Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Introduction To Robotics Mechanics and Control 4th Edition Craig Solution ManualDocument6 pagesIntroduction To Robotics Mechanics and Control 4th Edition Craig Solution Manualrichard96% (25)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Lab Report 6 GyroscopeDocument6 pagesLab Report 6 GyroscopeazarmechPas encore d'évaluation
- MT Development and Characterization of Light-Weight Armor MaterialsDocument81 pagesMT Development and Characterization of Light-Weight Armor MaterialsMekaTronPas encore d'évaluation
- MT Acoustic Design Based On Multi-Aspect Performance AnalysisDocument75 pagesMT Acoustic Design Based On Multi-Aspect Performance AnalysisMekaTronPas encore d'évaluation
- United States Patent (10) Patent No.: US 6,755,365 B1: Meredith (45) Date of Patent: Jun. 29, 2004Document17 pagesUnited States Patent (10) Patent No.: US 6,755,365 B1: Meredith (45) Date of Patent: Jun. 29, 2004MekaTronPas encore d'évaluation
- MT Vision-Based Monitoring and Control of Fiber Laser WeldingDocument101 pagesMT Vision-Based Monitoring and Control of Fiber Laser WeldingMekaTronPas encore d'évaluation
- MT Accelerometer Based Handwritten Character Recognition Using Dynamic Time WarpingDocument95 pagesMT Accelerometer Based Handwritten Character Recognition Using Dynamic Time WarpingMekaTronPas encore d'évaluation
- MT Artificial Neural Networks and Fuzzy Logic PDFDocument65 pagesMT Artificial Neural Networks and Fuzzy Logic PDFMekaTronPas encore d'évaluation
- MT Detection of Man-Made Structures in Aerial Imagery Using Quasi-Supervised Learning and Texture FeaturesDocument71 pagesMT Detection of Man-Made Structures in Aerial Imagery Using Quasi-Supervised Learning and Texture FeaturesMekaTronPas encore d'évaluation
- MT Determination of Effective Parameters For Drying of ApplesDocument91 pagesMT Determination of Effective Parameters For Drying of ApplesMekaTronPas encore d'évaluation
- Automatic Identification of Evolutionary and Sequence Relationships in Large Scale Protein Data Using Computational and Graph-Theoretical AnalysesDocument128 pagesAutomatic Identification of Evolutionary and Sequence Relationships in Large Scale Protein Data Using Computational and Graph-Theoretical AnalysesMekaTronPas encore d'évaluation
- MT Artificial Neural Netwoks and Fuzzy Logic Models For Cooling Load PredictionDocument55 pagesMT Artificial Neural Netwoks and Fuzzy Logic Models For Cooling Load PredictionMekaTronPas encore d'évaluation
- MT Autonomous Solid Waste Separation System DesignDocument84 pagesMT Autonomous Solid Waste Separation System DesignMekaTronPas encore d'évaluation
- MMD User's Guide En-UsDocument93 pagesMMD User's Guide En-UsMekaTronPas encore d'évaluation
- MT Desing, Development and Control of A Twin Rotor SystemsDocument65 pagesMT Desing, Development and Control of A Twin Rotor SystemsMekaTronPas encore d'évaluation
- MT Automatic Matching of Aerial Coastline Images With Map Data PDFDocument90 pagesMT Automatic Matching of Aerial Coastline Images With Map Data PDFMekaTronPas encore d'évaluation
- MT Analysis and Re-Design of An Outdoor Fitness Equipment's MechanismDocument54 pagesMT Analysis and Re-Design of An Outdoor Fitness Equipment's MechanismMekaTronPas encore d'évaluation
- MT An Automatic Vision Guided Position Controller in A Conveyor Belt Pick and Place SystemDocument79 pagesMT An Automatic Vision Guided Position Controller in A Conveyor Belt Pick and Place SystemMekaTronPas encore d'évaluation
- 1 s2.0 S2212827115002383 MainDocument6 pages1 s2.0 S2212827115002383 MainMekaTronPas encore d'évaluation
- MT An Automatic Pitch Analysis Method For Turkish Maqam MusicDocument14 pagesMT An Automatic Pitch Analysis Method For Turkish Maqam MusicMekaTronPas encore d'évaluation
- Worldwide Trends in Renewable Hydropower DevelopmentDocument3 pagesWorldwide Trends in Renewable Hydropower DevelopmentMekaTronPas encore d'évaluation
- Finite Element Simulation of Residual Stresses in Cryogenic Machining of AZ31B MG AlloyDocument6 pagesFinite Element Simulation of Residual Stresses in Cryogenic Machining of AZ31B MG AlloyMekaTronPas encore d'évaluation
- Surah PendekDocument10 pagesSurah PendekMekaTronPas encore d'évaluation
