Vous aimerez peut-être aussi
- WP Contentuploads201909Bonsai Basic Design 2-12-13.PDF 3Document49 pagesWP Contentuploads201909Bonsai Basic Design 2-12-13.PDF 3Rahul PaulPas encore d'évaluation
- WP Contentuploads201909Bonsai Basic Design 2-12-13.PDF 3Document49 pagesWP Contentuploads201909Bonsai Basic Design 2-12-13.PDF 3Rahul PaulPas encore d'évaluation
- INFOclinical HN Version2 30may2018Document38 pagesINFOclinical HN Version2 30may2018Rahul PaulPas encore d'évaluation
- Imgp Roc 04 Local OpDocument28 pagesImgp Roc 04 Local OpRahul PaulPas encore d'évaluation
- Assignment 0Document8 pagesAssignment 0Rahul PaulPas encore d'évaluation
- WP Contentuploads201909Bonsai Basic Design 2-12-13.PDF 3Document49 pagesWP Contentuploads201909Bonsai Basic Design 2-12-13.PDF 3Rahul PaulPas encore d'évaluation
- Algo AssignmentDocument8 pagesAlgo AssignmentRahul PaulPas encore d'évaluation
- Pixel-Based and Region-Based Image Fusion Schemes Using ICA BasesDocument12 pagesPixel-Based and Region-Based Image Fusion Schemes Using ICA BasesRahul PaulPas encore d'évaluation
- 333 High Frequency GRE Words With MeaningsDocument4 pages333 High Frequency GRE Words With Meaningsvysakhpillai100% (4)
- Object TrackingDocument23 pagesObject TrackingRahul PaulPas encore d'évaluation
- Imgp Roc 03 Point OpDocument30 pagesImgp Roc 03 Point OpRahul PaulPas encore d'évaluation
- SAT / ACT / PSAT Word List - 01Document5 pagesSAT / ACT / PSAT Word List - 01aehsgo2collegePas encore d'évaluation
- Image ReconstructionDocument28 pagesImage ReconstructionRahul PaulPas encore d'évaluation
- Pixel-Based and Region-Based Image Fusion Schemes Using ICA BasesDocument12 pagesPixel-Based and Region-Based Image Fusion Schemes Using ICA BasesRahul PaulPas encore d'évaluation
- Tutorialspss17 110415045353 Phpapp01Document35 pagesTutorialspss17 110415045353 Phpapp01Rahul Paul100% (1)
- GRE Cut-OffDocument2 pagesGRE Cut-OffGautham KannanPas encore d'évaluation
- Tutorial ImageSegmentationGraph Cut4 SharonDocument45 pagesTutorial ImageSegmentationGraph Cut4 SharonRahul PaulPas encore d'évaluation
- Files-5LL70 Mod 01 Instr SZinger Introduction - and - FundamentalsDocument17 pagesFiles-5LL70 Mod 01 Instr SZinger Introduction - and - FundamentalsRahul PaulPas encore d'évaluation
- How To Prepare Competitive ExamsDocument37 pagesHow To Prepare Competitive ExamsNagarajesh NaraparajuPas encore d'évaluation
- Seminar ReportDocument21 pagesSeminar ReportRahul PaulPas encore d'évaluation
- Graph Cuts IntroDocument35 pagesGraph Cuts IntroRahul PaulPas encore d'évaluation
- How To Prepare Competitive ExamsDocument37 pagesHow To Prepare Competitive ExamsNagarajesh NaraparajuPas encore d'évaluation
- ExplainationsDocument9 pagesExplainationsRahul PaulPas encore d'évaluation
- Seminar ReportDocument21 pagesSeminar ReportRahul PaulPas encore d'évaluation
- 2011 IEEE Symposium On Security and Privacy 2011 IEEE Symposium On Security and PrivacyDocument9 pages2011 IEEE Symposium On Security and Privacy 2011 IEEE Symposium On Security and PrivacyRahul PaulPas encore d'évaluation
- Master Theorem: Section 7.3 of RosenDocument13 pagesMaster Theorem: Section 7.3 of RosenmadhuyadavPas encore d'évaluation
- CS2011SQDocument27 pagesCS2011SQSIVA KRISHNA PRASAD ARJAPas encore d'évaluation
- LISHELPDocument1 pageLISHELPRahul PaulPas encore d'évaluation
- Railway Reservation System2Document47 pagesRailway Reservation System2Rahul Paul50% (2)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Monitor AOC 24P3CW EnglishDocument32 pagesMonitor AOC 24P3CW Englishflorinf_uPas encore d'évaluation
- 8 Bevel ProtractorsDocument4 pages8 Bevel Protractorssomu_amuPas encore d'évaluation
- Swat Luu: User ManualDocument13 pagesSwat Luu: User ManualgjferreiraPas encore d'évaluation
