Vous aimerez peut-être aussi
- Compressor Instruction Manual XATS 1050 2654 5440 00 - C9 - LP - EN PDFDocument104 pagesCompressor Instruction Manual XATS 1050 2654 5440 00 - C9 - LP - EN PDFAnie EkpenyongPas encore d'évaluation
- CAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitD'EverandCAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitPas encore d'évaluation
- CD7-60 Year 2003Document96 pagesCD7-60 Year 2003Serrefriair Garcia RefriPas encore d'évaluation
- ASD-T-TriVoltage Service Manual 9 - 5721 - 06Document138 pagesASD-T-TriVoltage Service Manual 9 - 5721 - 06Mario GonzalezPas encore d'évaluation
- 7 7000 Pamod 05eDocument18 pages7 7000 Pamod 05eJose LunaPas encore d'évaluation
- Up 11-22Document91 pagesUp 11-22Tamjid Kabir100% (2)
- Atlas Copco-Other Oil-Injected Rotary Screw Compressors en (Search-Manual-Online - Com)Document9 pagesAtlas Copco-Other Oil-Injected Rotary Screw Compressors en (Search-Manual-Online - Com)Anonymous vRyv4wM100% (1)
- Asd 2C 10224114 10-000 00useDocument136 pagesAsd 2C 10224114 10-000 00useEvandro Jva compressoresPas encore d'évaluation
- Original Operating Manual - SCC Compressors: Version 1.0 E - 28.05.2017Document104 pagesOriginal Operating Manual - SCC Compressors: Version 1.0 E - 28.05.2017lucasPas encore d'évaluation
- Atlas Copco Mkiv-Ethernet-Ip-04 PDFDocument46 pagesAtlas Copco Mkiv-Ethernet-Ip-04 PDFsdk00Pas encore d'évaluation
- Manual SM - 1C - 1846699 - 10-000 - 00EDocument108 pagesManual SM - 1C - 1846699 - 10-000 - 00ESergei KurpishPas encore d'évaluation
- Booste - KK - N 501 1 - 2169 - 30281-02 - 02EDocument53 pagesBooste - KK - N 501 1 - 2169 - 30281-02 - 02Ecancan25Pas encore d'évaluation
- 15 - 100 HP EG Series Screw Compressors USADocument6 pages15 - 100 HP EG Series Screw Compressors USAELGiUSA0% (1)
- Zt110 Apf168611 N BrewriesDocument98 pagesZt110 Apf168611 N BrewriesfaithPas encore d'évaluation
- D Operation ManualDocument136 pagesD Operation ManualJorge Lazarte MPas encore d'évaluation
- Facility Design GuidelinesDocument440 pagesFacility Design GuidelinesWalid Abou HassanPas encore d'évaluation
- 2950 1132 01 XAS146DdGDocument170 pages2950 1132 01 XAS146DdGOSPas encore d'évaluation
- Elektronikon ManualDocument40 pagesElektronikon ManualMark CarterPas encore d'évaluation
- 2954 6220 00 - XA (H) S 107-137 KD (G) - ENDocument92 pages2954 6220 00 - XA (H) S 107-137 KD (G) - ENKari Mohamed100% (1)
- GAVSDs - Atlas Copco - Launch New ProductDocument23 pagesGAVSDs - Atlas Copco - Launch New ProductquocthaitnPas encore d'évaluation
- Air Control 3 Dynamic: ManualDocument53 pagesAir Control 3 Dynamic: ManualmadiPas encore d'évaluation
- G 15 22 Ga 15 26 Ga 11 Plus 30 Ga 15 37 VSD Plus 11 37 KW PDFDocument13 pagesG 15 22 Ga 15 26 Ga 11 Plus 30 Ga 15 37 VSD Plus 11 37 KW PDF林森Pas encore d'évaluation
- Atlas Copco SMARTLINKDocument45 pagesAtlas Copco SMARTLINKahmedalgalo100% (1)
- 357 Basic Xe-M Onboard ControllerDocument300 pages357 Basic Xe-M Onboard ControllerSelamet Rezki100% (3)
- Manuel HetrzDocument128 pagesManuel HetrzHP ServicesPas encore d'évaluation
- Micrologix 1400 IntroductionDocument7 pagesMicrologix 1400 IntroductionsayedmhPas encore d'évaluation
- Alup 2016 ZipDocument80 pagesAlup 2016 Zipluis0% (1)
- Manual Compressor Sigma Control, EnglishDocument151 pagesManual Compressor Sigma Control, EnglishАлександр ЩербаковPas encore d'évaluation
- Manual UsuarioDocument140 pagesManual UsuarioGetse VargasPas encore d'évaluation
- Etaline SYTDocument52 pagesEtaline SYTjprakashusPas encore d'évaluation
