas encore d'évaluation
- Magnetic Torquer Attitude Control Via Asymptotic Periodic LQRDocument13 pagesMagnetic Torquer Attitude Control Via Asymptotic Periodic LQRKanu GovilaPas encore d'évaluation
- Unified Development of Lateral Directional Departure CriteriaDocument5 pagesUnified Development of Lateral Directional Departure CriteriaVirginTebowPas encore d'évaluation
- Generalized MMF Space Harmonics and Performance Analysis of Combined Multiple-Step, Star-Delta, Three-Phase Windings Applied On Induction MotorDocument5 pagesGeneralized MMF Space Harmonics and Performance Analysis of Combined Multiple-Step, Star-Delta, Three-Phase Windings Applied On Induction MotorJunaid AhmadPas encore d'évaluation
- Coopertitchener Trifilar1Document30 pagesCoopertitchener Trifilar1api-24490620450% (2)
- Aerospace: Semi-Empirical Prediction of Airfoil HysteresisDocument8 pagesAerospace: Semi-Empirical Prediction of Airfoil HysteresisdimasPas encore d'évaluation
- Ici DistributionDocument13 pagesIci DistributionGonzalo Rafael Landaeta CorderoPas encore d'évaluation
- Rensel K An Attitude Detumbling System For The CubeSTAR Nano Satellite PDFDocument181 pagesRensel K An Attitude Detumbling System For The CubeSTAR Nano Satellite PDFGonzalo Rafael Landaeta CorderoPas encore d'évaluation
- Fredrik Optimal Control 2011 ProsjektDocument45 pagesFredrik Optimal Control 2011 ProsjektGonzalo Rafael Landaeta CorderoPas encore d'évaluation
- CR ReqDocument0 pageCR Reqmaddyhemu11Pas encore d'évaluation
- A Two-Dimensional Numerical Simulation of Plasma Wake StructureDocument48 pagesA Two-Dimensional Numerical Simulation of Plasma Wake StructureGonzalo Rafael Landaeta CorderoPas encore d'évaluation
- ChandrayaanDocument9 pagesChandrayaanhindujudaicPas encore d'évaluation
- TOEFL Preparation Document AnalysisDocument7 pagesTOEFL Preparation Document AnalysisEmilia AnnisaPas encore d'évaluation
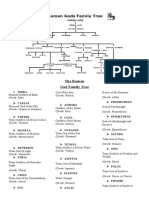
- The Roman God Family Tree: Terra Primeval Goddess of Earth (Greek: Gaia)Document2 pagesThe Roman God Family Tree: Terra Primeval Goddess of Earth (Greek: Gaia)marimar de jesusPas encore d'évaluation
- Ahmed Khattabi Tok ExhibitionDocument4 pagesAhmed Khattabi Tok Exhibitionapi-543376640Pas encore d'évaluation
- Glubke-RussoDocument30 pagesGlubke-RussokannarockPas encore d'évaluation
- Reading ComprehensionDocument8 pagesReading ComprehensionSaravana SelvakumarPas encore d'évaluation
- Giriraj Himachal NewspaperDocument12 pagesGiriraj Himachal NewspaperSahil vermaPas encore d'évaluation
- The Earth in The Solar SystemDocument13 pagesThe Earth in The Solar SystemAyush BansalPas encore d'évaluation
- American: Bonanza Society Mid-Continent Airport Wichita, KS 67277Document22 pagesAmerican: Bonanza Society Mid-Continent Airport Wichita, KS 67277cthembreePas encore d'évaluation
- Atlas Ballistic MissileDocument3 pagesAtlas Ballistic MissileTimia TalashekPas encore d'évaluation
- Elements of Aeronautics NEWDocument2 pagesElements of Aeronautics NEWHareesha N G50% (2)
- Commercial Aircraft Propulsion and Energy Systems Research - Reducing Global Carbon Emissions PDFDocument123 pagesCommercial Aircraft Propulsion and Energy Systems Research - Reducing Global Carbon Emissions PDFTutu TuPas encore d'évaluation
- Complete Each Question With A New Word Equivalent To The Synonym(s) ProvidedDocument22 pagesComplete Each Question With A New Word Equivalent To The Synonym(s) ProvidedBùi Thị Thanh TrúcPas encore d'évaluation
- NASA Langley Research Center's Contributions To The Apollo ProgramDocument10 pagesNASA Langley Research Center's Contributions To The Apollo ProgramBob AndrepontPas encore d'évaluation
- The 8 Planets of Our Solar SystemDocument8 pagesThe 8 Planets of Our Solar SystemHai LinPas encore d'évaluation
- Sop Standard Operating ProceduresDocument3 pagesSop Standard Operating ProceduresTaha SaadanPas encore d'évaluation
- Lspacemca Team4 PDRDocument75 pagesLspacemca Team4 PDRapi-582185109Pas encore d'évaluation
- Immortality 2045 Project: Russian ExperienceDocument14 pagesImmortality 2045 Project: Russian Experiencepatronschik100% (1)
- CH 8Document72 pagesCH 8Charles ChungPas encore d'évaluation
- Acta Astronautica: Anne W. JohnsonDocument7 pagesActa Astronautica: Anne W. Johnsontotenkopf0424Pas encore d'évaluation
- DC 10 PDFDocument7 pagesDC 10 PDFraja89Pas encore d'évaluation