- Inspiron 11 3162 Laptop Service Manual en UsDocument89 pagesInspiron 11 3162 Laptop Service Manual en UsZozoaa ZozoPas encore d'évaluation
- 07 ASMELitool Temp in Ti Drilling PDFDocument10 pages07 ASMELitool Temp in Ti Drilling PDFMekaTronPas encore d'évaluation
- Sicest Presentation Schedule 281016 (Share)Document33 pagesSicest Presentation Schedule 281016 (Share)MekaTronPas encore d'évaluation
- CFPDocument2 pagesCFPMekaTronPas encore d'évaluation
- Types of ContactDocument103 pagesTypes of ContactMekaTronPas encore d'évaluation
- SampleDocument3 pagesSampleMekaTronPas encore d'évaluation
- 123 Precision Radial Turning of AISI D2 SteelDocument8 pages123 Precision Radial Turning of AISI D2 SteelMekaTronPas encore d'évaluation
- NonLinSys NSJ MCTDocument19 pagesNonLinSys NSJ MCTshiwapreetheePas encore d'évaluation
- 109 Turning Simulations Using A ThreedimentionalDocument5 pages109 Turning Simulations Using A ThreedimentionalMekaTronPas encore d'évaluation
- Mechanical Analysis of Human MotionDocument3 pagesMechanical Analysis of Human MotionLuisa MendozaPas encore d'évaluation
- Physics by Shailendra Sir: Fnyyh OkysDocument21 pagesPhysics by Shailendra Sir: Fnyyh OkysShailendra SinghPas encore d'évaluation
- Euler Angles and Rotation Matrices SummaryDocument6 pagesEuler Angles and Rotation Matrices Summarywoof1800Pas encore d'évaluation
- Circular Motion Practice Sheet 01Document5 pagesCircular Motion Practice Sheet 01Vikas GuptaPas encore d'évaluation
- Ambitious Academy Lahore: Annual Revision Test SystemDocument2 pagesAmbitious Academy Lahore: Annual Revision Test SystemAmir HabibPas encore d'évaluation
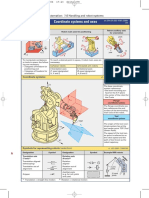
- Mechanical and Metal Trades Handbook 378 enDocument1 pageMechanical and Metal Trades Handbook 378 enTrevor SalazarPas encore d'évaluation
- Intro To Aerial Robotics - Coordinate FramesDocument34 pagesIntro To Aerial Robotics - Coordinate FramesKostas AlexisPas encore d'évaluation
- UNIT 1:: Overview of Graphics System Characteristics of Cathode-Ray Tube (CRT)Document37 pagesUNIT 1:: Overview of Graphics System Characteristics of Cathode-Ray Tube (CRT)Devang JoshiPas encore d'évaluation
- AISSMSCOEDocument3 pagesAISSMSCOEAtharva ChoudhariPas encore d'évaluation
- Transformations Packet-GraseckDocument33 pagesTransformations Packet-Graseckapi-316517647Pas encore d'évaluation
- AnglesDocument44 pagesAnglesIrfan AfzalPas encore d'évaluation
- Transformations Cont.Document17 pagesTransformations Cont.mfaganPas encore d'évaluation
- Plane: KinematicsDocument87 pagesPlane: KinematicsAhmed Sobhi l أحمد صبحيPas encore d'évaluation
- Tippe TopDocument24 pagesTippe TopSwapnil SatardeyPas encore d'évaluation
- Static Equilibrium (Problems)Document5 pagesStatic Equilibrium (Problems)E-m FunaPas encore d'évaluation
- Rotation Dynamics and Angular Momentum PDFDocument4 pagesRotation Dynamics and Angular Momentum PDFTarun GuptaPas encore d'évaluation
- Rotational Motion & System of ParticlesDocument3 pagesRotational Motion & System of ParticlesDaisy RoyPas encore d'évaluation
- 02 02 Rotation of Axes PDFDocument12 pages02 02 Rotation of Axes PDFdeepakPas encore d'évaluation
- Rotational Dynamics - 04-Objective UnSolvedDocument6 pagesRotational Dynamics - 04-Objective UnSolvedRaju SinghPas encore d'évaluation
- Gyroscope Lab ExperimentDocument5 pagesGyroscope Lab Experimentrhusseinpos4765Pas encore d'évaluation
- Dyn 8Document4 pagesDyn 8djole112Pas encore d'évaluation
- 3 TransformationsDocument33 pages3 TransformationsSakshi NailwalPas encore d'évaluation
- IntegrationDocument104 pagesIntegrationPratham MalhotraPas encore d'évaluation
- Name: Teacher: Date: Score:: Find The Missing Angle Measurement in Each Set of Supplementary AnglesDocument2 pagesName: Teacher: Date: Score:: Find The Missing Angle Measurement in Each Set of Supplementary AnglesKlaudette AsuncionPas encore d'évaluation
- New Problem Sheet No. 6.3: (Products of Inertia and Transfer and Rotation of Axis)Document4 pagesNew Problem Sheet No. 6.3: (Products of Inertia and Transfer and Rotation of Axis)Jaiho RandaPas encore d'évaluation
- Msa Lab ManualDocument16 pagesMsa Lab ManualAcchyutjhPas encore d'évaluation
- Chap. 11B - Rigid Body RotationDocument34 pagesChap. 11B - Rigid Body Rotationqwivy.comPas encore d'évaluation