Vous aimerez peut-être aussi
- History of GearsDocument12 pagesHistory of GearsmorolosusPas encore d'évaluation
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsD'EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsPas encore d'évaluation
- Spur Gear Design1Document24 pagesSpur Gear Design1simalaraviPas encore d'évaluation
- Gear Chikuku 1Document37 pagesGear Chikuku 1Kelvin Kindice MapurisaPas encore d'évaluation
- Introduction To GearsDocument30 pagesIntroduction To GearsPrakash Joshi100% (5)
- Chapter 2-Gear SystemDocument26 pagesChapter 2-Gear SystemNui Yuhu KuwPas encore d'évaluation
- Tutorial 3 Josephine Bakewa IDDocument10 pagesTutorial 3 Josephine Bakewa IDJosephine BakewaPas encore d'évaluation
- Lab 1Document8 pagesLab 1Mansoob BukhariPas encore d'évaluation
- Assignment of GearDocument4 pagesAssignment of GearAhsan Shakeel100% (1)
- Gyroscopic Effect (Theory of Machines E-Note 10122015 030631AM)Document18 pagesGyroscopic Effect (Theory of Machines E-Note 10122015 030631AM)Vasudev GuptaPas encore d'évaluation
- 881 Final T2Document22 pages881 Final T2Ankit BurnwalPas encore d'évaluation
- Power Transmitting ElementsDocument20 pagesPower Transmitting ElementsAsma Khan100% (1)
- Gear& Gear Trains PDFDocument55 pagesGear& Gear Trains PDFSumit SumanPas encore d'évaluation
- Internal GearsDocument9 pagesInternal GearsGoutam AcharjeePas encore d'évaluation
- Thesis ReportDocument72 pagesThesis ReportMayur ShetPas encore d'évaluation
- Bda20303 Chapter 1-Gear SystemDocument27 pagesBda20303 Chapter 1-Gear SystemWan SamiraPas encore d'évaluation
- Different Types of Gears: Mr. Krunal M. More Mr. Glen J. Dixon Mr. Sujal K. Ingale Mr. Atharva TamoreDocument11 pagesDifferent Types of Gears: Mr. Krunal M. More Mr. Glen J. Dixon Mr. Sujal K. Ingale Mr. Atharva Tamorerajeshrimore67Pas encore d'évaluation
- Study of Power Transmission DevicesDocument11 pagesStudy of Power Transmission Devices01parthPas encore d'évaluation
- Gear MechanismsDocument4 pagesGear MechanismsNaftali OmuhandePas encore d'évaluation
- Type of Gears Trains and The Methods To Find Train ValueDocument14 pagesType of Gears Trains and The Methods To Find Train Valueabbas bilalPas encore d'évaluation
- GearDocument6 pagesGearshubhradiproy2003Pas encore d'évaluation
- Bevel Gear PraveenDocument23 pagesBevel Gear Praveen18WJ1A03F4 Shashank reddyPas encore d'évaluation
- IEEEReport C3 G5 61 63 67 69 71Document4 pagesIEEEReport C3 G5 61 63 67 69 71Savio MoviesPas encore d'évaluation
- GearsDocument21 pagesGearsabduallah rabahPas encore d'évaluation
- GEARSDocument39 pagesGEARSGrezy MagnoPas encore d'évaluation
- Term Paper As in 2 YearDocument25 pagesTerm Paper As in 2 YearRoopak GoyalPas encore d'évaluation
- Advantages and Disadvantages of GearsDocument3 pagesAdvantages and Disadvantages of GearsRonald Patricio Vaca GuadalupePas encore d'évaluation
- GearsDocument58 pagesGearsapi-238832008100% (3)
- Design of Transmission System Unit IIIDocument57 pagesDesign of Transmission System Unit IIIRaj MohanPas encore d'évaluation
- ModelingDocument5 pagesModelingHa Hamza Al-rubasiPas encore d'évaluation
- CH 08Document77 pagesCH 08abdallah ghannamPas encore d'évaluation
- DISCRIPTIONDocument8 pagesDISCRIPTIONRanu GamesPas encore d'évaluation
- Kassahun Tadess GeerboxDocument16 pagesKassahun Tadess Geerboxabubekery61Pas encore d'évaluation
- Ijirt154739 Paper PDFDocument4 pagesIjirt154739 Paper PDFAnuka VarshaPas encore d'évaluation
- Gear Drive, Belt and Chain Drive - Lecture NotesDocument26 pagesGear Drive, Belt and Chain Drive - Lecture NotesVarun KavvampalliPas encore d'évaluation
- Bme - Part 2Document44 pagesBme - Part 2Sumanth ChallaPas encore d'évaluation
- Gearbox 210509074427Document59 pagesGearbox 210509074427mussietilahungessessePas encore d'évaluation
- CPM 0250 Water Pumping System Using River Force DevDocument9 pagesCPM 0250 Water Pumping System Using River Force DevmanjunathPas encore d'évaluation
- Chapter 1-Gear SystemDocument28 pagesChapter 1-Gear Systemazim100% (1)
