Vous aimerez peut-être aussi
- OPC and DCOM Configuration - Windows Server 2008Document24 pagesOPC and DCOM Configuration - Windows Server 2008jamestppPas encore d'évaluation
- Real Time Optimization With Multivariable Control Is Required To Maximize ProfitsDocument5 pagesReal Time Optimization With Multivariable Control Is Required To Maximize ProfitsjamestppPas encore d'évaluation
- Aspen Manufacturing Suite Advanced Process Control: Release NotesDocument35 pagesAspen Manufacturing Suite Advanced Process Control: Release NotesjamestppPas encore d'évaluation
- Conda Cheatsheet PDFDocument2 pagesConda Cheatsheet PDFDeeptiPas encore d'évaluation
- Simulacao Dinamica e o Engenheiro de ProcessosDocument16 pagesSimulacao Dinamica e o Engenheiro de ProcessosAlancássio EulálioPas encore d'évaluation
- Multi-Variable Predictive Controller For Bauxite MillingDocument4 pagesMulti-Variable Predictive Controller For Bauxite MillingjamestppPas encore d'évaluation
- Handbook of Commercial Catalysts: Heterogeneous Catalysts: by Howard F. Rase Pag 462 and 463Document1 pageHandbook of Commercial Catalysts: Heterogeneous Catalysts: by Howard F. Rase Pag 462 and 463jamestppPas encore d'évaluation
- First Order LinearDocument2 pagesFirst Order LinearjamestppPas encore d'évaluation
- MPC AspenDocument4 pagesMPC AspenjamestppPas encore d'évaluation
- Introduction To ODEDocument1 pageIntroduction To ODEjamestppPas encore d'évaluation
- IsoclinesDocument2 pagesIsoclinesErnani LezierPas encore d'évaluation
- Reduce Gas Entrainment in Pipe FlowDocument3 pagesReduce Gas Entrainment in Pipe FlowjamestppPas encore d'évaluation
- MPC Aspen PDFDocument5 pagesMPC Aspen PDFjamestppPas encore d'évaluation
- Source - DCOM Event ID - 10021 (Windows Operating System 5Document1 pageSource - DCOM Event ID - 10021 (Windows Operating System 5jamestppPas encore d'évaluation
- Aspen InfoPlus.21 Mobile V7.3Document8 pagesAspen InfoPlus.21 Mobile V7.3jamestppPas encore d'évaluation
- Decentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowDocument6 pagesDecentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowjamestppPas encore d'évaluation
- Decentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowDocument6 pagesDecentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowjamestppPas encore d'évaluation
- Exchanger Selection & Design in An LPG Recovery UnitDocument27 pagesExchanger Selection & Design in An LPG Recovery UnitjamestppPas encore d'évaluation
- Decentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowDocument6 pagesDecentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowjamestppPas encore d'évaluation
- AmmoniaDocument17 pagesAmmoniajamestppPas encore d'évaluation
- Orifice Sizing CalculationDocument24 pagesOrifice Sizing Calculationjamestpp67% (3)
- Vapor Phase Pressure Drop MethodsDocument32 pagesVapor Phase Pressure Drop MethodsjamestppPas encore d'évaluation
- Comp Gas Flow FormulaDocument10 pagesComp Gas Flow FormulajamestppPas encore d'évaluation
- Handbook of Commercial Catalysts: Heterogeneous Catalysts: by Howard F. Rase Pag 462 and 463Document1 pageHandbook of Commercial Catalysts: Heterogeneous Catalysts: by Howard F. Rase Pag 462 and 463jamestppPas encore d'évaluation
- Solving Vessel EquationsDocument5 pagesSolving Vessel EquationsjamestppPas encore d'évaluation
- Tecnicas para Cartas de Amor U OdioDocument4 pagesTecnicas para Cartas de Amor U OdioChristian Gabriel Stampacchio100% (16)
- Slurry Line SizingDocument147 pagesSlurry Line Sizingjamestpp0% (1)
- Sizing Air ReceiverDocument3 pagesSizing Air ReceiverAnkon Mukherjee100% (3)