- Combi - 3s ManualDocument143 pagesCombi - 3s ManualJessica Paola Dimate Godoy100% (1)
- Security SY0 501 Study GuideDocument39 pagesSecurity SY0 501 Study GuiderePas encore d'évaluation
- SR Mam 860 ManualDocument24 pagesSR Mam 860 ManualGrmaye AsfawPas encore d'évaluation
- ZH 6000-10000 MK 4 İnst BookDocument90 pagesZH 6000-10000 MK 4 İnst BookESRAPas encore d'évaluation
- ZT SeriesDocument66 pagesZT SeriesWell Countryson Lumban TobingPas encore d'évaluation
- Manual Book AII156154 PDFDocument84 pagesManual Book AII156154 PDFkapasariPas encore d'évaluation
- Atlas Copco Stationary Air Compressors: GA5, GA7, GA11C With Elektronikon I or Elektronikon II RegulatorDocument78 pagesAtlas Copco Stationary Air Compressors: GA5, GA7, GA11C With Elektronikon I or Elektronikon II RegulatorKrzysiek PodsiadłoPas encore d'évaluation
- Manual de Servicio UP6 11-22kw - 80448418Document156 pagesManual de Servicio UP6 11-22kw - 80448418Javier ApontePas encore d'évaluation
- 凱薩空壓機Document53 pages凱薩空壓機333-592552100% (1)
- CUSTOM - PLL in FormsDocument10 pagesCUSTOM - PLL in FormsBhargi111Pas encore d'évaluation
- Aib Ga30-55cDocument42 pagesAib Ga30-55cJose CoelhoPas encore d'évaluation
- ZR 315 VSDDocument154 pagesZR 315 VSDLIDAIRPas encore d'évaluation
- Atlas Copco Group Presentation 2005Document51 pagesAtlas Copco Group Presentation 2005Luis Eduardo Corzo Enriquez100% (1)
- GR 110,132,160,200 Instruction Book From SN AIF 078406 20147600Document43 pagesGR 110,132,160,200 Instruction Book From SN AIF 078406 20147600Muhammad Hardius100% (1)
- ZR 55 75 90 ASL EN Antwerp 2930186201Document286 pagesZR 55 75 90 ASL EN Antwerp 2930186201Aljamali AlhofashiPas encore d'évaluation
- Fd60hz Secador Atlas Copco - ManualDocument8 pagesFd60hz Secador Atlas Copco - ManualEdvaldo França100% (1)
- 9820 3582 03 User Guide MKIV Profibus Edition 06Document58 pages9820 3582 03 User Guide MKIV Profibus Edition 06blackberry45Pas encore d'évaluation
- Compresor - ManualDocument220 pagesCompresor - ManualVictorPas encore d'évaluation
- CPA Triplex H EN 1Document20 pagesCPA Triplex H EN 1Nguyễn Tấn KhiêmPas encore d'évaluation
- Beko Drypoint Ra123 - ManualDocument36 pagesBeko Drypoint Ra123 - Manualfgomes100Pas encore d'évaluation
- Almig Flex GB Web 1 2Document8 pagesAlmig Flex GB Web 1 2sebastianPas encore d'évaluation
- DTE BrochureDocument8 pagesDTE BrochureAnwar SaeedPas encore d'évaluation
- ZAnder K-MT PDFDocument6 pagesZAnder K-MT PDFAirpowerService100% (1)
- Atlas Copco Tools Talk Tps ManualDocument76 pagesAtlas Copco Tools Talk Tps ManualClaudio50% (2)
- Attachment PDFDocument156 pagesAttachment PDFLiliana Rebeca Santos santosPas encore d'évaluation
- PT Cemindo Gemilang Rev 1Document11 pagesPT Cemindo Gemilang Rev 1ShahPas encore d'évaluation
- AC Oil-Free Air - ZH+ & ZH 355-900 - 2013 - 0625 - LRDocument16 pagesAC Oil-Free Air - ZH+ & ZH 355-900 - 2013 - 0625 - LRmasrooor100% (1)
- SSR M4 M5,5 M7,5 M11: C.C.N.: 89270342 Date: November 2002Document34 pagesSSR M4 M5,5 M7,5 M11: C.C.N.: 89270342 Date: November 2002juris.ligerisPas encore d'évaluation
- Part ListDocument196 pagesPart ListHfksosnaaoPas encore d'évaluation
- 9820 3582 03 User Guide MKIV Profibus Edition 06 PDFDocument58 pages9820 3582 03 User Guide MKIV Profibus Edition 06 PDFQR JcPas encore d'évaluation
- 9820 3582 03 User Guide MKIV Profibus Edition 06 PDFDocument58 pages9820 3582 03 User Guide MKIV Profibus Edition 06 PDFQR JcPas encore d'évaluation