- Induction - George Ricarrson 2501987261Document11 pagesInduction - George Ricarrson 2501987261George RYPas encore d'évaluation
- Manual X-C EFC Diversey Namthip - ENDocument37 pagesManual X-C EFC Diversey Namthip - ENthouche007Pas encore d'évaluation
- ATR 72 - Flight ManualDocument490 pagesATR 72 - Flight Manualmuya78100% (1)
- 925E II 24 PG A4 Broch - 12 - 2020 - DCECDocument13 pages925E II 24 PG A4 Broch - 12 - 2020 - DCECekkyagungPas encore d'évaluation
- Sterlization of Water Using Bleaching Powder PDFDocument20 pagesSterlization of Water Using Bleaching Powder PDFradha krishnanPas encore d'évaluation
- Review For Mastery: VocabularyDocument3 pagesReview For Mastery: VocabularyHala EidPas encore d'évaluation
- Airy stress function enables determination of stress components in pure beam bendingDocument19 pagesAiry stress function enables determination of stress components in pure beam bendingmaran.suguPas encore d'évaluation
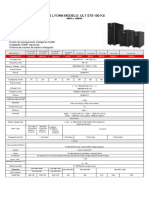
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzPas encore d'évaluation
- Mid-Term Engr 6201 2020Document3 pagesMid-Term Engr 6201 2020Naseri ShaunPas encore d'évaluation
- Data Assigment 1Document32 pagesData Assigment 1Sukhwinder Kaur100% (1)
- PSE YRC1000micro 00Document25 pagesPSE YRC1000micro 00LiemPas encore d'évaluation
- Validation Rules in SAP FIDocument3 pagesValidation Rules in SAP FINethaji GurramPas encore d'évaluation
- HP Application Lifecycle Management Readme: What's New Installation InstructionsDocument36 pagesHP Application Lifecycle Management Readme: What's New Installation InstructionsBrandon GarciaPas encore d'évaluation
- GH Chap 78 - Insulin, Glucagon and DMDocument16 pagesGH Chap 78 - Insulin, Glucagon and DMShellz2428Pas encore d'évaluation
- CG-SR SL Mechanical Drawing Ver1.40Document28 pagesCG-SR SL Mechanical Drawing Ver1.40Jose Cardoso100% (1)
- 0580 w13 QP 41Document20 pages0580 w13 QP 41Haider AliPas encore d'évaluation
- Materials and Techniques Used For The "Vienna Moamin": Multianalytical Investigation of A Book About Hunting With Falcons From The Thirteenth CenturyDocument17 pagesMaterials and Techniques Used For The "Vienna Moamin": Multianalytical Investigation of A Book About Hunting With Falcons From The Thirteenth CenturyAirish FPas encore d'évaluation
- FGS80HAS 100 V 50-60 HZ 1Document3 pagesFGS80HAS 100 V 50-60 HZ 1Tomas GuaiquirePas encore d'évaluation
- MSC Thesis Final Version Stephan de HoopDocument92 pagesMSC Thesis Final Version Stephan de HoopSanjay singhPas encore d'évaluation
- NMNR5104 Research MethodologyDocument2 pagesNMNR5104 Research MethodologynadiaPas encore d'évaluation
- Newtons CowsDocument9 pagesNewtons CowsLawrence Lim Ah KowPas encore d'évaluation
- Canon I Sensys LBP5300 5360Document192 pagesCanon I Sensys LBP5300 5360GonzaloPas encore d'évaluation
- Insight: Mini C-Arm Imaging System Technical Reference ManualDocument21 pagesInsight: Mini C-Arm Imaging System Technical Reference ManualTyrone CoxPas encore d'évaluation
- STI0903 - PSD Postprocessing 2Document7 pagesSTI0903 - PSD Postprocessing 2choprahariPas encore d'évaluation
- Esolutions Manual - Powered by CogneroDocument31 pagesEsolutions Manual - Powered by CogneroAll About MusicPas encore d'évaluation
- Cagayan State University: Republic of The PhilippinesDocument21 pagesCagayan State University: Republic of The PhilippinesblessaPas encore d'évaluation
- Academic Performance of Face-to-Face and Online Students in An Introductory Economics Course and Determinants of Final Course GradesDocument13 pagesAcademic Performance of Face-to-Face and Online Students in An Introductory Economics Course and Determinants of Final Course GradesLou BaldomarPas encore d'évaluation