- 04 Power TransmissionDocument16 pages04 Power TransmissionVasudev Gupta100% (1)
- GearDocument30 pagesGearsai babuPas encore d'évaluation
- Chain Drive: Guided By:-Prof. P.D. Wadile Presented By: - Hemraj C. Thakare Roll No: - 52Document17 pagesChain Drive: Guided By:-Prof. P.D. Wadile Presented By: - Hemraj C. Thakare Roll No: - 52Hemraj Thakare100% (1)
- External GearsDocument6 pagesExternal GearsGoutam AcharjeePas encore d'évaluation
- Gear Can Be DefinedDocument31 pagesGear Can Be Definedasisha mostPas encore d'évaluation
- Transmission 1 Transmission 1: Group 3Document30 pagesTransmission 1 Transmission 1: Group 3Edwin Anugrah EffendyPas encore d'évaluation
- Basics of Automobile 2Document51 pagesBasics of Automobile 2Amit SinghPas encore d'évaluation
- Unit - 1 HTDocument57 pagesUnit - 1 HTSoham PendsePas encore d'évaluation
- CHP 3 Power Transmission GEARSDocument18 pagesCHP 3 Power Transmission GEARSabinmwangiPas encore d'évaluation
- Case Study DesignDocument12 pagesCase Study DesignAmir Fikri Amran33% (3)
- 1.introduction To Carriage Workshop LallagudaDocument28 pages1.introduction To Carriage Workshop Lallagudavenkatesh naniPas encore d'évaluation
- Gears HandoutDocument28 pagesGears Handoutapi-3827852100% (3)
- Gear EnggDocument109 pagesGear EnggPratyansh AcharyaPas encore d'évaluation
- Dme Ii Oral QuestionDocument8 pagesDme Ii Oral QuestionSanket ThoratPas encore d'évaluation
- TOM CH 4 Gears FundamentalsDocument57 pagesTOM CH 4 Gears FundamentalsEmbolode, Christian JunePas encore d'évaluation
- Gearless Power Transmission For Skew Shafts (A SRRS Mechanism)Document12 pagesGearless Power Transmission For Skew Shafts (A SRRS Mechanism)चन्दनप्रसादPas encore d'évaluation
- Gearless Power Transmission For Skew Shafts (A SRRS Mechanism)Document12 pagesGearless Power Transmission For Skew Shafts (A SRRS Mechanism)Prasanna PurohitPas encore d'évaluation
- Document 2 TDe9 12082018Document8 pagesDocument 2 TDe9 12082018RoshanPas encore d'évaluation
- Spur Gears Pro Vs ConsDocument8 pagesSpur Gears Pro Vs ConsJohannes WallacePas encore d'évaluation
- Unit No. 1 Toothed Gearing: MR - KHARAGE A.B. (Asst. Prof.)Document37 pagesUnit No. 1 Toothed Gearing: MR - KHARAGE A.B. (Asst. Prof.)Viraj BabarPas encore d'évaluation
- Worm Design FormulaDocument1 pageWorm Design FormulaViswatej ChoudaryPas encore d'évaluation
- Project Plan For Implementation of The Quality Management SystemDocument6 pagesProject Plan For Implementation of The Quality Management SystemTomas MoralesPas encore d'évaluation
- F CUSS 1 List of Interested Parties Rev 0 5.1.17 PDFDocument1 pageF CUSS 1 List of Interested Parties Rev 0 5.1.17 PDFViswatej ChoudaryPas encore d'évaluation
- Worm DesignDocument10 pagesWorm DesignViswatej ChoudaryPas encore d'évaluation
- New Auditor GuidelinesDocument19 pagesNew Auditor GuidelinesViswatej ChoudaryPas encore d'évaluation
- NCR Life CysleDocument9 pagesNCR Life CysleViswatej ChoudaryPas encore d'évaluation
- Iso 8734Document32 pagesIso 8734Viswatej ChoudaryPas encore d'évaluation
- NCR Life CysleDocument9 pagesNCR Life CysleViswatej ChoudaryPas encore d'évaluation
- Iso 8734Document32 pagesIso 8734Viswatej ChoudaryPas encore d'évaluation
- BSI Corrective and Preventive Actions Whitepaper en GB UKDocument13 pagesBSI Corrective and Preventive Actions Whitepaper en GB UKjoshi0Pas encore d'évaluation
- 6 Methods of Verifying CAPADocument3 pages6 Methods of Verifying CAPAMariver LlorentePas encore d'évaluation
- APG TopManagement2015 PDFDocument3 pagesAPG TopManagement2015 PDFViswatej ChoudaryPas encore d'évaluation
- Non-Conformity and Corrective ActionDocument1 pageNon-Conformity and Corrective ActionViswatej ChoudaryPas encore d'évaluation
- Keyway, Key Details: Extract Page 1Document1 pageKeyway, Key Details: Extract Page 1Viswatej ChoudaryPas encore d'évaluation
- What Is SteelDocument4 pagesWhat Is SteelViswatej ChoudaryPas encore d'évaluation
- New Microsoft Word DocumentDocument1 pageNew Microsoft Word DocumentViswatej ChoudaryPas encore d'évaluation