- Control Structure Design For Complete Chemical PlantsDocument16 pagesControl Structure Design For Complete Chemical PlantsjamestppPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Completed UNIT-III 20.9.17Document61 pagesCompleted UNIT-III 20.9.17Dr.A.R.KavithaPas encore d'évaluation
- RepetMat U05 Kartk Slow Podst Rozsz BDocument1 pageRepetMat U05 Kartk Slow Podst Rozsz BAndrzej KrasaPas encore d'évaluation
- Febriani Putri Pratiwi - A021191039 - E-Commerce A - Tugas Individu 8Document15 pagesFebriani Putri Pratiwi - A021191039 - E-Commerce A - Tugas Individu 8iinPas encore d'évaluation
- Did MTV Conspire Against Michael JacksonDocument6 pagesDid MTV Conspire Against Michael JacksonCarlos DMPas encore d'évaluation
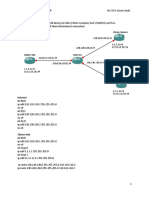
- CCIEv5 DMVPN Labs WorkbookDocument54 pagesCCIEv5 DMVPN Labs WorkbookSyed AliPas encore d'évaluation
- OLATInstallationGuide-7 2Document8 pagesOLATInstallationGuide-7 2krokodyl2Pas encore d'évaluation
- Summative Ideas-2Document3 pagesSummative Ideas-2api-385377344Pas encore d'évaluation
- C# Programming For DummiesDocument69 pagesC# Programming For DummiesLoveday Nnasquare OkoronkwoPas encore d'évaluation
- 5 Troubleshooting & MaintDocument105 pages5 Troubleshooting & MaintDerrick SenyoPas encore d'évaluation
- Animal Crossing - City Folk Hair Style Guide - NintendoWorldsDocument11 pagesAnimal Crossing - City Folk Hair Style Guide - NintendoWorldsmslaterdesignsPas encore d'évaluation
- NCC Group Annual Report For Year Ended 31 May 2015Document154 pagesNCC Group Annual Report For Year Ended 31 May 2015rayimasterPas encore d'évaluation
- Ict 10 LM PDFDocument334 pagesIct 10 LM PDFMay RusellePas encore d'évaluation
- All About Transport RequestDocument6 pagesAll About Transport RequestKrushna SwainPas encore d'évaluation
- RA 9995 - ReferencesDocument13 pagesRA 9995 - ReferenceservingabralagbonPas encore d'évaluation
- Official Resume Christopher NeckermannDocument1 pageOfficial Resume Christopher NeckermannChris NeckermannPas encore d'évaluation
- Gab Hernandez Freelance Resume PDFDocument2 pagesGab Hernandez Freelance Resume PDFGabriel HernandezPas encore d'évaluation
- Carrefour Case StudyDocument2 pagesCarrefour Case Studypooja mallaPas encore d'évaluation
- Manual Testing Interview QuestionsDocument20 pagesManual Testing Interview QuestionsAmit BarikPas encore d'évaluation
- Amtrak Trackside WiFi RFP IntroductionDocument11 pagesAmtrak Trackside WiFi RFP IntroductionEsme VosPas encore d'évaluation
- FC Csp423 PDF TiDocument1 pageFC Csp423 PDF TiEmilyPas encore d'évaluation
- KaleidaGraph Manual Version 3.6Document325 pagesKaleidaGraph Manual Version 3.6aNIGRO131Pas encore d'évaluation
- JSP Session Tracking: CookiesDocument6 pagesJSP Session Tracking: Cookiesvicky kumarPas encore d'évaluation
- Do You Really Get ClassloadersDocument30 pagesDo You Really Get ClassloadersFrancisco Javier Gonzalez MolinaPas encore d'évaluation
- Service Manual Acer Aspire 9920Document115 pagesService Manual Acer Aspire 9920Soporte Tecnico Buenos AiresPas encore d'évaluation
- CP IPS BestPracticesDocument21 pagesCP IPS BestPracticesGabino PampiniPas encore d'évaluation
- The Toilet Paper Entrepreneur - Michalowicz, Mike PDFDocument70 pagesThe Toilet Paper Entrepreneur - Michalowicz, Mike PDFPaul Mwangi Makau100% (5)
- Spec Recorder Samsung HRD-E1630L DVRDocument1 pageSpec Recorder Samsung HRD-E1630L DVRHendro SetiawanPas encore d'évaluation
- V1600D Series Software Release NotesDocument46 pagesV1600D Series Software Release NotesAhmed Mah PamuNgkasPas encore d'évaluation
- Bizhub C35 Ug Printer Copy Scanner en 3 1 0Document388 pagesBizhub C35 Ug Printer Copy Scanner en 3 1 0Daniel FernandesPas encore d'évaluation
- Eventloganalyzer Userguide PDFDocument218 pagesEventloganalyzer Userguide PDFvanessav5Pas encore d'évaluation