- CN-0524-G Installation of FleetMaster Technical LogDocument38 pagesCN-0524-G Installation of FleetMaster Technical LogOprea MariusPas encore d'évaluation
- Dokumen - Tips 9820 3582 05 User Guide Mkiv Ethernet Ip 03Document19 pagesDokumen - Tips 9820 3582 05 User Guide Mkiv Ethernet Ip 03AtlasCopcoPas encore d'évaluation
- Field Communication Unit: Reference ManualDocument74 pagesField Communication Unit: Reference ManualRobertt StonePas encore d'évaluation
- Computer Networks: in ThisDocument22 pagesComputer Networks: in Thiskhushi patelPas encore d'évaluation
- List of Mobile Phones Supported OTG Function PDFDocument7 pagesList of Mobile Phones Supported OTG Function PDFCarlos Manuel De Los Santos PerezPas encore d'évaluation
- Quiz in CSSDocument6 pagesQuiz in CSShelen adoPas encore d'évaluation
- Sag Tension (ACCC Casablanca)Document2 pagesSag Tension (ACCC Casablanca)Subodh SontakkePas encore d'évaluation
- Renub Research: Published: May, 2012Document12 pagesRenub Research: Published: May, 2012api-114525849Pas encore d'évaluation
- Cny 17Document9 pagesCny 17Krista TranPas encore d'évaluation
- Kassia Webb - Resume Updtd 11 Dec 2016Document4 pagesKassia Webb - Resume Updtd 11 Dec 2016api-322501460Pas encore d'évaluation
- Siko Product OverviewDocument20 pagesSiko Product OverviewMECING LTDAPas encore d'évaluation
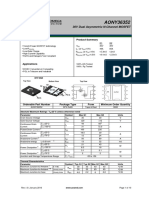
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDocument10 pagesAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Pas encore d'évaluation
- An Acknowledgement LetterDocument1 pageAn Acknowledgement LetterGovindan PerumalPas encore d'évaluation
- WDM Important Questions 1Document3 pagesWDM Important Questions 1PinkPas encore d'évaluation
- Operation & Maintenance ManualDocument3 pagesOperation & Maintenance ManualAhmed TitawiPas encore d'évaluation
- Hyperion EssbaseDocument16 pagesHyperion Essbaseguru_rcpPas encore d'évaluation
- Udl Classroom-Ryan CrumDocument5 pagesUdl Classroom-Ryan Crumapi-663455706Pas encore d'évaluation
- Optical Wireless Communications For Beyond 5G Networks and IoT - Unit 6 - Week 3Document1 pageOptical Wireless Communications For Beyond 5G Networks and IoT - Unit 6 - Week 3Sarika JainPas encore d'évaluation
- Keithley 182 Quick GuideDocument38 pagesKeithley 182 Quick GuideChih-Wei ChangPas encore d'évaluation
- ACS355 Product Presentation RevADocument19 pagesACS355 Product Presentation RevAsayedmhPas encore d'évaluation
- Soft-Switching Bidirectional DC-DC Converter Using A Lossless Active SnubberDocument9 pagesSoft-Switching Bidirectional DC-DC Converter Using A Lossless Active SnubberHsekum RamukPas encore d'évaluation
- Surpac ReportingDocument4 pagesSurpac ReportingDelfidelfi SatuPas encore d'évaluation
- A Branch-And-Bound Algorithm For The Time-Dependent Travelling Salesman ProblemDocument11 pagesA Branch-And-Bound Algorithm For The Time-Dependent Travelling Salesman ProblemDaniel FernándezPas encore d'évaluation
- XW PRO UL9540 Energy Storage Systems InformationDocument7 pagesXW PRO UL9540 Energy Storage Systems InformationMujeeb Ur Rehman KhalilPas encore d'évaluation
- Radio Trimble Trimark 3Document2 pagesRadio Trimble Trimark 3Robinson VargasPas encore d'évaluation
- Lic Unit 1 (1) eDocument114 pagesLic Unit 1 (1) eganeshPas encore d'évaluation
- #14674 Difficulty: Moderate #35626 Difficulty: ModerateDocument4 pages#14674 Difficulty: Moderate #35626 Difficulty: ModerateLaszló KindPas encore d'évaluation
- Assignment 3Document2 pagesAssignment 3usama.m0% (1)
- Case RCBDocument76 pagesCase RCBSaurabh KatariaPas encore d'évaluation