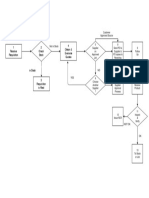
- Purchase Flow ChartDocument1 pagePurchase Flow ChartViswatej ChoudaryPas encore d'évaluation
- Railway ALP CBT 2 SyllabusDocument4 pagesRailway ALP CBT 2 SyllabusViswatej ChoudaryPas encore d'évaluation
- Data MaterialsDocument40 pagesData Materialsjeff_56Pas encore d'évaluation
- Global Quality Manual Iso 9001 2015Document17 pagesGlobal Quality Manual Iso 9001 2015Viswatej ChoudaryPas encore d'évaluation
- Quality ManualDocument22 pagesQuality ManualRajeeb MohammedPas encore d'évaluation
- Polymer FoamsDocument156 pagesPolymer FoamsViswatej Choudary100% (2)
- Concept Selection of Car Bumper Beam With Developed Hybrid Bio-Composite MaterialDocument9 pagesConcept Selection of Car Bumper Beam With Developed Hybrid Bio-Composite MaterialViswatej ChoudaryPas encore d'évaluation
- Ijetae 0614 128Document5 pagesIjetae 0614 128Viswatej ChoudaryPas encore d'évaluation
- Design and Manufacturing of Injection MoldDocument30 pagesDesign and Manufacturing of Injection Moldandresromero80Pas encore d'évaluation
- Creo Interview QADocument2 pagesCreo Interview QAViswatej ChoudaryPas encore d'évaluation
- Gear IntroductionDocument24 pagesGear Introductionankesh_ghoghari100% (2)
- Class: V G.K Work Sheet Marks: 20 M Subject: G.K Time: 40 Min Name: - R.NoDocument2 pagesClass: V G.K Work Sheet Marks: 20 M Subject: G.K Time: 40 Min Name: - R.NoViswatej ChoudaryPas encore d'évaluation
- CIE Physics IGCSE: General Practical SkillsDocument3 pagesCIE Physics IGCSE: General Practical SkillsSajid Mahmud ChoudhuryPas encore d'évaluation
- International Business EnvironmentDocument5 pagesInternational Business EnvironmentrahulPas encore d'évaluation
- Computer Graphics Mini ProjectDocument25 pagesComputer Graphics Mini ProjectGautam Singh78% (81)
- South West Mining LTD - Combined CFO & HWA - VerDocument8 pagesSouth West Mining LTD - Combined CFO & HWA - Verapi-3809359Pas encore d'évaluation
- LAW 107 - Ganaway vs. Quillen (G.R. No. 18619)Document2 pagesLAW 107 - Ganaway vs. Quillen (G.R. No. 18619)Danielle AbuelPas encore d'évaluation
- Visa Requirements Austrian EmbassyDocument2 pagesVisa Requirements Austrian Embassyadalcayde2514Pas encore d'évaluation
- Median FilteringDocument30 pagesMedian FilteringK.R.RaguramPas encore d'évaluation
- Text That Girl Cheat Sheet NewDocument25 pagesText That Girl Cheat Sheet NewfhgfghgfhPas encore d'évaluation
- Radix Sort - Wikipedia, The Free EncyclopediaDocument13 pagesRadix Sort - Wikipedia, The Free EncyclopediasbaikunjePas encore d'évaluation
- ASTM G165-99 (R2005) Standard Practice For Determining Rail-To-Earth ResistanceDocument5 pagesASTM G165-99 (R2005) Standard Practice For Determining Rail-To-Earth Resistance曾乙申100% (1)
- NGOs in Satkhira PresentationDocument17 pagesNGOs in Satkhira PresentationRubayet KhundokerPas encore d'évaluation
- QT1-EVNPMB2-0-NCR-Z-013 Water Treament System of AccommondationDocument3 pagesQT1-EVNPMB2-0-NCR-Z-013 Water Treament System of AccommondationDoan Ngoc DucPas encore d'évaluation
- Traffic Speed StudyDocument55 pagesTraffic Speed StudyAnika Tabassum SarkarPas encore d'évaluation
- Template For Homework6Document2 pagesTemplate For Homework6Никола СтефановићPas encore d'évaluation
- 032017Document107 pages032017Aditya MakwanaPas encore d'évaluation
- Web Server ProjectDocument16 pagesWeb Server Projectمعتز العجيليPas encore d'évaluation
- Audit Process - Performing Substantive TestDocument49 pagesAudit Process - Performing Substantive TestBooks and Stuffs100% (1)
- Steinway Case - CH 03Document5 pagesSteinway Case - CH 03Twēéty TuiñklePas encore d'évaluation
- Note 2958296 Pre-Implementation Steps: Create Table TypeDocument3 pagesNote 2958296 Pre-Implementation Steps: Create Table Typevishnu900890Pas encore d'évaluation
- 4 FAR EAST BANK & TRUST COMPANY V DIAZ REALTY INCDocument3 pages4 FAR EAST BANK & TRUST COMPANY V DIAZ REALTY INCDaniellePas encore d'évaluation
- E14r50p01 800 MhaDocument4 pagesE14r50p01 800 Mha'Theodora GeorgianaPas encore d'évaluation
- Factors Affecting The Implementation of Green Procurement: Empirical Evidence From Indonesian Educational InstitutionDocument12 pagesFactors Affecting The Implementation of Green Procurement: Empirical Evidence From Indonesian Educational InstitutionYeni Saro ManaluPas encore d'évaluation
- Br2e Int Readingfile10 PDFDocument2 pagesBr2e Int Readingfile10 PDFSanti RodriguezPas encore d'évaluation
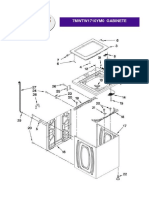
- 7MWTW1710YM0Document8 pages7MWTW1710YM0Izack-Dy JimZitPas encore d'évaluation
- MC 33199Document12 pagesMC 33199Abbode HoraniPas encore d'évaluation
- Guide To Networking Essentials Fifth Edition: Making Networks WorkDocument33 pagesGuide To Networking Essentials Fifth Edition: Making Networks WorkKhamis SeifPas encore d'évaluation
- Hilti AnchorDocument5 pagesHilti AnchorGopi KrishnanPas encore d'évaluation
- Assignment 03 Investments in Debt SecuritiesDocument4 pagesAssignment 03 Investments in Debt SecuritiesJella Mae YcalinaPas encore d'évaluation
- System Requirements For Autodesk Revit 2018 ProductsDocument8 pagesSystem Requirements For Autodesk Revit 2018 ProductsDaryobmsPas encore d'évaluation
- Germany's Three-Pillar Banking SystemDocument7 pagesGermany's Three-Pillar Banking Systemmladen_nbPas encore d'évaluation
- The Laws of Thermodynamics: A Very Short IntroductionD'EverandThe Laws of Thermodynamics: A Very Short IntroductionÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Oil and Gas Pipelines: Integrity and Safety HandbookD'EverandOil and Gas Pipelines: Integrity and Safety HandbookPas encore d'évaluation
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseD'EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseÉvaluation : 4.5 sur 5 étoiles4.5/5 (51)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsD'EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsPas encore d'évaluation
- Aerodynamics for Engineering StudentsD'EverandAerodynamics for Engineering StudentsÉvaluation : 5 sur 5 étoiles5/5 (5)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedD'EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedÉvaluation : 5 sur 5 étoiles5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CD'EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CPas encore d'évaluation
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsD'EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsPas encore d'évaluation
- Handbook of Mechanical and Materials EngineeringD'EverandHandbook of Mechanical and Materials EngineeringÉvaluation : 5 sur 5 étoiles5/5 (4)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AD'EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&APas encore d'évaluation
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideD'Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideÉvaluation : 3.5 sur 5 étoiles3.5/5 (7)
- Waves and Beaches: The Powerful Dynamics of Sea and CoastD'EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastÉvaluation : 4 sur 5 étoiles4/5 (1)
- The Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsD'EverandThe Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsPas encore d'évaluation
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyD'EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyÉvaluation : 5 sur 5 étoiles5/5 (1)
- Advanced Computer-Aided Fixture DesignD'EverandAdvanced Computer-Aided Fixture DesignÉvaluation : 5 sur 5 étoiles5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionD'EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)D'EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Évaluation : 4 sur 5 étoiles4/5 (12)
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansD'EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansÉvaluation : 4 sur 5 étoiles4/5 (8)
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersD'EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersÉvaluation : 4 sur 5 étoiles4/5 (13)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsD'EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsPas encore d'évaluation